超磁致伸缩致动器功率驱动装置的谐波分析及抑制
超磁致伸缩作动器动力学模型构建及特性分析研究

超磁致伸缩作动器动力学模型构建及特性分析研究超磁致伸缩作动器动力学模型构建及特性分析研究引言超磁致伸缩作动器是一种基于磁性材料的智能材料致动器,具有高精度、高刚度、高运动分辨率和快速响应等特点,被广泛应用于精密定位、振动控制和自适应结构等领域。
了解超磁致伸缩作动器的动力学特性对于优化其设计和控制具有重要意义。
本文基于磁力平衡原理和动力学分析方法,提出了一种超磁致伸缩作动器动力学模型,并对其特性进行了分析研究。
模型构建超磁致伸缩作动器由磁铁、线圈和磁致伸缩材料组成。
在模型构建中,假设线圈内部感应电阻可忽略不计,并忽略壳体和线圈之间的磁阻。
通过磁力平衡原理,可以得到作动器的力学模型。
首先,根据安培定律,作用在线圈上的磁力可以表示为:Fm = B · I · l其中,Fm表示磁力,B是磁感强度,I是线圈电流,l是线圈长度。
通过磁感强度和线圈电流的关系可以得到:B = μ0 · (H + Ms · M)其中,μ0表示真空中的磁导率,H是外加磁场强度,Ms是磁致伸缩材料的饱和磁化强度,M是磁化强度。
接下来,根据赫斯定律和欧姆定律,可以得到线圈受到的电动势和电阻:E = -dφ/dt = - N · d(B · S)/dt = -N · S · d(B · I)/dt其中,E表示电动势,N表示线圈匝数,S表示线圈截面积。
根据电动势和电阻的关系可以得到:E = R · I + L · dI/dt其中,R表示线圈电阻,L表示线圈电感。
最后,根据牛顿第二定律,可以得到作动器的动力学方程: Fm - Fd - Fs = m · a其中,Fd表示阻尼力,Fs表示弹簧力,m表示作动器的质量,a表示作动器的加速度。
特性分析基于上述模型,可以对超磁致伸缩作动器的特性进行分析。
首先,通过数值方法求解动力学方程可以得到作动器的位置、速度和加速度随时间的变化。
超磁致伸缩驱动器原理分析及实验研究
磁致伸 缩现 象是 指 铁 磁 体在 外 磁 场 中磁 化 时 ,
移域 、 微动力 ( 薄膜 材料 ) 和力 学 传 感领 域 都有 良好
其长度 及体 积 均 发 生 变 化 , 掉 外 磁 场 后 , 又恢 去 其
复原来 的 尺 寸 。磁 致 伸 缩 材 料 是 实 现 电 磁 能一 机
向 : 控 制 技 术 与 自动 化 。E m i sl e 0 @ 13 emo 车辆 — al oi r 7 6 .o : d0
图 1所示 。驱 动器 中的隔板 沿轴 向把 驱动器 分为两
1 期 1
席建敏 , : 等 超磁致 伸缩驱 动器原理分析及 实验研究
表 2 驱 动 器 主 要 设 计 参 数
超磁 致伸缩 微 位 移驱 动 器 工作 原 理 为 : 磁 致 超
伸缩驱动器是利用 G M 棒在外 部磁场发 生变化 M
时, 发生 相 应伸 缩 变 形 的 规 律设 计 制 作 的 , 构 如 结
第一作者简介 : 建敏 (9 4 ) 男 , 席 18 一 , 福建人 , 硕士研 究生 , 研究 方
于智 能材料 的一种 , 被视 为 2 世 纪提 高军工 与高 新 l
技术 的战 略性 功 能材料 … 。 应用超 磁 致 伸 缩 材 料 开 发 的产 品 已被 证 明 其
文依据 超磁 致伸缩 材 料 特性 , 研究 超 磁致 伸 缩 致动 器 的位 移输 出特性 , 示 超 磁 致伸 缩 致动 器 在 不 同 揭
输 出特性之间的变化 关系。通过 已有设备构建实验平 台, 在不同的条件 下对驱 动器输 出特性进行 实验 , 实验 结果与理论分析
一
致 , 示 了输入 与输 出的特性 , 揭 为驱动器 的优化奠定 了基 础。
超磁致伸缩驱动器的热致输出及其抑制方法
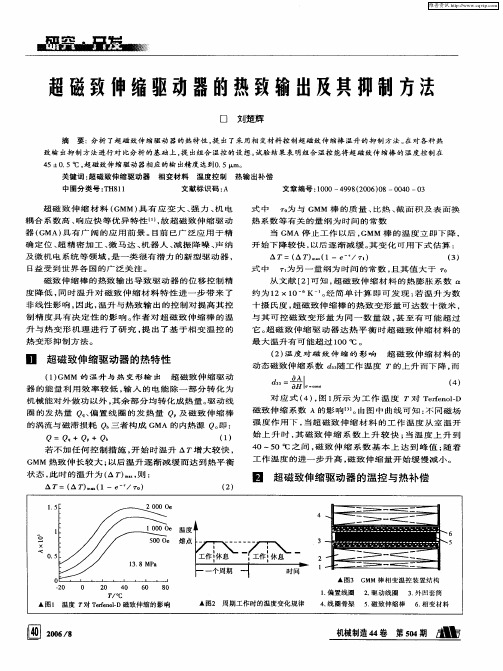
