轮式自动机器人控制系统
一种果蔬轮式机器人计算机控制系统论文
一种果蔬轮式机器人计算机控制系统摘要:本文提出一种基于arm11处理器的轮式移动机器人控制系统的设计方案。
方案采用一款基于arm1176jzf-s核心,采用arm v6构架的处理器s3c6410作为核心控制器,并使用了windows ce6.0操作系统作为软件开发平台。
该系统利用socket函数库,采用基于tcp/ip网络的udp协议以及服务器/客户机的模式,在visual studio2005环境下开发了基于802.11b无线通信技术的远程控制软件系统。
由于windows ce6.0系统的安全性能的提高,不能像ce5.0系统那样直接在应用程序上操作io口,因此提出用流式驱动接口的方式对arm的硬件设备进行操作控制,并采用动态链接库的设计思路封装了控制底层硬件的驱动函数,以及采用动态加载驱动的方式,省去了把驱动加载到内核运行的麻烦。
关键词:轮式移动机器人 arm6410 windows ce6.0 udp无线通信流式驱动接口中图分类号:tp273 文献标识码:a1、引言当今时代,随着机器人技术的迅猛发展,各式各样的机器人广泛应用于工业、农林业、军事、医疗等领域。
在机器人领域,正经历着从产业用机器人时代向生活用机器人时代的转变。
进入21世纪,家庭机器人,护理型机器人、教育娱乐型机器人相继问世,并逐渐走入寻常百姓家[1]。
随着移动机器人技术的研究重点从面向特殊恶劣环境到面向一般环境的转变,轮式机器人正逐渐成为移动机器人技术研究的主要方向,并引起广泛关注[2]2、系统架构和功能分析机器人系统可以划分为硬件系统和软件系统两个部分。
硬件系统包括机器人实体、网络通信设备及用于运行机器人控制软件的pc 机等。
软件系统包括了运行在pc机上的上位机控制软件和安装在机器人嵌入式设备中的下位机控制软件。
上位机软件负责与用户进行交互,接收用户的命令然后经过通信网络发送给下位机软件。
下位机软件负责接收上位机发送过来的控制命令然后控制机器人的机械部件如电机等来完成机器人的动作。
《轮式移动机器人轨迹跟踪智能控制》范文
《轮式移动机器人轨迹跟踪智能控制》篇一一、引言随着科技的不断进步,轮式移动机器人在各个领域的应用越来越广泛,如工业自动化、军事侦察、服务机器人等。
在这些应用中,轨迹跟踪的准确性和智能性成为评价机器人性能的重要指标。
本文旨在研究轮式移动机器人轨迹跟踪的智能控制技术,探讨其应用与优势,并提出相应的解决方案。
二、轮式移动机器人概述轮式移动机器人是一种常见的移动机器人类型,具有结构简单、移动灵活、运动速度快等优点。
其运动主要依靠电机驱动的轮子实现。
根据不同的需求,轮式移动机器人可分为单轮驱动、双轮驱动等不同类型。
此外,其内部控制系统也是机器人正常运行的关键。
三、轨迹跟踪的挑战与需求轨迹跟踪是轮式移动机器人的核心功能之一。
然而,在实际应用中,轨迹跟踪面临诸多挑战。
如复杂的外部环境和内部分布式控制系统可能导致机器人轨迹偏离设定路线,使得任务无法准确完成。
因此,我们提出了一个高质量的轨迹跟踪智能控制方案,以解决这些问题。
四、智能控制方案的设计与实现为了实现准确的轨迹跟踪,我们采用了先进的传感器技术和机器学习算法。
首先,通过高精度的传感器实时获取机器人的位置和姿态信息。
然后,利用机器学习算法对数据进行处理和分析,以实现智能决策和控制。
具体来说,我们采用了以下步骤:1. 传感器数据采集:通过激光雷达、摄像头等传感器实时获取环境信息,包括障碍物位置、道路情况等。
2. 路径规划:根据获取的传感器数据,利用算法进行路径规划,为机器人制定合理的运动路线。
3. 反馈控制:将实际位置与目标轨迹进行比较,计算偏差并进行反馈控制,调整电机的输出力矩以使机器人回到正确的轨迹上。
4. 机器学习:利用深度学习等算法对历史数据进行学习,以提高轨迹跟踪的准确性和鲁棒性。
五、实验结果与分析为了验证我们的智能控制方案的有效性,我们在不同环境下进行了实验。
实验结果表明,我们的方案在各种复杂环境下均能实现准确的轨迹跟踪。
此外,我们还对不同算法进行了对比分析,发现我们的方案在准确性和鲁棒性方面均具有显著优势。
轮式机器人跟踪控制

02
轮式机器人跟踪控制系统
跟踪控制系统概述
跟踪控制系统的定义
跟踪控制系统的组成
跟踪控制系统是一种能够使轮式机器 人跟随参考轨迹运动的控制系统。它 通过调节轮式机器人的运动,使其在 位置、速度和加速度等参数上跟踪参 考轨迹,达到精确控制的目的。
