多波束测深系统声速校正
多波束测深系统声速改正技术

多波束测深系统声速改正技术一、序言- 引言:介绍多波束测深技术在水下测量领域的应用以及声速改正技术的重要性。
- 研究背景:简述多波束测深技术和声速改正技术的来龙去脉。
- 研究意义:阐述研究多波束测深系统声速改正技术的重要意义。
二、多波束测深系统基本原理- 多波束测深系统的构成和工作原理:简述多波束测深系统的整体结构和基本原理。
- 多波束测深系统测深原理:详细介绍在多波束测深系统中实现水深测量的基本原理。
- 多波束测深系统的工作流程:阐述多波束测深系统的工作流程,详细介绍每个环节的操作过程。
三、声速测量与改正方法- 声速的概念与测量方法:对声速的相关概念进行详细阐述,并介绍常见的声速测量方法。
- 多波束测深系统声速改正的必要性:分析多波束测深系统中声速改正的必要性和意义。
- 常用声速改正方法:介绍常用的声速改正方法,并分析各种方法的优点和缺点。
四、多波束测深系统声速改正技术研究- 基于声速测量的声速改正方法:阐述在多波束测深系统中,基于声速测量的声速改正方法。
- 基于反演法的声速改正方法:介绍在多波束测深系统中,基于反演法的声速改正方法。
- 基于神经网络的声速改正方法:介绍在多波束测深系统中,基于神经网络的声速改正方法。
五、结论与展望- 研究结论:总结本文研究的多波束测深系统声速改正技术的研究成果和结论。
- 简要讨论:简要讨论研究中发现的问题和不足之处,并提出改进意见。
- 研究展望:展望多波束测深系统声速改正技术的未来发展趋势和方向。
多波束测深系统是一种非接触性测量水深的技术,其精度高、速度快,被广泛应用于海洋、水利、地震、环境等领域。
本章将介绍多波束测深系统的基本原理及其构成,以便更好地理解多波束测深系统声速改正技术的研究。
多波束测深系统的构成和工作原理多波束测深系统由多个发射器和接收器组成,其中发射器发出多束探测信号穿过水体后被接收器接收,通过计算探测信号的往返时间和相位差来计算水深。
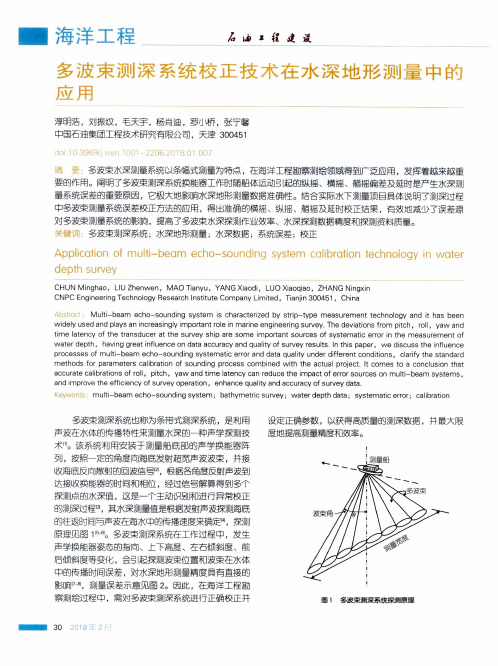
一个多波束测深系统通常有4至8个发射器和接收器,信号发送后形成梳状图案,由此形成一系列交错的光带覆盖水下被测区域,从而实现大范围、高精度、高效率的水深测量。
多波束测深系统校正技术在水深地形测量中的应用
摇
多波束测深 系统校正作业 由多个过程组成 ,包 括 声速校正 、横摇纵摇校正 、艏摇校正 、延时校正等 。
t rin e latency ot the transducer at the survey ship a re som e impo ̄ant sources of systematic error jn the measurem ent of
water depth, having great『nfluence On data accuracy and quaIity of survey results.In this paper,w e discuss the influence
本文详细介绍 了多波束 测深 系统在水深 地形测量 过程 中的系统校正 方法 ,为多波束 系统外业 测量工作 提供参考 。
在测量船上安装多波束测深系统 设备时和测量作 业过程中 ,很难保证多波束换能器基 阵中心的三坐标 轴与测量船中心的三坐标轴完全重合 ,且随船体运动 出现横摇 、纵 摇和 艏摇 (见 图 4)。因此 ,多波束测 深系统在正式工作之前 ,必须 正确 、严格地进行各项 系统参数的校正测定。需要测定的系统参数有 :横摇 偏 角 、纵 摇 偏 角 和 艏 摇偏 角 等n01。
