星载激光雷达的发展与应用
星载大气探测激光雷达发展和数据应用
| 62 激光雷达成像技术及应用星载大气探测激光雷达发展和数据应用刘 东,王英俭,王志恩,周 军中国科学院安徽光学精密机械研究所中国科学院大气成分与光学重点实验室摘要:大气探测激光雷达向大气发射激光脉冲,使用望远镜接收大气的后向散射光,经过光电探测器的转换,再将电信号采集、数字化和记录,通过相应的反演方法,得到所需要的大气参数,它是集“光、机、电、理”为一体的、定量的光学主动廓线遥感工具。
自上世纪60年代激光器发明以来,激光雷达大气探测技术就迅猛发展,根据激光脉冲与大气不同的作用原理,米散射、拉曼散射、偏振、差分吸收、多普勒、高光谱分辨、共振荧光、白光探测等技术应运而生,用于探测大气气溶胶和云,大气温度、湿度,大气风场,温室和污染气体等,充分应用到气象、气候、灾害、环境、生化和军事等领域。
随着激光技术,光学集机械加工技术和电子学采集技术的发展,大气探测激光雷达的平台也从基地,发展为可移动、船舰载和空基平台。
近20年来,由于空间激光技术和大口径轻质望远镜加工技术的发展,大气探测激光雷达已经可以成为卫星载荷,并且已经成为光学主动遥感载荷的主要发展方向之一。
目前,星载大气激光雷达主要应用于大气气溶胶和云的测量,先后经历了LITE(The lidar In‐space Technology Experiment)、GLAS(Geoscience Laser Altimeter System)和CALIPSO(The Cloud‐Aerosol Lidar and Infrared Pathfinder Satellite Observations)三个阶段。
另外,NASA(National Aeronautics and Space Administration)和ESA(The European Space Agency)都已经开始发展下一代的测量的云和大气气溶胶的高光谱分辨率星载激光雷达,来对云和大气气溶胶进行更准确的定量测量。
星载激光通信技术及其应用前景探究

星载激光通信技术及其应用前景探究在现代科技快速发展的时代,人们对通信技术的要求也越来越高。
在这个需求越来越迫切的情况下,星载激光通信技术如一颗新星般出现在人们的视野中。
解决了以往的通信技术所遇到的诸多问题,星载激光通信技术已经成为人们广泛关注的热门技术。
本文将对星载激光通信技术进行探究,略施小技巧,从其原理、应用以及未来前景三个方面进行论述。
一. 星载激光通信技术原理星载激光通信技术的原理主要分为两个部分。
首先,在地球上安置一个接收设备,并在卫星上搭载发送激光的设备。
接下来,卫星释放出高强度的激光束,该激光束将会经过大气层直射到地球接收设备的指定位置上,接受设备通过检测激光的信号来解码数据。
相比较于传统通信技术,星载激光通信技术具有以下优点:1.更高的传输速率激光通信相比较于传统的无线电波通信,具有能够提供更高传输速率的优势。
2.更安全的传输激光通信是一种采用光信号进行数据传输的技术,相较于传统的无线电波通信而言,其数据传输是更难被窃取的。
3.技术生命周期长激光通信具有长久的生命周期,相较于传统的无线电波通信,激光通信的技术寿命时间更长,不需要经常更新换代。
二. 星载激光通信技术的应用通过上述分析,可以发现星载激光通信技术具备高效、安全性好等优势,适用于多种领域:1.卫星通信应用卫星通信在很长一段时间内一直是许多应用领域的首选通信方式,然而,传统的卫星通信技术受到地球上大气的影响而传输速度上存在瓶颈。
而激光通信卫星可以通过发送的能量更快地穿过大气层,从而提高效率。
2.数据中心设备在数据中心设备的使用中,激光通信技术也可以有效地对其进行补充,使其成为一个更为完善的数据中心设备。
3.局域网技术激光通信也可以成为一种新型的局域网技术,使局域网在传输方面具有更高效的速率和更高的稳定性。
三. 星载激光通信技术的未来前景展望从目前的科技发展趋势来看,星载激光通信技术的未来前景呈现出相当强的发展趋势:1.小型化从技术发展的角度以及应用需求的角度来看,未来卫星应用和移动卫星等需要小型化的星载激光通信器件。
