高精度激光雷达转台结构设计与装配方法
初探大阵面雷达天线高精度装配技术

初探大阵面雷达天线高精度装配技术摘要:随着雷达系统的增长,光纤数据网络也越来越复杂。
根据实际情况思考输电网的优化设计在工程实践中势在必行。
最终在成本、可靠性、产品质量等方面寻求最佳平衡。
本文对大阵面雷达天线高精度装配技术进行分析,以供参考。
关键词:大阵面雷达;天线阵面;装配技术引言随着操作环境越来越复杂,RCS的检测目的越来越少,对雷达的功率孔径积累、动态范围等也提出了更高的要求。
数字阵列雷达将数字技术与雷达阵列技术完美结合,在发射模式和接收模式下,用数字波束形成(DBF)取代传统的模拟波束形成(ABF)。
数字阵列雷达动态范围广,多径、制造型、系统工作可靠性高。
大星阵列数字摄影雷达以卫星为观测平台,不受视线限制,可以探测更远更小的RCS目标,在探测隐身目标等方面具有重要的应用价值。
1装配技术研究1.1确定基准平面具体使用雷达设备时,将进行一次基于雷达设备的有针对性的测量值测试,在第一种情况下,将安装在雷达设备上作为基础。
但雷达是一种机架,其设备平台是雷达设备所在的大型飞机,安装在较大的设备设施中,安装了多个固定孔,安装过程复杂,需要多人同时操作,现有安装设备不能满足使用要求。
此外,车轮的整体设计要求天线阵列必须安装在地面上,才能与设备平台一起安装。
因此,设备平台不能直接用作基础。
雷达站通过螺栓联接安装到天线架上,将天线架下的四个紧固管与紧固孔固定在一起。
对天线骨架进行全局分析后发现,虽然天线骨架的顶部和底部安装面不能用作扭曲的基础,但天线框架下的四个安装面并未变形,因此可以创建基座。
基准是水平基准和垂直基准。
水平基座是与雷达设备平行的平面,垂直于雷达设备平面。
因此,可以通过装配孔末端的中心来创建水平平面。
同时,为孔的前侧和后侧的中心点创建线束段,以确定中心点并将两个中心点连接为垂直基础。
1.2仪器测量在选择基准时,安装天线元件时,需要使用仪器来建立基准平面,以测量垂直和水平度、平面等。
仪器的测量精度决定了试验的精度,天线阵列的设计精度为10度,仪器的测量精度低于0.1mm。
激光雷达模组结构

激光雷达模组结构
激光雷达模组结构是一项关键的技术,用于实现高精度、高分辨率的远距离测量和感知。
它的设计和构造非常精密,由多个核心组件组成,以确保其正常运行和准确性。
激光雷达模组的核心部件是激光发射器和接收器。
激光发射器通过产生激光束,将其发送到目标物体上。
激光束经过反射后,被接收器接收并转化为电信号。
激光发射器和接收器通常采用高功率的半导体激光器和高灵敏度的光电二极管。
为了确保激光束的稳定性和精度,激光雷达模组还配备了光学元件,如透镜和滤光片。
透镜用于聚焦激光束,使其具有较小的发散角度和较高的光功率密度。
滤光片则用于滤除不需要的光线,以提高激光雷达对目标物体的探测精度。
另一个重要的组件是扫描机构。
它由一个或多个旋转平台组成,用于控制激光束的方向和扫描范围。
通过旋转平台的运动,激光雷达模组可以扫描整个水平和垂直方向,实现全方位的测量。
扫描机构通常由精密的电机和传感器控制,以确保扫描的准确性和平稳性。
为了提高激光雷达的性能,还可以加入其他辅助组件。
例如,温度传感器和湿度传感器可以监测环境条件,并对激光雷达的输出进行校正。
此外,功率放大器和滤波器可以增强信号的强度和质量,提高激光雷达的探测能力和抗干扰性。
总体而言,激光雷达模组的结构是一个高度复杂且精密的系统。
各个组件的协同工作,使得激光雷达能够实现高精度、高分辨率的测量和感知。
这项技术的应用范围非常广泛,包括自动驾驶、机器人导航、环境监测等领域。
激光雷达模组的设计和优化将继续推动这些领域的发展,并为人类创造更加智能和便利的生活。
高层建筑物激光雷达监测系统施工方案
高层建筑物激光雷达监测系统施工方案一、背景介绍随着城市的快速发展和人们对舒适居住环境的追求,高层建筑的数量快速增加。
然而,高层建筑物的稳定性和结构安全一直是人们关注的焦点。
为了确保高层建筑物的结构安全,激光雷达监测系统应运而生。
本文将详细介绍高层建筑物激光雷达监测系统的施工方案。
二、方案原理高层建筑物激光雷达监测系统主要通过激光束在建筑物表面形成网格,并利用激光测距仪实时获取建筑物表面的形变信息。
通过与事先设定的基准值进行对比,可以及时发现建筑物的位移变化、松动或倾斜等异常情况。
同时,系统还可以通过数据采集和分析,提供结构变形趋势的预测,为高层建筑物的维护和管理提供重要参考。
三、系统组成高层建筑物激光雷达监测系统主要包括以下几个组成部分:1. 激光发射器:负责发射激光束,将建筑物表面形成规则的网格。
2. 激光测距仪:通过测量激光束与建筑物表面的反射距离,获取建筑物形变信息。
3. 数据采集设备:负责接收和处理激光雷达系统获取的数据,并将其转化为可视化的结构变形信息。
4. 数据分析软件:对采集到的数据进行分析和处理,提供结构变形趋势的预测。
5. 报警系统:当发现建筑物出现异常变形时,及时发出报警信号,提醒相关人员采取必要的措施。
四、施工流程高层建筑物激光雷达监测系统的施工流程主要包括以下几个步骤:1. 规划设计:根据建筑物的结构形式和监测要求,确定激光雷达监测系统的布置方案和参数设置。
2. 安装设备:按照设计方案,在合适的位置安装激光发射器、激光测距仪和数据采集设备,并进行相关的连接和调试工作。
3. 配置软件:根据建筑物的结构特点,配置相应的数据分析软件,并校准监测系统的基准值。