’ 多 波束测深 系统 ;水深地形 测量 ;水深 数据 ;系统误 差 ;校 正
CHUN M inghao, LIU Zhenw en, MAO Tianyu, YANG Xiaodi, LUO Xiaoqiao, ZHANG Ningxin
CNPC Engineering Technology Research Institute Company Limited,Tianjin 300451,China
水深测量中声速改正方法分析(修改)

水深测量中声速改正方法分析杨仁辉(中交广州航道局有限公司,广州,510221)摘要:本文介绍了水深测量中声速测量的两种方法,以HY1200声速仪为例,着重介绍了声速剖面仪的原理、软件应用以及平均声速的计算方法,并且对两种方法进行了比较、分析。
关键词:测试板法;声速剖面仪;HY1200系列;平均声速;声速改正数Correction for Acoustical velocityin Echo SoundingYANG Ren—hui(CCCC Guangzhou Dredging CO.,LTD.,Guangzhou 510221)Abstract: This paper introduces the method of test board and SVP,the focus is the principle、application software and average sound velocity of HY1200SVP.Then it discusses the diffenrent of test board and SVP.Key words:test board;Sound Velocity Profiler;HY1200SVP;average sound velocity;correction of sound velocity data1.引言水深测量通常采用回声测深系统进行测量。
回声测深系统的原理非常简单,主要是以声速和声速往返时间来计算水深,即:H=V×T/2(1)其中:V为声速、T为声速往返时间。
这里,声速往返时间是由系统感知计算得到的,声速由测量人员测定,所以为了得到相对精确的测量结果,声速的测定就成为水深测量过程中非常重要的一个步骤。
对于声速的测定我们一般采用两种方法,测试板法和声速剖面仪法。
测试板法和声速剖面仪是根据两种不同的思路设计的。
下面我们简单叙述一下这两种方法是如何测定声速的。
多波束水深测量误差分析及校正 王军强
多波束水深测量误差分析及校正王军强摘要:多波束水深测量有着可靠稳定以及覆盖面广等的优点。
但多波束测深系统的声学原理以及海水具有不均匀性,声波在进行传播期间会出现线折射,而波束测点也会因此出现位置的计算不准确。
因此,本文通过分析主要的系统参数误差,进一步深究并提出对应的测定方法和完善措施。
关键词:多波束;水深测量;误差分析;校正1声速剖面误差及校正海水本身具有不均匀的性质,因此声波在传播的过程中,会受到海水盐分密度、水压以及水温等多方面影响,继而产生对应性的改变。
如声速会因海水的盐分密度、水压、水温的上升而加速,这里最密切相关的还是水温,其次是水压,再是海水盐分密度。
为了能够更好地保障多波束测深的精准性、可靠性,通常采取较多的声速剖面,进行科学合理的时间安排以及空间上的布置,有目的地适当对声速剖面的空间分布密度进行调整。