激光雷达测绘技术应用
激光雷达测绘技术应用随着科技的不断发展,激光雷达测绘技术已成为地理信息获取的重要手段之一。
激光雷达测绘技术是一种利用激光雷达对地表进行测量和绘图的方法,其应用范围广泛,具有很高的实用价值和使用价值。
本文将概述激光雷达测绘技术的原理和常用方法,并探讨其在不同领域中的应用场景和优势,同时通过实际案例进行分析和介绍。
激光雷达测绘技术是通过发射激光束对目标物体进行测距和定位,然后根据测量的数据绘制出地形图的一种技术。
其工作原理是通过对目标物体反射回来的激光束进行接收,并测量出激光束往返的时间,从而计算出目标物体与激光雷达之间的距离。
同时,通过测量激光束在空中的传播方向和角度,可以确定目标物体的空间位置。
激光雷达测绘技术的常用方法包括机载激光雷达测绘和地面激光雷达测绘。
机载激光雷达测绘是指将激光雷达搭载在飞机上进行测量,适用于大范围的地形测绘。
而地面激光雷达测绘是将激光雷达放置在地面上进行测量,适用于小范围的地形测绘和对特定目标的检测。
激光雷达测绘技术在不同领域中都有着广泛的应用。
在城市规划中,激光雷达测绘技术可以用于城市地形测绘、建筑物三维建模等方面,为城市规划提供高精度的数据支持。
在林业中,激光雷达测绘技术可以用于森林资源调查、林业面积测量等方面,提高林业管理的精度和效率。
在地质领域中,激光雷达测绘技术可以用于地质构造研究、矿产资源调查等方面,为地质工作提供更准确的地质信息。
实际案例中,激光雷达测绘技术应用于某大型露天矿山的测量中。
通过对矿山水文地质条件进行精细探测,激光雷达测绘技术为矿山安全生产提供了有力保障。
在矿区土地复垦和生态修复方面,激光雷达测绘技术也发挥了重要作用,为矿区生态环境的改善提供了数据支持。
激光雷达测绘技术在各个领域中都有着广泛的应用前景。
随着科技的不断进步和发展,激光雷达测绘技术将会不断完善和发展,为人类社会的发展和进步做出更大的贡献。
引言星载激光雷达是一种利用激光雷达技术对地球表面进行遥感测量的先进设备。
激光雷达测量技术的进展与应用
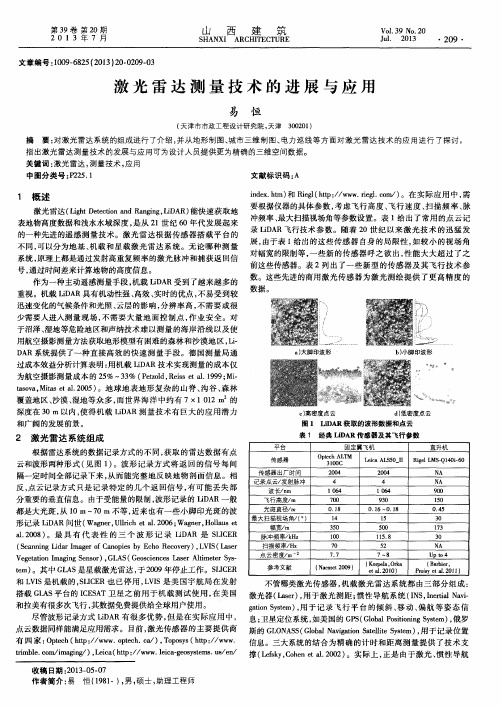
展, 由于表 1 给出的这些 传感 器 自身 的局 限性 , 如 较 小 的视场 角 对幅宽 的限制等 , 一些 新 的传感器 呼之 欲 出 , 性 能大 大超 过 了之 前这些传感器 。表 2列 出了一些 新 型的传感 器及 其 飞行 为激 光测绘 提供 了更 高精 度 的 数据 。
2 0 o 4 4 1 0 6 4 N A N A 9 O 0
¥
~
传感 器出厂时间 记录点云/ 发射脉冲 波 ̄ ( z / n m
2 O 0 4 4 1 0 6 4
飞行高度/ m
光斑直 r f /
7 0 0
O . 1 8
i n d e x . h t m) 和R i e g l ( h t t p : / / w w w . r i e g 1 . c o m / ) 。在 实际 应用 中, 需 要根 据仪器 的具体参 数 , 考虑 飞行 高度 、 飞行 速度 、 扫 描频 率 、 脉 冲频率 、 最大扫描视场角等参数设 置。表 1给 出 了常 用的点 云记
激 光 雷 达 测 量 技 术 的 进 展 与 应 用
易 怛
( 天津市市政工程设计研究院 , 天津 3 0 0 2 0 1 )
摘
要: 对激光雷达 系统 的组成进 行了介绍 , 并从地形 制图 、 城市 三维 制 图、 电力巡线 等方面对 激光 雷达技术 的应 用进行 了探讨
指出激光雷达测量技术 的发展 与应用可为设计人 员提供更 为精确的三维空间数据。
深度在 3 0 m 以内 , 使得机 载 L i D A R测量 技术 有巨 大的应 用潜 力
和广阔 的发展前 景。
豳 ● 豳
- …一
a ) 大脚印波形 b ) 小脚印波形
中国国防军事近代史作业——激光雷达测量技术的发展概况
