计算时间与空间关系的定量分析
空间对准关系及其定量描述方法
空间对准关系及其定量描述方法巩现勇;行瑞星;李靖涵;裴洪星【摘要】空间对准是最基本的空间排列形式之一,属于高层次的空间关系概念.根据Gestalt心理学的空间认知原理,提出空间对准的概念及其定量描述和计算方法.通过定义正对投影长度比,实现空间对准的定量描述与计算,表明其具有平移、旋转、尺度不变性,弱反身性,不可传递性等.通过模拟实验分析和城市双线道路识别与建筑群直线模式识别两个真实案例,证明文中方法的实用性和有效性.%Spatial alignment is a basic spatial structure, which belongs to high level spatial conception.Based on the spatial cognition principles of Gestalt, the spatial alignment model is proposed with quantitative description and calculation.On the basis of related research at home and abroad, the motivation is given from the points of Gestalt, spatial perception topology, psychology and map information theory.Spatial alignment is quantitatively modeled by facing ratio and five characteristics are obtained.Two real cases, named two-lane roads recognition and linear pattern detection have verified the practicability and effectiveness.【期刊名称】《测绘工程》【年(卷),期】2017(026)010【总页数】6页(P7-11,17)【关键词】空间关系;空间对准;正对投影长度比;定量描述【作者】巩现勇;行瑞星;李靖涵;裴洪星【作者单位】信息工程大学地理空间信息学院,河南郑州 450001;地理信息工程国家重点实验室,陕西西安 710054;信息工程大学地理空间信息学院,河南郑州450001;地理信息工程国家重点实验室,陕西西安 710054;信息工程大学地理空间信息学院,河南郑州 450001;地理信息工程国家重点实验室,陕西西安 710054;信息工程大学地理空间信息学院,河南郑州 450001【正文语种】中文【中图分类】TP75地理要素在空间中的排列现象是自然界最普遍的空间分布结构[1-2]。
GIS空间分析复习总结

第一早空间分析概念:GIS空间分析是从一个或多个空间数据图层获取信息的过程。
空间分析是集空间数据分析和空间模拟于一体的技术,通过地理计算和空间表达挖掘潜在空间信息,以解决实际问题。
空间分析在GIS中的地位与作用:空间分析是GIS的核心,也是核心功能,是GIS领域的理论性和技术性都很强的分支,是提升GIS的理论性十分重要的突破口,空间分析是地理信息系统的主要特征,是评价一个地理信息系统的主要指标之一。
第■早空间分析的基本理论:空间关系理论,空间认知理论,空间推理理论,空间数据模型理论,地理信息机理理论,地理信息不确定性理论空间关系分类:顺序关系:主要指目标间的方向关系,度量关系:主要是指目标间的距离关系,拓扑关系:指拓扑变换下的拓扑不变量()度量关系对空间数据的约束最强烈;顺序关系次之;拓扑关系最弱。
空间度量关系:分为定量度量(空间指标量算,距离度量)和定性度量定量度量空间关系分析包括空间指标量算(距离、面积、坡度、人口密度等)和距离度量(距离)两大类拓扑空间关系:指拓扑变换下的拓扑不变量,如空间目标的相邻和连通关系,以及表示线段流向的关系。