对 应 式 ( , 1 示 为 - 作 温 度 T对 T r n lD 4) 图 所 1 - ef o— e 磁 致 伸 缩 系 数 A的影 响 b 。 图 中 曲 线 可 知 : 同 磁 场 】由 不 强 度 作 用 下 , 超 磁 致 伸 缩 材 料 的 工 作 温 度 从 室 温 开 当 始 上 升 时 , 磁 致 伸 缩 系 数 上 升 较 快 ; 温 度 上 升 到 其 当 4 0~5 0℃ 之 间 , 致 伸 缩 系 数 基 本 上 达 到 峰 值 ; 着 磁 随
( ) = Q/ … △麒
(, 5}
式 中 △ 表 示 相 变 材 料 的 熔 化 潜 热
关键词 : 磁致伸缩驱动器 超 相 变 材料 温度控制 热 输 出 补偿
中图 分 类 号 :H 1 T 81
文 献 标 识 码 : A 式 中
文 章 编号 :0 0— 9 8 2 0 )8— 0 0— 3 1 0 4 9 (0 6 0 0 4 0 o 与 GMM 棒 的 质 量 、 热 、 面 积 及 表 面 换 为 比 截
升 与 热 变 形 机 理 进 行 了 研 究 , 出 了 基 于 相 变 温 控 的 提 热变形 抑制 方法 。
从 文献 [】 知 , 磁 致 伸缩 材料 的热膨 胀 系数 2可 超 约为 1 2×1 K~。 简 单 计 算 即 可 发 现 : 温 升 为 数 0 经 若 十摄 氏度 , 磁致 伸 缩棒 的 热致变 形 量 可达 数十 微米 , 超 与其 可 控磁 致 变形 量 为 同一 数量 级 , 至有 可 能 超过 甚 它 。 磁 致 伸 缩 驱 动 器 达 热 平 衡 时 超 磁 致 伸 缩 材 料 的 超
工 作 温度 的进一步 升 高 , 致伸 缩 量开 始缓 慢减 小 。 磁
超磁致伸缩振动器谐振频率自感知机理研究
逆 转 换 是 自 感 知 理 论 的 物 理 基 础 ’。 G ri 。 ac a和
Jn s 给 出 自感 知 的定 义为 : oe “自感 知驱 动技术 就是 为
从 驱动器 中分 离 出敏 感 信 号所 采 取 的一 切 方 法 , 敏 且 感 信号与 驱动器 控 制 信 号 是 相 互 独 立 的 ” 。对 于 同一 物性 的传感 器与 驱动器 本 来就 是 同一 种 效应 下 的 不 同 功能, 即传 感 器 与驱 动 器 所 应 用 的 效 应 互 为 逆 效 应 。
振
第 2 第 3期 9卷
动
与
冲
击
J OURNAL OFVI BRAT ON AND HOCK I S
超 磁 致 伸 缩 振 动 器 谐 振 频 率 自感 知 机 理 研 究
徐爱群 ,宋小文 ,胡树根
( .浙江大学 机械与能源工程学院 , 1 杭州 30 2 ; .嘉兴学 院 机械工程 学系 , 10 7 2 嘉兴 34 0 ) 10 1
点往往 会发 生 变化 , 难 使 整 个 振 动 切 削 系统 实 现谐 很
现感 知 功 能 。若 利 用 超 磁 致 伸 缩 振 动 器 的 自感 知 功 能 , 知 得到振 动 系统 的谐 振 频 率 , 可实 现无 传 感 器 感 则 方式 的谐振 频率 自动 跟踪 。 自感 知 振 动器 有 如下 优越 性 :1 ( )从 设计安 装 角度看 , 自感 知振 动 器作 为一 个器 件与 机械本 体集 成 , 使被 控 制 对象 减 小体 积 , 低重 可 降 量 , 构 紧凑 , 加设计 的 自由度 , 低安 装难 度 。 ( ) 结 增 降 2
会 产生 明显 的涡 流 损耗 , 需要 对 棒 进 行 纵 向切 片叠 层
谐振式超磁致伸缩音频驱动器设计

谐振式超磁致伸缩音频驱动器设计
王霞;周建军;孟爱华
【期刊名称】《机电工程》
【年(卷),期】2010(027)006
