比例谐振控制算法分析
基于单相逆变器的比例谐振控制设计
基于单相逆变器的比例谐振控制设计李坤; 郑文帅; 马超; 刘春喜【期刊名称】《《电气技术》》【年(卷),期】2019(020)012【总页数】6页(P23-27,45)【关键词】逆变器; 比例谐振控制; 幅频特性; 零稳态误差【作者】李坤; 郑文帅; 马超; 刘春喜【作者单位】辽宁工程技术大学辽宁葫芦岛 125105【正文语种】中文随着近年来可再生能源的发展,如太阳能、风能等,并网发电技术成为研究热点[1-3]。
对于并网系统,精确的电流控制对于有效调节电网和逆变器之间的有功和无功功率至关重要[4-5]。
若要得到理想的效果就需要设计一个性能良好的逆变控制系统,其技术指标包括负载调整率、电源调整率、输出精度、稳态误差、动态响应等[6],良好的控制参数往往也可以很大程度地提高系统的综合性能。
传统的比例积分(proportional-integral, PI)调节也有广泛的应用,为了弥补其固有的缺点,提出了许多改进PI调节策略,譬如模糊PI控制[7],却造成了系统的复杂性和参数的敏感性。
文献[8-9]中采用无差拍电流控制的方法,可以提高控制性能,但是其过于复杂的运算将导致更长的控制延迟。
在旋转坐标系下采用PI控制可消除稳态误差,但该方法多用于三相系统,文献[10-11]针对单相逆变器,提出了采用单相旋转坐标变换的方法,可以有效地减小稳态误差,但是其实现复杂,增加了系统成本。
文献[12]中对比例谐振(proportional resonant, PR)控制原理进行分析,阐述了 PR控制能够在谐振频率处提供无穷大的增益,因而对谐振频率处的电流信号实现无静差跟踪,并且易于实现,可有效降低系统成本。
因此,本文以 PR控制为基础,通过对系统开环幅频特性的分析并结合系统稳定裕度和稳态误差的要求,求得了高基频增益、大稳定裕度和强鲁棒性的 PR控制器参数。
该方法综合考虑逆变器控制中的脉冲宽度调制(pulse width modulation, PWM)和采样延迟影响,在此基础上给出了 PR控制器参数的具体设计方法。
比例谐振控制在永磁同步电机调速中的应用研究

比例谐振控制在永磁同步电机调速中的应用研究1. 引言1.1 研究背景永磁同步电机是一种应用广泛、性能优越的电机类型,广泛应用于工业生产中的众多领域,如风力发电、汽车电动化等。
随着电气化技术的不断发展,永磁同步电机调速技术也日益成熟。
随着电力需求的不断增长和对电机性能要求的提高,需要更加高效的控制方法来实现永磁同步电机的精密调速。
目前对比例谐振控制在永磁同步电机调速中的应用研究还比较有限,需要进一步深入探讨。
本研究旨在通过分析比例谐振控制的原理和方法,探讨其在永磁同步电机调速中的应用,为提升永磁同步电机的控制性能和应用前景提供理论支持和实验数据。
1.2 研究目的本研究的主要目的是探究比例谐振控制在永磁同步电机调速中的具体应用效果,并对其在电机控制领域中的潜在价值进行分析。
通过对比例谐振控制原理及方法的深入研究,结合永磁同步电机调速技术的现状,希望能够验证比例谐振控制在提高永磁同步电机性能和效率方面的有效性,并探讨其在实际应用中可能遇到的挑战和问题。
本研究也旨在为永磁同步电机调速技术的进一步发展提供新的思路和方法,为提高电机系统的稳定性和效率提供技术支持和参考。
通过实验设计和结果分析,将为比例谐振控制在永磁同步电机调速中的应用提供实际数据支持,验证其在实际工程中的可行性和效果,为电机控制领域的研究和发展做出贡献。
1.3 研究意义研究比例谐振控制在永磁同步电机调速中的应用可以提高永磁同步电机的性能指标,如提高调速精度、降低谐波扭矩、减小振动等。
这对于提高永磁同步电机的工作效率和负载能力具有重要意义。
研究比例谐振控制在永磁同步电机调速中的应用可以为工程实践提供技术支持和参考。
通过实验设计和结果分析,可以验证比例谐振控制在永磁同步电机调速中的有效性,为工程应用提供重要参考。
2. 正文2.1 永磁同步电机调速技术及现状永磁同步电机调速技术是现代电力传动领域的重要技术之一,其具有高效率、高功率因数、高控制精度等优点,得到了广泛的应用。
带LCL滤波的并网逆变器的比例谐振控制_刘鹏飞

技术与应用2013年第1期 59带LCL 滤波的并网逆变器的比例谐振控制刘鹏飞 卓 菡(福州大学电气工程与自动化学院,福州 3501085)摘要 并网逆变器需要及时跟踪电网电压,同时输出电压也要达到规定指标。
目前已有多种并网逆变控制方法,均可以达到较好的控制效果。
在静止坐标系下,比例谐振(PR )控制算法可以实现无静差跟踪控制,同时PR 控制算法可以方便地实现谐波补偿。
相比其他几种算法,PR 控制算法简单,所需计算量小,有极大的应用前景。
