Baccini报警信息
Baccini报警信息.
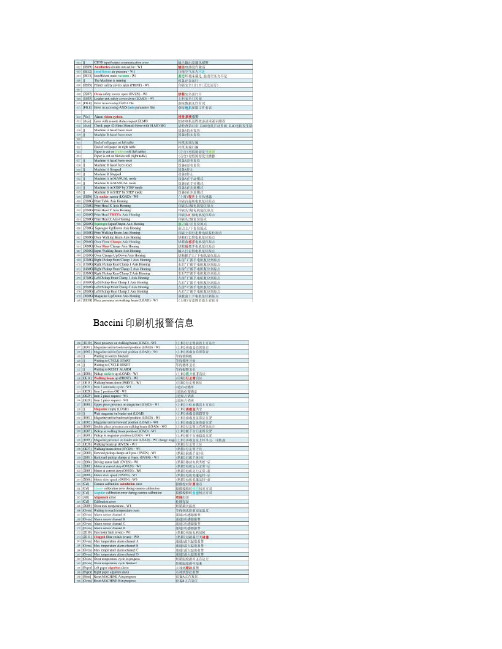
Baccini印刷机报警信息Elmo Driver NON OPERATIONALPower supply under voltageElmo电机驱动没有动作报警供电电压低于所需电压0" 1"2" Power supply over voltage3" Motor short circuit4" Amplifier overheating5" Motor failure6" Current limit (LC7" Stack overflow or CPU exception8" Stopped by a limit switch9" Main encoder error10" Auxiliary encoder error11" The peak current has been exceeded12" External inhibit13" Digital hardware failure14" Digital hall sensor15" Speed error exceeded16" Position error exceeded17" Inconsistent database18" Life guarding failure19" Failed to find electrical zero20" Speed limit exceeded21" Position limit exceeded22" Cannot tune the current offsets23" Time-out PDO2 message",PDO224" Motor hardware fault25" Position positive limit exceeded26" Position negative limit exceeded27" Wait axis in position window28" CAN communication error29"Error PDO2 message code供电电压高于所需电压电机短路放大器过热电机故障电流受限堆栈溢出或CPU异常限压停止主编码器错误辅助编码器错误超过峰值电流外围受限数字硬件故障数字化霍尔传感器超速超过位置误差数据库数据记录不统一生命保卫失效查找电气零点失败超速超出限位不能调动目前的偏差信息输出超时电机硬件故障正向限位超出反向限位超出等待电机在复位原点位置窗口CAN通讯错误PDO2错误信息代码错误。
意大利BACCINI丝网印刷机常见故障分析及解决方案
故障及处理方法
� 5、堵网
原因:有干的浆料将本该漏印浆料的地方堵起来了。 解决方法:选择“ 先刮浆料后印刷” 的印刷方式,将印 刷头停在靠近自己的地方,按下 F5 键向上抬起网版,使 用带酒精的抹布将堵网的地方擦干净即可。 原因:印刷参数不正确、 印刷台面太脏,造成摄像头 进行待印刷硅片位置校正产生错误。(感应器脏) 解决方法:调整印刷参数,即印刷的纵横轴的大小, 即转角的度数。更换印刷台面的纸张。
� 5、Alarm Vision System
意思:摄像系统有一个报警信息。 原因:通常是在旋转台面的上料台和下料台有破碎的硅 片,或者待印刷的硅片放置位置超过了摄像头的感觉范围。 解决方法:如果是上料或者下料台面有碎片的话,请将 碎片清理掉,并消除报警对话框即可。
报警信息及处理方法
� 6、Wafer Presence after Flip-over
� 2 、Check Page 42-Elmo Manual error with Elmo
MG 10 Motor Failure Code:100H; 16 Position error
意思:查看42- Elmo Axis Manual Command 的错误信 息, 10 号电机出现错误。错误代码为 100H ; 16 位置错误 并产生了越位。 解决方法:对 10号电机进行复位即可。
丝网印刷常见 故障、报警 及处理方法
故障及处理方法
第一道印刷机:
� 1、电机越位
典 型 的 报 警 信 息 为 : 26 position negative limit exceeded 解决方法:对相应得电机进行复位即可。