拓扑变换的条件:在原来图形的点与变换了图形的点之间存在着—对应的关系,并且邻近的点还是邻近的点方向空间关系:源目标相对于参考目标的顺序关系(方位)度量空间关系描述:欧氏距离:直线距离d(A B) = x j -x22■ M - y2)2切比雪夫距离:最大距离d(A B) = max(|X j「x2 I M「y2 I)马氏距离(曼哈顿距离):垂直距离大地测量距离:即球面上两点间的大圆距离曼哈顿距离:纬度差加上经度差拓扑空间关系描述:4元组模型:该模型将简单空间实体看作是边界点和内部点。
构成的集合,4元组模型为由两个简单空间实体点集的边界与边界的交集、边界与内部的交集、内部与边界的交集、内部与内部的交集构成的2X 2矩阵。
9元组模型:9元组在4元组的基础上,在空间描述框架中引入空间实体的“补”的概念,将空间目标A表示为边界、内部和外部三个部分的集合。
作业空间设计的定量分析与仿真_张莉立

1999年9月第17卷第3期长沙铁道学院学报JO U RN A L OF CHAN G SHA RA IL W A Y U N IV ERSI T YNo3Sept.1999作业空间设计的定量分析与仿真a张莉立(长沙铁道学院机电院,长沙,410075)摘 要 从人机工程学的角度研究了作业空间和作业场所的设计,探讨了作业范围的空间尺度与人体尺度的相互关系及运用人体数学模型分析人的近身作业空间,并进行计算机仿真.关键词 作业空间;功能性臂长;测定;仿真分类号 TB18T he Q uantitive A nalysis and Simulation of Working Space DesignZhang L ili(Electromechanic Engin eering College,C han gsha Railw ay University,Changsh a,410075)Abstract This paper,fro m the m an-machine engineering,discusses the desig n o f w ork-ing space and w orking area.T hen the inter relationship betw een the w orkingscale and the hum an bo dy scale of the w orking area is studied and the w ork-ing space near human bady is analy sed.At last com puter simulatr io n is made.Keywords w or king space;functionmal arm leng th;m easur e,simulation引 言 机器设备、用具、被加工对象所占有的空间以及人操作机器设备时所需的活动空间称为作业空间.一个优良的作业空间或作业场所,必须使作业者能方便而迅速地完成作业.近身作业空间是指作业者在某一位置时,考虑身体的静态和动态尺寸,在坐姿或站姿状态下,其所能完成作业的空间范围.近身作业空间的尺寸是作业空间设计与布置的主要依据,它主要受功能性臂长的约束,所以通过功能性臂长的测量可以决定个体近身作业空间的尺度,从而求出最大的作业范围和最舒适的作业区域,实验的结果可以用来确定和检验作业场所的布置,作业面的设计以及工作台的设计.1 原理和方法1.1 人体模型功能尺寸是针对特定的作业而言的,不同的作业会造成不同的作业姿势的所需的作定空间,所以臂长的功能尺寸是由作业方位及作业性质来决定的.以坐姿的近身作业空间为例:坐a收稿日期:1998—12—12 作者 张莉立,女,34岁,讲师姿作业通常在作业面上进行,其作业范围是一个三维空间,随着作业面高度,手偏离身体中线的距离及手举高度的不同,其舒适和最大的作业范围也在发生变化.为了进一步分析人体的动作范围和作业区域,我们引用人体数学模型对人体各部分尺寸和相对位置进行描述.