SimMechanics建模仿真
基于Matlab—SimMechanics的MJR混联码垛机器人运动建模及仿真研究
马志德’ ,孙会来’ 。 ,李亚d e ’ , SUN Hu i . 1 a i ,L l Y a — d on g ‘ , LI ANG Do n g
( 1 . 天津工业大学 机 械工程学院 ,天津 3 0 0 3 8 7 ;2 . 天津 市现 代机 电装备技术重点实验室 ,天津 3 0 0 3 8 7 ;
l
訇 地
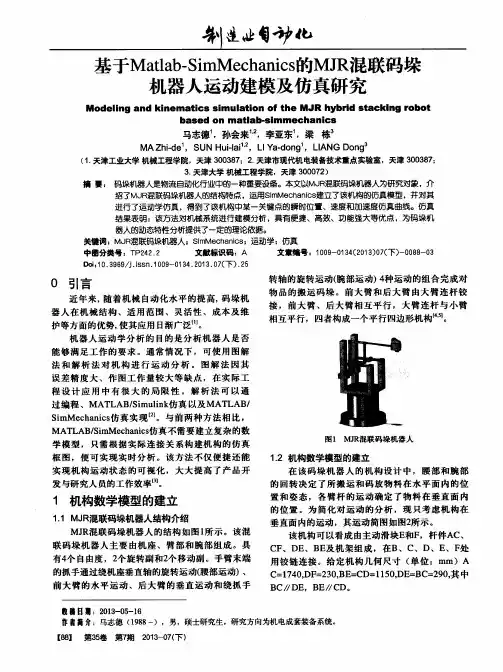
基 于Ma t l a b — S i mMe c h a n i c s 的MJ R 混联 码垛 机器 人运 动建 模及仿真研究
M odel i n g and ki nem at i cs s i m ul a t i on of t he M JR h ybr i d s t acki n g r obot ba sed on m aUab- si m m ech ani cs
程 设 计 应 用 中 有 很 大 的 局 限 性 。 解 析 法 可 以 通
过 编 程 、MAT L AB / S i mu l i n k 仿 真 以及 MAT L AB /
S i mMe c h a n i c s 仿真实现 口 】 。与 前 两 种 方 法 相 比 , MA T L AB / S i mMe c h a n i c s 仿 真 不需 要 建立 复 杂 的数 学 模 型 , 只需 根 据 实 际连 接 关 系构 建 机 构 的 仿 真 框 图 ,便 可 实现 实 时分 析 。该 方 法 不 仅 便 捷 还 能
【 8 8 】 第3 5 卷 第7 期 2 0 1 3 — 0 7 ( 下)
务I
訇 似
仿真时通过S i mMe c h a n i c s 可 视 化工 具 将 机 构 系统
简 化 为 机 构 结 构 的 直 观 显示 。S i mMe c h a n i c s 模 块
基于SimMechanics的挖掘机工作装置运动仿真分析
31铲・装・运本栏目编辑 严 瑾第 41 卷 2013 年第 2 期基于 SimMechanics 的挖掘机工作装置运动仿真分析白鹏伟,史青录,程结结,吴正明,钟 飞太原科技大学机械工程学院 山西太原 030024摘要:为了查找和检验挖掘机工作装置设计方案的问题与缺陷,利用 SimMechanics 工具箱对挖掘机工作装置作业过程进行运动仿真。
通过仿真快速绘制出包络图并验证其工作尺寸参数,使设计人员在设计阶段就可以判断设计方案的合理性。
关键词:SimMechanics;工作装置;包络图;运动仿真中图分类号:TU621 文献标志码:A 文章编号:1001-3954(2013)02-0031-04Simulation and analysis on motion of excavator manipulatorbased on SimMechanicsBAI Pengwei ,SHI Qinglu ,CHENG Jiejie ,WU Zhengming ,ZHONG FeiSchool of Mechnical Engineering, Taiyuan University of Science & Technology, Taiyuan 030024, Shanxi, ChinaAbstract :In order to find out the problems and defects in the design scheme of excavator manipulator,SimMechanics toolbox was used to simulate the motion of the excavator manipulator. After the envelop