机器人ppt描述
合集下载
扫地机器人简介PPT课件

适应不同的环境条件
扫地机器人可以通过传感器和导航技术,适应不同的环境 条件。例如,有些扫地机器人可以自动适应不同的房间大 小和布局,以及清洁难以到达的区域。
提高清洁效率
扫地机器人可以通过自动化和智能化的方式,提高清洁效 率。例如,有些扫地机器人可以通过导航技术规划最短的 清扫路线,或者同时清洁多个房间。
05
实际应用
实际应用
帮助忙碌的家庭减少清扫时间
01
扫地机器人可以自动清扫地面,减轻了家庭成员的清
扫压力,节省了宝贵的时间和精力。
保持家庭环境清洁
02 扫地机器人的清扫功能可以帮助去除地面的灰尘和污
垢,保持家庭环境的清洁和卫生。
提高生活质量
03
通过使用扫地机器人,家庭成员可以将更多的时间和
精力投入到工作、学习和娱乐中,提高了生活质量。
发展趋势
技术进步
更智能的导航技术、更高效的清洁技术、远程控制和 互联网连接。随着技术的不断进步,扫地机器人将采 用更智能的导航技术,例如使用更先进的传感器和算 法进行地图构建和路径规划。同时,清洁技术也将变 得更加高效,例如使用更大的吸尘功率和更智能的清 洁策略。此外,远程控制和互联网连接也将成为未来 扫地机器人的发展趋势,使用户可以通过智能手机或 智能音箱进行控制和监控。
市场趋势
更多品牌进入市场、价格竞争加剧、用户普及度提高。 随着技术的不断发展和成本的降低,越来越多的品牌将 进入扫地机器人市场,导致市场竞争加剧。同时,随着 用户对扫地机器人认知度的提高和购买力的增强,用户 普及度也将不断提高。
发展趋势
• 环境因素:适应不同的清洁需求和环境条件,如地毯、硬木地板等。未来扫地机器人将能够适应不同的清洁需 求和环境条件。例如,针对地毯和硬木地板等不同材质的地面,扫地机器人将采用不同的清洁策略和刷头设计 。此外,针对不同的清洁需求,例如清洁家具底部和汽车内部等难以到达的区域,扫地机器人也将进行特殊设 计和功能优化。
扫地机器人可以通过传感器和导航技术,适应不同的环境 条件。例如,有些扫地机器人可以自动适应不同的房间大 小和布局,以及清洁难以到达的区域。
提高清洁效率
扫地机器人可以通过自动化和智能化的方式,提高清洁效 率。例如,有些扫地机器人可以通过导航技术规划最短的 清扫路线,或者同时清洁多个房间。
05
实际应用
实际应用
帮助忙碌的家庭减少清扫时间
01
扫地机器人可以自动清扫地面,减轻了家庭成员的清
扫压力,节省了宝贵的时间和精力。
保持家庭环境清洁
02 扫地机器人的清扫功能可以帮助去除地面的灰尘和污
垢,保持家庭环境的清洁和卫生。
提高生活质量
03
通过使用扫地机器人,家庭成员可以将更多的时间和
精力投入到工作、学习和娱乐中,提高了生活质量。
发展趋势
技术进步
更智能的导航技术、更高效的清洁技术、远程控制和 互联网连接。随着技术的不断进步,扫地机器人将采 用更智能的导航技术,例如使用更先进的传感器和算 法进行地图构建和路径规划。同时,清洁技术也将变 得更加高效,例如使用更大的吸尘功率和更智能的清 洁策略。此外,远程控制和互联网连接也将成为未来 扫地机器人的发展趋势,使用户可以通过智能手机或 智能音箱进行控制和监控。
市场趋势
更多品牌进入市场、价格竞争加剧、用户普及度提高。 随着技术的不断发展和成本的降低,越来越多的品牌将 进入扫地机器人市场,导致市场竞争加剧。同时,随着 用户对扫地机器人认知度的提高和购买力的增强,用户 普及度也将不断提高。
发展趋势
