虚拟机床在五轴加工中的应用
基于VERICUT的虚拟机床建模与应用

oft e i pelrn m e ia o r l o r m y us g t svi u l a hn , h c s ie ia i h e lm a h ・ h m l u rc lc nto e pr ga b i hi r a c ie w ih i d nt lw t t e r a c i n t m c h
( . 龙江科 技学 院 机 械 学院 , 尔滨 10 2 ; . 宁工程 技术 大学 机 械 学院 , 宁 阜新 13 0 ) 1黑 哈 507 2 辽 辽 200 摘要: 文章 介 绍 了虚拟 机床技 术及 其 常用的 建模 方 法 , 定 了基 于 V R C T软 件 的虚 拟机 床建 模 流程 。 制机床与自 动化加工技术
文章 编 号 :0 1 2 6 ( 0 8 0 0 2 0 10 — 2 5 2 0 ) 7— 0 2— 3
基于 V RC T的虚拟机床建模 与应用 E IU
王 学 惠 冯 明 军 刘世 成 , ,
2 C lg f ca i l nier g La igT cncl n esy F xnLann 2 0 0, hn ) . o eeo h nc g ei , i Nn eh ia U i r t, u i io i 13 0 C ia l Me aE n n o v i g
s e u t g ma h e HS 6 0U c o dig t hs pr c s .Sm ua i ga rf nge ey ma h i g pr c s pe d c ti c i M 0 n n a c r n o t i o e s i lt nd ve i n yi v r c in o e s n
nigc ns q e ty, ai ae h tt i eh d c n f r c s hem a hii o e s gTh sm e h d h s g o r n ,o e u n l v l t st a h sm t o a o e a tt c n ngpr c s i . i c o a o d pe 。 d n
虚拟制造技术在复杂曲面五轴联动加工中的应用
造周期 该技术在
现代制造业中具有
广阔的应用前景
序进行反复的调试 , 造成 了人 力、
时 间 、能 源和 材料 的 浪 费 ,且效
率低下。
二、虚 拟制造机床 系统
实机 床加 工的仿真 了。仿真能够真
针 对 复杂 曲面五 轴联 动 系统 实地 模 拟 出过 切 、碰 撞 等 各种 现
虚 拟制 造机 床 系统 是 现 实制 机床几何结构 、控制 系统和 刀具库
造机床系统在虚拟空间的映射 ,它 的建立。虚拟机床要 能够真 实地反 是 由虚拟 的机床一刀具一夹具一工 应现实机床 ,首 先要 求有同样的机
CM A 自动编程技 术、测量技 术、制 件所组成 的虚拟系统 ,具备现实机 床拓扑结构 ,其次机 床各运动轴的 造工艺学、切削仿真技 术等 多学科 床加工系统 的全部功能 、特征和行 几何尺寸要 求同现 实机床 致 ,特 别是五 轴联 动机 床有两个旋转轴 的 交叉的综合技术 ,因此具有较高 的 为 ,能够 完成现 实机床加 工系统 同 N 铣 头和Z C 轴滑 枕的尺 寸更需 要 同 技术难度。但 由于五轴 联动 加工技 样的虚拟生产任 务。通过 虚拟制造 现实机 床完全一致 ,另外 ,机床各 术所具有的高精度、高 效率、加工 机床对复杂 曲面的五轴联动数控 加 运动轴的运动极限及相对关 系也要 适应性强等特点 ,也使它能够更好 工进行仿真 ,能够真实地反映制造 同现实机床一致。控制 系统 的建 立 地适 应复 杂 曲面 的 数控 加 工。 如 加工过程 中的过切 、碰撞等干涉现 目的是使虚拟控制系统具备 同现 实 今 ,五轴联动加工技术已经在发 电 象 ,为程序的修改提供 了数据 ;能 系统相同 的功能 ,并且 能够对机 床 设备制造 业、飞机制造业 、轮船制 够对加 工程序进行反复调试 ,在不 功 能 ,如 G 代码 、 H 码 等 功能 代 代 消耗材料 、能源 ,不 占用机床时 间 造业中得 到了广泛 的应 用。 