《中国近代国防科技史》课程报告激光雷达(LIDAR)测量技术单位:四院五队姓名:周杰学号:GS12041103激光雷达(LIDAR)测量技术激光雷达(LIDAR)测量技术是从20世纪中后期逐步发展起来的一门高技术,可用于地球科学和行星科学等许多领域。
美国早在20世纪70年代阿波罗登月计划中就使用了激光测高技术。
20世纪80年代,激光测高技术得到了迅速发展,人们研制出了实用的、可靠的激光测高传感器,其中包括航天飞机激光测高仪( Shuttle Laser Altimeter, SLA )、火星观测激光测高仪(Mars Observer Laser Altimeter, MOLA)以及月球观测激光测高仪(LunarObserver Laser Altimeter, LOI.A )。
借助这些激光测高仪,人们可以获取地球、火星及月球上高垂直分辨率的星体表面的地形信息,这对于研究地球和火星等行星的真实形状有着重要的科学意义。
上述这些激光测高仪的激光束的指向一般是固定的,需依靠搭载激光测高仪的飞行器绕星体的周期运动来获得星体上大范围离散分布的激光脚点的高程数据。
20世纪90年代前后,随着GPS动态定位和高精度姿态确定等定位、定姿技术的发展成熟,人们设计将激光测高仪安置在飞机上,同时为了提高采点效率和带宽,采用扫描的方式来改变激光束的发射方向,将这些设备有机地集成在一起协同工作,就构成了一个机载激光雷达测量系统。
随后几年,机载激光雷达测量技术蓬勃发展,欧美等发达国家先后研制出了多种机载激光雷达测量系统。
机载激光雷达测量技术的发展为我们获取高时空分辨率的地球空间信息提供了一种全新的技术手段,使我们从传统的人工单点数据获取变为连续自动数据获取,不仅提高了观测的精度和速度,而且使数据的获取和处理朝智能化和自动化的方向发展。
机载激光雷达测量技术可广泛用于快速获取大面积三维地形数据、快速生成DEM等数字产品。
机载激光雷达测量在灾害监测、环境监测、海岸侵蚀监测、资源勘察、森林调查、测绘和军事等力一面的使用具有独特的优势和广泛的使用前景。
激光雷达未来的趋势

激光雷达未来的趋势激光雷达是一种利用激光脉冲对目标进行测距和成像的雷达技术。
相比传统的雷达技术,激光雷达具有高分辨率、高精度、高速率等优势,因此被广泛应用于机器人导航、自动驾驶、智能交通等领域。
未来的激光雷达将继续发展演进,具有以下几个趋势:一、小型化和紧凑型设计:未来的激光雷达将更加小型化和紧凑,以适应更多应用场景的需求。
通过采用新型的激光器、探测器和光学元件,激光雷达的体积将被进一步压缩,从而更方便地集成到各种设备中,如机器人、无人车等。
二、高分辨率和高精度:激光雷达的分辨率和精度将进一步提升。
通过采用更高功率的激光器和更灵敏的探测器,激光雷达可以实现更高的分辨率和更低的误差,提高对目标的探测和测量能力。
这将使得激光雷达在目标识别、障碍物避障等方面有更广泛的应用。
三、多波束和全景扫描:未来的激光雷达将采用多波束和全景扫描技术,提高对目标的感知能力。
通过同时发射多个激光束,并采集返回的信号,可以获得目标的多角度信息,从而更准确地还原目标的形状和位置。
这将使得激光雷达在三维重建、环境建模等方面有更广泛的应用。
四、高速率和实时性:未来的激光雷达将具备更高的扫描速度和更快的数据处理能力,实现更高的工作帧率和实时性。
通过采用高速控制和数据传输技术,激光雷达可以更快地完成对目标的扫描和数据采集,并将数据实时传输给处理系统。
这将使得激光雷达在自动驾驶、智能导航等领域有更广泛的应用。
五、代价降低和商业化应用:未来的激光雷达将进一步降低成本,实现商业化应用。
目前激光雷达的价格较高,限制了其在普通消费者市场的应用。
未来随着技术的进步和产业的发展,激光雷达的成本将进一步降低,从而使得其在智能手机、无人机等领域得到更广泛的应用。
六、多模式融合和传感器互补:未来的激光雷达将与其他传感器进行多模式融合和传感器互补。
通过将激光雷达与摄像头、雷达、惯性导航等传感器进行融合,可以获得更全面、更准确的环境感知和定位信息。