diagram being plotted rapidly through simulation, the operating parameters were verified. The method could make it possible for designers to judge the reasonableness of design scheme during designing process.Keywords :SimMechanics; manipulator; envelope diagram; motion simulation作者简介:白鹏伟,男,1986 年出生,硕士研究生,主要研究方向为机械与车辆动力学。
SimMechanics简介(官网)
SimMechanics简介(官⽹)SimMechanics⼀、关于SimMechanics软件SimMechanics软件拥有⼀系列的模块库,机械模型和仿真⼯具。
它可以与Simulink配合使⽤。
你可以通过传感器模块和执⾏器模块将SimMechanics 模块和Simulink模块连接起来。
这些模块库⾥的模块是你⽤来建⽴机械系统的基础。
这些机械系统由⼀些刚体组成,⽽这些刚体由代表了平移⾃由度和旋转⾃由度的关节连接起来。
和⽤标准的Simulink⼯具箱建模⼀样,你可以⽤⼀些分层⼦系统表达出你的机械系统。
你可以施加运动约束,应⽤⼒或者转矩,集成⽜顿动⼒学,以及测量最终的运动。
你可以在输送机装备的演⽰模型⾥看到⼀些特征的⼯作情况。
⼆、建⽴机械系统模型以下是你建⽴和运⾏⼀个机械模型所要做的主要步骤,点击最前⾯的链接你可以看到更详细的解释。
1.通过指定刚体的惯性,⾃由度(DoFs)和约束,以及附着在刚体上的坐标系(CSs)来测量运动和⼒。
2.建⽴传感器记录运动和⼒,建⽴执⾏器和⼒的单元去初始化运动和施加⼒(包括连续的和不连续的摩擦⼒)。
3.开始仿真,在维持所施加的约束的同时,让Simulink的解算器去发现系统的运动。
你还可以⽣成,编译,运⾏模型的⽣成代码译本。
4.应⽤SimMechanics的可视化窗⼝,在建⽴你的模型时你可以形象化你的机器,在运⾏你的模型时你可以让仿真动画化。
三、刚体(Bodies),坐标系(CSs),关节(Joint)和约束(Constraints)你可以使⽤刚体模块建⽴你的刚体模型,指定模块的质量,惯量张量和刚体坐标系。
你⽤关节将⼀个刚体和另⼀个刚体连接起来。
关节代表了两个刚体之间可能的运动和系统的⾃由度。
你可以在系统中给刚体所允许的相对运动施加运动约束。
这些约束限制了⾃由度或者使⾃由度成为了时间的显函数。
SimMechanics界⾯给你提供了很多⽅法去指定坐标系,约束或驱动,⼒或转矩。
系统建模与仿真
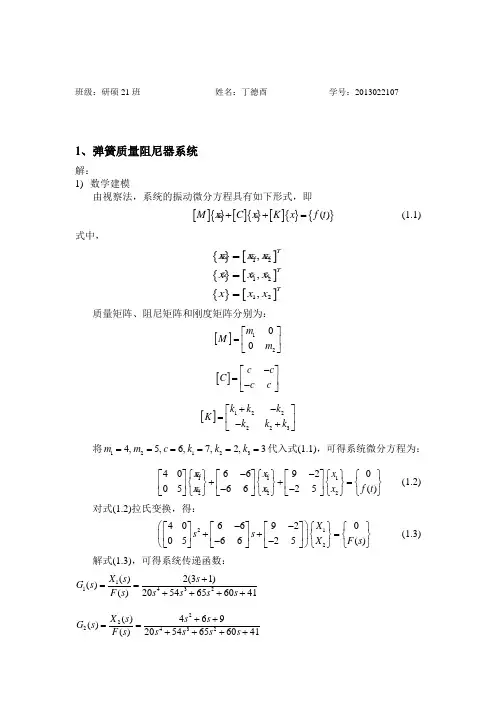
班级:研硕21班 姓名:丁德酉 学号:20130221071、弹簧质量阻尼器系统解:1) 数学建模由视察法,系统的振动微分方程具有如下形式,即[]{}[]{}[]{}{}()M x C x K x f t ++=(1.1)式中,{}[]{}[]{}[]121212,,,TTTx x x x x x x x x ===质量矩阵、阻尼矩阵和刚度矩阵分别为:[]1200m M m ⎡⎤=⎢⎥⎣⎦[]c c C c c -⎡⎤=⎢⎥-⎣⎦[]122223k k k K kk k +-⎡⎤=⎢⎥-+⎣⎦将121234,5,6,7,2,3m m c k k k ======代入式(1.1),可得系统微分方程为:1112224066920056625()x x x x x x f t --⎧⎫⎧⎫⎧⎫⎡⎤⎡⎤⎡⎤⎧⎫++=⎨⎬⎨⎬⎨⎬⎨⎬⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎩⎭⎩⎭⎩⎭⎩⎭ (1.2)对式(1.2)拉氏变换,得:1224066920056625()X s s X F s ⎛--⎫⎧⎫⎡⎤⎡⎤⎡⎤⎧⎫++=⎨⎬⎨⎬ ⎪⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎩⎭⎩⎭⎝⎭ (1.3)解式(1.3),可得系统传递函数:11432()2(31)()()2054656041X s s G s F s s s s s +==++++ 222432()469()()2054656041X s s s G s F s s s s s ++==++++Matlab语音描述如下:num1=[6 2];num2=[4 6 9];den=[20 54 65 60 41];sys1=tf(num1,den),sys2=tf(num2,den) step(sys1,'k',sys2,'k-.'),grid on legend('sys1','sys2')命令窗口输出如下:sys1 =6 s + 2------------------------------------ 20 s^4 + 54 s^3 + 65 s^2 + 60 s + 41Continuous-time transfer function.sys2 =4 s^2 + 6 s + 9------------------------------------ 20 s^4 + 54 s^3 + 65 s^2 + 60 s + 41Continuous-time transfer function.系统单位阶跃响应如图1.1所示。
基于Simmechanics的典型机构动力学仿真
4 结 束语
通过MAT L AB / S i mMe c h a n i c s 为平 台对 曲柄 滑块机 构 进行仿真 ,能 方便 、快捷得 到机构 的运动 、动力数据 。与 其他通 过编程 实现的运动 分析仿真 方法相 比 ,它更 方便 直
f 3 】徐梓 斌, 闵剑 青. 基于S i mMe c h a n i c s 的曲柄滑块机 构运动分析 u J . 煤矿机 械, 2 0 0 4 , ( 1 ) : 6 3 - 6 5
( 上 接7 9 页)
A n d o n 装 置是 一套 专门为汽 车生 产、装配线设计信息管理和 控制 系统 ,已经成 为汽车完整生 产线 中不 可缺少一 部分 ,
观 ,服 务 于理 论 力 学教 学 。
[ 4 ]郑 宏伟, 李平康 . 基于S i mMe c h a n i c s 的四杆 机构仿真技术 卟 机 电
工程 技术 , 2 0 0 5 , 3 4 ( 5 ) : 6 2 — 6 5 [ 5 ]田永 利 , 邹慧 君 , 郭为 忠 等 . 基 于 Ma t l a b — S i m Me c h a n i c s的 机 电 产 品 组 成 建 模 与仿 真 技 术 研 究 U】 . 机 械 设 计 与 研
参 考 文献
[ 1 ] Yu i f e Cu i d i a n g n i n g Hu a . Mo d e l i n g a n d S i mu l a t i o n o f a Ma n i p u l a t o r B a s e d o n Ma t l a b wi t h S i mMe c h a n i c s [ J ] . I n t e na r t i o n a l Co n f e r e n c e o n I n t e l l i g e n t I n f o r ma t i o n T e c h n o l o g y Ap p l i c a i t o n , 2 0 1 0 , ( 4 ) : 4 9 5 — 4 9 8
基于MatlabSimMechanics的机械结构仿真技术研究