关键词:比例谐振控制;并网逆变器;LCL 滤波器Proportional-Resonant Control of a Grid Connected Inverter with LCL FilterLiu Pengfei Zhuo Han(Fuhzhou University Department of Electric and Automatic Control, Fuzhou 350108)Abstract Grid connected inverter’s output current waveform ought to be synchronized with the grid voltage, and must also meet with industrial standards. Nowadays, we have many control methods to do this with acceptable performance. Recently, a new proportional-resonant control method has been proposed. Running under stationary reference frame, it is able to regulate AC signals without static error. And harmonic compensation is quite simple using a PR controller. With its simplicity, PR control algorithm needs less calculation and can be widely used.Key words :proportional-Resonant Control ;grid connected inverter ;LCL filter近年来,随着新能源发电越来越受到重视,对并网逆变技术的研究也多了起来。
航空永磁电驱动系统比例谐振型自抗扰速度控制器设计

航空永磁电驱动系统比例谐振型自抗扰速度控制器设计作者:陈哲陈沛阳滕国飞李金程骆光照来源:《航空科学技术》2023年第12期摘要:襟缝翼机电作动器是飞机高升力系统中的关键运动部件,其速度控制对襟缝翼的姿态调节十分重要。
然而,襟缝翼机电作动器易受到翼面周期性或非周期性气动载荷干扰,传统的比例积分型速度控制器性能实现受限。
为此,本文提出一种基于比例谐振自抗扰控制器(ADRC),在抑制非周期性干扰基础上还可抑制特定次周期性干扰。
周期性干扰通过采用比例谐振控制的扩展状态观测器来估计。
通过试验,比较了比例积分型控制器、传统线性自抗扰控制器和比例谐振型自抗扰控制器的控制性能,验证了本文所提出的方法可以显著抑制干扰、提高机电作动器的速度控制精度,为飞机平稳起降提供技术支撑。
关键词:机电作动器;永磁同步电机;速度控制器;周期性干扰;比例谐振中图分类号:TM34 文献标识码:A DOI:10.19452/j.issn1007-5453.2023.12.008基金项目:航空科学基金(201919053002)随着全电/多电飞机的快速发展,高功率密度机电作动器(EMA)在飞机飞行控制系统中得到了极大的推广,其大多采用具有高功率密度和高效率的永磁同步电机(PMSM)[1-3]。
在飞机高升系统的襟缝翼EMA中,需要加、减速度快和速度控制精度高[4]。
襟缝翼翼面在飞行中的气弹性载荷表现为周期性扭矩载荷[5],对PMSM驱动器的速度控制精度产生很大影响。
根据文献[6]、文献[7]中的分析,气动载荷或颤振的频率范围为25~250rad/s,并高度依赖其翼型的几何设计和材料特性。
因此,设计出一种抗干扰能力强的速度控制器对提升航空EMA性能具有重要意义。
现有的比例积分微分(PID)速度控制器在周期性负载扰动存在时控制性能受限。
为了设计一种更具抗周期干扰能力的速度控制器,许多学者尝试采用基于模型的控制策略,如模型预测控制[8]和内部模式控制[9],以及无模型速度控制策略,如重复控制(RC)[10]和迭代学习控制(ILC)[11]。
带LC滤波的三相逆变器的比例谐振控制
第45卷第6期2011年6月电力电子技术PowerElectronicsV01.45,No.6June2011带LC滤波的三相逆变器的比例谐振控制李永坚,黄绍平(湖南工程学院,电气信息学院,湖南湘潭411104)摘要:针对带LC输出滤波器的三相电压型逆变器,提出一种新的无电流传感器比例谐振(PR)控制策略,仅需检测输出滤波电容电压。
无需检测其电流。
相比于同步旋转坐标系的PR控制器,提出的PR控制器基于静止坐标系.无需进行复杂的坐标变换,减少了计算量,能对正序与负序电流进行统一调节。
仿真和实验结果表明,该控制策略具有良好的动静态性能,可实现正弦交流指令的零稳态误差控制,利用其谐振控制器的特性对特定次谐波进行补偿.在逆变器带平衡负载和不平衡非线性负载时都能适用。
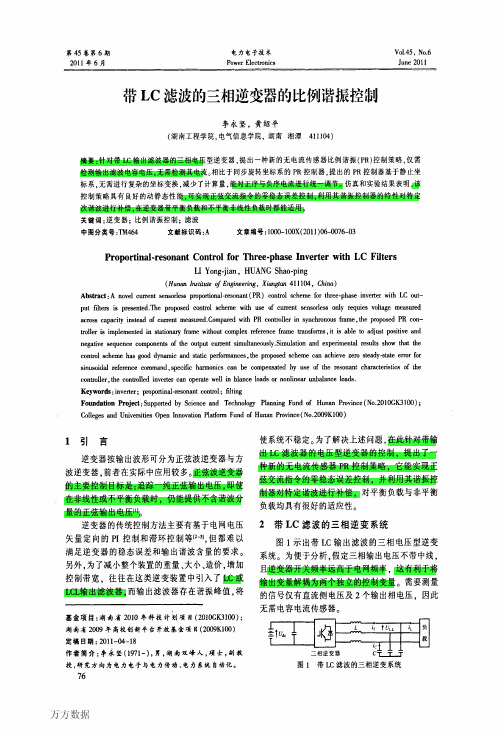
关键词:逆变器;比例谐振控制;滤波中图分类号:TM464文献标识码:A文章编号:1000一lOOX(2011)06—0076—03Proportinal.resonantControlforThree-phaseInverterwithLCFiltersLIYong-jian,HUANGShao・ping(HunanInstituteofEngineering,Xiangtan411104,China)Abstract:Anovelcurrentsensor]essproportional・resonant(PR)controlschemeforthree・phaseinverterwithLCout—putfiltersispresented.Theproposedcontrolschemewithuseofcurrentsensorlessonlyrequiesvoltagemeasuredacrosscapacityinsteadofcurrentmeasured.ComparedwithPRcontrollerinsynchronousframe,theproposedPRcon—trollerisimplementedinstationaryframewithoutcomplexreferenceframetransforms,itisabletoadjustpositiveandnegativesequencecomponentsoftheoutputcurrentsimultaneously.Simulationandexperimentalresultsshowthatthecontrolschemehasgooddynamicandstaticperformances,theproposedschemecarlachievezerosteady—stateerrorforsinusoidalreferencecommand,specificharmonicscanbecompensatedbyuseoftheresonantcharacteristicsofthecontroller,thecontrolledinvertercanoperatewellinblanceloadsornonlinearunbalanceloads.Keywords:inverter;proportinal—resonantcontrol;tiltingFoundationProject:SupportedbyScienceandTechnologyPlanningFundofHunanProvince(No.2010GK3100);CollegesandUniversitiesOpenInnovationPlatformFundofHunanProvince(No.2009K100)1引言逆变器按输出波形可分为正弦波逆变器与方波逆变器.前者在实际中应用较多。
比例谐振控制算法阐明
比例谐振控制算法分析
目录
0 前言........................................................................................................................................2 1 PR 控制器...............................................................................................................................2 2 准 PR 控制器.........................................................................................................................5 3 准 PR 控制器的参数设置.....................................................................................................6
3.1 ������������ = 0, ������������变化 ..........................................................................................................6 3.2 ������������变化, ������������ = 1 ..........................................................................................................6 4 准 PR 控制器的离散化.........................................................................................................7 附录 A 数字滤波器设计..........................................................................................................9 A.1 脉冲响应不变法........................................................................................................9 A.2 双线性变换法..........................................................................................................10 附录 B 双线性变换法原理....................................................................................................13 B.1 连续时间系统 H(s)的最基本环节..........................................................................13 B.2 积分的数值计算与离散一阶系统..........................................................................13 B.3 连续时间一阶环节的离散实现..........................................................................