这将有助于提高自动驾驶、智能导航等系统的安全性和可靠性。
大气探测激光雷达网络和星载激光雷达技术综述
大气探测激光雷达网络和星载激光雷达技术综述摘要:大气探测激光雷达以精细的时空分辨率、髙探测精度和连续廓线数据获取能力成为大气探测强有力的工具。
通过激光雷达观测网络和星载激光雷达,可以获得大空间尺度持续的四维大气信息,满足环境、气象和气候研究的需要。
介绍了目前存在的比较重要的激光雷达网络和航天强国的星载激光雷达计划。
关键词:大气激光雷达;网络化探测;星载探测;环境监测引言激光雷达具有精细的时间分辨率、优越的方向性和相干性、大的垂直探测跨度、高的探测精度和实时快速的数据获取能力,已经成为大气探测强有力的工具可用来探测气瘠胶和云、温度、大气密度、水汽、臭氧、温室气体、风场、能见度、大气边界层等.激光雷达根据运载平台的不同,可分为地基式、车载式、船载式、机载式、星载式激光雷达.单站的地基激光雷达、车载激光雷达、机载激光雷达在观测范围方面都有一定的区域限制,难以进行全球范围的连续式观测。
但是在气候研究中,仅有局部的大气探测信息是远远不够的。
为了适应全球气候和环境变化对气象资料的空间分布和时间分布演变资料的迫切需求,在世界气象组织、联合国环境署及区域性国际组织的倡导下,在全球范围内已经建立了一些探测大气成分物理化学性质的四维分布的区域观测网络,现存比较重要的激光雷达网包括:全球大气成分变化探测网、欧洲气溶胶研究激光雷达观测网、独联体激光雷达网、亚洲沙尘激光雷达观测网、微脉冲激光雷达网、美国东部激光雷达观测网等.而且,目前正在积极计划发展覆盖区域更广泛、观测内容更丰富、时空分辨率更高的激光雷达观测网:全球大气气溶胶激光雷达观测网。
1激光雷达观测网目前激光雷达观测网主要有:NDACC、EARLINET、AD-NET、REALM、MPLNET、CIS-LINET等。
激光雷达观测网可以获得大面积的空间覆盖,获得区域和全球范围大气廊线探测数据。
不同观测网成员之间相互合作,可以对同一过程或事件(如沙尘事件、火山爆发和深林火灾等)进行不同时间、不同地点的综合观测,发现新的现象和机理。
激光雷达测绘卫星发展及应用
激光雷达测绘卫星发展及应用关键词:激光测绘卫星;应用;展望激光雷达测绘卫星通过星载激光器以一定频率向地面发射激光脉冲,光束穿过大气后,被目标散射,产生微弱的后向散射回波。
回波由激光测高仪上的望远镜接收,通过光电信号转换和时间测量,计算出激光器与探测目标间距离值,再结合卫星姿态、平台位置、激光指向等信息,得到激光足印点的精确三维空间坐标。
其具有主动获取全球地表高程能力,可为快速获取包括境外地区在内的高程控制点和立体测图提供服务,并在极地冰盖、植被高度等方面发挥着重要作用。
一、激光雷达卫星ICESat-21、配置特点。
ICESat-2和ICESat最显著变化是使用光子计数激光雷达取代传统线性探测系统,后者需返回成千上万个光子,通过全波形采样及波形分析获得点云坐标,ICESat-2光电倍增管接收器探测灵敏度处于单光子级别,可标记每个光子返回接收器的时间,计算坐标,提高了探测效率。
由于卫星主要科学目标是测量冰冻圈变化,需尽可能在相同/相近位置多次测量。
ICESa-2设置1387个地面参考轨迹,RGT固定不变,为获得参考轨迹线的高程值,强弱光束必须位于RGT的左右两侧。
因此,要求激光指向控制精度优于45m。
由于采用光子计数探测系统,发射激光能量降低,强波束为120μJ(弱波束为四分之一),激光重频增加,高达10kHz,沿轨点间距仅0.7m,与ICESat相比,数据密度大幅提高。
2、数据处理1)点云去噪。
光子计数激光雷达探测灵敏度高,噪声多,数据信噪比低。
虽然ICESat-2接收器配备了窄带滤波片,波段范围限于(532.272±0.15)nm,但该范围内仍有大量背景太阳光。
在一些高太阳角及高地面反射率场景中,背景光噪声率达到约10MHz,因此点云去噪较重要。
当前,大多现有的光子计数激光雷达设备只记录沿飞行方向的数据,因此通常在二维剖面上处理。
ICESat-2基础理论算法文件ATL03和ATL08分别提供了直方图及空间密度去噪算法:直方图法认为,垂直方向上点出现最多位置更可能是信号;空间密度法认为信号点在空间分布上更密集,密度直方图将显示“左噪右信”、“高窄噪低信号”的分布特征。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期: 2007- 05- 29 作者简介: 李 然, 北京市海淀区北三环西路 54 号中国科学院遥感卫星地面站, 研究方向为遥感应用; E- mail: rli@rsgs.ac.cn
唐伶俐( 通讯作者) , 北京市海淀区北三环西路 54 号中国科学院遥感卫星地面站, 研究员, 研究方向为卫星遥感图像处理与应 用; E- mail: lltang@aoe.ac.cn
综述文章( Re vie ws )
Science & Technology Review 2007 Vol. 25 No. 14 (Sum No. 236)
星载激光雷达的发展与应用
李 然 1, 王 成 2, 苏国中 2, 张珂殊 2, 唐伶俐 1, 李传荣 2
1. 中国科学院遥感卫星地面站, 北京 100086 2. 中国科学院光电研究院, 北京 100080
400
50
600
800
观测对象
月球
火星 Eros 小行星
极地冰盖、
云顶高
云 、气 溶 胶
和云层边界
Nd:YAG
DPSS
Nd:YAG Nd:YAG Nd:YAG
型号
@532/1064nm Nd:YAG
@532/1064nm @1064nm @1064nm
(3 备份)
@1064nm
脉冲
<10
8
12
4
20
远红外相机以及激光测距仪( LiDAR) 等多个探测器同 时工作, 以尽可能多地获取月球的有关信息 ( 见图 1) 。 Clementine 上的 LiDAR 设备测量所得的数据资料用于 制作月球表面高程图, 也可以用于研究岩石圈的应力应 变特性; 或结合重力信息研究月球外壳密度分布等。 Clementine 系统中星载 LiDAR 设备运行的实际轨道高 度为 640 km, 覆盖了月球两极 60°之间的范围, 在轨测 量时运行 45 min 后可以稳定在 1 Hz 的脉冲重复频率[8]。
Ke y Words : spaceborne LiDAR; system parameters; altimetry; environmental monitoring
CLC Numbe r: TN958.98
Docume nt Code : A
Article ID: 1000- 7857(2007)14- 0058- 06
LiDAR 技术在西方国家发展相对成熟, 已经投入 商业运行的激光雷达系统( 主要指机载) 主要有 Optech ( 加拿大) 、TopSys( 法国) 和 Leica( 美国) 等公司的产品。 由于机载 LiDAR 激光发散角、扫描视场角、飞行区域等 因素的限制, 阻碍了机载 LiDAR 对全球范围数据的获
0.176
发散角/mrad 4mrad@532nm
望远镜口径
与高分辨率 相机共用,
!12 mm
!500 mm !90 mm
!1.0 m
!600 mm ( 数目: 4)
接收 系统 视场角( FOV)
1 mrad 总接收面积
0.5 mm2
0.85 mrad
>0.9 mrad
0.475mrad@1064nm 0.15mrad@532nm
applications of spaceborne LiDAR in many spheres of the science are reviewed in detail. Finally, it is pointed out the possibility
and necessity of developing the spaceborne LiDAR at the present stage.