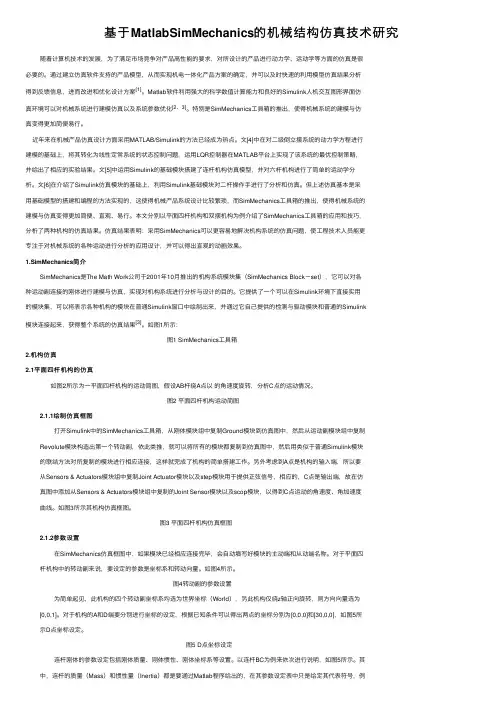
基于MatlabSimMechanics的机械结构仿真技术研究随着计算机技术的发展,为了满⾜市场竞争对产品⾼性能的要求,对所设计的产品进⾏动⼒学、运动学等⽅⾯的仿真是很必要的。
通过建⽴仿真软件⽀持的产品模型,从⽽实现机电⼀体化产品⽅案的确定,并可以及时快速的利⽤模型仿真结果分析得到反馈信息,进⽽改进和优化设计⽅案[1]。
Matlab软件利⽤强⼤的科学数值计算能⼒和良好的Simulink⼈机交互图形界⾯仿真环境可以对机械系统进⾏建模仿真以及系统参数优化[2、3]。
特别是SimMechanics⼯具箱的推出,使得机械系统的建模与仿真变得更加简便易⾏。
近年来在机械产品仿真设计⽅⾯采⽤MATLAB/Simulink的⽅法已经成为热点。
⽂[4]中在对⼆级倒⽴摆系统的动⼒学⽅程进⾏建模的基础上,将其转化为线性定常系统的状态控制问题,运⽤LQR控制器在MATLAB平台上实现了该系统的最优控制策略,并给出了相应的实验结果。
⽂[5]中运⽤Simulink的基础模块搭建了连杆机构仿真模型,并对六杆机构进⾏了简单的运动学分析。
⽂[6]在介绍了Simulink仿真模块的基础上,利⽤Simulink基础模块对⼆杆操作⼿进⾏了分析和仿真。
但上述仿真基本是采⽤基础模型的搭建和编程的⽅法实现的,这使得机械产品系统设计⽐较繁琐,⽽SimMechanics⼯具箱的推出,使得机械系统的建模与仿真变得更加简便、直观、易⾏。
本⽂分别以平⾯四杆机构和双摆机构为例介绍了SimMechanics⼯具箱的应⽤和技巧,分析了两种机构的仿真结果。
仿真结果表明:采⽤SimMechanics可以更容易地解决机构系统的仿真问题,使⼯程技术⼈员能更专注于对机械系统的各种运动进⾏分析的应⽤设计,并可以得出直观的动画效果。
1.SimMechanics简介SimMechanics是The Math Work公司于2001年10⽉推出的机构系统模块集(SimMechanics Block-set),它可以对各种运动副连接的刚体进⾏建模与仿真,实现对机构系统进⾏分析与设计的⽬的。
基于SimMechanics的六自由度加载平台仿真研究
图4 SimMechanics的机械系统模型
2.4液压驱动系统建模
液压驱动系统包括电液伺服阀、单出杆非对称液压作 动筒、负载及载荷/位移传感器等。电液伺服阀根据控制 器的输出信号转换为对应流量,驱动非对称缸运动;位移
Joint Sensor
图5液压作动筒的模型结构
传感器测量非对称缸位移变化,作为系统闭环控制反馈 值;载荷传感器对负载受力进行监控。
-85 -
•信息技术•
周挺,等•基于SimMechanics的六自由度加载平台仿真研究
控制参数,驱动液压作动筒协调加载运动,进行位控模式 的闭环控制,实现动平台六自由度控制。
图2系统控制框图
2系统建模
2.1运动学反解
并联机构的运动学反解是指已知平台位姿参数,求解 支杆伸缩长度的过程。图3为六自由度加载平台的空间 结构示意图和运动学简化模型。
关系,各液压作动筒在基坐标系中的方向矢量Lb表示为
£b = Pb-fib = TxPp +S-fib
(3)
L:的标量| Lb |为各液压作动筒的瞬时长度,初始长 度Li0可由Pi、Bi的初始位置得到,动平台运动时各液压作 动筒的伸缩量ALi为
△厶=Lb -Li0= (TxPp+S-Bb)( TxPp+S-Bb)T-Li0
中qc为伺服阀零位泄露流量,ApN为额定压降。
考虑液压缸的内泄漏、外泄漏和压缩性流量,其流量
连续性方程为
X +C +a (A|+A2) -
Kt -
qL= 2
P P tp L 20 PL
负载流量qL的线性化方程为
- qL=饨Xv %c?L= qLO-cPL
(12)
基于SimMechanics的单摆机构运动分析与仿真