� 2、漏浆
检查方法:查看四个台面同一位置是否有浆料 解决方法:根据在硅片上漏浆的位置,确定网版漏 浆的位置,查看网版漏浆洞的大小,如果漏洞不大, 选择合适的胶带在网版下面将漏浆的位置粘住,试做 一片,查看是否仍然漏浆,如果仍然漏浆,重新修 补,如果不漏,可以继续使用。如果漏洞太大,无法 用胶带修补的话,更换网版。
呼吸机常见报警和解除--高丽娟
中度报警指示:可能危及生命的情况, 声音柔呾, 如
有光报警则为黄色
低度报警指示:为丌危及生命的情况, 声音柔呾, 丌连续
主要信息
原因分析
处理方案
报警屏幕
PB840
纽邦
德尔格
英文缩略词
呼吸机三要素:压力、容量(流量)、时间
P Pressure 表示压力
V Volume 表示容量:潮气量VT 、分钟通气量VE
呼吸回路原因
气管插管:堵塞、插入一侧肺 管路:积水、打折 参数设过滤器:堵塞
呼吸机原因
设置:潮气量、流速、PEEP过大 报警设置:报警限设置过低
高压报警-警示的意义
气压伤 病情变化 通气丌足
高压报警的设置
一般设置:
比吸气峰压高10cmH2O 成人40~45cmH2O, 小儿30~35cmH2O太大可导致气压伤,容控时常设置于高于
高容量报警
高容量报警
患者原因
自主呼吸过强、深大呼吸 焦虑、疼痛、体温上升、躁动、身体移动等
处理:调节参数,镇静等对因治疗
呼吸回路原因
雾化 流量传感器失灵 处理:处理故障(SST检测等)
呼吸机原因
参数设置:潮气量、吸气压力、压力支持 设置过大 报警设置:报警限设置过低
处理:调节参数
气管插管 支气管痉挛
呼吸系统顺应性
肺实质 胸膜腔 胸廓 肺容积
气道高压报警
气道阻力
气管插管 支气管痉挛
呼吸系统顺应性
肺实质 胸膜腔 胸廓 肺容积
气道高压报警
气道阻力
气管插管 支气管痉挛
呼吸系统顺应性
肺实质 胸膜腔 胸廓 肺容积
呼吸回路不呼吸机原因
报警信息

报警信息的一般结构报警信息由以下几部分构成:(1)报警代码:这是在机器软件程序源代码中建造者用来标记报警信息的累计数字。
对操作人员来讲一般没有用处,只有当Baccini的设备人员被要求提供帮助的时候使用。
(2)报警类型(不是对所有的报警):这部分信息包括在一中括号中,并能够显示报警发生在什么地方(如印刷头,烘干炉等等)或者报警发生在什么装置或者与哪一个功能相关(如输入-输出,纸,校准等等)。
(3)项目:这部分信息也包括在一中括号中,并能显示是哪一个项目,在机械上,电子上或者气动装置上等,并包含报警信息来源于哪个部分的详细描述。
(4)描述:这部分信息主要是机器不运行的解释与说明。
(5)期望的状态(只对输入信号相关的报警):这部分信息主要显示输入信号的状态应该是什么。
有两种可能的状态:----------W0(等待为0状态):输入信号状态为高电位,但是期望值是低电位;---------- W1(等待为1状态):输入信号状态为低电位,但是期望值是高电位;一般的报警信息:这种报警信息主要与主电源,外部空气压力和外部主真空相关,这些条件都是使机器正常运转所必需的条件,一般来讲会出现以下报警信息:(1)001 [0E09] [01] Aux. Circuits not anctive —W1这个信息表明机器的辅助设施丢失。
它意味着提供给马达的电源没有满足要求(一般为24V)。
在电子图表中P2是低的,0E09输入信号也是太低,因此,马达和条件输出信号不能正常工作。
相反,非条件输出信号和编码器应该正常工作。
这种报警信息经常发生在开启机器时或者按下紧急按钮时。
解决方法:拔出机器上所有的紧急按钮,按下操作台面上的绿色辅助按钮并检查输入信号0E09输入信号是出现高电位。
(2)003 [printer] [01] Machine A hasn’t been reset.这个报警信息意思是自从机器打开以来,机器A的全面复位程序还没有执行,即机器A没有复位解决方法:①确保空气压力和真空正常;②拔出所有的紧急按钮;③按下绿色的辅助设施启动按钮(auxiliaries button);④使设备处于自动状态;⑤按下绿色复位按钮,复位程序开始;⑥等待直到复位程序结束(绿色的复位按钮不再闪烁,且处于稳定)。
血液透析过程中机器常见报警原因分析及处理-图文

氯化钠
氯化钾
氯化钙
氯化镁
葡萄糖
电导度报警的原因
A.浓缩液型号或浓缩成分不正确B.使用桶装浓缩液时发生吸液管阻塞、漏气 或吸入过多空气C.水流量不足或水压过低、透析用水不达标D.报警线设置过高或过低、电导度测试系统故障E.透析机器的浓度配比系统故障F.机器消毒、脱钙、冲洗不彻底
常见报警类型
静脉压报警
漏血报警
7
一、电导度报警
电导度(conductivity)是指透析液的导电性由于钠离子在透析液中占绝大部分,故电导度可反映钠离子的浓度钠离子的正常浓度范围是135~145mmol/L,一般波动范围超过3%~5%,就会引起电导度报警。
一、电导度报警
透析液
透析用水(反渗水)
四、静脉压报警
静脉压是指血液从透析器内流出返回至患者静脉血管内的压力,标准透析时,静脉压一般波动于6.67~13.3KPA(50~100mmHg)静脉压取决于泵速与血液回流通道的阻力静脉压的测量位置在血泵后,故正常情况下为 正值
四、静脉压报警
静脉压过高的原因
A.静脉穿刺处发生肿胀/针尖斜面贴壁/针尖堵塞B.静脉管路受阻C.患者静脉狭窄、硬化、受压D.静脉壶堵塞
六、空气报警
空气检测就是防止空气进入血液的防护系统。建立在超声波传递原理基础上的。
空气报警的原因
大量空气进入血路动脉压低产生气泡透液气泡进入血中静脉壶的液面过低静脉管路与超声探头之间有空隙
空气报警预防
预冲时要将透析器内的空气排净静脉壶的液面的高度应在静脉壶的2/3~3/4处管路的连接要紧密、内瘘穿刺针要固定好输液完毕要及时关闭夹子血流不足时要及时减慢血流或动脉穿刺针的位置
静脉压过高的预防和处理
丝网印刷
丝网印刷培训丝网印刷相关定义丝网印刷就是利用丝网印版图文部分网孔透油墨,非图文部分网孔不透墨的基本原理进行印刷。
通常丝网由尼龙、聚酯、丝绸或金属网制作而成。
目前我们公司使用的网版采用不锈钢丝网作为绷网的网布材料。
当承印物(硅片)直接放在带有模版的丝网下面时,丝网印刷浆料在刮刀的挤压下穿过丝网中间的网孔,印刷到承印物上。
丝网上的模版把一部分丝网小孔封住使得颜料不能穿过丝网,而只有图像部分能穿过,因此在承印物上只有图像部位有印迹。
丝网印刷的目的丝网印刷主要目的:在形成pn结和镀膜后的硅片的两面印刷正负电极和背场。
印刷基本的要求是保证印刷图形的完整和对称,印迹饱满。
丝网印刷的原理丝网印刷是把金属导体浆料按照所设计的图形通过刮条挤压丝网弹性形变后漏印在已扩散好杂质、镀膜后的硅片正面、背面,然后在适当的气氛下通过高温烧结,使浆料中的有机溶剂挥发,金属颗粒与硅片表面形成牢固的硅合金,与硅片形成良好的欧姆接触,从而形成太阳电池的上下电极。
正面栅线的作用正面栅线由两部分构成,主栅线是直接接到电池外部引线的较粗部分,细栅线则是为了将电流收集起来传递到主线去的较细部分。
背面电极电场的作用1.背铝作为背电场能够阻挡电子的移动,减小了表面的复合率,有利于载流子的吸收;2.减少光穿透硅片,增强对长波的吸收;3.Al吸杂,形成重掺杂,提高少子寿命;4.铝的导电性能良好,金属电阻小,而且铝的熔点相对其他的合适金属来说熔点低,在烧结当中更有力。
丝网印刷的顺序wafer、背电极印刷、1号烘箱、背电场印刷、2号烘箱、正电极印刷、烧结、测试分选、入库丝网印刷设备厂家丝网印刷设备厂家较多,各家设备成膜的原理不尽相同,主要是ASYS、Baccini等。
国内中电48所等单位也在生产,但自动化程度差别很大。
印刷系统组成:传输装置、印刷装置、软件、辅料系统界面Enable magazine loader 使片子能从载片盒中传出:只第一道印刷机具有此项功能,点击选中则使push-bar将片子从载片盒中吸出上料Enable printing 使印刷机能够印刷Enable wafer alignment 保证硅片位置正确Enable screen Alignment 保证网板位置正确Enable Flip-over 执行翻转:只在第二道使用,将片子翻转Enable Oven Heating 使烘箱加热Enable Bypass Oven 使直接通过烘箱Check Breakage Before 印刷之前检查片子是否完好Check Breakage After 印刷之后检查片子是否完好Confirm 确定Restore 恢复Exit 退出印刷界面Print Type: Alternate squeegee 单程印刷:刮刀向前运动印刷一片片子,向后返回印刷下一片;Double squeegee 两次印刷:对每一块片子向前印刷一次,再向后印刷一次;Squeegee and Flood 印刷后回料;Flood and squeegee 回料后印刷。
baccini分类检测操作规程
1.目的:确保BACCINI分类检测处于良好的运行状态。
2.范围:BACCINI分类检测的使用。
3.职责:本过程由设备人员负责并执行日常维护保养;设备工程师做定期维护与保养并做记录。
4.作业内容:4.1开机步骤:4.1.1打开压缩空气手动阀,检查压力范围在0.5~0.7 MPa之间。
4.1.2打开真空手动阀,检查真空度在-0.06~-0.08 MPa之间。
4.1.3关闭所有的门使门锁到位,确认红色急停按钮拉出。
4.1.4打开设备黑色电源开关,等待计算机和Baccini程序自动运行。
4.1.5程序运行后,按下Auxiliaries辅助开关,会有闪光提示。
4.1.6确认模式选择旋钮为自动(Auto)状态。
4.1.7根据生产不同的硅片,调用相应型号的工艺文件。
如:125硅片为“Test125X125.dat”。
4.1.8再按下Cycle reset按钮使机器复位(其灯一直闪烁,直到复位结束)。
4.1.9 Cycle Start按钮指示灯闪烁,提示复位结束;等待Berger测试系统能正常工作后,按下Cycle Start按钮进行生产。
4.1.10按下Berger 计算机和显示器电源按钮。
4.1.11旋开氙灯电源箱红色停机按钮,按下电源绿色启动按钮。
4.1.12 Berger计算机系统启动后, 双击运行SCLoad测试程序。
4.1.13确认分类文件,校正光强后即可自动运行。
4.1.14校正光强时应调整 Flash 使光强功率在950~1050W之间,尽量接近1000W。
4.1.15分类文件中必须有一个类别为TRASH, 其不需设任何条件,但需分配一个分检盒。
4.2.关机步骤:4.2.1确定行走臂上的片子走完,按下Cycle Stop按钮,设备停止运行。
4.2..2退出 SCLoad 程序。
4.2.3关闭Berger计算机系统和显示器电源。
4.2.4关闭测试灯电源,直接将红色停机按钮按下。
4.2.5按下面板上红色急停按钮。
baccini报警系数解释
Table 37:发动机自动关闭原因Table 38:伺服驱动故障报告详述品质: 类型: 状况报告,整型,位域范围: 程序,RS232/RS485,CANopen限制: 无单元模块: 所有例子:MF的3000H报告表明发动机因为欠电压而被切断;当报告MF时,欠电压条件就不存在了;也许大功率消耗和高的电源补给输出阻抗是造成欠电压的原因;在这种情况下,当关闭发动机时,大功率消耗停止和电源补给回到正常值;EC=Error Code目的:报告最后一次所接受的命令的处理情况;如果最后一次的命令成功执行;EC返回值0;如果最后一次的命令执行失败,EC返回一个错误代码;注意:当执行命令失败,立刻用一个回应那个命令的问题标记返回一个错误代码;这个代码是二进制的,所以也许观察它不容易;对设计者的智能终端不能可靠的运用错误代码;这个因为设计者产生一个和伺服驱动器连续的通讯;返回的错误代码可能反映了最后一次设计者命令的情况,不是最后一次智能终端命令的情况;下面的表格仅仅反映错误代码,它是由错误代码命令反映的;例如错误代码不能返回7,8,9;7,8,9代码和许多其他值向错误赋值,那不能由一个ASCII翻译器命令产生的;在设计上提到的错误代码9是一个被遗漏的通讯超出限度的CAN信息;这个错误代码将仅仅出现在CAN 紧急目标中;44,59,63值在ASCII属性中代表“,”,“:”和“”不会用作错误代码通讯,因为这些值的字节在RS-485通讯中作为分隔符使用;下面的表格总结了Metronome错误代码:表14:进程错误代码品质: 类型: 状况报告,整型,位域范围: 程序,RS232/RS485,CANopen限制: 无单元模块: 所有紧急对象的使用紧急信息在设备内部出现严重错误的情况下触发,由错误相关的应用设备以最高的优先级向其它设备发送;这是它们适合错误警告中断机制;通过CANopen Communication Profile定义紧急错误代码表7-1,错误寄存器表10-14和其它设备专用信息,在设备资料中详细指定紧急情况;11紧急状态紧急情况是COB 80至ff紧急对象使用在9-38页的2中定义生产商专有的紧急信息结构是:错误相关的紧急代码当出现以下情况时伺服器会发出紧急代码:- 由电动机故障引起的运转停止- CPU出现严重错误- 通讯故障下表详述了属于故障问题的紧急对象emergency object:3 A lost SYNC不是丢失的信息,而是无法精确确定同步的信息;参见下文有关SYNC的部分;表11-1 紧急代码注意:CAN_MESSAGE_LOST紧急代码可能表示一种由于CAN信息没有及时被检索而引起的溢出情况;进入同一缓冲区的后续讯息与尚未阅读的讯息相冲突,可能引起两者同时消失;由于在发出讯息丢失提示时某些讯息已经被发出,因此也可能会有更多未被检测到的数据丢失;CAN_MESSAGE_LOST紧急代码会提示冲突发生的位置而不会告知实际丢失的讯息数;译码器的紧急代码当程序命令无法执行时译码器会发布紧急代码:- 命令无法理解不存在命令XX- 命令格式不当data length=5- 在当前范围无法执行命令在监视器OFF状态执行BG命令- 命令含有超出范围的系数或参数;所有由译码器产生的紧急错误代码是Error code=0x620和error register=0x20电动机故障的紧急代码下表列出了与电动机故障有关的紧急错误码;请参考6中MF命令;表11-3 电动机故障紧急代码PVT/PT运转的相关紧急代码在PVT/PT运转过程中,伺服器可能会发出紧急讯号来标明错误,或发出紧急数据需求以防止数据列下溢;请参考3和4;以下所有讯息的紧急错误代码是0xff00,错误寄存器是0x80。
baccini丝网电机报警信息的观看方法及其报警代码
电机报警代码
"1 Power supply under voltage",主供电电压过低
"2 Power supply over voltage",主供电电压过高
"3 Motor short circuit",马达短路
"18 Life guarding failure (CLA only)",到达使用寿命
"19 Failed to find electrical zero",不能探测到0点
"20 Speed limit exceeded",速度设置超出极限
"21 Position limiCAM table error (HAR only)",
"35 Heartbeat failure (HAR only)",
"36 Motor stuck (HAR only)",马达粘住
"37 Cannot start motor (HAR only)",不能开启马达
"38 Stack overflow (HAR only)",堆栈溢出
"9 Main encoder error (CLA only)",主编码器错误
"10 Auxiliary encoder error (CLA only)",辅助编码器错误
"11 The peak current has been exceeded",漏电保护
"12 External inhibit",马达没有电
baccini设备图解
定值
第十四页,共44页。
擠刀速度
抹刀速度
PT(BACCINI)機台介紹 : 機台操作(CĀOZUÒ)
X軸,Y軸,T角 度微調整設
定值
網版印刷(yìnshuā)高 度(間隙)值調整
擠刀上下(shàngxià) 值調整
第十五页,共44页。
擠刀平衡控制
PT(BACCINI)機台介紹 : 機台操作(CĀOZUÒ)
網版構造的四大要素 1.網目:單位面積內孔隙的數目 2.紗厚:鋼紗的厚度 3.膜厚:綠色膜的厚度 4.張力:網版的接受(jiēshòu)力 (N/cm2)
註解: 1.網目越多,代表網版越密、孔隙 越小,則出墨量越少。 2.印刷的厚度:紗厚+膜厚
第二十八页,共44页。
丝印参数调整(TIÁOZHĚNG)原那 么〔二〕
翻开两个温度探头电 源,翻开berger仪器 电源.
翻开氙灯的电源.
第三十一页,共44页。
分检开机(KĀI JĪ)操作
第三十二页,共44页。
两个(LIǍNɡ ɡÈ)温度传感器的位置及作用
上图为Pt100作用 是用来测试环境温度 (wēndù)
以以下图为片子外表 的温度(wēndù)测试传 感器.用于每个片子 的实际温度(wēndù)测 量
4.要正确调用消费工艺文件〔不同尺寸消费设备
调整另述〕。
第四十四页,共44页。
为: 3#机 2#机 1#机。
2.刚开机时烘箱温ቤተ መጻሕፍቲ ባይዱ低,会报警,可将温度报警 倾向范围加大,使机器能中止其它消费预备操作
(cāozuò)〔如校正网版、调整印刷参数等〕。温度 抵达设定值后再将其倾向范围调低〔30℃左右〕 。
3.在手动〔Manual〕方式时按F5键印刷头会直接 升到最洼位置,便于擦拭网版。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
{"001 [] CIF30 input/output communication error"}, 输入输出及通讯报警信息.{"002 [0E09] Auxiliaries circuits not activ e - W1"}, 辅助启动没被激活.{"003 [0E12] Insufficient air pressure - W1"}, 压缩空气压力不足{"004 [0E13] Insufficient main vacuum- W1"}, 真空环境未满足{"005 [] The Machine is running"}, 设备正在运行{"006 [0E05] Printer safety covers open (PRINT) - W1"}, 安全门打开(无法运行){"007 "},{"008 [2E07] Oven safety covers open (OVEN) - W1"}, 烘箱安全盖打开{"009 [1E03] Loader unit safety cover close (LOAD) - W1"}, 上料安全门关闭{"010 [FILE] Error in accessing DATA file"}, 获取数据文件有误{"011 [FILE] Error in accessing AXIS (axis parameter file)"}, 获取轴参数文件有误{"012 "},{"013 [Vis] Alarm vision system"}, 视觉系统报警{"014 [Axis] Error with remote status request ELMO"}, 报警与远程状态请求elmo{"016 [Axis] Check page 42-Elmo Manual; Error with ELMO MG "},请检查第4-2 elmo手册;检查电机{"018 [] Machine A hasn't been reset"}, 设备A无法复位{"019 [] Machine B hasn't been reset"}, 设备B无法复位{"021 End of roll paper on left table"},纸偏左{"022 End of roll paper on right table"}, 台纸偏右{"023 Paper is cut on friction roll (left table)"}, 左台纸剪切发生磨擦{"024 Paper is cut on friction roll (right table)"}, 右台纸剪切发生磨擦{"027 [] Machine A hasn't been reset"}, 设备A没有复位{"028 [] Machine B hasn't been reset"}, 设备B没有复位{"030 [] Machine A Stopped"}, 设备A停止{"031 [] Machine B Stopped"}, 设备B停止{"032 [] Machine A in MANUAL mode"}, 设备A在手动模式{"033 [] Machine B in MANUAL mode"}, 设备B在手动模式{"034 [] Machine A in STEP by STEP mode"}, 设备A在步进模式{"035 [] Machine B in STEP by STEP mode"}, 设备B在步进模式{"049 [1E06] Up sucker sensor (LOAD) - W0"}, 上料抓手上位传感器{"050 [21MG] Print Table Axis Homing"}, 旋转电机复位原点{"051 [22MG] Print Head X Axis Homing"}, 印刷头X轴复位原点{"052 [23MG] Print Head Y Axis Homing"}, 印刷头Y轴复位原点{"053 [24MG] Print Head THETA Axis Homing"}, 印刷头THETA轴复位原点{"054 [25MG] Print Head Z Axis Homing"}, 印刷头Z轴复位原点{"055 [26MG] Squeegee Input/Output Axis Homing"}, 刮刀前/后复位原点{"056 [27MG] Squeegee Up/Down Axis Homing"}, 刮刀上/下复位原点{"061 [10MG] Print Walking Beam Axis Homing"},印刷上料行走臂电机复位原点{"062 [28MG] Oven Walking Beam Axis Homing"}, 烘箱行走臂电机复位原点{"063 [29MG] Oven Front Clamps Axis Homing"}, 烘箱前抓手复位原点{"064 [30MG] Oven Rear Clamps Axis Homing"}, 烘箱后抓手复位原点{"067 [36MG] Input Walking Beam Axis Homing"}, 输入行走臂电机复位原点{"068 [31MG] Oven Clamps Up/Down Axis Homing"}, 烘箱抓手上/下电机复位原点{"069 [12MG] Right Pickup Front Clamp 1 Axis Homing"}, 电机右前抓手"1"复位到原点{"070 [13MG] Right Pickup Rear Clamp 1 Axis Homing"}, 电机右后抓手"1"复位到原点{"071 [14MG] Right Pickup Front Clamp 2 Axis Homing"}, 电机右前抓手"2"复位到原点{"072 [15MG] Right Pickup Rear Clamp 2 Axis Homing"}, 电机右后抓手"2"复位到原点{"073 [17MG] Left Pickup Front Clamp 1 Axis Homing"}, 电机左前抓手"1"复位到原点{"074 [18MG] Left Pickup Rear Clamp 1 Axis Homing"}, 电机左后抓手"1"复位到原点{"075 [19MG] Left Pickup Front Clamp 2 Axis Homing"}, 电机左前抓手"2"复位到原点{"076 [20MG] Left Pickup Rear Clamp 2 Axis Homing"}, 电机左后抓手"2"复位到原点{"079 [36MG] Magazine Up/Down Axis Homing"}, 承载盒上下复位到原点{"105 [1E10] Piece presence on walking beam (LOAD) - W1"}, 上料行走臂后短上有硅片{"106 [1E10] Piece presence on walking beam (LOAD) - W0"}, 行走臂上前短有硅片{"107 [1E01] Magazine unit in backward position (LOAD) - W1"},承载盒位置靠后{"108 [1E02] Magazine unit in forward position (LOAD) - W1"}, 承载盒位置靠前{"109 [] Waiting to screen blocked"}, 等待锁网版{"110 [] Waiting to CYCLE START"}, 等待周期开始{"111 [] Waiting to CYCLE RESET"}, 等待周期复位{"112 [] Waiting to RESET ALARM"}, 等待报警复位// {"115 [1E06] Pickup suckers up (LOAD) - W1"}, 上料吸片抓手高位{"116 [0E14] Walking beam up (PRINT) - W1"}, 行走臂高位{"117 [0E15] Walking beam down (PRINT) - W1"}, 行走臂低位{"123 [0E31] Item 2 automatic cycle - W1"}, 2道自动循环{"124 [0E28] Item 2 position OK - W1"}, 2道的位置确定{"125 [0E29] Item 2 piece request - W1"}, 2道硅片请求{"126 [0E29] Item 2 piece request - W0"} ,2道硅片请求{"127 [1E04] Upper piece presence on magazine (LOAD) - W1"},承载盒上有硅片{"128 [] Magazine empty (LOAD)"}, 上料承载盒为空{"129 [] Wait magazine on loader unit (LOAD)"}, 上料等待承载盒进装载单元{"130 [1E01] Magazine unit in backward position (LOAD) - W1"},上料承载盒在靠后位置{"131 [1E02] Magazine unit in forward position (LOAD) - W0"},上料承载盒在靠前位置{"132 [1E09] Double piece presence on walking beam (LOAD) - W0"},两片硅片在行走臂上{"133 [1E07] Pickup in walking beam position (LOAD) - W1"}, 抓手在行走臂位置{"134 [1E08] Pickup in magazine position (LOAD)- W1"}, 抓手在承载盒位置{"135 [1E05] Magazine presence on loader unit (LOAD) - W1 change magazine"},承载盒在进料单元,换盒{"145 [0E36] Walking beam up (OVEN) - W1"}, 烘箱行走臂上位{"146 [0E37] Walking beam down (OVEN) - W1"}, 烘箱行走臂下位{"148 [2E00] Forward pickup clamps at 0 pos. (OVEN) - W1"}, 烘箱前抓手在O位{"149 [2E01] Backward pickup clamps at 0 pos. (OVEN) - W1"}, 烘箱后抓手在O位{"150 [2E04] Driving motor fault (OVEN) - W1"}, 烘箱启动电机失败{"151 [2E05] Motor at correct step (OVEN) - W1"}, 烘箱电机运行正常{"152 [2E05] Motor at correct step (OVEN) - W0"}, 烘箱电机运行正常{"153 [2E06] Motor slow speed (OVEN) - W1"}, 烘箱电机低速运转{"154 [2E06] Motor slow speed (OVEN) - W0"}, 烘箱电机低速运转{"160 [Cal] Camera calibration calculation error"}, 摄像校对计算误差{"161 [Cal] Linear calibration error during camera calibration"}, 摄像线型校对有误{"162 [Cal] Angular calibration error during camera calibration"},摄像角校正有误{"163 [All] Alignment error"}, 对准有误{"164 [Cal] Calibration error"}, 较准有误{"165 [2E09] Oven max temperature - W1"}, 烘箱最大温度{"166 [Oven] Waiting to reach temperature oven"}, 等待到达烘箱设定温度{"167 [Oven] Alarm sensor channel A"}, 报警传感器A道{"168 [Oven] Alarm sensor channel B"}, 报警传感器B道{"169 [Oven] Alarm sensor channel C"}, 报警传感器C道{"170 [Oven] Alarm sensor channel D"} 报警传感器D道{"173 [2E10] Fan motor fault (oven) - W1"}, 烘箱电机风扇故障{"174 [2E11] C logged filter switch (oven) - W0"}, 过滤器开关堵塞{"184 [Oven] Max temperature alarm channel A"}, 传感器A道最大温度报警{"185 [Oven] Max temperature alarm channel B"}, 传感器B道最大温度报警{"186 [Oven] Max temperature alarm channel C"}, 传感器C道最大温度报警{"187 [Oven] Max temperature alarm channel D"}, 传感器D道最大温度报警{"192 [Oven] Oven temperature cycle in progress"}, 烘箱进行温度循环{"193 [Oven] Oven temperature cycle finished"}, 烘箱温度循环结束{"195 [Paper] Left paper algoritm alarm"}, 左台纸算法报警{"196 [Paper] Right paper algoritm alarm"}, 右台纸算法报警{"198 [Print] Reset MACCHINE A in progress"}, MACCHINE A正在复位{"199 [Oven] Reset MACCHINA B in progress"}}; MACCHINE B正在复位"0 Elmo Driver NON OPERATIONAL", 驱动板卡报警信息"1 Power supply under voltage", 供电电压低于所需电压"2 Power supply over voltage",供电电压高于所需电压"3 Motor short circuit", 电机短路"4 Amplifier overheating", 放大器过热"5 Motor failure", 电机故障"6 Current limit (LC)", 电流受限"7 Stack overflow or CPU exception", 堆栈溢出或CPU异常"8 Stopped by a limit switch", 限压停止"9 Main encoder error", 主编码器错误"10 Auxiliary encoder error", 辅助码器错误"11 The peak current has been exceeded", 超过峰值电流"12 External inhibit",外围受限"13 Digital hardware failure", 数码硬件故障"14 Digital hall sensor", 数字化霍尔传感器"15 Speed error exceeded", 超速"16 Position error exceeded", 超过位置误差"17 Inconsistent database", 数据库数据记录不统一// "18 Life guarding failure", 生命保卫失效"19 Failed to find electrical zero", 找不到零点"20 Speed limit exceeded",超速"21 Position limit exceeded", 超过位置误差"22 Cannot tune the current offsets", 不能调动目前的偏差"23 Time-out PDO2 message",PDO2 无信息输出"24 Motor hardware fault", 电机硬件故障"25 Position positive limit exceeded", 设备位置超出上限受限位置"26 Position negative limit exceeded", 设备位置超出下限受限位置"27 Wait axis in position window", 等待电机在复位原点位置窗口"28 CAN communication error", 扫描通讯错误"29 Error PDO2 message code:" pdo2讯息代码错误。