1064 nm: 0.15 m ( 冰、陆地) 40
532 nm:75 ̄200 m (云)
1064 nm: 170 m ( 沿轨方向)
532nm: 150 m/50 km ( 云/气溶胶)
10 km
59
综述文章(view 2007 Vol. 25 No. 14 (Sum No. 236)
58
综述文章( Re vie ws )
科技导报 2007 年 第 25 卷 第 14 期 ( 总第 236 期)
研究, 如美 国 、欧 洲 和 日 本 等 都 提 出 并 实 施 了 一 些 星 载 LiDAR 发 展 计 划。下面对 20 世纪 90 年代以来关于 星载 LiDAR 的主要科学研究进行详 细 介 绍 。 表 1 列 出 了 各 星 载 LiDAR 系统的详细参数。 1.1 美国星载 LiDAR 系统
5
300
240
基本
参数 功耗/W
6.8
20.7( 最高)
34.2
330
450
16.5( 平均)
月球
火星 近地小行星
ICESat
平台
探测器
探测器 探测器
卫星
卫星
Clementine
MGS NEAR
发射 发射时间
1994
1996
1996
2003
1996
及轨道
计划寿命/a
3
3
1
3
3
信息
轨道高度/km
640
雷达 NASA Langley 研 究 中 心 1994 年承研空间激光雷达实验项目 LITE( Lidar In- space Technology Experiment) 中的星载差分吸收激光 雷 达 ( Differential Absorption Lidar, DIAL) , 主要用于大气成分的测定, 如 水 蒸 气 、臭 氧 及 大 气 污 染 体 的 空 间 浓 度分布等, 可以提供对流层的臭氧和 气溶胶的剖面图。星载 DIAL 系统的 卫星轨道高度为 400 km, 选用高功率 的可调谐紫外光激光器, 两个能穿透 同温层的激光波长 308/318 (±2) nm,
宽度/ns
脉冲
激光器
Continuous@1Hz
重复
10 1/8, 1, 2, 8
40
100
400shots@8Hz
频率/Hz
单脉冲 171mJ@1064nm 48
能量/mJ 9mJ@532nm
75mJ@1064nm
>5
100
35mJ@532nm
光束 <0.5mrad@1064nm
0.4
0.235
0.1
[中图分类号] TN958.98
[文献标识码] A
[文章编号] 1000- 7857(2007)14- 0058- 06
Development and Applications of Spacebor ne LiDAR
LI Ra n1, WANG Che ng2, S U Guozhong2, ZHANG Ke s hu2, TANG Lingli1, LI Chua nrong2
[摘要] 简要介绍了激光雷达的原理和发展过程, 并对国外主要星载激光雷达系统( MOLA, GLAS 等) 的技术参数和科学目标等进行了
详细的叙述, 总结了星载激光雷达在各领域中的应用情况, 最后指出了现阶段我国发展星载激光雷达的可能性和必要性。
[关键词] 星载激光雷达; 系统参数; 高程测量; 环境监测
1. China Remote Sensing Satellite Ground Station, Chinese Academy of Sciences, Beijing 100086, China 2. Academy of Opto- Electronics, Chinese Academy of Sciences, Beijing 100080, China
美国航空航天局( NASA) 在星载 LiDAR 的 研 制 和 应 用 上 一 直 独 占 鳌 头 [3]。1994 年 Clementine 探 月 计 划 中, 采用了星载 LiDAR 获取高精度 月球表面特征信息。1996 年发射的 火星全球勘探者号 MGS( Mars Global Surveyor) 搭载了火星轨道激光测高 仪 2 号 MOLA- 2 ( Mars Orbiter Laser Altimeter) , 获取 了 大 量 火 星 表 面 的 地形特征数据。在 MOLA- 2 建造、试 验 和 发 射 准 备 的 同 时 , NASA 利 用 MOLA 研制过程中的备份器件, 进行 了 航 天 飞 机 搭 载 LiDAR 的 试 验 , 即 Shuttle Lidar Altimeter- 01( SLA, 1996 年 1 月 ) 和 SLA- 02 ( 1997 年 8 月 ) , 获取了高精度全球控制点信息。而后 NASA 根 据 早 先 提 出 的 采 用 星 载 LiDAR 测 量 两 极 地 区 冰 面 变 化 的 计 划, 正式将地球科学激光测高仪 GLAS ( Geosciences Laser Altimeter System) 列入地球观测系统( EOS) 中, 并将其搭载在 ICESat( Ice, Cloud and Land Elevation Satellite, 冰体、云量和 陆地高度监测卫星) 上, 于 2003 年发 射升空运行, 是目前唯一在轨运行的 星 载 激 光 测 高 系 统[4- 5]。 1.1.1 NAS A/La RC 的 星 载 差 分 吸 收
表 1% 国外主要星载 *Li+,D-AR. 系统参数 8Ta29bl:4e 1% P;a2<r2am=e4t>e4r<s of main overs eas S paceborne LiDAR s ys tem
系统
Clementine MOLA- 2 NRL