2导航定位时间延迟误差及校正2.1误差分析通常定位系统都是和测深系统同步进行的,否则就会令测深点发生偏移,进而影响所测得的海底地形正常图形,这个过程叫做定位时间延迟误差。
图1(a)、图1(b)为系统延迟效应对测深产生的影响。
图中箭头为测线航行,P为真实位置,P′为记录位置,△为位移。
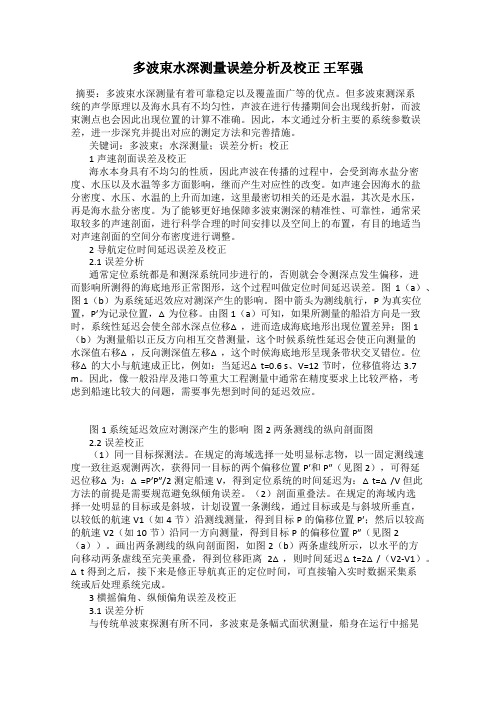
由图1(a)可知,如果所测量的船沿方向是一致时,系统性延迟会使全部水深点位移△,进而造成海底地形出现位置差异;图1(b)为测量船以正反方向相互交替测量,这个时候系统性延迟会使正向测量的水深值右移△,反向测深值左移△,这个时候海底地形呈现条带状交叉错位。
位移△的大小与航速成正比,例如:当延迟△t=0.6 s、V=12节时,位移值将达3.7 m。
因此,像一般沿岸及港口等重大工程测量中通常在精度要求上比较严格,考虑到船速比较大的问题,需要事先想到时间的延迟效应。
图1 系统延迟效应对测深产生的影响图2 两条测线的纵向剖面图2.2误差校正(1)同一目标探测法。
在规定的海域选择一处明显标志物,以一固定测线速度一致往返观测两次,获得同一目标的两个偏移位置P′和P″(见图2),可得延迟位移△为:△=P′P″/2测定船速V,得到定位系统的时间延迟为:△t=△/V但此方法的前提是需要规范避免纵倾角误差。
多波束测深系统声速改正技术

作者简介 : 郑彤 , , 女 博士 , 工程师, 研究方 向: 舰船导航与海洋地球物理 。郭薇 , 硕士 , 女, 工程师 , 研究方 向: 舰船电子武备 系统 和设备 监造 。
12 3
郑
彤等 : 多波束测深 系统声速改正技术
第 25 1 期
间或 相 位 , 而 直 接 获 得海 水 声 速 剖 面 l 。 如 前 所 述 , 波 从 6 ] 声
同一 时 间 的不 同地 点 也 不 尽相 同 l ]有 时 这 种 变 化 还 相 _ 1 ,
当大 , 尤其在河 I冲淡水 区域。因此 当进行采 集声速 剖面 L l
时, 一定 要 根 据 变 化 选 取 声 速 “ 点 ” 节 。
层2 层 1
鲁
一
对于多波束测深系统 来说 , 现场 实测的声 速剖面 往往
节、 地理 位 置 和时 间 的变 化 而 变 化 , 随着 水 团 运 动 和 层 化 的
在海水 中的传 播 速度 主要 与海 水温 度 、 度及压 力 有关 。 盐 在海洋 中的不 同深度 , 温度 、 压力也随之变化 。多波束测 深 系统依赖海水介质对声速的传播和海底的反射 和散 射。不 同的声速结构具有不 同波束旅 行路径 , 速结构 的差异 将 声 通过声线弯 曲直接影 响海底探 测精度 , 致海底 形态 的畸 导 变 。因此海水介质 的声速剖面特征和结构变化对测量及 其
海洋 中的声速是一个 比较活跃 的海 洋学变 量 , 它取 决 于介 质 中的许多 声传 播特 性 , 随季 节 、 间、 理位 置 、 时 地 水 深、 海流等 的变化 而不 同。海 水声 速的精 确求得 影响水 深 值的精度 。为获得 高精度 的水深 测量 资料 , 就必 须进行 声
海水声速对多波束测深的影响
第11卷第2期中国水运V ol.11N o.22011年2月Chi na W at er Trans port Februar y 2011收稿日期:作者简介:张清华(),男,湖南邵阳市人,中华人民共和国广东海事局海测大队工程师。