码进行定义 ,并实现 对虚拟 机床的 对 于 复杂 曲面 的五轴 联 动 数 的情 况 下得 到 正确 的数 控 加 工程 控制 功能 。建 立机 床刀具库主要是 控编程来说 ,由于曲面复杂 ,且 大 序。虚拟 制造 机床 系统能够提供加 建立 用于 实际制造 系统 中相 同尺寸 多为不可展开的雕 塑曲面 ,在 编程 工过 程中的关键数据 ,如优化后 的 规格 的各种刀具 ,以真实模拟切 削 通过 时容易产生不易察觉的过切等干涉 切削参数、总的加工时间等 , 的过 程。 现象。并且 ,在五轴联动数控机床 它们可以评价加工策略的优劣并改 2 机床仿真及校验 . 的加 工 中 ,N 铣头 的旋 转 或工 件 进加工方案 ;能够进 步对加工程 C 在 虚拟 制 造机 床 上添 加 工 件 旋 转很容 易发生干涉和碰撞现象 , 序进行优化 ,缩短切削加工过程 中 毛坯 、刀具和 夹具 ,设 置编程坐标 造成工件、刀具甚至机床的损坏。 的空行程走 刀时间和调整复杂 曲面 系和机床坐标 系的相 对位 置关系 , 因此 ,在实际加 工中,即使很有经 不同位置 的加工进给率 。 加载 加工程序后 ,就可 以实现对现 验的工程师也需要进行试切 ,对程
正交型五轴虚拟机床NC刀具路径仿真加工研究吴陈燕
煤矿机械Coal Mine MachineryVol.34No.01Jan.2013第34卷第01期2013年01月[],,1五轴机床的分类所谓的五轴机床是指在X 、Y 、Z 正交的三轴驱动系统内,另外加装倾斜与旋转的2个旋转轴系统,而其中X 、Y 、Z 轴决定刀具的位置,另外2个旋转轴决定刀具的方向。
一般五轴机床的类型可分为三大类:(1)2个旋转轴都带动机床主轴的旋转,此类型称为主轴倾斜型,而此类型的五轴机床因为它的2个旋转轴都在主轴头上,床台载重能力较佳,所以大多使用于加工大型工件的场合;(2)2个旋转轴都带动机床工作台旋转,此类型称为工作台倾斜型,此类型的五轴机床的工件是放置在回转倾斜的工作台上的,适用于小型而复杂的曲面加工,而且其主轴刚性高,故可应用于重切削;(3)一个旋转轴带动主轴旋转,另一个旋转轴带动工作台旋转,此类型称为工作台主轴倾斜型。
不同的机型构造适合于不同的时机、场所,所以在选择五轴机床时,需视使用的工作需求来选择最适合的五轴机床。
2基于VERICUT 软件的虚拟机床创建本文以瑞士GF 阿奇夏米尔机床厂生产的Mikron Ucp800机床为例来介绍基于VERICUT 软件的虚拟机床的创建方法。
2.1建立或导入机床模型在VERICUT 系统要取得机床模型的资料有2种方式:(1)由VERICUT 系统本身建立机床模型,但构建模型相对简单,不能满足机床的装配要求或者影响机床的视觉效果,可在要求不高时使用;(2)由外部系统(比如UG 、Creo 、Caxa )产生机床模型,用此种方式可建立任意复杂的机床模型,但要求在CAD 软件建模时设置好坐标系。
正交型五轴虚拟机床NC 刀具路径仿真加工研究*吴陈燕(台州职业技术学院,浙江台州318000)摘要:利用Creo 设计出五轴虚拟数控机床模型,用Creo 设计工件模型及五轴加工NC 代码,然后由VERICUT NC 切削加工模拟软件整合前两者的资料,即可开始进行五轴切削仿真验证,监控数控机床加工中可能的超程、过切、干涉等潜在问题,消除程序中的错误,从而在VERICUT7.14环境下,实现了Mikron_ucp800五轴虚拟数控机床仿真加工多面体零件的全过程。
基于UG的五轴加工中心虚拟机床及后置处理开发

基于UG的五轴加工中心虚拟机床及后置处理开发周云曦【摘要】集成仿真和验证(IS&V)技术是五轴数控编程加工技术的重要组成部分.通过运用UG软件构建虚拟机床模型、创建机床运动模型、创建虚拟机床驱动器,并最终成功测试所建虚拟机床,来讨论五轴加工中心虚拟机床的开发和应用.为各类五轴加工中心的虚拟机床开发设计提供借鉴平台.【期刊名称】《制造业自动化》【年(卷),期】2015(037)024【总页数】3页(P113-115)【关键词】虚拟机床;集成仿真和验证;后置处理【作者】周云曦【作者单位】常州机电职业技术学院,常州 213164【正文语种】中文【中图分类】TP241.30 引言先进的五轴五联动数控加工中心在复杂零部件的生产制造方面具有明显的优势和重要现实意义。
UG软件是SIEMENS公司开发的一款CAD/CAM/CAE集成软件。
该软件的切削加工集成仿真和验证功能(IS&V)可以实现数控机床虚拟加工零件的整个过程(如图1所示)。
图1 CAM控制处理关系IS&V可以虚拟仿真机床控制器功能,包括循环指令、宏程序调用、子程序调用;同时可以检测机床部件、夹具、刀具、零件之间的碰撞。
技术人员通过运用IS&V 功能可以避免花费昂贵和耗时的空运行检查,从而降低成本,减少操作者干涉;通过减少碰撞降低机床、夹具和工件损坏风险;最终提升企业的生产效能。
本文运用UG软件进行TOM1060型五轴联动加工中心的虚拟机床及后置处理开发。
1 构建虚拟机床模型TOM1060型五轴加工中心配备SIEMENS840D sl数控系统,采用双转台式五轴联动结构。
各运动轴行程XYZ1000mmX600mmX500mm,A轴±110℃,C轴±180℃。
在使用UG软件进行IS&V时,首先需要运用UG建模功能按照床身本体(machine_base)、Z轴部件(Z_slide)、X轴部件(X_slide)、Y轴部件(Y_slide)、A轴部件(A_table)和C轴部件(C_table)的分类,创建模型数据;其次运用装配功能将各部件装配成完整的机床模型数据,各装配体之间建立约束关系,限制自由度;最后将XYZAC各轴部件设定与真实机床相一致的初始位置,从而完成虚拟机床模型的构建。
基于中望3D的五轴联动全机床加工仿真研究
基于中望3D的五轴联动全机床加工仿真研究发布时间:2021-12-16T01:49:55.445Z 来源:《科技新时代》2021年10期作者:甘文峰[导读] 以国产某型号五轴加工中心为原型,在中望3D软件中绘制机床各个部件并组合成装配体,导入至机床构造器中构建虚拟机床。
广州中望龙腾软件股份有限公司摘要:以国产某型号五轴加工中心为原型,在中望3D软件中绘制机床各个部件并组合成装配体,导入至机床构造器中构建虚拟机床。
以叶轮模型为加工案例,具体介绍在中望3D全机床仿真平台中的数控程序编制,机床运动链配置,运动轴、工件、毛坯以及仿真参数的设置。
运行机床运动仿真,观察材料切削模拟过程,并与目标零件进行形状对比。
经实践检验,基于中望3D的全机床仿真有效避免干涉碰撞,工件过切,能够为使用同类型机床的数控加工提供借鉴。
关键词:中望3D;全机床仿真;CAM;叶轮加工0 引言使用五轴加工中心时,由于旋转轴的存在,各部件运动轨迹难以预测,极容易产生安全事故。
因此,在实际上机切削之前,需要通过计算机仿真,模拟各部件运动过程,判断是否会出现碰撞或干涉。
同时,检查刀具对毛坯的切削过程,防止出现过切或工件报废。
机床仿真在国外发展较早,已经产生了一系列商用软件。
美国CGTech的Vericut软件可以构建机床,定义数控代码解析规则,进行NC仿真[1]。
海克斯康(HEXAGON)公司旗下的NCSIMUL软件提供了数控加工仿真、优化、后处理一体化解决方案[2]。
近年来,国内也开展了大量研究,南京斯沃软件开发了SWAN SOFT机床仿真平台,并可以模拟多款数控系统的操作面板[3]。
中望3D提供了CAD/CAM设计制造一体化平台,并提供基于NC代码的加工仿真。
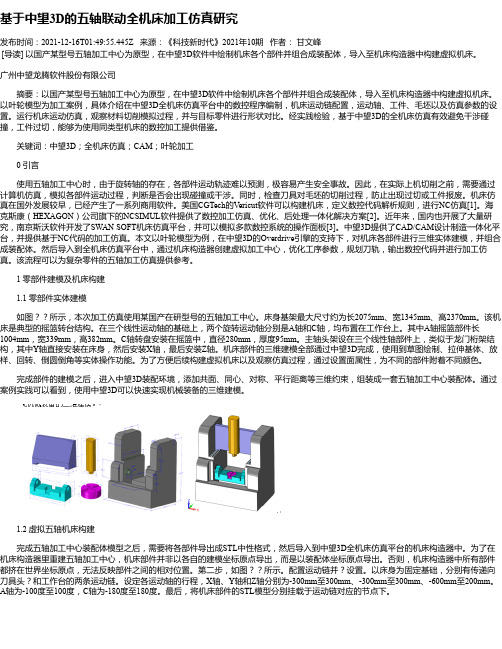
本文以叶轮模型为例,在中望3D的Overdrive引擎的支持下,对机床各部件进行三维实体建模,并组合成装配体。
然后导入到全机床仿真平台中,通过机床构造器创建虚拟加工中心,优化工序参数,规划刀轨,输出数控代码并进行加工仿真。
AC双转台五轴联动数控加工中心的后置处理

AC双转台五轴联动数控加工中心的后置处理摘要:数控加工技术已经成为现代制造业中不可或缺的一部分,它可以高效地完成各种零部件的加工任务,并且具有高精度、高效率的特点。