【摘要】超磁致伸缩驱动器具有输出振幅过小导致转换效率不高的问题,针对此问题提出了谐振式超磁致伸缩音频驱动器的理念,利用音叉的机械结构实现了超磁致伸缩驱动器振幅的放大,同时利用音叉的频响曲线去修正超磁致伸缩驱动器的频响曲线,以提升扬声器响度.研究了音叉的选择,及其中超磁致伸缩驱动器的具体设计过程,并在专业消音室对谐振式超磁致伸缩音频驱动器进行了性能测试,测试结果表明驱动器改进后超磁致伸缩扬声器在音响上有显著提升.
【总页数】5页(P35-39)
【作者】王霞;周建军;孟爱华
【作者单位】杭州电子科技大学,机械工程学院,浙江,杭州,310018;杭州电子科技大学,机械工程学院,浙江,杭州,310018;杭州电子科技大学,机械工程学院,浙江,杭州,310018
【正文语种】中文
【中图分类】TH7;TG14
【相关文献】
1.基于超磁致伸缩材料的驱动器设计及磁场仿真 [J], 蒋敏; 邱冶; 成玫; 李芳; 丁晓影; 刘旭辉
2.稀土超磁致伸缩驱动器激励线圈设计与仿真 [J], 闫洪波; 高鸿; 郝宏波; 张瞻; 庄福禄
3.超磁致伸缩驱动器偏置磁场分布结构设计 [J], 闫洪波; 牛禹; 高鸿
4.基于FPGA的超磁致伸缩驱动器程控电流源设计 [J], 熊美俊; 王传礼; 喻曹丰; 崔路飞
5.温控型超磁致伸缩驱动器的设计与实施方式 [J], 张贤才;杨博;郭恩平
因版权原因,仅展示原文概要,查看原文内容请购买。
基于超磁致伸缩材料的谐波电机研究的开题报告
基于超磁致伸缩材料的谐波电机研究的开题报告一、研究背景和意义随着科技的不断发展,人们对于电动驱动系统的要求越来越高,尤其是对于小型电动驱动系统。
传统的电磁式电机因结构庞大,效率低下以及制造成本高等缺点,在某些应用场合可能无法胜任,于是人们开始寻求新型的电机结构。
超磁致伸缩材料作为一种新型的智能材料,具有磁致伸缩效应、高灵敏度、高度集成化等特点,目前已经广泛地应用于传感、执行器等领域。
在这项技术的基础上,研究人员提出了一种基于超磁致伸缩材料的谐波电机结构,该结构具有结构简单、精度高、响应速度快等优点,因此受到越来越多的关注。
本项目旨在通过对该电机结构的研究,进一步提高小型电动驱动系统的性能和可靠性。
二、研究内容和技术路线1.理论分析:对基于超磁致伸缩材料的谐波电机结构进行理论分析,包括力学原理、磁学原理、电学原理等,建立数学模型,为后续实验提供理论依据。
2.电机设计:根据理论分析结果进行电机设计,确定电机的结构参数、材料选用等方面,以满足性能和可靠性的要求,并考虑制造成本的影响。
3.电机制造:根据电机设计结果进行实际制造,包括超磁致伸缩材料的处理、电机零部件的加工、装配等环节。
4.电机性能测试:对电机进行性能测试,包括输出功率、效率、响应速度、精度等参数的测试及分析。
研究不同因素对电机性能的影响规律,确定电机在实际应用中的优化方案。
5.应用研究:将研究结果应用于小型电动驱动系统,对比传统电磁式电机和基于超磁致伸缩材料的谐波电机在实际工作中的性能表现,验证研究成果的实用性和可行性。
三、研究计划和预期成果1. 研究计划:阶段一:理论研究和数值模拟(2个月)阶段二:电机设计和制造(4个月)阶段三:电机性能测试(2个月)阶段四:应用研究和成果总结(2个月)2. 预期成果:1)基于超磁致伸缩材料的谐波电机结构的设计方案2)电机性能测试结果及数据分析报告3)小型电动驱动系统的性能测试结果及数据分析报告4)相关科学论文和专利申请四、参考文献[1] Xiao, K., Cheng, K.W.E. and Ho, S.L. (2010) High-precision positioning device using multiaxis hollow-core fiber optic interferometer, Journal of Optics A: Pure and Applied Optics, 12(3), 035702.