4. 系统测试:对安装完毕的激光雷达监测系统进行测试,确保其正常工作和准确测量建筑物的形变信息。
5. 系统调试:根据实际监测情况,对系统的参数进行调整和优化,以提高监测效果和准确度。
6. 运行监测:系统正常运行后,需要进行定期的数据采集和分析,及时发现潜在的结构变形风险,并进行预警和维护工作。
车载高精度搜跟一体三轴转台结构设计与分析
专题握腐车载高精度搜跟一体三轴转台结构设计与分析□黄晓英口梁文宏口王洪喜西安工业大学机电工程学院西安710024摘要:为解决无人机等低空飞行设备在公共场所中的安全隐患问题,采用双方位加俯仰的结构形式,设计了一种便携式车载高精度小目标搜跟一体三轴转台。
在保证精度指标的基础上,建立这一车载高精度搜跟一体三轴转台的三维实体模型,运用有限元数值方法对三维实体模型进行静力学分析,确认结构强度和刚度均满足设计要求。
对这一车载高精度搜跟一体三轴转台进行模态分析,得到前6阶模态的固有频率和振型,并进行随机振动响应分析。
分析结果表明,这一车载高精度搜跟一体三轴转台的结构设计合理,满足使用要求。
关键词:搜索跟踪转台结构设计分析中图分类号:TH122文献标志码:A文章编号:1000-4998(2021)03-0009-05Abstract:In order to solve the potential safety hazards of low~altitude flying equipment such as unmanned aerial vehicle in public places,a portable vehicle-mounted high-precision small target search/track integrated three-axis turntable was designed with a dual-o rientation plus pitching structural configuration.On the basis of ensuring the accuracy indicator,a three-dimensional solid model of this vehicle-mounted high-precision search/t rack integrated three-axis turntable was established,and the three-d imensional solid model was statically analyzed using finite element numerical method to confirm that the structural strength and rigidity meet the design requirements.The modal analysis was performed on this vehicle-mounted high-precision search/track integrated three-axis turntable,and the natural frequencies and vibration modes of the first6 order modes ware obtained,and random vibration response analysis was performed.The analysis results show that the structural design of this vehicle-mounted high-precision search/track integrated three-axis turntableis reasonable and meets the operating requirements.Keywords:Search Track Turntable Structure Design Analyses1设计背景随着航空航天技术、微电子技术、信息技术等的发展,无人机在航拍、救援、侦察等领域发挥着越来越重要的作用。
某机载雷达伺服转台结构设计
第8期2018年4月No.8April,2018无论在和平时代,在本国国土领域内,获取可疑活动目标信息,保障领土领空领海安全;还是在战争时期,获知敌情,进行火力打击,搜索雷达装备是必不可少的国防利器。
相对于地面雷达系统,机载搜索雷达具有灵活机动、快速进出战场等优势,其作用越来越明显。
然而恶劣的使用环境也限制了机载搜索雷达的发展。
针对机载雷达所处的复杂热环境、力学环境以及电磁环境,本文在有限的空间和重量下,通过合理布局、润滑密封设计、力学仿真分析设计出满足要求的伺服转台。
以下就雷达伺服转台结构设计、驱动力矩计算、力学仿真分析进行详细论述。
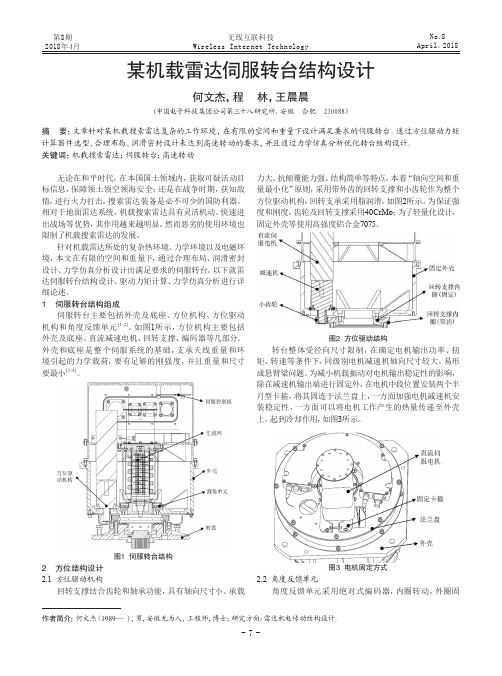
1 伺服转台结构组成伺服转台主要包括外壳及底座、方位机构、方位驱动机构和角度反馈单元[1-2]。
如图1所示,方位机构主要包括外壳及底座、直流减速电机、回转支撑、编码器等几部分。
外壳和底座是整个伺服系统的基础,支承天线重量和环境引起的力学载荷,要有足够的刚强度,并且重量和尺寸要最小[3-4]。