海水声速对多波束测深的影响张清华(广东海事局海测大队,广东广州510320)摘要:海水声速是多波束测深系统进行水深测量的基本参数之一,文中列出现有的7种声速经验公式,根据其各自不同的适用范围和特点,得出适合不同水层的最佳声速公式;同时,声速剖面正确与否直接影响测量结果的精度和可靠性。
声速校正为多波束测深系统提供了正确的声速剖面,根据声速剖面垂直向上的变化规律,对原始声速数据进行科学采集,最终取得合理可靠的水深值;并对声速校正进行了探讨。
关键词:声速经验公式;声速剖面;声速变率;声速校正;多波束测深系统中图分类号:P733文献标识码:A文章编号:1006-7973(2011)02-0090-03现代水深测量的手段种类繁多,声纳作为一种经典的测深方法被广泛地应用于单波束、多波束声纳水深测量中。
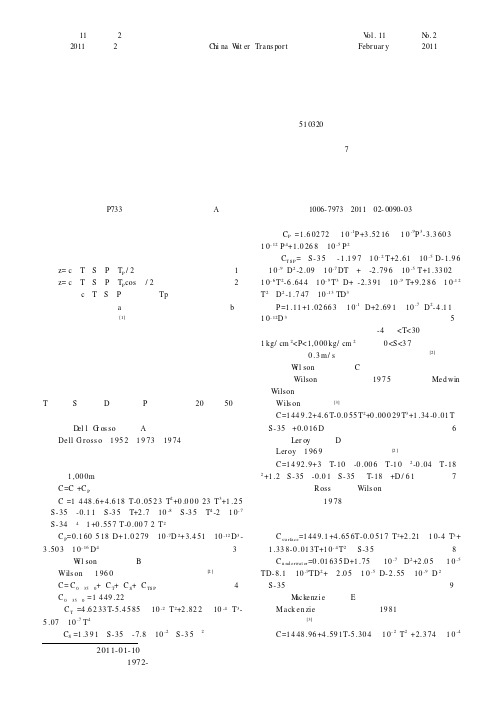
其深度的估计为:z=c (T 、S 、P )T P /2(1)z=c (T 、S 、P )T P cos θ/2(2)式中,c (T 、S 、P )为声速,Tp 为声波往返传播时间,θ为波束入射角。
式(a )为单波束深度计算公式,式(b )为多波束深度估计公式[1]。
多波束测深系统中,声速的确定通常由两种方法来实现。
一种是直接法,另一种为间接法,直接法测定声速比较客观的反映声速在特定水区、不同水层的传播特性。
间接法确定声速在水深测量中有广泛的应用,因此寻求一个适合各种情况、模型简单、计算方便,精度保证的最佳声速公式是十分必要的。
声速本身是一个重要的海水物理参数,它可表示为温度T 、盐度S 和深度D (或压力P )的函数。
从20世纪50年代起,先后提出了适用不同海况的声速经验公式。
一、D el l G r os so 公式(A 式)Dell G ross o (1952、1973、1974)对间接声速测量给出了较为精确的计算图表和经验公式,也是目前被广泛接受的声速公式,该公式简洁方便。
海测技术▏浅谈声速在多波束水深测量中的影响及对策

海测技术▏浅谈声速在多波束⽔深测量中的影响及对策多波束系统是计算机技术、导航定位技术、姿态传感技术、海⽔⽔⽂参数⾃动获取技术、图像处理技术等多项技术的⾼度集成。
根据国际海道测量规范IHO S-44 的要求,等级为特等的区域(港⼝、锚地和具有最⼩富余⽔深的相关航道)要求使⽤全覆盖扫测,对于等级为⼀等的区域(港⼝、⼊港航道、推荐航道和⽔深在100m以内的沿岸⽔域)只要求特殊⽔深进⾏全覆盖测量,现在多波束主要⽤于航道、锚地、障碍物的扫测、浅点加密以及⼀些⼤⽐例尺的⽔深测量;其中,声速是影响其测量精度的⼀项重要因素。
通常,在某⼀测区内从海⾯到海底的声速值并不⼀样,⽽是存在着不同的声速层,使声波射线发⽣弯曲,这样就与理论产⽣不⼀致;如果在平坦的区域,实际声速⼤于改正声速,多波束测得的测幅内的横断⾯⽔深图曲线两侧是向上翘,成笑脸,相反,横断⾯⽔深图曲线两侧向下压,成哭脸,从⽽产⽣⼀个深度误差和位置误差。
⼀、声速的概念及影响声速的⼏点因素⒈声速的概念单位时间内波阵⾯(等相位⾯)传播的距离为声波传播的速度,简称为声速,在海⽔中,该值⼀般在1420~1550m/s范围内,⽐空⽓中的声速快4倍多。
⒉影响声速及测量的⼏点因素由于海⽔的不均匀性和多变性,海⽔的密度和体积压缩系数是海⽔温度、盐度和静压⼒(与⽔深有关)的函数且随时间变化,因此海⽔中的声速也是温度、盐度和静压⼒的函数,由此可见,获得准确的声速数值,对⽔深测量的准确度⾄关重要。