图1 人体侧面数学模型构成图 在空间直角坐标中,以p i 点,i =1,2,3,…13表示人体的13个部位,其中p 1,p 2为左右脚着地点,p 3,p 4为左右膝关节,p 5为髋关节,p 6为颈关节,p 7,p 8为左右肩关节,p 9,p 10为左右肘关节,p 11,p 12为左右手中指指尖,p 13为头部.各点之间的直线联线就构成人体各部分,如躯干、四肢等.连线之间的夹角H i (t ),i =1,2,…,10,表示各关节点处肢体间的夹角,其中H1,H 2为左右足膝关节夹角,H 3为躯干倾斜角;H 4,H 5为左右臂开放角;H 6,H 7为左右肘开放角;H 8为头部倾斜角,H 9,H 10为左右踝开放角,在这里p i ,H i 都是时间的常数.用上述数学模型可以表示各种作业姿势(站立,弯腰,前屈,下蹲(含坐姿)).例如:坐姿可以表示为:p z =[0°<H 1(t )F 60°]∧[0°<H 9(t )<60°]∧[0°<H 2(t )F 60°]∧[0°<H 10(t )<60°]∧[0°<H 3(t )<(90°-D )]其中,符号“∧”代表同时发生的距离且0°F D F 10°.1.2 约束条件坐姿是一种常见的工作姿势,适合从事精确、细致、连续和较长时间的操作(以下讨论针对坐姿).假定坐标系的零点位于人体的正中矢状面上,并且在给定人体模型的条件下,人体所受的约束如下:1) 髋关节与椅子的交点p 5为固定,并设为坐标原点,表为(0,0,0);2) 身体可向前运动,但不能向别的方向移动;将人体的正前方定正X 轴,人体的正右方定为Y 辆,人体头侧端方向定为正Z 轴3) 在上述参考坐标系下,颈关节的坐标表为(a ,0,c ),其中a >0,c >0,且a 2+c 2=l 21,(其中l 1为上身长即坐姿颈椎总高);设肩和Y 轴平行,则左右肩关节分别表为:p 7(a ,-l 2,c )和p 8(a ,l 2,c ),l 2为12的肩峰宽.4) 这里认为,手臂是一条直线,即H 6(t )=180°,H 7(t )=180°,手自由运动,但不向后.且设左手中指指类的坐标表示为p 11(x 1,y 1,z 1),右手中指指尖的坐标表示为p 12(x 2,y 2,z 2).它们到肩关节p 7,p 8的距离应等于臂长l 3(假定左右臂长等长),且l 3=d w +d f (d w 为上臂长,d f 为前臂长).5) 功能性臂长可定义为双手中指指尖p 11,p 12到原点p 5的距离,表示为d g ,以人体的右手为例,dg 2=x 22+y 22+z 22.1.3 坐姿作业范围描述人的上肢可及范围主要受功能臂长的约束,坐姿时两臂向前的作业活动范围,可以用中指指尖p 11,p 12的运动轨迹来表达.(1) 当l 3=d w +d f 且H 6(t )=180°,H 7(t )=180°,并且有d g 最大时p 11,p 12的轨迹为坐87第3期 张莉立:作业空间设计的定量分析与仿真 姿时双手最大的作业范围.(2) 当l 3=d f 且H 4(t )=0°,H 5(t )=0°,并且有d g 最大时p 11,p 12的轨迹为坐姿时双手舒适的作业范围,实际上为一个球面.假设两手是对称的,这里先求右手的可及范围,经过运算可得双手的可及范围.合并即可.问题描述如下:a 2+c 2=l 21 (1)(x -a )2+(y -l 2)2+(z -c )2=l 23 (2)y =x tan(A )+l 2 (x E 0) (3)A 为引入的辅助变量,表示右手中指指尖p 12在XOY 平面的投影和右肩点p 8在XOY 平面的投影的连线与过右肩并平行于X 辆直线的夹角.如图所示.图2 右手计算示意图 令z =h ,在XOY 平面上,求(x ,y )=m ax(x 2+y 2).将(3)代入(2),然后与(1)联立,得关于c 的二次方程:(K 2+1)c 2+2EK c +E 2-l 21=0(4)其中K =-h x ,E =l 21+h 2+x 2sec 2(A )-l 232x,显然根据上面的分析,(4)是有解的,那么它的判别式$E 0,从而得到关于x 的4次不等式:-N 2x 4-(2M N -4l 21)x 2+4l 21h 2-M 2E 0(5)N =sec 2(A ),M =l 21+h 2-l 23.