图1 伺服转台结构2 方位结构设计2.1 方位驱动机构回转支撑结合齿轮和轴承功能,具有轴向尺寸小、承载力大、抗倾覆能力强、结构简单等特点,本着“轴向空间和重量最小化”原则,采用带外齿的回转支撑和小齿轮作为整个方位驱动机构,回转支承采用脂润滑,如图2所示。
为保证强度和刚度,齿轮及回转支撑采用40CrMo;为了轻量化设计,固定外壳等使用高强度铝合金7075。
图2 方位驱动结构转台整体受径向尺寸限制,在确定电机输出功率、扭矩、转速等条件下,同级别电机减速机轴向尺寸较大,易形成悬臂梁问题。
为减小机载振动对电机输出稳定性的影响,除在减速机输出端进行固定外,在电机中段位置安装两个半月型卡箍,将其固连于法兰盘上,一方面加强电机减速机安装稳定性,一方面可以将电机工作产生的热量传递至外壳上,起到冷却作用,如图3所示。
图3 电机固定方式2.2 角度反馈单元角度反馈单元采用绝对式编码器,内圈转动,外圈固作者简介:何文杰(1989—),男,安徽无为人,工程师,博士;研究方向:雷达机电传动结构设计。
雷达模块结构高效设计方法探索
雷达模块结构高效设计方法探索雷达模块结构高效设计方法探索随着科学技术的不断发展,雷达技术被广泛应用于军事、民用、科研等领域。
雷达模块是雷达的重要组成部分,其中,结构设计的高效性直接影响到雷达性能的发挥和数据的准确性,因此,雷达模块结构的高效设计方法探索是当今科技领域的一个重要课题。
1. 雷达模块结构的基本组成雷达模块结构大致由发射部分、接收部分和信号处理部分组成。
其中,发射部分负责发射信号,接收部分负责接收信号,信号处理部分负责对接收的信号进行处理和分析,获取目标信息并进行目标跟踪。
在具体实现时,雷达模块结构除了以上三部分还会考虑如下工作:(1)天线数组结构设计:天线阵列是雷达系统中,由多个单元阵列组成的一个二维或三维系统。
天线阵列的结构对于雷达系统的性能起到至关重要的作用。
高效的天线结构能够有效地增大雷达系统的描述范围,加强抗干扰能力,提高雷达系统的探测和定位能力。
(2)低噪声前置放大器设计:前置放大器是接收机重要的前端信号处理部分。
对于雷达系统而言,前置放大器必须具备低噪声、高增益、高线性等特性。
通常情况下采用共源极型式的高电平前置放大器。
它通过对信号进行放大,补偿传输损失以及增益控制等功能,为接下来的信号处理提供重要的支持。
(3)信号处理算法设计:信号处理算法是雷达系统实现目标跟踪和目标信息提取的关键技术。
常用的信号处理算法有最大似然估计算法、卡尔曼滤波算法和最小二乘法等。
这些算法能够根据接收到的信号,对目标的位置、方向、速度等参数进行估计和预测,从而实现对目标的跟踪。
2. 雷达模块结构设计的高效方法(1)结构优化设计结构优化设计是针对雷达模块当中的每个部分,利用虚拟样机进行优化,以达到对整个雷达结构的优化效果。
常见的结构优化方法包括有限元分析法、模拟退火算法和遗传算法等。
通过这些方法,优化出来的雷达模块结构可以有效地减少结构重量、提高结构刚度等。
(2)系统仿真设计系统仿真方法是针对雷达模块结构整体,进行仿真验证的方法。
激光雷达拆装与检修流程
激光雷达拆装与检修流程英文回答:Lidar, short for Light Detection and Ranging, is a remote sensing technology that uses laser beams to measure distances and create detailed maps of the environment. Itis widely used in various fields, including autonomous vehicles, robotics, and surveying. As with any complex technology, lidar systems may require disassembly and maintenance at some point. In this article, I will discuss the process of disassembling, repairing, and reassembling a lidar system.Firstly, before starting the disassembly process, it is crucial to ensure safety precautions are in place. This includes wearing protective gear such as gloves and safety glasses to prevent injuries. Additionally, it is important to disconnect the power supply to avoid any electrical hazards.Next, the lidar system should be carefully disassembled step by step. This involves removing any external components such as the protective casing or mounting brackets. It is essential to keep track of the removed parts and organize them properly