此外,由于海⽔为⾮均匀介质,在海⽔中含有各种杂质,如海⽔中的⽓泡、悬浮物、海洋⽣物等,其中特别是海⽔中所溶解的⽓泡,对声波传播有⼀定影响;对外业测量⽽⾔,当测量船经过前边船舶航迹的尾流,或者测量船倒车时,由于多波束换能器安装不当,导致换能器下⼤量⽓泡的存在,其都能对测量⼯作造成很⼤影响,甚⾄⽆法正常⼯作。
⽬前在外业测量中,⽐较常⽤的获取海⽔中声速的⽅法主要为利⽤声速剖⾯仪直接测量。
声速剖⾯仪的⼯作原理⽐较简单,其不断发射⾼频短脉冲,当接收到前⼀个短脉冲的回波后,便⽴即发射下⼀脉冲;声速测量仪记录每秒钟脉冲的发射次数(即脉冲重复频率),再乘上每隔短脉冲在海⽔介质的已知声传播路程,即可获得海⽔介质的声传播速度。
多波束测深系统声速校正
多波束测深系统声速校正3何高文(广州海洋地质调查局二海,510760)摘要海水声速是多波束测深系统进行水深测量的基本参数之一,声速剖面正确与否直接影响测量结果的精度和可靠性。
本文阐述了声速对多波束水深测量的影响机理,并通过对南海SA 12试验区采集的声速资料的分析,以SeaBeam 2100多波束测深系统为例,对声速校正的技术方法进行了探讨。
关键词 海洋 声速校正 多波束测深 SeaBeam 2100测深系统中图分类号:P 73312 文献标识码:B前言自1994年原地矿部引进第一套多波束测深仪(SeaB eam 2100系统,安装于“海洋四号”船)以来,我国先后引进了多套深、浅水多波束测深系统,在大洋矿产资源调查和目前正在开展的近海大陆架及专属经济区的地形勘测中,发挥了巨大作用,引发了一场海底地形测量的革命,为有效地维护国家权益和即将开展的海域划界作出了很大贡献。
如何保证测量数据的精度及其可靠性,是任何测量仪器必须关注的问题,多波束测深仪也不例外。
作为一种有别于传统单波束测深仪的水深测量仪器,影响多波束测深数据的因素有很多,其中海水声速(简称“声速”)是重要的因素之一。
下面以SeaB eam 2100系统为例,探讨声速对多波束测量数据的影响以及声速校正的技术方法。
由于SeaB eam 多波束测深系统的水深测量值是根据发射声波的往返时间与声波在海水中的传播速度来确定的,因此,及时为系统提供当时当地准确的声速值是获取可靠水深测量数据的基本保证之一;此外,多波束测深系统对所输入的声速数据量有一定的限制,不同的数据取点,也将对测量结果产生影响。
与传统的单波束测深仪相比,多波束测深仪对声速的要求更为严格(见后述)。
所以,为了获得准确可靠的多波束测深数据,必须进行声速校正。
通过对南海SA 12试验区海水声速系统测量结果的研究,获得了声速变化规律的认识,从而为SeaB eam 系统的声速校正提供科学依据。
1 声速影响因素海洋中的声速是一个比较活跃的海洋学变量,它取决于介质中的许多声传播特性,随季收稿日期:2000204220第19卷 第4期2000年12月 海 洋 技 术O CEAN T ECHNOLO GY V o l 119,N o 14D ec,2000节、时间、地理位置、水深、海流等的变化而不同。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多波束测深系统声速校正3何高文(广州海洋地质调查局二海,510760)摘要海水声速是多波束测深系统进行水深测量的基本参数之一,声速剖面正确与否直接影响测量结果的精度和可靠性。