上式的右边是关于x 2的开口向下的抛物线,x 2取值区间位于它的两根之间的区域,再根据问题的性质,所要的正是最大的那个根.即x =(max (roots ($)))12(6)右手最大可及范围计算顺序如下:1) 输入数据l 1,l 2,l 3,等高线条数N ,并据此定出最下面的等高线高度及等高线之间的差;按顺序分别求每一条等高线(以坐标表示)2) 对于每一条等高线(1) 令A 在0到P /2之间变化,且0F A F P /2.对应每一个A ,按(6)式求出x ,再按(3)式求出y ;将所求的x ,y 按顺序放到各自的数组中;(2) 根据对称性,对所得的数组进行处理,得到整条等高线的数据;求出所有等高线之后,即得到右手中指指尖p 12不同高度的运动轨迹.然后将右手的数据进行坐标平移,得到左手的数据.把这些数据连起来,并将重迭的部分去掉,即得到双手的最大可及范围.从前面的分析可得整个计算框图如图3所示.按照类似的方法和步骤,可以得到人体舒适的作业范围.2 仿真试验的图形分析与应用2.1 图形分析88 长沙铁道学院学报 1999年图3计算顺序流程图输出数据和图形坐标平移以后,得到左手的数据得到右手的数据J+1计算每一条等高线J=NJ=1w f123输入l ,l ,l ,d ,d 决定等高线条数N根据GB1000-88,中国成年人人体尺寸中,18~60周岁男性第五百分位的数据[可及范围采用低百分位作为设计依据]:令l 1=61.5cm,l 2=12×34.4=17.2cm,l 3=d w +d f =(21.6+28.9)=50.5cm 可得出中国成年人(18~60周岁男性)坐姿时双手最大的作用范围(适应域90%).如图4,图5所示.图4 平面双手最大作业范围 图5 三维双手最大作业范围 令l 1=61.5cm ,l 2=17.2cm ,l 3=d f =21.6cm可得出中国成年人18~60岁男性坐姿时舒适的作业范围(适应域90%).如图6,图7所示.2.2 应用实例电力机车司机室的设计及布置应从安全、人机工学及美学三个层次综合考虑,其中司机操纵台是驾驶机车的主要工作场合.司机的近身作业空间是操纵台设计(包括面板设计以及仪表和控制件的布置)的主要依据.SS 4b 型机车司机室(图略),从中可知,操纵台的显示和控制安排凌乱,主控制器在舒适作业区外.89第3期 张莉立:作业空间设计的定量分析与仿真 图6 双手舒适作业范围 图7 三维双手舒适作业范围重新设计的SS 4b 机车司机室(图略),主控制器在最佳作业区之内.3 结束语 作业空间的设计从理论讲主要依据近身作业空间的尺度,而近身作业空间主要受功能性臂长的约束,所以测量臂长的功能尺寸以及双手的作业范围对作业空间的设计有很重要的意义.但是,要设计一个合适的作业空间,除了考虑人体尺度以外,还要考虑各个元件的布置造型与样式,操作者的舒适性和安全性,考虑避免差错,提高效率.从人机工程学的角来看,其结果对每个单项而言,可能不是最优的,但应最大程序的减少作业者的不便与不适.参 考 文 献 1 丁玉兰编著.人机工程学.北京:北京理工大学出版社,19902 郭青山等编.人机工程设计.天津:天津大学出版社,19943 赵江洪译著.普通人体工程学.北京:北京科学技术出版社,19874 刘友梅主编.韶山3型电力机车.北京:中国铁道出版社,199190 长沙铁道学院学报 1999年。
地理信息系统——原理方法和应用08空间分析

地理学中的第一条法则,任何事物都与其它事情相关,但是距离近的事物比距离远的关系更大。
Waldo Tobler第八章空间分析导读:空间分析源于60年代地理和区域科学的计量革命,在开始阶段,主要是应用定量(主要是统计)分析手段用于分析点、线、面的空间分布模式。
后来更多的是强调地理空间本身的特征、空间决策过程和复杂空间系统的时空演化过程分析。
实际上自有地图以来,人们就始终在自觉或不自觉地进行着各种类型的空间分析。