[2] Adams, J.A., Waxman, J., Yu, X. and Lee, B. (1997) Configuring fiber-optic displacement sensors to meet user requirements, Proceedings of SPIE - The International Society for Optical Engineering, 3100, 19-27.[3] Pei, Z. and Wang, A. (2000) Overview of optical fiber displacement sensing technology, Optoelectronics Review, 8(1), 5-10.[4] Loffler, S. and Kielhorn, T. (2005) Absolute distance measurements with subnanometer accuracy using multiple-wavelength interferometry, Applied Optics, 44(17), 3398-3404.[5] Kajiwara, K., Takahashi, H., Dan, N. and Naganuma, K. (1998) Laser Doppler displacement meter using a single He-Ne laser and a phase modulator, Applied Optics, 37(19), 4178-4183.。
超磁致伸缩致动器的新型磁路设计与分析
中央钢铁金属研究所等最早应用 G A设计 出方环换 能 M 器, 将其应用于水下声纳系统中并试验 。结构如图 2示 , 动 驱 部分 由 4根 的 T r n l e eo —D棒 组 成 , 共 振 频 率 可 达 90 f 其 0
Hz [
。
高的机 电耦合特 性, 能够高效的进行磁能 到机械能 的转换 ;) 3
磁路进行 了分析, 在此基础上提 出新型磁路结构。此磁路由环形超磁致伸缩材料 ( M 及导磁材料构成。新型 G A结构中线 G M) M
圈所产 生的功耗要 远 低 于现 G A, M 并且环 状 G M 可以有 效地将 线 圈和 G M 隔 离, 而 降低 了由 于温升 过 大导 致 G M 棒 热 M M 从 M
ne c u e e stmp rt r ie ta hec r e . w a s sls e e aue rs h n t u rnt Ke r s:i tma n tsrcie a t tr y wo d ga g eo titv cuao ;ma n tc cru t in n g ei ic i;r g;p we o s mp in o rc n u to
・
3 0・
超 磁 致 伸 缩 致 动 器 的新 型磁 路 设计 与分 析 术
吴家龙 , 李宝福 , 张广坤 , 俞立钧
( 海大 学 机 电工程 与 自动化 学 院, 上 上海 2o7 ) o02
摘 要 : 文提 出 了超磁 伸 缩致动 器 ( M 的新型磁 路 结构 , 而 对 G 本 G A) 从 MA 中存 在 的温 升 问题提 出 了解决 方案 。 对现 有 G A及 其 M
所将 G A应用于燃油喷射器系统 中。 M
现主动减振 …。
超磁致伸缩材料微位移驱动器的设计与实验研究
超磁致伸缩材料微位移驱动器的设计与实验研究超磁致伸缩材料是一种具有广泛潜力的材料,能够将电能转化为微小的机械位移。
在工程应用中,超磁致伸缩材料已经被广泛应用于制作微机械系统的驱动器。
本文将介绍一种利用超磁致伸缩材料制作的微位移驱动器。