Байду номын сангаас...14 B.4 高阶连续时间系统的离散实现..............................................................................14
基于比例谐振控制的被动式力矩伺服系统
基于比例谐振控制的被动式力矩伺服系统王哲;王明彦;郭犇【摘要】当被动式力矩伺服系统动态加载时,由于承载系统的主动运动,轴上输出的负载力矩中含有较大的干扰力矩,降低了被动式力矩伺服系统的加载性能. 为了提升加载精度和加载频宽,提出基于比例谐振的控制方法. 通过构建相应频率的比例谐振控制器,实现对期望正弦转矩信号无静差跟踪及有效抑制干扰力矩;提出了单位比例谐振控制器的结构,结合根轨迹及频域设计方法实现了单频率和多频率谐振控制器稳定性参数设计;加入承载系统速度前馈控制,降低加载起始阶段干扰力矩对整个系统及转矩传感器的瞬时冲击. 仿真及实验结果验证了所提方法能够在有扰加载条件下,实现对20 Hz单频率正弦力矩的无静差加载及周期负载力矩的高精度跟踪.%When passive torque servo system is used to simulate load torque, the load torque acted on ac-tuator contains high disturbance torque due to the movement of actuator. In order to realize precise load torque simulation, a novel electric passive torque servo system was proposed, in which proportional reso-nant controller was added to the outer control loop. By embedding proportional resonant controller with the same frequency, sinusoidal torque signal was tracked with zero steady-state error, and disturbance torque caused by periodic motion of loaded actuator was restrained effectively;combining with root locus and frequency domain design method, unit proportional resonant controller was put forward to design pa-rameters of controller;moreover, speed feed-forward compensation method was used to reduce impact of disturbance torque acted on system and torque sensor in the beginning.Simulation and experimental re-sults show that 20 Hz sinusoidal load simulation can be tracked with zero steady-state error and periodic load simulation can be tracked with high precision under dynamic load mode.【期刊名称】《电机与控制学报》【年(卷),期】2015(019)009【总页数】8页(P81-88)【关键词】永磁同步电机;被动式力矩伺服系统;多余力矩;比例谐振控制;前馈控制【作者】王哲;王明彦;郭犇【作者单位】哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨150001;哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨150001;哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨150001【正文语种】中文【中图分类】TM351被动式力矩伺服系统(passive torque serve system,PTSS)是一种按一定梯度为伺服系统施加力矩负荷的力矩伺服系统[1]。
400_Hz中频电源波形多重比例谐振控制策略
" ** "
研究与分析
电器与能效管理技术!"!#$%&!