AC双转台五轴联动数控加工中心可以完成更加复杂的加工任务,在加工完成后还需要进行后置处理,以保证加工零件的质量和精度。
文章以AC双转台五轴联动数控加工中心为研究对象,研究其后置处理的可行性,以期为多轴设备提供有效保障。
关键字:双转台;五轴联动;后置处理前言在数控编程过程中,前置处理指的是刀位的轨迹计算过程。
基于相对运动这一原理,一般在工件坐标系当中来计算刀位的轨迹,无需将机床结构、指令的格式考虑进去,以使前置处理通用化,保证前后置处理能够各自负责相应的任务。
为了读取最终加工程序,就需要对前置处理得到的刀位数据进行转换,形成机床程序代码,这一过程就是后置处理。
在航空领域,AC双转台五轴联动数控加工中心的后置处理起着重要保障作用,本文主要以AC双转台五轴联动数控加工中心的后置处理展开探究。
1后置处理的概述1.1 概念后置处理属于数控加工和CAM系统间的桥梁,其主要任务就是对CAM软件生成的刀位轨迹进行转化,使其成为符合特定数控系统、机床结构的加工程序。
1.2 主要任务五轴联动数控加工中心的后置处理有着重要的任务,主要是结合机床的控制指令格式、运动结构等要求,对于前置处理所生成的刀位数据文件进行转变,使其成为机床各轴的运动数据,然后,依据控制指令的具体格式,将其进行转换,形成数控加工中心的加工程序。
具体而言,可以将后置处理的任务分为几下几点:①机床运动学转换五轴联动数控编程所生成的刀位数据,通常指的是刀具与工件坐标系相对的刀心具体位置、刀轴矢量数据。
在机床的运动转变下,其主要是依据实际运动结构,对刀位文件当中的数据信息进行转换,使其成为不同运动轴上的数据信息。
②非线性运动误差的校验非线性运动误差的校验是在CAM系统计算刀位数据时进行的,这个系统使用离散直线来近似工件轮廓。
虚拟现实及其在数控机床中的应用
虚拟现实及其在数控机床中的应用虚拟现实及其在数控机床中的应用摘要:本文首先介绍了虚拟现实的基本概念,虚拟现实系统的构成、研究内容和关键技术,在此基础上介绍了一种虚拟现实系统的实现机制;然后通过虚拟数控机床的功能分析,提出了虚拟数控机床的体系结构,并介绍了虚拟数控机床的应用。
关键词:虚拟现实,实现机制,虚拟数控机床Abstract: This paper firstly introduces the basic concepts of virtual reality, and composition, content and key technology of virtual reality systems, on the basis of which an implementation of virtual reality system mechanism is introduced ; then through a virtual machine tool’s functional analysis presents the architecture of virtual machine tool and describes the application of virtual machine tools. Keywords: virtual reality, implementation mechanism, virtual machine tools1 虚拟现实简介虚拟现实(Virtual Reality,简称VR),这一名词是由美国科学家Jaron Lanier 上世纪在80年代初提出的,也称为灵境技术或人工环境。
1.1 虚拟现实概念目前比较公认的较精确的VR定义是:采用以计算机技术为核心的现代高科技生成逼真的视、听、触觉一体化的特定范围的虚拟环境,用户借助必要的设备(如特制的衣服、头盔、手套和鞋等)以自然的方式与虚拟环境中的对象进行交互作用、相互影响,从而产生“沉浸”于等同真实环境的感受和体验。
VERICUT五轴虚拟机床模型的开发及后处理验证
N ,无需 在 机 床 上 直 接 操 作 ,快 速 、安 全 、可 靠 , C
效 益更 明显 ,五 轴 加 工 中心按 照其 结 构 特 点 的 不 同 可分 为四 大类 :双摆 头 机 床 、摆 头及 转 台机 床 、垂
: 5 ) b 6
; j
r 加 参 。 冷 , ’ 堋 磊
C D/ A C P直甩 A C M/ AP
1 p l ain o AD/ AM ̄ AP p i t f C c o C C P
(一10 一 0 , 一10 ,视 图 方 向 H —IO进 行 观 7 , 30 5) S
中心 ,这些 机构 的相互关 系相 当重要 ,不 能出错 。 3 。构 建 虚 拟 机床 模 型
图1 五轴机床外观图
技 术 参 数 表
具 体 的 技 术 参 数
如 附表 。
根据上 述 的五 轴 机 床结 构关 系 就 可 以 构 建 机 床 模型 了 ,具 体步骤 如下 : ( ) 起始 操 作 选 取 菜 单 中 Mo e- o p n n 1 dl  ̄C m o e t
别 、更 正 引起 的碰撞 。
代 了传统 的切 削 实 验 部 件 方 式 ,优 化 数 控 程 序 的 切 削速 度 ,获得 更高 效率 。
一
般的 N C仿 真 软件 只 能 模 拟 2 、3轴 的数 控 车
床或 加工 中心 ,数 控 系 统 、设 备 型 号 非 常有 限 ,有 些无法 验 证 宏 指 令 ,更 不 用 说 四五 轴 的机 床 了 。而 四五轴 加 工 中 心 有 许 多 种 形 式 ,有 立 式 的 、有 卧式 的 ;有 A B轴 、B C轴 、C A轴 ;有 的 是 工 作 台 翻 转 、
五轴联动数控加工中心仿真系统开发应用
五轴联动数控加工中心仿真系统开发应用摘要:本文所涉及的数控加工系统是基于CATIAV5的功能模块建立的,通过对动龙门五轴联动的实体测量、建模、组装和整机模拟,实现数控加工过程的仿真。
同时根据本行业实际生产技术需要,结合VER- ICUTR软件零件切削过程仿真验证优势,建立CATIA与VERICUT两软件平台之间的宏联结,实现将机床运行数控程序过程中的过切、干涉、碰撞和欠切等错误消除在设讣阶段的U的,提高数控加工过程的可靠性。
LI前大型数控五轴联动在科研生产过程中,主要用于进行大型复杂航空零部件与工艺装备制造加工,因空间结构复杂,外形体积大,常出现零件首件过切,未加工到位,机床与零件或工装干涉,模锻件装夹定位不准确和加工超行程等问题,仅凭借数控编程技术人员个人经验,工作量庞大且复杂,难以克服。
针对五坐标数控加丄机床控制系统不具有数控加丄过程的动态模拟仿真功能,笔者结合虚拟制造技术,在计算机辅助制造软件(VERICUT 5. 4)平台基础上,开发了数控加工机床仿真系统模块。
该仿真系统可以在\C代码的驱动下运行,用以观察数控机床部件运动和零件的加工成形过程中空间运动状况,验证加工程序G 代码的正确性,防止实际加工过程中干涉和碰撞等故障发生。
该系统旨在以五坐标数控机床为验证工作机,研究FIDIA C20控制系统的驱动工作原理,建立数控加工中心仿真工作平台,进行典型回转曲轮轴和蒙皮锻金工艺装备五轴联动铳切的加工过程模拟。
涉及到仿真工作环境下的大型工艺装备装夹定位,确定数控参数库,模拟数控加工程序的运行过程等。
一、开发研究过程1.五坐标数控加工中心加工仿真系统技术研究比较同类型仿真系统现状,LI前技术能力可以建立儿何仿真系统,模拟计算刀具切削速度、切削量和切削时间等。
(1)软件系统研究方案制定与基础工作调试准备。
①方案制定:首先将VERICUT与CATIA软件功能模块测试验证联接;然后建立五轴联动数控加工中心机床结构与运动关系分析;最后生成五轴联动数控加工中心模拟系统。
基于HyperMill虚拟机床的建立与仿真
基于HyperMill虚拟机床的建立与仿真高奎强;刘一波【摘要】HyperMill自动进行干涉避让,为五轴刀路进行准确验证,进一步保证了五轴加工的安全性,避免机床干涉,刀具干涉,夹具干涉等.提出一种通过NX建模导出stl格式模型进行建立虚拟机床,实现了机床仿真模拟加工,采用HyperMill自带的HyperVIEW进行模拟仿真,大大提高了五抽加工效率.【期刊名称】《价值工程》【年(卷),期】2019(038)006【总页数】3页(P177-179)【关键词】HyperMill;NX10;五轴仿真;虚拟机床【作者】高奎强;刘一波【作者单位】辽宁轨道交通职业学院,沈阳110023;辽宁轨道交通职业学院,沈阳110023【正文语种】中文【中图分类】TG659;TP391.90 引言HyperMILL是德国OPEN MIND公司开发的集成化NC编程CAM软件。
HyperMILL向用户提供了完整的集成化CAD/CAM解决方案。
用户可以在熟悉的CAD界面里直接进行NC编程,统一的数据模型和界面,直接完成从设计到制造的全部工作。
它是一种高端和低端都适用的CAM软件。
HyperMILL具有友好的用户界面,新五轴联动加工,方便的后处理,100%的干涉检查和丰富的加工策略,逼真的渲染仿真。
1 机床各部件结构和逻辑运动关系建立的机床为回转摆动五轴联动立式加工中心,最大允许的工件直径Ø840mm,高度500mm和最大重量1.000kg,刚性工作台的最大工件尺寸1.000×840×560mm和最大重量1.800kg。
行程为:X=650mm,Y=650mm,Z=560mm,摇篮式工作台,回转C轴和摆动A轴。
C轴回转工作台直径 650mm,360°回转,内嵌在800mm×650mm刚性工作台中,工作台转速40rpm/min,旋转精度P=7 arc s,A 轴摆动范围+120°/-120°,摆动速度20rpm/min,旋转精度 P=9 arc s。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
虚拟机床在五轴加工中的应用作者:徐安林李萍来源:《数字技术与应用》2012年第12期摘要:本文首先介绍了虚拟机床的工作原理与应用优势,在五轴加工过程分析的基础上,提出了在五轴加工过程中建立虚拟机床,并在涡轮增压器的加工中进行了应用测试,取得了较好的加工效果。
关键词:虚拟机床五轴加工三维仿真中图分类号:TG659 文献标识码:A 文章编号:1007-9416(2012)12-0036-021、引言随着科学技术的迅速发展,国民经济各部门所需求的多品种、多功能、高精度、高品质、高度自动化的技术装备的开发和制造,促进了先进制造技术的发展。
目前代表机床制造业最高境界的是五轴联动数控机床系统,它是解决叶轮、叶片、船用螺旋桨、重型发电机转子、汽轮机转子、大型柴油机曲轴等加工的唯一手段,对航空航天、军事、科研、精密器械等行业都起着举足轻重的作用。
但是五轴联动数控机床系统价格十分昂贵,加之在数控程序编制上存在着很大困难,因而如何使得五轴加工得以―平民‖化应用,已经成为机床制造业的一个热点问题。
本文从虚拟机床技术开发,探讨其在五轴加工的应用,实现仿真加工,优化数控程序,从而提升加工质量、提高加工效率、降低加工成本。
2、虚拟机床应用的优势数控加工最终的好坏取决于以下5个因数中的短板:数控机床、控制器、刀具、数控编程和CAM软件。
虚拟机床的应用正好可以解决以上短板问题,采用虚拟机床存在以下优点:2.1 真实性传统CAM软件驱动的标准模拟仿真是一种不完整的近似运动模拟,不能避免实际加工过程中的过切与撞刀。
虚拟机床技术采用内置CNC控制器驱动的加工模拟仿真是真实可靠的,可以把加工中的各种风险(撞刀、过切等)降为零。
2.2 先进性虚拟机床不仅可以仿真传统的车床、铣床、加工中心,而且可以仿真车铣复合和多轴联动机床。
目前,西门子公司的虚拟机床对于不同CNC控制系统的特殊加工指令及FMS柔性制造系统可以进行仿真。
2.3 互操作性虚拟机床不仅提供三维数字机床,而且包含虚拟控制面板,提供和车间环境一样的虚拟实训环境。
应用虚拟机床,可以实现学生的大量仿真与真实机床没有区别。
这对于目前企业紧缺的中高端数控人才,是一个很好的培训解决方案,使复杂机床的编程及加工操作培训费用降低50%,从且可以大大地降低培训成本。
2.4 开放性虚拟机床可以有效地连接CAM编程和车间加工,接受不同CAM软件编制的NC程序或手工编程,方便与不同的软件环境对接。
虚拟机床也可以按照不同的CNC控制系统和机床型号进行定制,以方便与机床硬件环境对接。
2.5 异地共享目前对于五轴联动数控机床这样的高端机床,由于数量少和技术要求高,导致普遍使用率偏低。
虚拟机床技术可以打破真实机床共享使用的地域限制,平衡投资,而且未来升级方便。
3、复杂零件五轴加工过程与解决方案五轴加工环节包括:模具准备、刀具编制、仿真验证、后置输出、机床加工。
五轴加工的过程是纯计算机模拟的。
3.1 加工模型准备NX把CAD、CAE和CAM全部集合在一个系统中。
通过最新的CAD技术,数控编程人员能够快速地完成模型准备。
即使原始数据来源于第三方CAD系统也是一样的。
(1)模型创建和编辑:运用强大的建模和编辑技术(CAD)创建用于CAM编程的零部件模型。
(2)模型质量与验证:分析和验证几何条件——检验表面缺陷、壁厚、半径等。
(3)零件制造信息:检查可能影响加工方法的更多模型信息(公差、表面粗糙度),这些信息可驱动CAM。
(4)文档与绘图:基于3D模型快速创建用于加工的任何文档。
在此过程中的关键技术包括四点,第一是混合建模、同步建模技术,进行无约束设计,第二是采用轻量表示和NX WAVE技术将零件、产品的制作复杂度降低,第三是在设计过程中使用行业专门自动化技术加快设计进度,第四是设计开放,能够处理其他CAD数据。
3.2 五轴加工编程五轴加工采用广泛的加工策略,提供灵活的刀具轴控制选项,轻易处理复杂的工作需求,实现高度灵活的编程。
利用最新的加工设备和制造工艺,以更快的速度加工质量更好的零件。
在五轴加工编程过程中,点、线、面、边界等驱动,法向、插补、相对等刀轴实现了丰富的驱动方式和刀轴控制;可变轴轮廓加工可以通过简单选择底部几何体来自动加工复杂侧壁,识别叶轮几何,自动创建刀轨,便于便捷式的交互处理;不断改变刀具和毛坯表面的相对角度,使刀具的接触面积最大化,实现了曲率匹配这一新技术。
3.3 CAM/CNC一体化CAM/CNC的有机集成,通过刀轨计算精度控制、优化后置处理、真实的模拟仿真,让CAM的输出充分考虑机床控制系统的高级功能,实现产能的最大化,并消除了风险。
4、五轴加工中虚拟机床的建立真实的数控机床包括了机械结构和控制系统两部分。
在VER ICUT 平台上构建虚拟数控机床也需要有两部分内容:机床结构模型的建立和机床控制系统的建立。
4.1 虚拟机床结构模型的建立4.1.1 五轴运动结构分析根据ISO的规定,在描述数控机床的运动时,采用右手直角坐标系。
其中平行于主轴的坐标轴定义为z轴,绕x、y、z轴的旋转坐标分别为A、B、C。
各坐标轴的运动可由工作台,也可以由刀具的运动来实现,但方向均以刀具相对于工件的运动方向来定义。
通常五轴联动是指x、y、z、A、B、C中任意5个坐标的线性插补运动,如图1所示。
五轴实际是指x、y、z三个移动轴加任意两个旋转轴。
相对于常见的三轴(x、y、z三个自由度)加工而言,五轴加工是指加工几何形状比较复杂的零件时,需要加工刀具能够在五个自由度上进行定位和连接。
4.1.2 虚拟机床结构模型的建立构建虚拟机床有多种方法其中利用专业的数控加工仿真平台,通过二次开发构建虚拟数控机床的方法是现实而有效的。
VER ICUT是先进而成熟的数控仿真加工平台软件,不仅含有丰富的数控机床库,并支持定制功能,可以构建出用户所需要的数控机床。
虚拟机床的结构部分包括床身、主轴系统、进给系统、夹具、工件等。
创建虚拟机床结构的方法主要有2个:一是基于VERICUT自身的通用建模功能,在VERICUT库中找一个相似程度很高的虚拟机床结构,以此为基础通过修改、添加的方法构建出所需要的机床结构模型。
二是对于复杂机床结构,利用VERICUT与其它CAD/ CAM软件接口,将建立好的特种机床实体模型导入VERICUT环境中并装配。
笔者在设计虚拟机床结构模型时,首先采用第一种方法,虽然创建较为简单,但是由于局部特征表达得不够清晰,使得模拟加工过程中碰撞干涉检验的能力降低。
在吸取经验教训的基础上,通过SIEMENS NX 重新对绘制模型,将机床整体模型描述清晰,使得局部特征明显。
但此种方法存储空间较大,在模拟加工过程中有可能会出现坐标漂移的问题。