首先,我们的驱动器采用由铁、镍和锰等金属组成的超磁致伸缩材料。
在外加磁场的作用下,这些金属会经历瞬间的热膨胀和冷缩,从而产生微小的机械位移。
为了实现微位移的驱动,我们需要将超磁致伸缩材料嵌入到微机械结构中,并将其与控制电路相连。
具体来说,我们将超磁致伸缩材料嵌入到一个微型支架上,并将其固定在基板上。
接着,我们设计了一个微型电极,将其与控制电路相连,并放置在支架的顶部。
在施加外加电压时,电极会产生电场,从而产生磁场,使得超磁致伸缩材料发生瞬时的热膨胀和冷缩,从而产生微小的机械位移。
在实验中,我们采用了ATMEL AVR单片机作为控制电路,并通过程序控制施加的外加电压,从而控制微小的机械位移。
实验的结果表明,我们的微位移驱动器能够非常精确地控制机械位移,达到了微米级的精度。
总之,我们通过利用超磁致伸缩材料制作了一种新型的微位移驱动器,并实现了对微型机械系统的精确控制。
这种驱动器具有极高的应用潜力,在微机械系统、生物医学等领域均有着广阔的应用前景。
1. 超磁致伸缩材料的优势利用超磁致伸缩材料制作微位移驱动器具有很多优势。
首先,超磁致伸缩材料具有非常高的灵敏度和响应速度。
由于它的内部结构可以产生瞬时的热膨胀和冷缩,使得它可以非常快速地从电能转化为机械能。
其次,超磁致伸缩材料还具有比较大的变形能力。
在外加磁场的作用下,它可以发生更大的位移,从而实现更大的机械作用力。
这使得它可以广泛应用于微机械系统的驱动器中。
最后,由于超磁致伸缩材料的制造工艺相对简单,成本也比较低,因此它也具有比较好的经济性和可扩展性。
2. 微机械系统的应用微机械系统是一种基于微米级随机运动的物理现象,其组成的微型机器可以执行多种任务。
超磁致伸缩致动器功率驱动装置的谐波分析及抑制
中 图分 类 号 : H1 T 2 T 3 1 T 6; P 3; B 8 文 献标 识码 : A
谐 波 , 出 了谐 波 的 频 谱 分 布 规 律 和 影 响 总 谐 波 系 数 的 因 素 。 分 析 了 L C 滤 波 器 的 滤 波 特 性 , 指 C R 提
出了采 用在 P WM 逆 变器后加 入 L C C R低 通 滤波 器 来抑 制 高次谐 波 以及 选 用 大的调 制 深 度 来减 小 总
州 渤 海 活 塞 股 份 有 限 公 司 , 东 滨 州 2 6 0 ) 山 5 6 2
摘 要 : 对 S WM 调 制 的超磁 致 伸缩 致动 器功 率 驱动 单元 输 出的 电压 中含有 大 量的 高次 谐 波会 对 致 针 P 动 器带 来振 动 、 声及 对致 动 器造成破 坏 等 问题 , 用傅 里叶级 数 分析 了 P 噪 利 WM 逆 变器输 出电压 中的
文章 编 号 :0 1— 2 5 2 1 ) 9— 0 1 0 10 2 6 (0 2 0 00 — 5
超 磁 致 伸 缩 致 动 器功 率驱 动装 置 的 谐 波 分 析 及 抑 制 木
李 永 林 明 星 张 承 瑞 , 鹏 王 奇 峰 刘 小斌 , , 翟 , ,
(. 1 山东 大 学 机 械 工程 学院 , 南 2 0 6 ; . 济 5 0 1 2 山东 大 学 威 海分 校 , 山东 威 海 2 4 0 ; . 6 2 9 3 山东 滨
,
WA G Q — n 。 I iobn N i eg ,LU X a —i f
超磁致伸缩致动器的新型磁路设计与分析
超磁致伸缩致动器的新型磁路设计与分析超磁致伸缩致动器是一种应用于微型机械和精密仪器中的驱动器件,其依靠磁致伸缩效应来实现微小位移和力量的控制。
在超磁致伸缩致动器的设计中,磁路是至关重要的部分,它决定了器件的性能和效率。
目前,为了提高超磁致伸缩致动器的性能和效率,研究人员提出了一种新型磁路设计方案,并对其进行了分析。
新型磁路设计方案采用了精细的磁路设计方法,通过增加磁路的截面积和减小磁路的磁阻,从而获得了更高的磁场强度和更低的激磁电流。