如在地图上量测地理要素之间的距离、方位、面积,乃至利用地图进行战术研究和战略决策等,都是人们利用地图进行空间分析的实例,而后者实质上已属较高层次上的空间分析。
地理信息系统集成了多学科的最新技术,如关系数据库管理,高效图形算法,插值,区划和网络分析,为空间分析提供了强大的工具,使得过去复杂困难的高级空间分析任务变得简单易行。
目前绝大多数地理信息系统软件都有空间分析功能。
空间分析早已成为地理信息系统的核心功能之一,它特有的对地理信息(特别是隐含信息)的提取、表现和传输功能,是地理信息系统区别于一般信息系统的主要功能特征。
空间分析是对分析空间数据有关技术的统称。
根据作用的数据性质不同,可以分为:(1)基于空间图形数据的分析运算;(2)基于非空间属性的数据运算;(3)空间和非空间数据的联合运算。
空间分析赖以进行的基础是地理空间数据库,其运用的手段包括各种几何的逻辑运算、数理统计分析,代数运算等数学手段,最终的目的是解决人们所涉及到地理空间的实际问题,提取和传输地理空间信息,特别是隐含信息,以辅助决策。
本章介绍GIS中实现空间分析的基本功能,包括空间查询与量算,缓冲区分析、叠加分析、路径分析、空间插值、统计分类分析等,并描述了相关的算法,以及其中的计算公式。
1.空间查询与量算查询和定位空间对象,并对空间对象进行量算是地理信息系统的基本功能之一,它是地理信息系统进行高层次分析的基础。
在地理信息系统中,为进行高层次分析,往往需要查询定位空间对象,并用一些简单的量测值对地理分布或现象进行描述,如长度,面积,距离,形状等。
定量分析与定性分析相结合
定性分析就是对研究对象进行“质”的方面的分析。
具体地说是从而能去粗取精、去伪存真、由此及彼、由表及里,达到认识事物本质、揭示内在规律。
定性分析主要是解决研究对象“有没有”“是不是”的问题,:1、分析综合 2、比较 3、抽象和概括定量分析:对社会现象的数量特征、数量关系与数量变化的分析。
其功能在于揭示和描述社会现象的相互作用和发展趋势。
定性分析与定量分析是人们认识事物时用到的两种分析方式 [1]。
定性分析的理念早在古希腊时代就得到了很好的展开,那个时候的一批的著名学者,在自己的研究之中都是给自己所研究的自然世界给以物理解释。
例如:亚里士多德研究过许多的自然现象,但在他厚厚的著作之中,却发现不了一个数学公式。
他对每一个现象的都是虽然这种认识对我们认识感官世界功而把定量分析作为一种分析问题的基础思维方式始于伽利略,作为近代科学的奠基者,伽利略第一次把定量分析全面展开在自己的研究之中,从动力学到天文学,伽利略抛弃了以前人们只对事物原因和结果进行主观臆测成分居多的分析,而代之以实验,数学符号,公式,可以这样说,。
因而,定量分析作为一种古已有之但是没有被准确定位的思维方式,其优势相对于定性分析的是很明显,它把事物定义在了人类能理解的范围,由量而定性。
定性分析与定量分析应该是统一的,相互补充的; ; 定性分析是定量分析的基本前提,没有定性的定量是一种盲目的、毫无价值的定量; ; 定量分析使之定性更加科学、准确,它可以促使定性分析得出广泛而深入的结论。
相比而言,前一种方法更加科学,但需要较高深的数学知识,而后一种方法虽然较为粗糙,但在数据资料不够充分或分析者数学基础较为薄弱时比较适用,更适合于一般的投资者与经济工作者。
但是必须指出,两种分析方法对数学知识的要求虽然有高有低,但并不能就此把定性分析与定量分析截然划分开来。
事实上,现代定性分析方法同样要采用数学工具进行计算,而定量分析则必须建立在定性预测基础上,二者相辅相成,定性是定量的依据,定量是定性的具体化,二者结合起来灵活运用才能取得最佳效果。
高考物理模型101专题讲练:第8讲 滑块——木板模型之定量计算
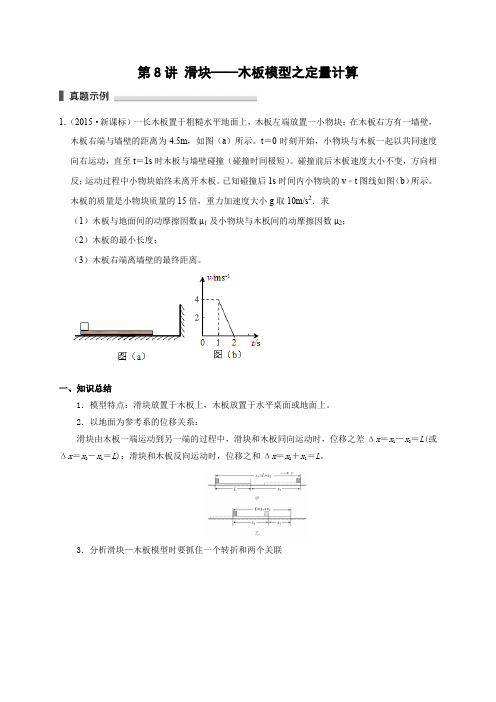
第8讲滑块——木板模型之定量计算1.(2015·新课标)一长木板置于粗糙水平地面上,木板左端放置一小物块;在木板右方有一墙壁,木板右端与墙壁的距离为4.5m,如图(a)所示。