通过不断优化模型,降低了坐标漂移的可能性。
4.2 虚拟机床模型运动关系设置以机床工作台主参考体测量,按图2所示结构树顺序采用相对运动约束关系,建立机床原点静止装配数据模型,完善后转化为*.STL文件,数据分别联接入仿真控制系统结构树,形成五轴联动机构。
编制数控控制指令系统文件(fidia20.ctl文件)与数控机床构造文件(FOREST-LINE.mch 文件),模拟FIDIA C20数控指令系统,翻译识别检查FIDIA C20系统(GM)指令,驱动结构树内X轴部件、Y轴部件、Z轴部件(线性运动)、C轴部件(旋转运动)和A轴部件(摆动)同步联合运动。
设置机床仿真系统工作行程软边界:X轴、Y轴、Z轴、C轴和A轴工作行程的上下边界。
4.3 建立机床刀具库和砂轮库启动刀具管理器可以创建所需要的加工刀具。
在刀具管理器中主要提供了很多刀具参数,如刀具类型、刀具直径、长度、刀柄等。
在VERICUT软件中按所需建立的铣刀类型(包含直齿铣刀、球头铣刀、锥度铣刀及用户自定义等),设置刀具几何参数,然后可以单独保存,并可以提供给不同的虚拟机床调用。
然后再用自画图方式,添加机床实际用的刀套Holder。
依照此方法,,建立一系列常用的刀具库。
此外,由于VERICUT软件没有提供设置砂轮的模块。
我们可以根据砂轮的切削原理采用铣刀类刀具模块创建砂轮,来满足仿真要求。
结合特种回转面刀具的几何成型过程中的不同工序要求,在VERICUT 中可以创建多个砂轮以供不同加工工序调用。
4.4 机床相关设置(1)数控系统设置;根据机床的控制系统功能和指令格式,对准备功能G 代码、辅助功能M 代码、寄存器地址和状态指令等进行设置,并保存该文件。
(2)设置干涉检查;(3)设置机床行程;(4)设置机床初始位置;(5)其他设置,如机床参考点、换刀位置等。
4.5 模型定位仿真加工在仿真控制系统结构树内填加夹具和毛坯联接树结构接口,分别定义空间位置并进行位置装配约束,进行调用拼装组合夹具定位或模锻件定位加工。
其中夹具接结构树接口可以直接读取,其中专用工装夹具可以与公司产品相应工艺装备文件连接。
标准组合夹具可以直接调用拼装夹具标准件库,然后在仿真系统内组合装配应用。
5、虚拟机床在五轴加工中的应用测试图3所示涡轮增压器中复杂曲面叶轮的加工投产前,在五轴联动加工的数控仿真系统内模拟应用。
该零件的工艺装备最大外形500mm×335mm×245mm,其中成型面为复杂双曲面,采用长度方向两侧局部拼接加工。
叶轮在五轴联动加工时,边界为:X 50.779,Y-123.586,Z-58.258。
位置主轴角度为:B-5.894°,C158.287°,工装定位未超出机床工作行程。
通过仿真系统分析两次定位模拟加工,显示零件加工过程的直观状态,C轴部件和A轴部件大角度联动空间状态可以在不同视角观测,以验证工艺过程合理性,避免工件装夹位置错误导致主轴刀具与工件碰撞。
6、结语通过上述研究实验的证明,利用虚拟机床技术,可以提高加工效率,保证数控编程质量,减少数控技术人员与操作人员的工作量和劳动强度,提高五轴联动加工的数控编程制造加工一次成功率,缩短产品设计和加工周期,提高生产效率。
参考文献[1]Rong Shean Lee, Yan Hong Lin. Development of universal environment for constructing 5-axis virtual machine tool based on modified D–H notation and OpenGL[J].Robotics and Computer-Integrated Manufacturing, 2010,26:253–262.[2]姚兴军,刘连军,张凤阳.虚拟数控机床的开发及其在教学中的应用[J].机床与液压,2010(6):101-103.[3]张哲山,姚斌,陆如升,李飞,姚博世.五轴数控工具磨床的虚拟加工仿真技术研究[J].工具技术,2011(41):46-49.[4]李全.VERICUT五轴虚拟机床模型的开发及后处理验证[J].金属加工(冷加工),2011(15):55-57.。