\N控制策略在工程中应用最广$但 \N控制器 不能实现对正弦信号的无静差控制$受制于中频 电源较小的带宽$又需兼顾稳定裕度的要求$使得 \N控 制 器 的 低 频 增 益 较 低$ 稳 态 误 差 较 大$ 控 制 的稳态和动态特性不能满足要求)#7%* % 重复控制 具有消除周期性扰动的特性$稳态时可以实现无 静差控制$得到较好的输出电压波形$但重复控制 器设计过程复杂$理论设计参数可能与实际相差 较大$降低了设计的有效性% 另外$其无法实现少 于一个周期的动态响应$因此采用其进行控制的 系统动态特性较差$不能满足高性能中频电源的 动态指标要求)'7$* % 无差拍控制通过采用状态观 测器将控制作用提前一拍进行$能够得到较好的 输出品质$但其控制效果对控制对象的数学模型 及参数精确度的依赖性很大$控制系统的鲁棒性 不强% 滑模变结构控制具有较好的动&静态性能$ 但对于逆变电源系统而言$理想的滑模切换面选 取难度大及较高的采样频率要求限制了应用$而 目前只停留在试验阶段)"* % \Y控制器在谐振频 率处理论上的增益是无限的$又能够迅速滤除谐 振频率之外的信号$可以实现对正弦交流信号的 无静差控制$能够满足中频电源对稳态精度的要 求$此外$\Y控制器还具备良好的动态特性$能够 满足中频电源的动态特性要求%
7"""滤波电容(
H"""等效电阻! 考虑电感电阻&死区效
应# (
(>"""负载( '>"""负载电流% 由式!!#可得到相应的连续时间模型% 单相
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
比例谐振控制算法分析目录0 前言 (3)1 PR控制器 (3)2 准PR控制器 (6)3 准PR控制器的参数设置 (7)3.1 ωc=0, KR变化 (7)3.2 ωc变化, KR=1 (7)4 准PR控制器的离散化 (8)附录A 数字滤波器设计 (10)A.1 脉冲响应不变法 (10)A.2 双线性变换法 (12)附录B 双线性变换法原理 (15)B.1 连续时间系统H(s)的最基本环节 (15)B.2 积分的数值计算与离散一阶系统 (15)B.3 连续时间一阶环节的离散实现 (16)B.4 高阶连续时间系统的离散实现 (17)0 前言在整流器和双馈发电机的矢量控制系统中广泛地采用了坐标变换技术,将三相静止坐标系下的电流电压等正弦量转化为同步旋转坐标系下的直流量,这一方面是为了简化系统的模型,实现有功功率和和无功功率的解耦,另一方面是因为PI控制器无法对正弦量实现无静差控制。
坐标变换简化了控制系统外环的设计,却使电流分量互相耦合,造成内环结构复杂,设计困难。
PR控制器可以实现对交流输入的无静差控制。
将PR控制器用于网侧变换器的控制系统中,可在两相静止坐标系下对电流进行调节。
可以简化控制过程中的坐标变换,消除两相静止坐标系下对电流进行调节。
可以简化控制过程中的坐标变换,消除电流d、q轴分量之间的耦合关系,且可以忽略电网电压对系统的扰动作用。
此外,应用PR控制器,易于实现低次谐波补偿,这些都有助于简化控制系统的结构。
1 PR控制器PR控制器,即比例谐振控制器,由比例环节和谐振环节组成,可对正弦量实现无静差控制。
理想PR控制器的传递函数如下式所示:G(s)=K p+K R ss2+ω02式中K p为比例项系数,K R为谐振项系数,ω0为谐振频率。
PR控制器中的积分环节又称广义积分器,可以对谐振频率的正弦量进行幅值积分。
由上式可知,当φ=0时,输出信号为K R∗M2∗((t)sin(ωt))与输入信号相位相同,幅值呈时间线性上升。
当φ=90时,输出信号为:K R∗M 2∗((1ω)sin(ωt)+t∗cos(ωt))当时间稍大时,该值贴近于cos(ωt),从整体看,该谐振器(或称之为广义积分器)是对误差信号的按时间递增。
如下图所示,PR控制器中的积分部分K R s,在谐振频率点达到无穷大的增益,在这个s2+ω02频率点之外几乎没有衰减。
因此,为了有选择地补偿谐波,它可以作为一个直角滤波器。