跟踪控制系统通常由控制器、传感器 和执行器组成。控制器负责根据传感 器检测到的机器人和参考轨迹的误差 ,计算出控制指令。执行器根据控制 指令调节机器人的运动。传感器则实 时监测机器人的运动状态,为控制器 提供反馈信息。
06
参考文献
参考文献
研究背景
01
介绍轮式机器人跟踪控制的研究背景和意义。
研究现状
02
综述轮式机器人跟踪控制的国内外研究现状、发展趋势和存在
的问题。
研究内容
03
详细阐述轮式机器人跟踪控制的研究内容,包括系统结构、运
动学模型、控制算法等。
感谢您的观看
THANKS
05
总结与展望
研究成果总结
精确性
轮式机器人跟踪控制的研究成果在精确性方面有显著提高,采用了 先进的控制算法和传感器技术,使机器人能够更准确地跟踪目标。
适应性
现有的研究工作还提高了轮式机器人跟踪控制的适应性,使其能够 适应不同的环境条件和任务需求。
实时性
研究成果在实时性方面也有所改进,采用了高效的计算和控制方法, 使机器人能够更快地响应指令和跟踪目标。
轮式机器人跟踪控制
2023-11-09
contents
目录
• 轮式机器人概述 • 轮式机器人跟踪控制系统 • 轮式机器人跟踪控制算法 • 轮式机器人实验平台与实验结果 • 总结与展望 • 参考文献
基于自抗扰的双轮自平衡机器人运动控制系统设计
基于自抗扰的双轮自平衡机器人运动控制系统设计摘要:本文详细的阐述自抗扰控制的组成与原理,并应用到双轮自平衡机器人的运动控制中。
根据双轮自平衡机器人的运控控制规律,对控制系统结构进行了总体设计。
提出了速度-倾角串级自抗扰控制器,解决了双轮自平衡机器人速度和直立平衡控制之间的强耦合问题,并且提高了系统的抗扰能力。
将自抗扰控制应用到转向控制中,提出了一种PID-自抗扰串级控制器,改善了双轮自平衡机器人转向控制的快速性。
实验表明,提出的基于自抗扰控制的运动控制系统有较好的动态性能和抗扰能力。
关键词:动力学模型;自抗扰控制;双轮自平衡机器人;串级控制器中图分类号:TP272 文献标志码:A 文章编号:Design of Motion Control System for Two-wheeled Self-balancing Robot Based on Active Disturbance Rejection ControlBAO Zhen-ming1,TANG Ming-hui2,ZHANG Fu-qiang2, YANG Peng-shuai2,WANG-qi21(School of Energy and Power Engineering, Jiangsu University of Science & Technology, Zhenjiang, 212003, Jiangsu, China)2(School of Electromechanical and Power Engineering, Jiangsu University of Science and Technology at Zhangjiagang, Zhangjiagang, 215600, Jiangsu, China)Abstract: The motion control of two-wheeled self-balancing robot (TWSR) based on active disturbance rejection control (ADRC) is introduced. The overall structure of the control system is designedaccording to the control law of the TWSR. The composition andprinciple of the ADRC are elaborated and applied to the motion control of the TWSR. A speed-angle cascade controller based on ADRC is proposed, which solves the problem of strong coupling between thespeed and the balance control, and improves the anti-interferenceability of the system. The ADRC is also applied to the steering