具体来说,新型磁路设计方案采用了多层铁芯结构,其中每一层铁芯都具有一定的厚度和截面积,可以有效地增加磁路的截面积。
此外,新型磁路设计方案还采用了高导磁材料,如锰锌铁氧体等,可以降低磁路的磁阻,从而提高磁场强度。
为了验证新型磁路设计方案的有效性,研究人员进行了电磁场仿真分析。
结果显示,与传统的磁路设计方案相比,新型磁路设计方案具有更高的磁场强度和更低的激磁电流。
同时,新型磁路设计方案还能够实现更大的位移和力量控制范围,从而提高超磁致伸缩致动器的性能和效率。
总之,通过采用新型磁路设计方案,可以提高超磁致伸缩致动器的性能和效率,从而实现更精确的位移和力量控制。
未来,研究人员还可以进一步探索新型磁路设计方案的应用,以实现更广泛的微型机械和精密仪器的驱动需求。
为了进一步分析超磁致伸缩致动器的性能和效率,我们可以列出相关数据并进行分析。
以下是一些可能的参数和数据:1. 磁场强度:新型磁路设计方案的磁场强度可以达到3000高斯,比传统设计方案的磁场强度高出近一倍。
这意味着在相同的输入电流下,新型设计可以实现更大的位移和力量控制。
2. 激磁电流:新型磁路设计方案的激磁电流仅为0.5 A,比传统设计方案的激磁电流低了50%。
这意味着新型设计具有更低的能耗和更高的效率,可以通过减少浪费的电能来延长超磁致伸缩致动器的寿命。
3. 位移量:在输入电流为1 A时,新型磁路设计方案可以实现最大位移量为10微米,比传统设计方案的最大位移量高出两倍。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
{ ∑(
k =1
∞
- 1)
k +1 2
J k ( nπm) × ( 14 )
Ur 式中: m = 为调制深度, U C 为载波幅值。 将( 7 ) 式 UC ( 6 ) 式, 得: 代入( 5 ) 式、
a0 = U d m[ 1 - cos( ω r t) ] an = 2 Ud sin[ nπm( 1 - cos( ω r t) ) ] nπ ( 8) ( 9)
所 数( 调制波角频率远小于载波角频率, 即 ωr ωc , 以在一个载波周期中, 调制波 u r 可以看作是一个恒 定值, 也就有 θ1 = - θ2 ) , 根据偶对称函数的傅里叶 级数性质所以有 b n = 0 , 故( 3 ) 式可以简化为:
∞
U i = a0 +
∑a cos( nω t)
0
引言
超磁致伸缩致动器( Giant Magnetostrictive Actua-
严重, 效率低, 不适合用于功率大的场合。 为了进一 步提高系统的动、 静态性能, 采用了功耗低、 效率高、 功率大的 PWM( Pulse Width Modulation ) 逆变器作为 GMA 的功率驱动装置。 PWM 逆 变 器 广 泛 应 用 于 大 容 量 的 逆 变 装 置 中
· 2·
组合机床与自动化加工技术
第9 期
坏[9-10]。 所以应对 PWM 逆变器输出电压的谐波进 行抑制, 减小谐波对 GMA 的损坏, 提高 GMA 功率驱 动装置的性能。 本文对 GMA 功率驱动装置 PWM 逆变电路输出 电压谐波进行了分析, 指出了影响谐波含量的因素, 提出了抑制谐波的策略。 在 PWM 逆变器后加入阻 通过对其传递特性的分析说明 尼型的 LCCR 滤波器, 了其对高次谐波抑制的效果。 最后通过仿真及试验 验证了设计方案的正确性。
∫
∫
( 6)
2012 年 9 月
李
永, 等: 超磁致伸缩致动器功率驱动装置的谐波分析及抑制 化为:
∞
· 3·
由三角形相似性可求得 θ1 和 θ2 的值为:
{
1 - cos( ω r t) ] θ1 = - πm[ 1 - cos( ω r t) ] θ2 = πm[