to avoid confusion during reassembly.Once the external components are removed, attention should be focused on the internal components of the lidar system. This may include the laser emitter, receiver, scanning mechanism, and control circuitry. Each component should be handled with care and inspected for any signs of damage or wear. If any faulty components are identified, they may need to be replaced or repaired.After the inspection, the lidar system can be repaired if necessary. This may involve fixing any damaged wiring, replacing faulty components, or recalibrating the system.It is important to follow the manufacturer's instructions or consult technical documentation during the repair process to ensure proper procedures are followed.Once the necessary repairs are completed, the lidar system can be reassembled. This involves reversing the disassembly steps and carefully reconnecting the components. It is crucial to ensure that all connections are secure and properly aligned. Any screws or fasteners should be tightened to the appropriate torque specifications.Finally, after reassembly, the lidar system should be tested to ensure it is functioning correctly. This may involve performing calibration procedures or running diagnostic tests. If any issues are identified during the testing phase, further adjustments or repairs may be required.中文回答:激光雷达,简称为Lidar(Light Detection and Ranging),是一种远程感知技术,利用激光束测量距离并创建环境的详细地图。
转台设计指导书

我们为您定制个性化转台,满足您一切需求
购买转台请发E-mail:wangyi#(#换成@)
第1章 转台总体设计
1.1 转台结构类型选择
转台是一种重要的地面测试设备,用于惯性导航系统和惯性元件检定、标定,以及模拟 飞行器姿态运动。 转台根据用途可分为仿真转台和惯性测试转台。但目前两个类别间互相渗透的趋势愈发 显著, 界限日趋上移,直到中高端产品才区别明显。 惯性测试转台,侧重静态或稳态性能,主要用于惯性导航系统和惯性元件如陀螺、加速 度计的性能检测和标定。先进武器系统一般配备有惯性导航和制导系统, 这类装置在生产、 调试、测评、使用、维护(修)等各个阶段都离不开由惯性测试转台组成的测试系统。因此, 惯 性测试性能的好坏, 直接影响武器系统研制水平及其性能评定。 仿真转台,侧重动态性能,仿真转台一般用于武器平台或运动载体的运动状态模拟 , 是 各类武器平台进行半实物仿真试验等地面综合性试验系统的关键设备和重要组成部分, 也是 测试、评价和标定各类运动载体、武器系统性能的经济、高效的技术手段。 转台按照不同的分类标准有多种类型。
购买转台请发E-mail:wangyi#(#换成@)
转台设计 课程设计指导书
哈尔滨工业大学
2011 年 4 月
我们为您定制个性化转台gyi#(#换成@)
目 录
第 1 章 转台总体设计 ....................................................................................................................... 1 1.1 转台结构类型选择 ................................................................................................................... 1 1.1.1 按机械台体结构分类......................................................................................................... 1 1.1.2 按转台回转轴数量分类..................................................................................................... 2 1.1.3 按转台驱动元件类型分类................................................................................................. 5 1.1.4 按转台轴承分类................................................................................................................. 5 1.2 转台驱动元件选择 ................................................................................................................... 6 1.3 转台测量元件选择 ................................................................................................................... 7 第 2 章 转台机械结构设计 ............................................................................................................... 8 2.1 轴系设计 ................................................................................................................................... 8 2.1.1 轴承选择与固定................................................................................................................. 9 2.1.2 轴承的安装与预紧........................................................................................................... 10 2.2 轴与框架的连接 ..................................................................................................................... 10 2.2.1 胀紧套尺寸选择............................................................................................................... 12 2.2.2 胀紧套安装拆卸与防护................................................................................................... 14 2.2.3 胀紧套结合面的配合....................................................................................................... 14 2.3 框架设计 ................................................................................................................................. 14 2.4 配重设计 ................................................................................................................................. 17 2.5 限位与锁紧装置设计 ............................................................................................................. 17 第 3 章 转台驱动元件设计 ............................................................................................................. 