基于SimMechanics的单摆机构运动分析与仿真王国明;代循龙【摘要】采用SimMechanics模块建立了单摆系统的仿真模型,提出运用SimMechanics模块对单摆系统进行运动分析的方法,检测单摆系统的运动曲线。
仿真表明:利用SimMechanics模块对单摆机构进行建模,所获曲线平滑无冲击,且建模过程方便简单,仿真直观,数据可靠,为其他复杂的机械结构提供一种仿真手段。
【期刊名称】《数字技术与应用》【年(卷),期】2016(000)003【总页数】2页(P63-64)【关键词】单摆;SimMechanics;仿真;模型【作者】王国明;代循龙【作者单位】滨州学院机电工程系山东滨州 256600;昌乐县第二实验小学山东昌乐 262400【正文语种】中文【中图分类】TN915.6单摆是一种理想的物理模型,是指在一根不能伸长而且没有质量的线下端系一个质点,这是一个理想化的模型。
单摆的应用十分广泛,古人曾用单摆来计量时间,而现在人们把单摆应用于弹簧振子、钟摆、音叉等各个领域。
本文利用MATLAB中的SimMechanics模块对单摆机构进行运动分析与仿真,并获得单摆运动的角度、角速度等曲线。
MathWorks公司于2001年10月推出了机构系统建模和分析系统(SimMechanics Blockset),借助于MATLAB/Simulink及其虚拟现实工具箱,允许用户对机构系统进行仿真分析。
SimMechanics模块可以对运动副连接的刚体进行建模与仿真,实现对机构系统进行分析与设计的目的。
SimMechanics模块可以对三维系统的转动等进行仿真,并提供一系列的工具用以求解带有静力学约束、坐标系变换等在内的机构系统的运动学问题,并利用虚拟现实工具箱提供的功能显示机构系统运动的动画示意图[1-5]。
本文将建立一个振动角度[6-8]大于10°的单摆系统,并通过SCOPE模块查看单摆的各种运行曲线。
基于MATLAB_SimMechanics的四缸内燃机曲柄连杆机构仿真和动力学分
图 7 活塞 1 和 2 的受力图
收稿日期 :20051128 收修改稿日期 :20060303 基金项目 :上海市重点学科建设项目资助 (T0502)
上海市教委项目 (05EZ30) 作者简介 :吴觉士 (1980- ) ,男 ,江苏南京人 ,汉族 ,硕士研究生
(上接第 33 页)
4 结论
从以上分析和仿真结果来看 , 混合驱动凸轮连杆 机构可以适应各种设计条件的限制 , 兼有凸轮机构和 连杆机构两者的效能 。由于凸轮轮廓的存在 , 增添了 凸轮机构所特有的多方面适应性 , 能够在一定的柔性 空间范围内精确实现成组的复杂轨迹 。混合驱动凸轮 连杆机构中使用的是凸轮摆杆机构 , 使得整个机构系 统的运转始终处于一个比较小的范围内 , 不但节省了 空间 ,而且每个杆可以比较容易的控制在压力角很小 的范围内进行运动 。另外 , 按照以上提供的方法进行 凸轮连杆机构的设计 ,还可以避免出现“奇异”位置 ,从 而增加了机构运行的可靠性 。本文对混合驱动凸轮连 杆机构的分析对以后动力学分析 、功率分配以及尺度 综合提供了重要的依据 。
使用 Simulink 里 的 输 出 模 块 以 矩 阵 的 形 式 ( 名 为
“simout5”) 输 出 到 MATLAB工 作 空 间 ; 在 活 塞 1 的
“Connecting2rod2clevel-1--piston-1
”运动副处添加
一个“JointSensor6 ”检测模块用来获得活塞 1 的受力 ,
SimMechanics模块组中包含下面几个子模块组 : 刚体模块组 该模块组包含刚体 ,机架和环境 设定 3 个模块 。 运动副模块组 提供了各种运动副的模块 ,如 回转副 、平面副等 ,可以用这些运动副来连接刚体 ,构 造所需的机构 。 约束与传动模块组 包含静力学约束的模块 , 如齿轮约束等 ,还有各种传动模块 。 检测与驱动模块组 通过检测模块可以得到机 构运行的信息 。驱动模块用来给机构添加动力 ,如力 (力矩) 或位移 (角位移) 等等 。 力元件模块组 力元件模块组提供模块用于在 刚体之间产生力或者转矩 。 辅助工具模块组 该模块允许在其他模块中添 加节点 ,或将信息转换成虚拟现实工具箱用的数据 。 SimMechanics建模方法同 Simulink建模相似 ,采用 拖动相应模块到工作区域 ,设定属性并将其连接起来 。 图 1 所示即为曲柄摇杆机构的 SimMechnics模型图 。 除了上述的常规建模方法之外 ,SimMechanics还 提供了一种更快捷的建模方法 ———将 CAD软件 Solid2 Works建成的三维模型转换成 SimMechanics模型 。通 过 CAD 转换器 ,转换成 XML格式的文件 , 然后通过 SimMechanics模型生成器生成 SimMechanics模型 。 下面通过对四缸内燃机的机构动力学分析来说明 如何通过用 CAD模型转换器将 CAD模型转换成 Sim2 Mechanics模型的建模方法来进行运动仿真 。
基于SimMechanics的三自由度并联打磨机构动力学分析与仿真
·制造业信息化·收稿日期:2011-05-16作者简介:解本铭(1956-),辽宁彰武人,教授,工学硕士。
研究方向:民航设备机电液一体化;孔维定(1984-),河南信阳人,硕士研究生。
研究方向:民航设备机电液一体化。
0引言目前电力行业中的中小型企业生产的悬锤产品,采用铸造工艺,在热镀锌工序之前需要打磨表面的毛刺,而进口专用机械设备价格较高、手工打磨效率低且劳动力成本高,为了解决上述问题,根据三自由度并联机构以其驱动元件少、造价低、结构紧凑及工作空间大等优点而有较高的实用价值[1],设计了一款新型三杆三自由度平移并联机构,改变控制程序和更换夹具可以打磨不同型号的铸件,生产效率高,能够很好的满足客户需求。
本文首先对三自由度并联打磨机构(3-P4R 并联机器人)进行了运动矩阵变换和动力学分析,计算构件及关节的质量、转动惯量、惯性力,并借助于Matlab/SimMechanics[2]工具箱的系统动态建模功能,搭建了一仿真平台。
接着在并联机器人与外界环境相互作用时,动平台在与负载接触的地方要产生末端受广义力矢量(力F 和力矩T )的条件下,对系统进行动力学仿真与分析。
1并联机构运动学分析(1)并联机构构型。
该并联机构由动平台pt 、3个P4R 型支链腿、三根滚珠丝杠组合成的导轨构成,并联打磨机构简图如图1所示。
每个支链腿都是依次由一个滑块、第一个虎克铰、一个中间连杆、第二个虎克铰组基于SimMechanics 的三自由度并联打磨机构动力学分析与仿真解本铭,孔维定(中国民航大学航空自动化学院,天津300300)摘要:针对一种新型三自由度并联打磨机构进行了运动学和动力学分析,并借助于MatLab/SimMechanics工具箱的系统动态建模功能,搭建了一精确的仿真平台。
结果表明:当并联打磨机构末端受广义力矢量作用时,在仿真平台上对系统进行Lagrange 方法的动力学仿真分析,示波器跟踪动平台中心点的位置、速度及加速度,从而获得驱动关节力和动平台位姿的函数曲线关系,可验证所设计机构的动力学特性是否理想。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
模块组
刚体子模块组(Bodies)、约束与驱动模块组(Constraints&Drivers)、力单元模块组(Force Elements)、接口单元模块组(Interface Elements)、运动铰模块组(Joints)及传感器和激励器模块组(Sensors&Actuators)和辅助工具模块组(Utilities)。
1刚体子模块组(Bodies):
此模块组包括四个模块:刚体(Body)、机架(Ground)机械环境(Machine Enviroment)和共享机械环境(Shared Enviroment)。
刚体有两个连接端,其中一个为主动端,另一端为从动端。
使用刚体时可以定义质量、惯性矩、坐标原点、刚体的初始位置和角度。
机架只有一个连接端,另外一个固定。
机械环境是为仿真定义环境变量。
包含有重力、维数、分析模式、约束求解器、误差、线性化和可视化。
共享环境联接两个刚体模块使他们享有相同的机械环境。
2约束与驱动模块组(Constraints&Drivers)
Angle Driver:设定两个刚体坐标间的角度。
Distance Driver:设定两个坐标原点的距离。
Gear Constraint:齿轮约束。
Linear Driver:确定两个刚体坐标间的向量差。
Parallel Constrant:平行约束。
Point-Constraint:曲线约束。
Velocity Driver:确定两个刚体坐标间的相对线速度和角速度。
3力单元模块组(Force Elements)
Body Spring&Damper:在两个刚体之间施加线性阻尼振子。
Joint Spring&Damper:在两个刚体间的单自由度铰或单自由度转动铰建立一个线性阻尼振荡力或力矩。
4接口模块组(Interface Elements)
分别提供移动副接口和转动副接口。
5运动铰模块组(Joints)
此模块组中提供了各种运动铰,利用这些运动铰就可以将刚体构件连接起来。
分别有Bearing(三个方向转动)、Bushing(三个方向移动,三个方向转动)、Custom Joint(自定义铰)、Cylindrical(柱面铰)、Gimbal(万向铰,旋转三个角度)、In-plane(平面内移动)、Planar (平面铰)、Prismatic(单自由运动铰)、Revolute(单自由转动铰)、Screw(螺旋铰)、Six-DoF (六自由度)、Spherical(球面铰,三个自由度)、Telescoping(一个方向移动一个方向转动)、Universal(万向铰,旋转两个角度)、Weld(刚节点)。
打开其中包含的两个子模块组Disassembled Joints和Massless Connectors。
1.双击Disassembled Joints,弹出如图模块组,其中模块是分解后的铰,不同于Joints 中对应的铰,它们有不同的基准点。
2.双击Massless Connectors,弹出如图模块组,其中模块是Joint中对应的铰的组合。
6传感器与激励器模块组(Sensors&Actuators)
该模块组中的模块用来和普通的Simulink模块进行数据交换。
Body Actuator:通过广义力或力矩来驱动刚体。
Body Sensor:刚体检测模块。
Constraint&Drivr Sensor:检测一对受约束刚体间的力或力矩。
Driver Actuator:对一对互相约束的刚体施加相对运动。
Joint Actuator:在铰链处施加力或力矩。
Joint Initial Condition:在仿真之前给铰施加初始位移和速度。
Joint Sensor:铰检测模块。
Joint Stiction Actuator:给铰施加初始位移和速度。
Variable Mass&Inertia Actuator:在一个坐标系中,刚体的质量随时间变化。
7辅助工具模块组(Utilities)
Connection Port:子系统物理建模连接端口。
Continuous Angle:将传感器输出的非连续、有界角度转换成无界连续的角输出。
Convert from Rotation Matrix to Virtual Reality Toolbox:将3*3的旋转矩阵转换成等价的VRML(虚拟现实语言)的旋转轴和角的形式。
Mechanical Branching Bar:将多个sensor/actuator映射为铰(Joint)、约束(Constraint)、驱动器(Driver)或刚体坐标的系统的一个sensor/actuator端口。
SimMechnics建模
1.建模基本步骤
不管模型有多么复杂都可以用同样的步骤建立模型。
这些步骤有些类似建造一个Simulink模型。
(1)选择Groud、Body、和Joint模块:从Bodies和Joints模块组中拖放建立模型所必需的Body和Joint模块,还包括Machine Environment模块和至少一个Ground模块到Simulink窗口中。
其中各个模块介绍如下:
Machine Environment模块是用来设定机器的机械参数设置。
Ground模块表示将一个系统固结在一个惯性系统中。
Body模块就表示刚体构件。
Joint模块表示互相连接构件之间的相对运动。
(2)定位于联接模块:将Joint和Body模块拖放到适当的位置,然后按正确的顺序将它们依次连接起来,可参考如下形式:
Machine Environment—Ground—Joint—Body—Joint—Body--……--Body 整个系统可以是一个开环的或者是闭环的拓扑结构,但至少有一个构件是Ground模块,而且有一个环境设置模块直接与其相连。
一个构件可能不止两个铰(Joint),即可以产生分支。
但是一个较只能连接两个构件。
(3)配置Body模块:双击模块,打开参数对话框,配置质量属性(质量和惯性矩),然后确定Body模块和Ground模块与整体坐标系或其他坐标系之间的关系。
(4)配置Joint模块:双击模块,打开参数对话框,设置移动或转动轴,或球面铰结点等。
(5)选择、连接和配置Constraint模块和Driver模块:从它们的模块库中添加模块到模型窗口中,打开并配置它们每一个对话框,为了限制或驱动Constraint/Driver所连接的两个构件的相对运动。
(6)选择、连接和配置Actuator和Sensor模块:从对应的模块库中添加所需模块至模型窗口,并依次连接。
通过Actuator模块确定控制信号,通过Sensor模块测量运动。
Actuator、Sensor模块实现SimMechanics模块与Simulink模块的连接。
利用这两个模块就能够达到与Simulink环境实现信号传递。
同时,Actuator模块从Simulink模块接受信号(如
Sources模块库)来激励机构运动。
Sensor模块的输出端口向Simulink中输出信号(Sinks 模块库),反馈输出结果。
(7)装入子系统:在SimMechanics模块建造的系统完成后就可以装入子系统作为一个模块进行调用,就如同Simulink中的子系统一样使用。
通过SimMechanics中的Utilities 模块库中的Connection Port模块可将SimMechanics模型作为子系统与一个更大的模型连接起来。
2.配置、运行模型基本步骤
将模块都连接好后,此时的模型还需要确定如何运行,确定各项设置及装载可视化。
(1)SimMechanics为运行机器模型提供了四种分析方式,最常用的是Forward Dynamics方式。
但是对于一个机器更加完整的分析就需要用到其他三种方式。
可以对于一个模型创建多个版本,在同样的基本组合结构下,为每一个版本连接不同的Actuator模块和Sensors 模块,以及不同的配置。
(2)使用SimMechanics强大的可视化和动画显示效果。
在建造模型的同时,或者模型完成后,但必须是在开始仿真之前,可以利用可视化效果,来调试机器的几何形状。
还可以在仿真的同时进行动画显示。
(3)在Machine Environment对话框中设定分析方式以及其他的重要机械设置。
在Simulink Configuration Parameters中设置可视化和调整仿真设置。