t=0时刻开始,小物块与木板一起以共同速度向右运动,直至t=1s时木板与墙壁碰撞(碰撞时间极短)。
碰撞前后木板速度大小不变,方向相反;运动过程中小物块始终未离开木板。
已知碰撞后1s时间内小物块的v﹣t图线如图(b)所示。
木板的质量是小物块质量的15倍,重力加速度大小g取10m/s2.求(1)木板与地面间的动摩擦因数μ1及小物块与木板间的动摩擦因数μ2;(2)木板的最小长度;(3)木板右端离墙壁的最终距离。
一、知识总结1.模型特点:滑块放置于木板上,木板放置于水平桌面或地面上。
2.以地面为参考系的位移关系:滑块由木板一端运动到另一端的过程中,滑块和木板同向运动时,位移之差Δx=x1-x2=L(或Δx=x2-x1=L);滑块和木板反向运动时,位移之和Δx=x2+x1=L。
3.分析滑块—木板模型时要抓住一个转折和两个关联4.解决滑块—木板模型中速度临界问题的思维模板5.解决滑块—木板模型中计算问题常用工具——两图四明确。
(1)画运动过程示意图通过审题、分析与计算,画运动过程示意图,明确各运动过程的时间与位移及位移间关系、明确各时刻的空间位置、速度及速度大小关系。
(2)画速度-时间图像通过审题、分析与计算,结合运动过程示意图,画v-t图像,明确图像与坐标轴围成的面积对应运动过程示意图中的哪段位移,明确图像拐点对应运动过程示意图中哪个位置和时刻及瞬时速度。
如果已给出了v-t图像,要能够从图像中获取关键的已知数据。
二、精选例题(多选)例1.如图甲所示,物块A叠放在木板B上,且均处于静止状态,已知水平地面光滑,A、B间的动摩擦因数μ=0.2.现对A施加一水平向右的拉力F,测得B的加速度a与拉力F的关系如图乙所示,下列说法正确的是(设最大静摩擦力等于滑动摩擦力,取g=10m/s2)()A.当F<24N时,A、B都相对地面静止B.当F>24N时,A相对B发生滑动C.A的质量为4kgD.B的质量为2kg例2.如图(a)所示,与长木板质量相等的小铁块位于长木板的最左端,t=0时刻开始二者以v0=8m/s的初速度一起向右运动,t=0.5s时长木板与右侧的挡板相碰(碰撞时间极短),碰撞之前的运动过程中小铁块与长木板通过锁定装置锁定,碰撞前瞬间解除锁定,碰撞过程中没有能量损失,长木板运动的部分速度﹣时间图像如图(b)所示,在运动过程中小铁块刚好没有从长木板上滑下。
化学计量学
第一章 绪 论化学计量学是数学和统计学、化学及计算机科学三者相互交叉而形成的一门边缘学科,是化学中很具有魅力和应用前景十分广泛的新兴分支学科。
1.按照国际化学计量学学会(ICS )的定义:化学计量学是化学的一门分支学科。
它应用数学和统计学方法,设计或选择最优量测程序和实验方法,并通过解析化学量测数据而获取最大限度的信息。
2.化学计量学发展简史1971年,瑞典化学家Wold S. 在为一项基金项目定名时,从“化学数据分析”、“化学中的计算机”和化学计量学三者中选定后者而正式宣布了化学计量学这们学科的诞生。
三年后,他与美国华盛顿大学的Kowalski B. R.教授在美国西雅图成立了国际化学计量学学会。
80年代,化学计量学课程开始进入化学教学大纲,化学计量学期刊问世。
90年代后,化学计量学得到广泛推广与应用。
3、化学计量学算法和程序化学计量学的精髓主要体现在处理数据的诸多算法。
根据算法写出具体的计算机程序。
理论 上任何高级计算机语言都可以编写计量学程序。
如B 语言、C 语言Fortran 语言、Matlab 等。
第二章 实验数据统计处理一、分析测试中的误差1、 系统误差:在一定的实验条件下,有某个或某些恒定的因素按照确定的一个方向起作用所引起的多次测量平均值对真实值的偏差。
特点:A . 重复出现 B. 单向性 C. 系统误差的数值基本恒定不变2、偶然误差:由随机因素引起的误差。
特点:A. 不确定性 B. 可抵偿性3、粗差:过失误差。
二、样本的特征数均数 反映准确度标准差 反映精密度相对标准偏差 三、t 统计检验见p61相关习题见练习本次数愈多,置信限越小,平均值越可靠四.F 统计检验见p63n x x n i i ∑=1)(2--=∑n x x s i %100xs RSD =第三章 回归分析一、 两变量间的关系① 二变量均为非随机变量 --------- 函数② 一变量为非随机变量,另一变量为随机 -------- 回归③ 二变量均为随机 --------- 相关回归方程的稳定性1.回归系数b 的波动xx b sx x ss =-=∑2)(x 的离散越大,就越稳定2.常数项a 的波动xx a x n s s 21+=a s 除了与s 、xx 有关外,n 越大,a 的精度就越高。
从时空GIS视野来定量分析人类行为的思考_萧世伦

9 卷第 6 期 第3
萧世伦等 : 从时空 G I S 视野来定量分析人类行为的思考
网络出版时间:2014-06-09 10:06
V o l . 3 9N o . 6 J u n e2 0 1 4
文章编号 : ( ) 1 6 7 1 8 8 6 0 2 0 1 4 0 6 0 6 6 7 0 4
从时空 犌 犐 犛 视野来定量分析人类行为的思考
2 2 萧世伦1, 方志祥 田纳西州诺克斯维尔市 , 1 美国田纳西大学地理系 , 3 7 9 9 6 0 9 2 5 湖北 武汉 , 2 武汉大学测绘遥感信息工程国家重点实验室 , 4 3 0 0 7 9
] 1 律分布 、 对数正 态 分 布 、 双 峰 分 布 等[ , 典型的人 [ ] 1
类行为时间特性定量化建模方法包括队列模型理 记 忆、 兴 趣、 节 律 模 型、 社会交互影响模型 论、
1] 等[ 。 这些模型比较关注人类行为时间方面的统
忽略停留期间的行为 3. 2 关注移动行为 , 动态网络等的影响 , 很多的人类 受交通环境 、
建模 近年来的人类行 为 时 间 与 空 间 特 征 的 分 析 、 与统计等方面的 研 究 进 展 , 并对人类动力学研究 做了积极的展望 。 大数据时代的来临为人类行为的定量化分析 研究带来了机遇与挑战 。 如海量的人 类 轨迹跟踪 数据为了解人类在高动态多尺度时空环境下的运 包括周期性 、 相似性等 ) 提供了非常好的数 动规律 ( 据源基础 , 但是针对大数据时代的人类行为研究需 要明确几个问题 : 大数据能够解决哪些人类行为研 究问题?什么规模的数据能够回答 哪类 人类行 为 研究问题?大数据时代的人类行为 研究 方法需 要 做什么创新?这几个问题还处于探索阶段 。 面向大数据建模 与 分 析 需 求 , 时空 G I S是近 些年来发展的 G 偏重 I S 理 论 与 方 法 的 研 究 方 向, 时间与空间的集成建模 、 表达与分析 , 为理解人类 行为和 现 实 时 空 现 象 提 供 基 础 方 法 支 撑 。 M i l l e r 在G I S 平台上实现了时间地理理论 框 架的时 空锥 等 基 本 概 念 , 说明了时空 G I S 的 可 行 性。 S h a w等
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
计算时间与空间关系的定量分析
时间是什么,是连续地流动,还是跳动的,它与空间究竟什么关系?为了深入浅出,看看物理学家们的观点:“宇宙的时间和空间可能共同形成一个在尺度上
有限而没有如何边界或边缘的四维面。
……时空就像地球的表面……地球的表面积是有限的但它没有任何边界或边缘。
”、“所谓虚时间是真正的实时间,我们叫做实时间的东西恰恰是之虚乌有的空想的产物”、“宇宙的物质是由正能量构成的,引力场具有负能量,这个负的引力能刚好抵消了物质所代表的正能量,所以宇宙的总能量为零。
”这些深奥的理论我们无需去搞得很清楚,如同电脑我们不必搞
清其原理一样,只要会操作就行。
了解时间从不以人的意志或感觉为转移的真谛,时间永远按照自己的节奏向
前奔走,从不为谁停留或加速。
但是时间会影响人的投资情绪,时间还会影响成交量及管理层的思路。
因为时间是无处不在,无时不有。
时间是不以人的意志为转移的,30年河东30年河西,就是这个道理。
物质可以变精神,精神可以变物质。
爱因斯坦的E=mc×c公式中揭示了质量和能量的转换关系,那么时间和空