19 3.1 传动部件设计 ......................................................................................................................... 19 3.2 转动惯量计算 ......................................................................................................................... 19 3.3 电机力矩计算 ......................................................................................................................... 21 第 4 章 转台测量元件设计 ............................................................................................................. 24 4.1 角度传感器设计 ..................................................................................................................... 24 4.1.1 旋转变压器....................................................................................................................... 24 4.1.2 感应同步器....................................................................................................................... 26 4.1.3 光电码盘........................................................................................................................... 27 4.2 角速度传感器设计 ................................................................................................................. 28 4.3 限位开关设计 ......................................................................................................................... 30 4.4 走线与滑环 ..................................................................................................................... 31
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高精度激光雷达转台结构设计与装配方
法
摘要:转台是一种高精度的设备,是惯导测试与标定系统、雷达伺服控制系统和通信望远镜控制系统的关键组成部分,其性能直接影响控制系统的控制性能指标。
而先进的控制方法是实现转台精确位置控制的重要途径。
因此,针对高精度转台控制方法的研究对国防事业和经济民生的发展有着十分重要的理论意义和工程应用价值。
关键词:高精度;激光雷达;转台结构设计;装配方法
前言
在雷达伺服系统中,转台是雷达的结构和功能实现中最重要的一部分。
转台机构的制造工艺及控制器的设计水平决定了雷达整体的精度、可靠性以及制作成本和研发周期。
而不同的应用环境也对转台的性能提出了不同的要求,星载雷达在太空易受到空间碎片碰撞及带电粒子辐射,因此需要其具有较高的容错性及复杂环境适应能力。
转台对惯性导航与制导系统、雷达伺服系统、量子通信望远镜等的性能测试、实验研究都有重要作用,转台的精度会决定被测系统的精度和实验研究结果。
随着惯性元件精度的提高以及许多设备对伺服控制系统的性能要求越来越严苛,转台的精度也必须随之提高,如果想得到更高精度的转台,就必须从单轴转台的研究入手,而先进的、智能化的控制策略是转台系统精确性的重要保证,所以在我国开展转台位置控制方法的研究有极其重要的意义。
1激光雷达概述
激光雷达是以激光为载频,通过发射调光信号,再对从目标反射回来的信号解调来获取所需目标信息的雷达。
与微波雷达相比,激光雷达在分辨率和抗电磁干扰等方面具有明显优势,不仅测距、测角和测速精度高,而且具有高分辨率三维成像能力,其性能特点和功能优势决定了它在军民品中的重要地位和作用。
作为卫
星的有效载荷,星载激光雷达转台设计制造难度极大,其结构设计对设备能否经受
卫星发射过程中恶劣的力学环境及太空环境中各种因素的影响,能否保证激光雷
达正常工作至关重要。