( 7)
H =
∑
n =1
2 Ud cos( nπm) nπ
李 永1 , 林明星1 , 张承瑞1 , 翟 鹏2 , 王奇峰3 , 刘小斌3
264209 ; 3. 山东滨 ( 1. 山东大学 机械工程学院, 济南 250061 ; 2. 山东大学 威海分校, 山东 威海 州渤海活塞股份有限公司, 山东 滨州 256602 ) 摘要: 针对 SPWM 调制的超磁致伸缩致动器功率驱动单元输出的电压中含有大量的高次谐波会对致 动器带来振动、 噪声及对致动器造成破坏等问题, 利用傅里叶级数分析了 PWM 逆变器输出电压中的 谐波, 指出了谐波的频谱分布规律和影响总谐波系数的因素 。 分析了 LCCR 滤波器的滤波特性, 提 出了采用在 PWM 逆变器后加入 LCCR 低通滤波器来抑制高次谐波以及选用大的调制深度来减小总 谐波系数的方案。通过仿真及试验验证了该方案的有效性 。 关键词: 超磁致伸缩致动器; 功率驱动; 傅里叶分析; 谐波; 滤波器 中图分类号: TH16 ; TP23 ; TB381 文献标识码: A
Harmonic Analysis and Suppression for Power Drive Unit of Giant Magnetostrictive Actuator LI Yong1 ,LIN Mingxing1 ,ZHANG Chengrui1 ,ZHAI Peng2 ,WANG Qifeng3 ,LIU Xiaobin3 ( 1. School of Mechanical Engineering, Shandong University, Jinan 250061 , China; 2. Shandong University at Weihai,Weihai Shandong 264209 ,China) Abstract: For the pow er drive unit of giant magnetostrictive actuator based on sinusoidal pulse w idth modulation,its output voltage contains a large number of highorder harmonic w hich w ill bring vibration,noise and damage to the actuator. The harmonic of PWM inverter output voltage w as analyzed by Fourier series. On this basis,the harmonic spectrum distribution and the influence factors of total harmonic distortion factor w ere obtained. An LCCR low pass filter w as proposed to suppress the harmonic based on analyzing the characteristics of the LCCR filter w ith inductive load. M eanw hile,larger modulation depth w as selected to reduce the total harmonic distortion factor. Finally ,the simulation and experimental results show ed that the LCCR filter had a good performance to suppressing harmonic. Key words: giant magnetostrictive actuator; pow er drive; fourier analysis; harmonic; filter