2 准PR控制器如上所述,与PI控制器相比,PR控制器可以达到零稳态误差,提高有选择地抗电网电压干扰的能力。
但是在实际系统应用中,PR控制器的实现存在两个主要问题:●由于模拟系统元器件参数精度和数字系统精度的限制,PR控制器不易实现●PR控制器在非基频处增益非常小,当电网频率产生偏移时,就无法有效抑制电网产生的谐波。
因此,在PR的基础上,提出了一种易于实现的准PR控制器,既可以保持PR控制器的高增益,同时还可以有效减小电网频率偏移对逆变器输出电感电流的影响。
准PR控制器传递函数为:G(s)=K p+2K Rωc ss2+2ωc s+ω02控制器波特图如下图所示,从图中所示,控制器在基波频率处的幅频特性为A(ω0)=60dB.同时相角裕度为无穷大,因此基本可以实现零稳态误差,同时具有很好的稳态裕度和暂态性能。
3 准PR控制器的参数设置由此可见,除了比例系数外,准PR控制器主要有K R、ωc两个参数。
为了分析每个参数对控制器的影响,可先假设其余参数不变,然后观察这个参数变化时间对系统性能的影响。
3.1 ωc=0, K R变化控制器传递函数的波特图如下图所示,从图中可以看出,K R参数增大时,控制器的峰值增益也增大,而控制器的带宽却没有变化。
因此K R参数和控制器的峰值增益成正比。
3.2 ωc变化, K R=1由下图可知,参数ωc不仅影响控制器的增益,同时还影响控制器截止频率的带宽。
随着ωc的增加,控制器的增益和带宽都会增加(基频增益为K R不变)。
将s=jω代入传递函数,则有:G(jω)=2K Rωc jω−ω2+2ωc jω+ω02=K R1+j(ω2−ω02)/2ωcω根据对带宽的定义,|G (jω)|=K R /√2时,此时计算得到的两个频率之差即为带宽。
令|(ω2−ω02)2ωc ω|=1,经过计算得到准谐振控制器的带宽为:ωc /πHz 。
设电网电压频率允许波动范围为±0.8Hz,则有ωC π=1.6Hz , 即ωC =5Hz4 准PR 控制器的离散化模拟控制器的离散化有两种方式,分别为脉冲响应不变法与双线性变换法,此处采用脉冲响应不变法对其进行离散化PR 控制器的数字实现方法主要有两种,分别是采用Z 算符和采用δ算符对其进行离散化。
G (s )=2K R ωc ss 2+2ωc s +ω02=R c (s−−2ωc +4ωc −4ω02)(s−−2ωc −4ωc −4ω02)=R c (s+ωc −√ωc −ω0)(s+ωc +√ωc −ω0)=(s+ωc −√ωc −ω0)(s+ωc +√ωc −ω0),其中A =K R ωC (1C√ωc −ω0); B =K R ωC (1+C√ωc −ω0将上式通过脉冲响应不变法转成z 变换,得:G(z)=AZZ−e−(ωc−√ωc−ω0)TBZZ−e−(ωc+√ωc−ω0)T=1−z−1(e −(ωc−√ωc−ω02)T)1−z−1(e−(ωc+√ωc−ω02)T),设C=(e−(ωc−√ωc2−ω02)T);D=(e−(ωc+√ωc2−ω02)T),则:G(z)=A1−z−1C +B1−z−1D=(A+B)−(AD−BC)z−11−(C+D)z−1+CDz−2设Y=GX,则转成差分函数后,该式可表达成:y(n)=(C+D)y(n−1)−CDy(n−2)+(A+B)x(n)−(AD−BC)x(n−1)其中:A=K RωC(1C√ωc−ω0); B=K RωC(1C√ωc−ω0)C=(e−(ωc−√ωc2−ω02)T);D=(e−(ωc+√ωc2−ω02)T)附录A 数字滤波器设计通常利用模拟滤波器的理论和设计方法来设计IIR数字滤波器。
其设计的过程是:先根据技术指标要求设计出一个相应的模拟低通滤波器,得到模拟低通滤波器的传递函数H a(s),然后再按照一定的转换关系将设计好的模拟滤波器的传输函数H a(s)转换成为数字滤波器的系统函数H(z)。
转换方法有两种:脉冲响应不变法和双线性映射法。