2高精度激光雷达伺服转台设计要求
激光雷达用双轴转台主要用于仪器样机激光雷达主要机械台体结构;球坐标
测量系统提供角度测量值;实现出射激光的空间定位和扫描。
要求设备具有高精
密轴系结构设计与加工,高精度大直径圆光栅角度编码器,高精度高稳定性的伺
服控制系统、快速数据通讯传输系统。
转台具有以下特点:转台台体结构紧凑,
尺寸尽量小,采用U-T结构;水平轴上需安装光路反射镜,反射镜尺寸为
100mm×70mm矩形反射镜并且可微调;垂直轴需留有通光孔直径≥Φ70mm,用以
安装直径Φ70mm光学镜头和通光路;平轴、垂直轴旋转可带动光路反射镜姿转
动实现测量激光的空间定位;转台有良好的静态定位稳定性,定位稳定时转台无
抖动;双轴均可连续旋转;单轴倾角回转精度:≤±1″。
3伺服转台总体结构设计
根据某伺服转台设计指标要求如下:(1)负载重量25kg;(2)转动范围0°~360°连续旋转;(3)指向精度≤0.03°;(4)自重≤20kg;(5)具备
直流电滑环、低频信号汇流环;(6)伺服转台运行出现异常时,能够隔离故障,并报告上位机;(7)具备防淋雨措施等指标要求。
设计伺服转台在总体结构设
计上,主要考虑减轻重量、结构强度高、安装固定方便可靠、具有较好的抗振性
与系统电磁兼容性等特点。
为了保证伺服转台的结构强度,同时减轻总体重量,
伺服转台所有的机械加工件均采用铝合金5A06系列材料,伺服转台机座应用铸
铝工艺加工制造,以减轻转台重量。
同时,为了满足伺服转台防盐雾、腐蚀、湿
热等指标要求,对所有铝合金材料加工的零部件进行表面导电氧化处理,在转台
零部件装配完成后,再对伺服转台所有外表面进行喷漆处理。
3.1伺服转台结构组成设计
该伺服转台设计内部结构主要包括直流力矩电机、上轴承、下轴承、编码器、汇流环、电源、伺服控制板、伺服驱动板以及连接器等组成,底部为伺服转台安
装法兰,上部安装天线负载,主要实现方位360°连续旋转和和跟踪。
3.2伺服转台防淋雨密封设计
该伺服转台从结构上大致分为两部分:动态部分、静态部分,动态部分由旋
转盘、汇流环转轴、电机、编码器转子等组成;静态部分由机座、密封盖、伺服
驱动器保护罩及其他辅助零部件组成。
在伺服转台防淋雨措施方面设计主要考虑
以下方法:(1)提高机座与密封盖的机加精度;(2)提高两零件端面平面度要求,保证零件装配面配合紧密;(3)对于较大的装配配合面,在通过增加密封
沟槽,并在装配密封橡胶圈时,涂抹防水硅橡胶脂;(4)在装配过程中,采用
一些特殊的装配工艺,保证机座与密封盖之间的间隙均匀。
通过这些特殊的结构
设计与装配工艺改进,从而可提高各零部件之间装配配合精度。
4高精度轴系传动结构设计
根据总体技术指标要求,该伺服转台是为某设备配套研发设计的产品,该伺
服转台在工作时要满足搜索、跟踪的指向精度要求,而指向精度反映了伺服转台
对跟踪目标的准确度,它是伺服转台的一项重要技术指标,其中影响指向精度的
主要因素,有精密传动的轴系误差、轴系加工配合误差、轴系刚度及轴承尺寸误差、编码器测角误差、跟踪控制误差等,其中轴系传动精度及其稳定性对整个系
统的指向精度影响最大,因此,在轴系结构设计时,必须引起高度重视。
在以往
的轴系传动设计中,主要利用齿轮进行传动,但是齿轮传动存在齿隙误差,很难
达到较高的指向精度,为了满足该伺服转台高指向精度的指标,在设计轴系传动时,采用直流力矩电机驱动形式,电机转子直接安装在中心轴上,中心轴上下端
分别安装轴承,保证其轴系传动的稳定性和平稳性。
设备负载在工作过程中,整
个轴系作为天线负载的支撑体,同时又是直流力矩电机的动力传递到整个轴系,
实现伺服转台的方位连续旋转,因此,在设计轴系时,对轴系的材料、热处理以
及加工工艺都要进行综合考虑。
我们在设计轴系时,选用42CrMo优质合金钢材料,并对其进行调质处理,使其刚度和强度得以保证,加工精度要求径向跳动
≤0.03mm、轴向跳动≤0.03mm,上下轴承两端安装轴颈的不同轴度≤0.03mm。
在
整个轴系装配的过程中,为了满足高精度轴系设计要求,特对轴系装配过程做以下相关要求:中心轴在装配时通过打表测量,满足置中精度要求,同时,中心轴上下两端轴颈与上下轴承配合时,通过小过盈量配合,保证轴承与中心轴同轴度≤0.03mm,直流电机转子与中心轴装配时,通过打表测量满足同轴度≤0.03mm。
同时,汇流环在安装时也要满足与中心轴同轴度在0.05mm以内,这样有利于汇流环使用寿命。
通过以上轴系传动设计以及装配时调节轴系的精度,通过后期实物样机装配及测试,该转台基本满足整个伺服系统的跟踪及指向精度指标。
结束语
本文依托激光雷达结构设计,将其装配方法进行了规范化设计及验证。
因激光雷达转台具有视场范围广,惯量小,精度高等方法,在转台的小型轻量化设计上具有代表作用,因此该方法不仅仅适用于激光雷达用双轴转台,更可拓展于类似结构的小型轻量化转台的设计装配。
参考文献:
[1]张倩.伺服转台的非线性建模方法与控制策略研究[D].合肥:安徽大学电子信息工程学院,2014.
[2]赵美玲.转台速率平稳性的研究[D].哈尔滨:哈尔滨工业大学航天学
院,2013.
[3]秦伟然.某型机载雷达转台伺服系统的研发与辨识[D].西安:西安电子科技大学机电工程学院,2013.
[4]朱晓凯.激光雷达结构设计及精度分析[D].西安:西安电子科技大学,2014
[5]徐润君,陈心中.激光雷达在军事中的应用[J].物理与工程2002(6):36-39。