control. To improve the response speed of the TWSR’s steering control, a PID-ADRC cascade controller is proposed. The Experiment shows thatthe proposed motion control system based on ADRC has better dynamic performance and anti-interference ability.Key words: dynamics model; active disturbance rejection control (ADRC); two-wheeled self-balancing robot; cascade controller0引言在国内外对机器人的研究中,轮式移动机器人是最热门的研究方向之一。
轮式移动机器人直流伺服控制系统设计

本 论文研 究一 直 流伺 服 系统 , 系 统 的控 制 对 该 象 为直 流伺服 电机 , 载为 机 器 人本 体 。通过 给 定 负
信 号来 控制直 流伺 服 电机 的输 出 , 由直 流伺 服 电机
工作 原理 是 建 立 在 电磁 定 律 基 础 上 的。与 电磁 转
带动负载( 机器人本体) 实现各种期望 的动作。
⑥
2 1 SiT c. nr. 0 2 c. eh E gg
计 算机技术
轮 式 移 动机 器 人 直 流 伺服 控 制 系统设 计
温 箐 笛
( 贵州财经大学信息学 院 , 阳 5 00 ) 贵 50 4
摘
要 随着移 动机器 人性能 的不 断完善 , 动机 器人 的应用 范 围正在 不断扩 展 , 步进 入 到工 业、 移 逐 军事 、 务、 育 等领 服 教
矩相关 的是 相 互 独 立 的 两个 变 量 主 磁 通 和 电枢 电
流 , 们分 别 控 制 着 励 磁 电流 和 电枢 电 流 , 以方 它 可 便地进 行 转 矩 与 转 速 控 制 。另 一 方 面 从 控 制 角 度
来看 , 直流 伺 服 的控 制 是 一 个 单 输 入/ 出 的单 变 输 量控制 系统 , 经典 控制 理 论 可 以完 全 适 用 于 这种 系
机、 机器人运 动学和动力学。介 绍 了移动机器人运 动系统 , 以及本 设计 中的典 型 I型 系统 。对 系统 进行 静动 态分析 , 计 设
了一轮 式移动机 器人直流 伺服 系统 , 整定控制器参 数。最后通 过仿 真给 出系统 的响 应结果 , 行分 析 , 进 结果 满足 移动机 器
人 的基 本 要 求 。
’
轮式移动机器人控制系统设计
轮式移动机器人控制系统设计轮式移动机器人控制系统设计一、引言随着科技的不断进步和机器人技术的快速发展,移动机器人已经广泛应用于工业、军事、医疗等领域。
轮式移动机器人由于其稳定性和灵活性被广泛应用,因此其控制系统的设计显得尤为重要。
本文将探讨轮式移动机器人控制系统的设计原则、结构和实现方法。
二、轮式移动机器人的基本机构轮式移动机器人一般由底盘、轮子、传感器和控制器组成。
底盘是机器人的主要支撑结构,承载其他各部件,并在其上装载各种设备。
轮子是机器人行进和转向的关键组件,具有较大的摩擦力和承载能力。
传感器可以获取环境信息,并将其转化为电信号传输给控制器。
控制器根据传感器信息和预设的任务要求来实时控制机器人的行为。
三、轮式移动机器人控制系统设计原则1. 清晰明确的任务目标:在进行轮式移动机器人控制系统设计之前,首先要明确机器人的任务目标。
基于任务目标,确定机器人的控制策略和参数,以便更好地实现任务需求。
2. 稳定性和可靠性:轮式移动机器人需要在各种复杂环境下进行工作,因此其控制系统必须具备较好的稳定性和可靠性,以应对各种不确定性因素的干扰。
3. 灵活性和适应性:轮式移动机器人具有灵活的机动性和适应能力,因此其控制系统应具备较高的灵活性,能够根据环境变化和任务需要做出相应的调整。
4. 实时性:由于轮式移动机器人需要实时地感知环境并做出响应,因此控制系统设计中的算法和通讯机制要具备较高的实时性,以确保机器人的快速响应能力。
5. 省电性:由于移动机器人工作时往往需要依靠电池供电,而电池续航能力有限,因此控制系统设计中要尽量优化能源消耗,提高电池利用率,延长机器人工作时间。
四、轮式移动机器人控制系统结构轮式移动机器人的控制系统一般采用层次化的结构,包括感知层、决策层和执行层。
1. 感知层:感知层是轮式移动机器人控制系统的底层,负责感知环境信息。
常用的感知装置包括激光雷达、摄像头、红外传感器等。
感知层通过采集环境信息并对其进行处理,将处理后的信息传递给决策层。
一种轮式移动机器人运动控制系统的实现
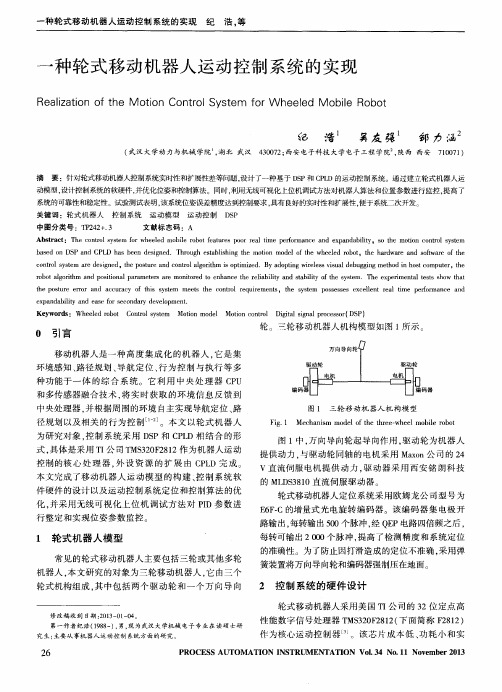
Ab s t r a c t :T h e c o n t r o l s y s t e m f o r wh e e l e d mo b i l e r o b o t f e a t u r e s p o o r r e a l t i me p e r f o r ma n c e a n d e x p a n d a b i l i t y,s o t h e mo t i o n c o n t r o l s y s t e m
纪 浩
轮式移动机器人运动控制系统研究与设计的开题报告
轮式移动机器人运动控制系统研究与设计的开题报告一、选题背景随着现代科技的不断发展,机器人技术的应用日益广泛,尤其是在工业自动化领域。
现代工厂中很多重复性劳动已经被机器人所取代,这不仅提高了生产效率和产品质量,也减轻了人力成本和劳动强度。
其中轮式移动机器人在物流和仓储领域有广泛应用,能以更快的速度和更高的精度完成货物搬运和种类分拣等任务,大大提升了物流效率。
机器人在实际应用中需要运动控制系统的支持,而轮式移动机器人的运动控制系统是整个机器人系统中至关重要的一部分,它直接关系到机器人的移动速度、精度以及灵活性等。
因此,本课题旨在针对轮式移动机器人运动控制系统进行详细的研究和设计,探索更为高效、稳定的控制策略。
二、选题意义及目标本课题旨在研究和设计一种高效、稳定的轮式移动机器人运动控制系统,通过建立运动模型、分析控制策略、设计控制算法等方面的研究工作,达到以下目标:1. 实现轮式移动机器人的运动控制系统,包括传感器采集、运动控制、路径规划等。
2. 基于机器人运动模型,探索一种高效、精准的控制策略。
3. 根据控制策略,设计控制算法,并使用实验方法验证算法的有效性和鲁棒性。
4. 实现算法在轮式移动机器人控制系统中的应用,提升机器人的控制性能和稳定性。
三、研究内容和计划1. 研究轮式移动机器人的运动学和动力学原理,建立数学模型。
2. 研究机器人传感器的类型和工作原理,选择合适的传感器并编写相应的驱动程序。
3. 建立机器人控制系统的运动模型,包括路径规划、局部化等。
4. 基于机器人运动模型,研究控制策略,优化机器人运动性能。
5. 设计并实现控制算法,对算法进行验证实验。
6. 将控制算法应用到轮式移动机器人控制系统中,测试系统的性能和稳定性。
7. 撰写毕业论文并进行答辩。
四、研究方法和技术路线本课题的研究方法主要包括:文献研究法、建模法、仿真实验法和实物实验法等。
具体的技术路线如下:1. 通过文献研究法了解轮式移动机器人的基本原理、运动学、动力学等知识,并进行数据收集和分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轮式自动机器人控制系统
引言
自主移动机器人是指具有行动决策和规划,以及自动执行能力,集人工智能、智能控制、信息处理、检测与转换等专业技术为一体的系统。
一般移动机器人都是基于行为的,机器人只有到达指定位置才开始执行其他动作,因此导航和定位是移动机器人研究的重要问题。
本文采用陀螺仪和光电编码器的惯性导航方式,并且采用LPC2478构建整个控制系统,并在一台机器人上得以实现。
本设计的轮式自动机器人的控制系统主要分为主控模块、传感器采集模块、运动控制模块、执行动作控制模块和人机交互模块五个部分。
传感器采集处理模块主要采集陀螺仪和编码器的信息并作初步的处理,构成机器人的感知单元,相当于机器人的五官。
主控模块是机器人的智能单元,对采集到的外部信息进行分析处理并做出决策,相当于机器人的大脑。
运动控制模块和执行动作控制模块是机器人的执行单元,相当于机器人的四肢。
人机交互模块完成人对机器人的设置,并且能够显示机器人的运行状态,是人和机器人之间的桥梁。
硬件系统
硬件系统在设计时采用模块化的思想,为了提高系统的处理速度和并行工作能力,整个系统采用了一个包含多个处理器的可以并行工作的高效系统。
每个模块都拥有独立的处理器使得整个系统很容易根据具体应用进行裁剪和扩展。
整个硬件系统组成如主控模块
主控模块是整个机器人控制系统的核心,集中控制系统的其他模块。
主。