利用模拟滤波器设计数字滤波器,就是从已知的模拟滤波器传递函数H a(s)设计数字滤波器传递函数H(z),这是一个由s平面到z平面的映射变换,这种映射变换应遵循两个基本原则:1.H(z)的频响要能模仿H a(s)的频响,即S平面的虚轴应能映射到z平面的单位圆e jω上2.H a(s)的因果稳定性映射到H(z)后保持不变,即S平面从左半平面Re(s)<0映射到z平面的单位圆内|z|<1A.1 脉冲响应不变法利用模拟滤波器理论设计数字滤波器,也就是使得数字滤波器能模仿模拟滤波器的特性,这种模仿可从不同角度出发。
脉冲响应不变法就是从滤波器的脉冲响应出发,使数字滤波器的单位脉冲响应序列h(n)模仿模拟滤波器的冲击响应h a(t),使h(n)正好等于h a(t)的采样值,即:h(n)=h a(nT)T为采样周期。
如以H a(s)和H(z)分别表示h a(t)的拉氏变换及h(n)的z变换,即:H a(s)=L[h a(t)],H(z)=Z[h(n)]按照采样序列z变换及模拟信号拉氏变换的关系,得:H(z)|z=e sT=1T ∑H a(s+j2πTm)∞m=−∞上式表明,采用脉冲响应不变法将模拟滤波器变换为数字滤波器时,它所完成的s平面到z平面的变换,正是以前讨论的拉氏变换到z变换的标准变换关系,即首先对H a(s)作周期延拓,然后再经过z=e sT的映射关系映射到z平面上。
z=e sT的映射关系表明,s平面上每一条2π/T的横带部分,都将重叠地映射到Z平面的全部平面上。
每个横带在左半部分映射到z平面单位圆以内,每个横带的右半部分映射到z平面单位圆以外,jΩ轴映射在单位圆上,但jΩ轴上每一段2π/T都对应于绕单位圆一周。
如下图所示,相应的频率变换关系为:ω=ΩT,显然ω与Ω之间为线性关系。
(其中ω为数字域频率;Ω为模拟域频率)应当指出,z=e sT的映射关系反映的是H a(s)的周期延拓与H(z)的关系,而不是H a(s)本身与H(z)的关系,因此,在使用脉冲响应不变法时,从H a(s)到H(z)并没有一个由S平面到Z平面的简单代数映射关系,即没有一个s=f(z)的代数关系式。
另外,数字滤波器的频响也不是简单地重现模拟滤波器的频响应,而是模拟滤波器频响的周期延拓,周期为Ωs=2πT=2πf s。
即H(e jω)=1T ∑H a(jΩ+j2πmT)∞m=−∞=1T∑H a(jω+2πmT)∞m=−∞根据香农采样定律,如果模拟滤波器的频响带限于折叠频率Ωs/2以内,即H a(jΩ)=0,|Ω|≥π/T这时,数字滤波器的频响才能不失真地重现模拟滤波器的频响(在折叠频率以内)H(e jω)=1T H a(jωT),|ω|<π但任何一个实际的模拟滤波器,其频响应都不可能是真正带限的,因此不可避免地存在频谱的交叠,即频谱混淆,这时数字滤波器的频响将不同于原模拟滤波器的频响而带来一定的失真。
模拟滤波器频响在折叠频率以上衰减越大,失真则越小,这时采用脉冲响应不变法设计的数字滤波器才能有良好的效果。
A.2 双线性变换法脉冲响应不变法的主要缺点是频谱交叠产生的混淆,这是从S 平面到Z 平面的标准变换z =e sT 的多值对应关系导致的,为了克服这一缺点,设想变换分为两步:1. 将整个S 平面压缩到S1平面的一条横带2. 通过标准变换将此横带变换到整个Z 平面上去由此建立的S 平面与Z 平面一一对应的单值关系,消除了多值性,也就消除了混淆现象。
为了将S 平面的jΩ轴压缩到S1平面的jΩ轴上的−πT ~πT 一段上,可通过以下正切变换实现:Ω=C ∗tg (Ω1T 2)此处C 是待定系数,通常取C=2/T 。
用不同的方法确定C ,可使模拟滤波器的频率特性与数字滤波器的频率特性在不同的频率点有对应关系。
经过这样的频率变换,当Ω1在−πT ~πT 段变化时,Ω在−∞~∞段变动,映射了整个jΩ轴。
将这一解析关系延拓到整个S 平面,即得到S 平面-〉S1平面的映射关系:s =C ∗tg (s 1T 2)= C ∗sin(s 1T2)cos(s 1T 2)= C ∗e j s 1T 2−e −j s 1T 2ej s 1T 2+e−j s 1T 2= C ∗1−e −js 1T1+e −js 1T再将S1平面通过标准变换映射到Z 平面,即令:z =e sT最后得到S 平面到Z 平面的单值映射关系。