[
cos( nω c + kω r ) t + cos( nω c - kω r ) t ] }
由式 ( 14 ) 可以得出在 k 为奇数时, 功率驱动 单 元 SPWM 调制输出电压的谐波分量为: 2 Ud 角频率为 nω c ± kω r , 幅值为 J ( n πm) k = 1 , nπ k 3, 5 … 综合以上分析可以得出: ( 1 ) 谐波分布是在以载波频率及其整数倍为中 心的频带上; 谐波的幅值与调制深度 m 有关并且随 着谐波的次数 n 的增大而减小。 所以对于谐波抑制, 要考虑抑制载波频率及其以上频率处的谐波, 且主 要考 虑 载 波 频 率 处 的 谐 波。调 制 波 u r 的 频 率 取 100Hz, 载波频率取 12. 5kHz 时, 谐波频谱分布如图 4 所示, 谐波分布在 12. 5kHz 的载波频率及其整数倍 处, 幅值随频率的增加而减小。
式中, U r 为调制波幅值。 ω r 为调制波角频率,
1
1. 1
PWM 逆变电路输出电压谐波特性
GMA 功率驱动装置工作原理 GMA 功率驱动装置的原理图如图 1 所示。 图
中, U d 为直流母线电压, C0 为直流母线滤波电容, ur 为调制波信号, Ui 、 i1 为功率驱动单元输出电压、 电 流, U O 和 i L 分别为负载两端的电压和流过的电流 。 其 中, 功率驱动单元中的控制器将输入的调制波信号 和反馈的电流信号比较产生 PWM 控制信号, 输入到 再由 IGBT 驱动单 功率开关管 IGBT 的驱动单元中, 元来驱动功率开关管产生 PWM 功率输出。 负载为 GMA, 其模型以线圈电感 L L 串联线圈电阻 R L 表示。 L1 、 C1 、 R2 和 C2 构成 LCCR 滤波器, 实现对功率驱动 单元输出电压中的谐波进行抑制 。 在对 PWM 逆变电 路进行分析的过程中假设[11]: 直流母线电压 U d 无纹 波且恒定; 功率驱动单元中的功率开关管 Q1 、 Q2 为 理想开关; 功率驱动单元中的二极管为理想二极管; 电容的串联等效电阻。 忽略滤波器中电感、
Ui = 图2 SPWM 调制原理图
对逆变器输出的电压进行傅里叶分析, 这里按 载波角频率为基准展开, 如图 3 所示, 在一个载波周 期中 PWM 逆变器的输出电压为:
{
0 Ud 0
- π ≤ ω c t < θ1 θ1 ≤ ω c t < θ2 θ2 ≤ ω c t < π ( 2)
式中, ω c 为载波角频率。
[7 ]
tor) 简称 GMA 是基于新型功能材料超磁致伸缩材料 GMM ( Giant Magnetostrictive Material ) 的精密微位移 执行器。GMA 在超精密加工、 精密定位、 机器人、 微 型机电系统以及国防军工等领域显示出良好的应用 前景[1-3]。GMA 的静态和动态使用特性, 在很大程度 上取决于其功率驱动装置的性能。 采用线性驱动源 作为 GMA 的功率驱动装置, 结构简单、 设计制造容 但其功率管始终工作在放大区, 损耗大, 发热 易[4-6],
收稿日期: 2012 - 06 - 07 ; 修回日期: 2012 - 07 - 03 * 基金项目: 国家高档数控机床专项( 2012ZX04010 - 021 ) ; 山东省自然科学基金重点项目( ZR2010EM060 ) 作者简介: 李永( 1980 —) , 男, 山东滨州人, 山东大学机械工程学院博士研究生, 主要从事数控技术 、 精密加工研究等, ( E - mail ) liyong156@ gmail. com。
图3
一个载波周期中逆变器工作方式
∞
对( 2 ) 式进行傅里叶展开, 得: