SeaBeam 1050D – 多波束测深仪
多波束在水深测量中的实际应用
多波束技术在水深测量中有广泛的实际应用。
以下是几个常见的实际应用场景:
1. 海洋测绘:多波束技术可以用于海洋测绘,获取海底地形和水深信息。
通过将多个声纳波束同时发射,接收反射回来的信号,并分析这些信号的时间延迟、幅度和方向,可以精确测量水深和绘制海底地形图。
2. 港口和航道维护:多波束技术可用于港口和航道的维护工作。
通过定期的水深测量,可以检测出港口和航道中可能存在的浅滩、障碍物或沉积物,并进行及时清理和维护,以确保船只的安全通行。
3. 水文调查和河流管理:多波束技术也可用于水文调查和河流管理。
通过测量河流、湖泊和水库等水体的水深和底质特征,可以帮助评估水资源的利用和管理,监测泥沙运移,预测洪水风险等。
4. 水下建筑和管线巡检:多波束技术可应用于水下建筑和管线的巡检和检测。
通过获取水深数据和底质信息,可以帮助寻找并评估水下建筑物、海底管道和电缆等的状态和完整性。
5. 潜水运动和水下探险:多波束技术也被应用于潜水运动和水下探险中。
通过测量水深和探测水下地形,探险者可以更好地了解水下环境,规划路线和活动,并确保安全进行潜水活动。
多波束技术的实际应用不仅限于以上几个领域,随着技术的不断发展,它在水深测量和水下探测领域将有更广泛的应用前景。
海底低质分类与多波束测深-一个多学科绘图工具
海底底质分类与多波束测深:一个多学科绘图工具广州海洋地质调查局资料处理所刘胜旋译William T. Collins James. L Galloway,Quester Tangent Corporation, Canadian Hydrographic Service,Sidney, British Columbia, Canada Department of Fisheres and Oceans,Institute of Ocean Sciences,Sidney, British Columbia, Canada近年来,多波束测深技术迅速地成为海洋调查的一个选择工具,主要原因是其能够高效地完成海底地形扫描测量。
如果多波束测深系统联合声学海底底质分类仪,那么就能够获取额外的海底信息。
本文主要介绍回声多波束测深仪和单波束海底分类仪的测量结果。
该调查由加拿大海道测绘处(Canadian Hydrographic Service)发起,多波束数据主要为1997年亚太经合组织(APEC)会议的海底安全服务。
加拿大Quester Tangent 公司借此机会利用QTC VIEW 海底底质分类仪在自然海区收集资料。
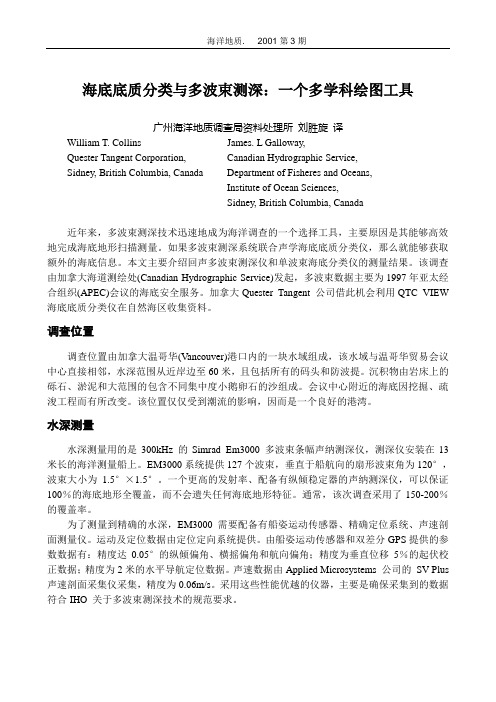
调查位置调查位置由加拿大温哥华(Vancouver)港口内的一块水域组成,该水域与温哥华贸易会议中心直接相邻,水深范围从近岸边至60米,且包括所有的码头和防波提。
沉积物由岩床上的砾石、淤泥和大范围的包含不同集中度小鹅卵石的沙组成。
会议中心附近的海底因挖掘、疏浚工程而有所改变。
该位置仅仅受到潮流的影响,因而是一个良好的港湾。
水深测量水深测量用的是300kHz 的Simrad Em3000 多波束条幅声纳测深仪,测深仪安装在13米长的海洋测量船上。
EM3000系统提供127个波束,垂直于船航向的扇形波束角为120°,波束大小为 1.5°×1.5°。
一个更高的发射率、配备有纵倾稳定器的声纳测深仪,可以保证100%的海底地形全覆盖,而不会遗失任何海底地形特征。
南方多波束测深仪测量系统-分公司
一、简介南方导航海洋产品部,致力提供完整的海洋(江河)地形地貌和海洋(江河)地质物探等专业海洋(江河)勘测设备解决方案和施工船定位定向解决方案。
目前主要产品包括:单频测深仪、双频测深仪、多波束测深仪、侧扫声纳、磁力仪、浅底层剖面仪、ADCP、智能无人船等产品。
其中地形测量设备:单(双)频测深仪、多波束测深仪(及其外围设备)、智能无人测量船(可搭载其他设备);地貌测量设备:侧扫声纳、前视声纳、3D扫描声纳;地质勘测设备:浅底层剖面仪、磁力仪;水文测量设备:ADCP、流速仪、声速仪、CTD、水位仪(潮位计)等;定位定向设备:定位定向仪施工解决方案:疏浚船解决方案、打桩船施工解决方案等下面着重介绍,多波束测深系统我们代理的是丹麦RESON公司的多波束,RESON在国内的代理还有无锡海鹰、北京美科、青岛海洋研究设备等,所以在发现意向的时候,请及时报备。
二、RESON Seabat T20-P多波束介绍SeaBatT20-P作为7101的升级产品,是海道测量界的坚强卫士,带来的是稳定性、便携性和出色性能的完美组合。
自从1995年推出以来,已交付了300多套8101/7101系统,获得了令人艳羡的声誉。
高度便携的防水声呐处理器转为小船使用设计,可用于如大坝、河流、湖泊和港口等姿态影响有限的遮蔽区域测量,获得高质量的测量数据。
这种配置有几方面优点:○无需校准,一旦安装,无需做纵横摇校准○没有繁杂的接线,安装简单、整洁○频率可调,适用范围更广应用范围:SeaBatT20-P型多波束的应用范围如下:○ 水文测量○ 搜寻水下物体,如沉船○ 海图,江图测绘○ 疏浚测绘○ 在沿海敷设电缆管线时的调查和施工控制○ 用于科研目的水深调查主要特点:SeaBatT20-P型多波束具有如下特点:○ 应用水深范围0.5—500米,从内陆水域至沿海的范围都可使用。
○SeaBatT20-P型多波束覆盖宽度可达水深的5.5倍,分辨率为512 个波束。
海洋测量技术中的多波束测深与海底地形重建方法
海洋测量技术中的多波束测深与海底地形重建方法随着人类对地球其他领域的探索需求不断增长,海洋测量技术得到了广泛的应用。
而其中,多波束测深与海底地形重建方法是一项相对成熟且常用的技术。
本文将就这一技术进行探讨。
多波束测深是一种能够准确测量海底地形的技术。
传统的单波束测深仅能获取一个点的深度信息,而多波束测深则可以同时测量多个点,从而大大提高测量效率。
多波束测深的原理是通过多个发射器和接收器组成的波束阵列,将声波发射到水下,经过反射后被接收器接收回来。
多波束测深的关键在于接收到的声波返回时的时间延迟。
通过计算声波的传播时间和速度,可以确定水下目标的距离和深度。
同时,多个接收器可以测量不同角度的回波,从而提供更全面的海底地形信息。
这种方法可以应用于测绘海底地形、沉船打捞等领域。
但是,多波束测深也存在一些挑战。
首先是数据处理的复杂程度。
每个接收器接收到的回波都需要进行处理和分析,从而得到准确的海底地形。
这涉及到大量的计算和算法,需要专业的技术人员进行处理。
其次,多波束测深的准确性也受到了水下环境的影响。
例如,水下的声速变化、水下植被以及水下地质条件等因素都会对测量结果产生一定的误差。
因此,在实际测量过程中,需要对这些因素进行充分考虑和修正。
除了多波束测深,海底地形的重建方法也是海洋测量技术中的重要环节。
海洋地质地貌丰富多样,海底地形的重建对于地质研究、海洋资源开发等领域具有重要意义。
目前,海底地形的重建主要依靠多波束测深、多声束测深、激光测深等技术,通过将不同测量数据进行融合和处理,得到准确的地形模型。
其中,多声束测深是一种通过多个声束同时发射和接收声波的技术。
与多波束测深不同的是,多声束测深可以提供更高分辨率的地形数据。
多声束测深的原理是通过只改变颗粒发射和接收声波的方向,而不改变它们的位置,从而提供更多的测量信息。
这种方法在测绘复杂地形和绘制海底地图中更为常用。
激光测深则是一种利用激光束测量海底地形的技术。
SeaDep300-便携式多波束测深系统性能测试

第 1 页 SeaDep300型便携式多波束性能测试 1系统校准与测试 首先将水下分机通过基阵安装架以船侧悬挂方式安装到测量船上,如图6所示。将水下分机连接到安装架底端法兰盘上,将安装架固定到测量船左舷预先焊接好的基座上。转接盒和测控主机安放于船舱内,将水下分机电缆接头连接到转接盒上,将转接盒通过网线和USB线连到测控主机上,如图1所示。
图1 测量船 第 2 页 图2 SeaDep300测控主机及设备转接
图3 SeaDep300多波束基阵安装照片 全部设备安装完成后,系统上电,系统工作正常。测量船在
不同水深区域进行测量,考核设备的工作状态和工作性能。航行测量过程中系统工作照片如图4所示。 第 3 页
图4 SeaDep300多波束测深系统工作照片 通过在测试过程中对各个显示窗口情况的细致考核,表明
SeaDep300多波束测深系统及测控软件工作稳定。
2 局部区域地形测量 选择一平坦区域进行多条测线的测量。该区域内的水深变化范围在10~70米之间。测量航迹图和三维地形图如图5、图5所示。
图5 测量航迹线 第 4 页 图6 三维地形图 3. 水库大坝复杂地形
使用本产品对松花湖水库大坝底部及附近地形进行测量。松花湖水库大坝的照片如图7所示
图7 松花湖大坝照片 第 5 页
沿平行松花湖水库大坝的方向进行往返共4条测线的测量,测量航迹如图8所示。 图8 大坝测量航迹图
在水库大坝测量过程中设备现场工作状况如图9、图10所示。从图中可以清晰、直观地看出,水库大坝的垂直坝体及坝体底部被“淘空”的地形。
图9 水库大坝测量现场测控界面 第 6 页
图10水库大坝测量现场测控界面 测量完成后,对4条测量线的数据进行后处理,得到大坝附近区域的三维地形图如图11所示。
图11 水库大坝、坝底及附近区域的三维地形图 从图11的三维地形图中可以清晰的看出水库大坝竖直坝体、坝体上的突起部分、大坝底部的“淘空”地形,以及大坝电站发
海底地形地貌调查多波束测深基本要求

海底地形地貌调查多波束测深基本要求一、关键词1多波束测深系统multi beam echo sounding system, MBESS由多波束测深仪及其相关外部设备(定位仪、罗经、运动传感器、表层声速计、声速剖面仪等)和数据采集和数据后处理软硬件组成的系统。
2纵倾角度pitch多波束测深系统声学换能器基准面前后倾斜的角度。
3纵倾偏差pitch offset纵倾角度的测量值与实际值的差值。
4横摇角度roll多波束测深系统声学换能器基准面左右摇摆的角度。
5横摇偏差roll offset横摇角度的测量值与实际值的差值。
6艏向偏差yaw offset多波束换能器艏向方向与罗经指向之间存在的差值。
7起伏高度heave测量船作上下升沉运动,起伏高度的变化值,也称为升沉值。
8波束接收率beam acceptance rate多波束测深仪接收波束数与设备发射波束数的百分比。
9脚印foot-print一个波束在海底照射的面积,即波束立体角与海底面的交切面。
发射波束与海底反射接收波束相交形成一系列的波束脚印(即波束在海底投射形成的斑块),它们是海底地形地貌的一组采样点,排列形成一个带状区域。
10扫幅宽度swath-width一次完整发射(Ping)波束所产生脚印在垂直龙骨方向上的累计长度,即测线两侧最远到达的距离之和。
注:同义词为覆盖宽度、条幅宽度。
11条幅重叠率swath overlap rate相邻测线间条带重叠部分的宽度与覆盖宽度的百分比。
12全覆盖测量full coverage survey多波束勘查时,波束脚印无缝衔接测量,实现调查区内各相邻测线间无测量空白,且相邻条幅重叠率达到指定要求。
二、调查目的根据任务要求实施多波束调查,获取海底地形地貌数据,通过对调查数据的校正和改正,进行数据分析、处理和成图,编绘调查区海底地形地貌图。
三、采用基准1坐标系统采用“2000国家大地坐标系(CGCS2000)”。
2高程基准采用“1985国家高程基准”,远离大陆的岛礁,高程基准采用当地平均海面。
Seabeam3012全深海多波束测深系统
Seabeam3012全深海多波束测深系统1.概述Seabeam3012是ELAC公司的最新一代深水多波束测深系统。
该系统采用先进的革命性的波束扫描专利技术,可以完全进行艏摇、纵横摇运动补偿。
Seabeam3012是唯一能进行实时全姿态运动补偿的全海洋深度多波束测深系统。
系统工作频率为12kHz,工作水深30-11000m,最大工作速度可达13节。
新的波束扫描技术包括宽覆盖、浅水近场聚焦等特性,使它的性能远超过其它常规扇区扫描发射技术。
Seabeam3012系统能够实时采集测深信息、后向散射数据、侧扫声纳图像等,并以良好的视觉形式将测量结果呈现在操作员面前。
在海底构造研究领域、海地底流研究、海洋资源探测、地球物理探测等具有极高的应用价值。
2.系统结构Seabeam3012全海深多波束测深系统由船底安装发射换能器阵、船底安装接收水听器阵、接线盒、接收、发射控制单元、数据采集工作站以及辅助设备等组成,见下图。
SeaBeam3012多波束主系统结构示意图3. 系统主要技术性能参数表参数指标频率12kHz测量水深范围30~11000m波束个数单条幅:301个(等角模式),497个(等距模式)双条幅:602个(等角模式),994个(等距模式)波束覆盖宽度140︒(自动),150︒(手动)波束发射方式采用波束扫描技术,确保海底脚印平行有序侧扫12位分辩率,最大2000pixel平均脚印分辨率1︒⨯1︒,1︒⨯1.5︒,1︒⨯2︒最大工作船速13节系统工作站Windows操作系统原始数据输出CARIS后处理软件兼容系统的发射速率不小于4Hz,但受来回声程的时间限制。
环境限制Roll:± 10︒;Pitch:± 7︒;Yaw:± 5︒4.SeaBeam3012的物理尺寸参数项目高(mm)宽(mm)深(mm)重量(Kg)水听器阵(1.5︒/1︒)2225496/7680 8921650/2250发射能器阵(1︒)27677401056 3880水听器接线盒60062919120发射换能器接线盒64040913021发射控制机柜1949608858337接收控制机柜1949608858337系统工作站1000500500505.电源要求项目电压/V平均功率/W峰值功率/W接收控制单元220V(50Hz)13003500发射控制单元220V(50Hz)1200系统工作站220V(50Hz)300后处理工作站220V(50Hz)300。
水深测量及水下地形测量
熔敷金属层
压电陶瓷
TVG 多 通 道 信 号 处 理 电 路 波 束 形 成 和 控 制 电 路
外 部 存 储 电 路
数 据 采 集 电 路
多 通 道 前 置 放 大 器
换 能 器 接 收 阵 列
返回波束
电源
a
发射、接收脉冲控制信号
底部检测
波束入射角较小时,回波振幅较大,反射波的尖脉冲 特征明显,随着入射角的增大,回波振幅越来越小,尖 脉冲特征也变得越来越模糊,相位变化却愈明显,检测 精度也得到了进一步的提高。 因此,中央波束采用振幅检测,边缘波束采用相位检 测。不但提高了波束检测的精度,同时也改善了ping断面 内测量精度不均匀所造成的影响 。
波束脚印的归位问题
第一步,采用声线改正法获得波束脚印的船体坐标
设换能器在船体坐标系下的坐标为(x0 , 0 , z0),则波束脚印的 船体坐标(x,y,z)为:
z = z0 + ∑ Ci cos θ i Δti
i =1 N
x = x0 + ∑ Ci sin θ i Δti
i =1
N
第二步,实现波束脚印船体坐标向地理坐标的转换
还有一种具有广阔发展前途的测量手段,即激光测深 系统。激光光束比一般水下光源能发射至更远的距 离,其发射的方向性也大大优于声纳装置所发射的声 束。激光光束的高分辨率能获得海底传真图像,从而 可以详细调查海底地貌与海底底质。该测量属“面”状测 量。 侧扫声纳系统过去因难以给出深度而只能用于水下地 貌调查,近年来,随着水下定位等相关技术的发展以 及高分辨率测深侧扫声纳的面世,侧扫声纳也可用于 水下地形测量;该测量属“面”状测量。 同时,AUV/ROV所承载的扫测设备也逐步成为高精度 水下地形测量的一个非常有效的手段。该测量属“面”状 测量
多波束测深系统在海洋工程测量中的应用
多波束测深系统在海洋工程测量中的应用发表时间:2020-04-29T16:14:57.037Z 来源:《科学与技术》2019年第22期作者:李善粒[导读] 多波束测深系统是一种由多传感器组成的复杂系统摘要:多波束测深系统是一种由多传感器组成的复杂系统,系统自身性能、辅助传感器性能和数据处理方法,对于系统的数据采集和波束脚印的归位计算起着十分重要的作用。
本文分析了多波束测深系统在海洋工程测量中的应用。
关键词:多波束测深系统;航道疏浚;数据处理不同于单波束测深系统,多波束测深系统可在测量断面内形成十几个至上百个测深点,几百个甚至上千个回向散射强度数据,从而保证了较宽的扫幅和较高的测点密度;一、多波束水下测深系统1.多波束测深系统的组成。
多波束测深技术是现代水下探测领域的新兴技术,它集成了现代空间测控技术、声呐技术、计算机技术、信息处理技术等一系列高新技术,实现了对水下探测目标的高精度和高密度测量。
如SeaBat 8101是目前世界上最先进、精度最高的多波束测深系统之一,它主要由OCTANS光纤罗经和运动传感器、声速剖面仪、侧扫图像处理系统、多波束数据后处理系统(CARISHIPS后处理软件)、QTC Multiview底质分类系统等共同组成。
2.系统特点。
(1)SeaBat 8101以带状方式进行测量,波束连续发射和接收,测量覆盖程度高,对水下地形可100%覆盖。
与单波束比较,波束角窄,能够完全反映细微地形的变化。
单波束是点、线的反映,而多波束则是面上的整体反映。
多波束测深系统的测量成果更真实可靠,由于是全覆盖,其大量的水深点数据使等值线生成真实可靠。
而单波束是将断面数据进行摘录成图以插补方式生成等值线,在数据采集不够时,等值线会存在一定偏差。
(2)SeaBat 8101条带覆盖宽度210°,波束大小为1.5°×1.5°,波束数目为101个,测深分辨率为1.25 cm。
基于多波束测深的海洋测绘技术研究
47科技资讯 S CI EN CE & T EC HNO LO GY I NF OR MA TI ON 测 绘 工 程1 工程概况广东某港30万吨级航道工程是按照已投入使用的25万吨级航道的轴线,进一步浚深,全长54.90k m 。
外航道设计底宽310m,底标高-21.6m,边坡1∶5;内航道设计底宽310m,底标高-21.9m,边坡1∶5。
2 多波束测深系统安装测试本工程中投入SE AB AT 8101多波束系统进行测量实施。
该系统在引进后就一直都是安装在固定的测量船的固定位置上,所以系统进行使用都是整体工作的。
多波束测深系统的各部分,按设计位置进行安装,并量测DG PS 接收机天线,多束换能器、运动传感器(DMS-05)、电罗经等相对船体坐标系原点的位置关系。
量测各传感器相对船体坐标原点的偏移量,以便在数据处理进行相应的改正。
2.1电罗经传感器的安装电罗经的安装位置有着严格的要求,电罗经传感器应安装在船舶中心附近,电罗经指示方向应与船首方向一致,并且要求在船体坐标系的水平面内。
安装位置应远离导磁物质或易被磁化的物质;电罗经与较大的铁性物体、强电流的电线及电池组至少保持1.3m~1.5m的距离;一些电子设备(如计算机、电视显示器、雷达磁控管、扩音器、UPS不间断电源装置等)的使用会影响电罗经的正常工作,使其测出的方向数据失真或干忧,应远离它们。
2.2运动传感器(运动补偿仪,DMS-05)的安装运动传感器应固定安装,并尽可能与水平面平行;运动传感器离船舶重心的越远,船舶纵横倾幅度越大,产生的测量误差也越大,所以安装位置应在船舶的重心或尽可能靠近重心;运动传感器的安装具有方向性,其罩壳上的指示方向应与船艏方向一致,否则将产生反向改正,造成严重误差。
2.3多波束换能器的安装多波束换能器的安装主要取决于船型和船的结构。
同时还应考虑多波束测深系统使用的水域,如在内河测量,因受风浪的程度较小,可以安装在船首,而在潮汐河口或近海水域,因受风浪的程度较大,宜采用船舷固定安装。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SeaBeam 1050D – 多波束测深仪
的杰出性能。
aBeam 1050D
大测深达3000米 50 / 180 kHZ 双频
126 个独立波束 153°条带宽度 3000 米最大测深
超过 IHO 标准 包含侧扫功能 实时运动补偿 高声源级
杰出的旁瓣抑制 Windows 操作环境
你的双频多波束选择
SeaBeam 1050D –高性能多波束测深系统
SeaBeam 1050D 双频多波束测深仪既可在浅水又可在中等深度水域内采集水深和侧扫数据,覆盖扇区角度超过150度。
只用一台声纳处理器既可为50 kHz 换能器供电也可为180 kHz 换能器供电。
该特性在工业界是独一无二的。
它为用户提供了使用方便,只要鼠标点一下即可改变工作频率。
SeaBeam 1050D 系统以Windows NT 为平台,可在浅水和中等深度水域内完成最大深度达3000米的高分辨率测深工作。
该系统组合了SeaBeam 1180 和 SeaBeam 1050 的性能。
在商业近岸海底调查及研究领域,SeaBeam 1050D 已成为工业标准。
SeaBeam 1050D
在浅水和中等深度水 域内
Se
最的专业多波束测量
SeaBeam 1050D – 多波束测深仪
技术指标
频率 50 kHz 180 kHz
波束个数 126 126
波束宽度 153° 153°
电源 115 / 230 V AC 115 / 230 V AC
最大脉冲功率 每个换能器阵3.5 kW 每个换能器阵500 W
最大声源级 234 dB 1 μPa/1 m 220 dB 1 μPa/1 m
脉冲长度 0.3,1,3,1.0 ms 可选 0.15,0.3,1.3 ms 可选
带宽 12 kHz,3.3 kHz,1 kHz可选 12 kHz,3 kHz,1 kHz可选 旁瓣抑制 36 dB (发射和接收) 36 dB (发射和接收)
作业速度 最大16节 最大16节
外形尺寸
声纳处理器单元(SEE 30) 尺寸 480 x 540 x 360 mm
重量 约 33 kg
换能器 (LSE 237) 尺寸 530 x 290 mm 每个
重量 60 kg
换能器 (LSE 307) 尺寸 390 x 280 mm 每个
重量 17 kg
接口和传感器
运动传感器 DMS-2, Octans, POS M/V, MRU 5
罗经 NMEA 0183 标准,HDT 语句
定位 NMEA 0183 标准,GGA 或 VTG 语句
声速 由 RS232 输入
软件 ELAC HDP 4061,CARIS,QPS,EIVA,ROXAR 等。