本文阐述了声速对多波束水深测量的影响机理,并通过对南海SA 12试验区采集的声速资料的分析,以SeaBeam 2100多波束测深系统为例,对声速校正的技术方法进行了探讨。
关键词 海洋 声速校正 多波束测深 SeaBeam 2100测深系统中图分类号:P 73312 文献标识码:B前言自1994年原地矿部引进第一套多波束测深仪(SeaB eam 2100系统,安装于“海洋四号”船)以来,我国先后引进了多套深、浅水多波束测深系统,在大洋矿产资源调查和目前正在开展的近海大陆架及专属经济区的地形勘测中,发挥了巨大作用,引发了一场海底地形测量的革命,为有效地维护国家权益和即将开展的海域划界作出了很大贡献。
如何保证测量数据的精度及其可靠性,是任何测量仪器必须关注的问题,多波束测深仪也不例外。
作为一种有别于传统单波束测深仪的水深测量仪器,影响多波束测深数据的因素有很多,其中海水声速(简称“声速”)是重要的因素之一。
下面以SeaB eam 2100系统为例,探讨声速对多波束测量数据的影响以及声速校正的技术方法。
由于SeaB eam 多波束测深系统的水深测量值是根据发射声波的往返时间与声波在海水中的传播速度来确定的,因此,及时为系统提供当时当地准确的声速值是获取可靠水深测量数据的基本保证之一;此外,多波束测深系统对所输入的声速数据量有一定的限制,不同的数据取点,也将对测量结果产生影响。
与传统的单波束测深仪相比,多波束测深仪对声速的要求更为严格(见后述)。
所以,为了获得准确可靠的多波束测深数据,必须进行声速校正。
通过对南海SA 12试验区海水声速系统测量结果的研究,获得了声速变化规律的认识,从而为SeaB eam 系统的声速校正提供科学依据。
1 声速影响因素海洋中的声速是一个比较活跃的海洋学变量,它取决于介质中的许多声传播特性,随季收稿日期:2000204220第19卷 第4期2000年12月 海 洋 技 术O CEAN T ECHNOLO GY V o l 119,N o 14D ec,2000节、时间、地理位置、水深、海流等的变化而不同。
图1 声波在不同声速介质中的传播图2 声线弯曲示意图一般而言,除了诸如空气泡和生物体等杂质外,影响海洋声速的物理因素主要有温度、盐度和压力。
从如下的声速计算经验公式(M edw in 公式)可以看出,声速随温度、盐度、深度(压力)的增加而增大,其中与温度的相关性最大,压力次之,盐度的影响最小。
SV =144912+416t -01055t 2+0100029t 3+(1134-0101t )×(s -35)+01016d式中:SV -声速(m s )t -温度(℃)S -盐度d -深度(m )适应条件:0≤d ≤1000m2 声速对测深值的影响机理如前所述,声波在海水中的传播速度主要与海水温度和压力有关,在海水的不同深度,温度和压力发生变化,因此,声速也各不相同。
不同的声速在海水中构成一系列声速层。
由声波的传播特性可知,声波穿过不同的声速介质时,其传播路径要发生改变,由高速介质向低速介质传播时,向法线方向折射(图1),也即遵循Snell’s 法则:V 1 co s Η=V 2 co s Χ式中:V 1:声波在介质1中的传播速度V 2:声波在介质2中的传播速度Η:入射角Χ:折射角这样,当声波非垂直入射海水时,由于穿过一系列不同的声速层,其传播轨迹实际上是一条由很多折线构成的曲线,这就是声线弯曲现象(图2)。
多波束测深系统以一定的开角发射和接收信号,声波信号在海水中是在一个扇形的范围内传播。
系统一旦完成一次声纳信号的发射和接收过程后,回波时间就可以确定下来,而最终测深值的获得,还必须依赖该信号(声波)在海水中的传播速度。
根据声速和回波时间,可以计算出声波到达海底传播路径的量程(长度),用公式表示为:量程(R )=1 2×声速(SV )×回波时间(T )最后根据发射角的不同,利用声线追踪原理,获得声波在海底的回波位置及其水深值。
由于声线弯曲现象的存在,声速值(特别是表面声速)正确与51 第4期 多波束测深系统声速校正 否,将直接影响多波束系统各个波束(尤其是外部波束)在海底的触底位置及其水深值。
声速对水深测量误差的贡献可用以下公式表示:E=D ∃CC0[1-2tan2(Α0)+2tan(Β)tan(Α0)]式中:E:由声速引起的水深误差Αo:折射角之补角Β:海底坡度角△C:声速变化Co:折射介质声速D:水深值从上式可以看出,该误差由三部分组成:第一部分为垂直误差;第二部分是由声线弯曲引起的水深误差;第三部分代表回波的位置偏移以及在斜坡区由于位置偏移而引起的水深误差。
3 声速剖面采集现场实测声速剖面主要是通过投放声速测量仪而获得的。
声速测量仪有多种,例如M ark B CTD P rofiler、SV P-16P rofiler、XB T等等,其中前两者可获得全深度的声速,后者仅能获得数百米深度的声速数据。
311 几种设备性能简介M ark B CTD P rofiler(以下简称CTD)主要用于测量海水的温度、盐度(电导率)、压力(水深)以及分层采水等,其声速值是根据温、盐、深三值计算而得,因此,它所提供的声速值的准确性(精度)取决于温度、盐度和压力三个传感器的性能,CTD各探头的性能指标如表1所示。
SV P-16是一种专门用于测量海水声速的设备,它能同时提供水深、声速、水温三组数据,分别由压力、声速、温度传感器采集获得,其性能指标如表2所示。
SV P-16采样率最小为1m s,工作深度5000m。
从表1、2所列的仪器性能可看出,CTD采集的声速数据精度要比SV P-16更高一些。
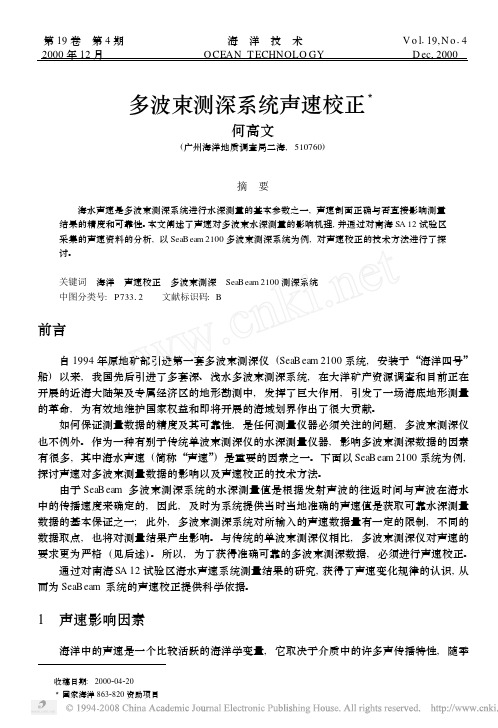
表1 CTD探头性能指标项 目范 围精 度分辨率温 度-32~32℃±01005℃010005℃压 力320~6500db±015~±615db01005~011db电导率1~65mm ho±01005mm ho01001mm ho 61 海 洋 技 术 第19卷表2 SV P -16传感器性能指标项 目精 度分辨率备注声 速0125m s 0113m s 温 度011℃01001℃范围-2~38℃压 力011%F 1S 101005%F 1S 1312 采集过程图4 SA 12-32L 测站海水声速及温度剖面图两种设备均为有缆作业,CTD 是通过通讯电缆把探头感应到的信号传递到实验室的控制计算机中,经计算处理后,得到声速值;SV P -16则是把探头感应信息存储到本身的内存中,提升回来后,再回放并经过处理得到可供利用的声速数据(图3)。
此外,SV P -16也可接通讯电缆,在投放过程中直接把感应信息传递到控制计算机中。
准 备 → 投 放 → 提 升→计算机处理→声速结果图3 声速采集流程简图313 测量结果比较CTD 和SV P -16两种声速采集设备在同步作业时的测量结果如图4所示。
从图中可以看出,两者测量的温度几乎完全吻合,而声速值稍有差异,但总体结构是一致的,尤其在300m 以上水深,比较接近,300m 以下,两者差异逐渐增大,最大约3m s 。
从数据本身来看,SV P -16灵敏度不够,声速值在垂直剖面上呈线段状跳跃变化,而CTD 的声速值变化为渐变过程,综上所述并结合仪器性能特点,可以看出,CTD 测量的声速数据质量优于SV P -16。
4 声速剖面变化规律如前所述,声波在海水中的传播速度与海水温度、盐度、压力三因素关系最大。
在海洋中的不同深度,温度、压力也随之变化,因此,声速在垂向上也表现出一定的变化规律。
从声速剖面图(图4)可以看出,在垂直方向上大致可以划分出4个声速变化层,它们与深海声速剖面分层基本一致。
层1为表面层,一般水体厚度不大,声速在该层对热、冷和风的作用的日变化和地区变化很敏感,由于风吹过海面时产生的混合作用,该层通常表现为等温的混合层,声速基本保持不变。
该层对声波具有通道作用。
在长时间风平浪静的日照条件下,此等温混合层将消失,而被温度随深度逐渐降低的水层所取代。
层2为季节跃变层(又称温跃层),该层71 第4期 多波束测深系统声速校正 厚度较层1加大,温度随深度急剧变化,表现为负的温度梯度和声速梯度,此梯度随季节而异。
层3为主跃变层(又称渐变层),该层厚度进一步加大,声速梯度仍为负值,但变化较小,它受季节变化的影响很微弱。
层4为深海等温层(又称均匀层),该层一直延伸至海底,声速梯度在该层变为正值,温度几乎不变,声速主要受压力影响,随深度增加,声速也逐渐增大。
综合试验区22个测站测量结果,得出的各层分界线变化范围见表3所示。
表3 声速剖面分层界线层1-层2层2-层3层3-层4水深(m)20~45200~4001000~1200层1与层2之间界线比较明显,层2与层3和层3与层4之间并无截然的分界线,通常为渐变过程。
5 三种声速数据来源对SeaB eam多波束测深系统水深值的影响SeaB eam多波束测深系统对声速剖面的要求比较严格。
只有向系统提供正确的声速剖面,才能得出合理可靠的水深值。
声速数据可以从多种途径获得,不同来源的声速数据,其精度可能参差不齐。
我们选择了三种途径获得的声速数据,用以检验它们各自对SeaB eam系统测深值的影响,它们分别来源于CTD、SV P-16测量结果和全球大洋声速数据库。
在M B-System软件包中,可以通过m b levitu s命令获得全球各大洋1°×1°范围内的年平均声速剖面。
选取在CTD和SV P对比试验附近地区采集的数据文件(SB1997041214331rec),该地区地形平坦,利于对比,分别用CTD、SV P-16和全球大洋声速库(sv-dbase)的声速剖面重新计算水深值,取其中5个特征点进行对比,结果列于表4。
表4 三种声速剖面的SeaBeam测深值及其绝对差(单位:m)项目测深值起始点结束点中心波束(50个P ing平均)最大值最小值声 速绝对差CTD161412161516161312160713164512 SV P-16161611161715161511160514164318 svdbase161318161512161218160612164413△CTD-SV P16-119-119-119119114△CTD-svdbase014014014111019△SV P16-svdbase213213213-018-015 由SeaB eam系统性能可知,在1600m水深时,中心波束允许误差为±312m,边缘波束为±8m,表4中的各绝对差均在允许误差范围之内,表明三种声速数据的精度均能满足系统的要求,其中与-的绝对差较小,两者测深值吻合得较好。