间能不能转换呢?股评中的“以时间换空间”或“以空间换时间”的说法已提到时
间和空间转换现象。
美国经45年的努力最近还发射了“引力探测器B”,验证时
空结构像一张平坦的床单,地球像保龄球放入而凹陷下去的“短程线效应”,进一步证实爱因斯坦的时空偏转和时空弯曲原理。
空间的调整比率大家已很熟练,时间的调整也是按黄金倍率调整的。
如果用
时空面积法统一考虑,就可把“以时间换空间”或“以空间换时间”的定性分析演化为定量分析。
公式为:下跌时的a2(时)×b2(空)(单位:年元、周元、天元或年点、周点、
天点等)/上升时的a1(时)×b1(空)(单位:年元、周元、天元或年点、周点、天
点等)=L(黄金分割率)。
――式(1),也可以公式S2(下跌)/S1(上升)=L(黄金分割率)。
――式(2)来表示。
因为实际走势是曲线,考虑两者的比例,都可用直线代替曲线而使比例不与原来曲线围成图形的比例相差太大;又因为三角形面积=底×高×0.5,两者相除,0.5与0.5也抵消掉了。
式(1)可简化为a2(时)×b2(空)÷a1(时)×b1(空)=L――式(3)
a2(时)=L×a1(时)×b1(空)÷b2(空)―――式(4)
b2(空)=L×a1(时)×b1(空)÷a2(时)―――式(5)
从式(3)可看出,如L保持不变,以“时间换空间”的方式调整,a2(时)拉长,b2(空)可变小;相反a2(时)减小,势必要拓宽下跌空间b2(空),即“以空间换时间”。
譬如2003年1311~1649~1307点,形成两个直角三角形。
用式(3)计算如下;
(1649-1307)×139天÷(1649-1311)×65天=47538÷21970=2..163≈2..191
假如时间倒退到去年的11月3日的1340点,问底部多少,大概何时到达?
用a2(时)=140天,b2(空)=(1649-1320)试代入式(4)
a2(时)=2.161×65×338÷(1649-1320)=144天
用140天试代入式(5)b2(空)=2.161×65×338÷140天=339.1,1649-339.1=1309.87。
这样可测试在离1649点第140天~144天附近有一个底部性质的点位1309点出现,实际是第139天的1307点。
预测与实际相差不多了。
再譬如宝钢从20030929(2003.6667)的5.19元~20040107(2004.0194)的8.06元,跌到20040511(2004.3333)的6.01元,问时空到位没有?如单就空间而言(8.06-5.19)/(8.09-6.01)=0.714,0.714离0.764还有一段下跌,要到8.06-(8.06-5.19)×0.764=5.86元。
观察时间比率:
(2004.3333-2004.0194)÷(2004.0194-2003.6667)=0.3139年÷0.3527年=0.8899,超过了0.809。
如用a2(时)×b2(空)÷a1(时)×b1(空)=L―――式(3)计算:(2.05元×0.3139年)÷(2.87元×0.3527年)=0.6357≈0.618。
发现空间的不到位可用时间来弥补,即“以时间换空间”。
用同样的方法可匡算大盘,如下周不破1526点,那么下调时间需延长到5月25日~6月1日(我也向罗杰斯学习“调整4~16个月”的说法,即0.5或0.618两个,给自己有一个退路,因为他的“附近”误差是一年,)。
如创1483或更低的1420点,那么调整时间可以缩短,即“以时间换空间”。
“时空面积法”还可用于实体经济。
譬如服装店的销售量或成交资金,就相当于成交量,同样可用上述方法匡算。
在寻找高深基础理论与实用科学的最佳结合点,(没有相对理论就造不出原子
弹!)“时空面积法”就是一种尝试,肯定有不完善的地方。
希望大家共同探索,发扬集体智慧,寻找更简单的方法,为丰富虚拟数量经济理论多作贡献,为我们和我们的后辈积累一些思路,而不仅仅是金钱。
爱因斯坦、牛顿他们都不是百万富翁,但他们思路及理论已经超过金钱的价值。