• 环境因素:适应不同的清洁需求和环境条件,如地毯、硬木地板等。未来扫地机器人将能够适应不同的清洁需 求和环境条件。例如,针对地毯和硬木地板等不同材质的地面,扫地机器人将采用不同的清洁策略和刷头设计 。此外,针对不同的清洁需求,例如清洁家具底部和汽车内部等难以到达的区域,扫地机器人也将进行特殊设 计和功能优化。
《仿生机器人介绍》PPT课件ppt

01
救援与搜救
在灾难现场、搜救任务等危险环境中,仿生机器人可以代替人类进行高风险任务,提高救援效率。
02
医疗与护理
仿生机器人可以用于手术、康复训练、护理等领域,提高医疗水平和服务质量。
03
生产与制造
在生产线、农业、矿业等行业中,仿生机器人可以实现自动化、智能化生产,提高生产效率和降低成本。
第一代仿生机器人
运动学与动力学建模
环境感知与控制技术是仿生机器人的重要技术之一,它能够让机器人感知周围环境并做出相应的反应。
总结词
环境感知技术包括传感器、数据处理和模式识别等多个方面,它能够让机器人感知到周围环境中的各种信息,如光线、温度、湿度、磁场等。通过这些信息,仿生机器人可以做出相应的反应,实现更为智能化的功能。例如,通过感知光线强度,仿生机器人可以在不同的光照条件下进行拍摄;通过感知温度变化,仿生机器人可以实现对温度的精确控制等。
仿生机器人设计需要借鉴生物体的形态、结构和运动方式,将这些特点融入到机械设计中,以实现更为高效、自然的运动和功能。例如,模仿鸟类的翅膀结构,可以设计出能够飞翔的无人机;模仿鱼类的游动方式,可以设计出能够水中潜行的潜艇等。
总结词
详细描述
总结词
运动学与动力学建模是仿生机器人的核心技术之一,通过建模可以实现对机器人运动和功能的精确控制。
02
例如,鹰仿生机器人可以模拟鹰的飞行方式和猎食行为,用于侦查、打击等任务。
鸽子仿生机器人可以模拟鸽子的飞行方式和导航能力,用于情报传递、搜救等领域。
海洋生物仿生机器人
海洋生物仿生机器人是一种模仿海洋生物运动方式和外观的机器人,具有防水、防腐蚀、抗流体力学等特点。
例如,海豚仿生机器人可以模拟海豚的游泳方式和跃水行为,用于水下探测、海洋环境监测等领域。
机器人的组成结构(PPT52页)
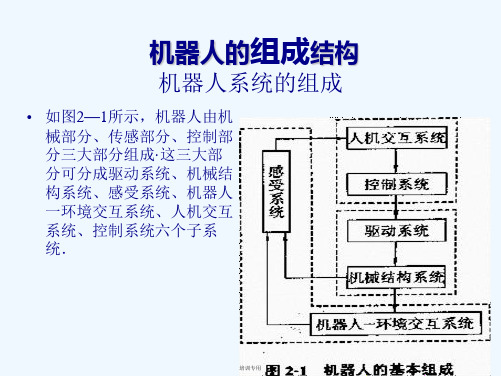
• 感受系统 它由内部传感器模块和外部传感器模块组成,获 取内部和外部环境状态中有意义的信息.智能传感器的使 用提高了机器人的机动性、适应性和智能化的水准.人类 的感受系统对感知外部世界信息是极其灵巧的,然而,对 于一些特殊的信息,传感器比人类的感受系统更有效.
• 机器人一环境交互系统 机器人一环境交互系统是实现机器人与外部环境中的设备相 互联系和协调的系统.机器人与外部设备集成为一个功能单 元,如加工制造单元、焊接单元、装配单元等
度,即重复度。
培训专用
工作空间(Working space):机器人手腕 参考点或末端操作器安装点(不包括末端 操作器)所能到达的所有空间区域,一般 不包括末端操作器本身所能到达的区域。
培训专用
工业机器人的机械结构
工业机器人的机械本体类似于具备上肢机能的机械手 ,由 手部、腕部、臂、机身(有的包括行走机构)组成。
培训专用
• 正弦波电动机(交流无刷伺 服电动机):顾名思义,它 是由正弦波电流驱动的。对 三相情况,电流相位差 120。,而且这三相电流是 随转子位置不同而不同的, 也就是说,转子的位置检测 需更精确,驱动电路也比梯 形波电动机的更复杂,但却 代表着无刷电动机最高水平, 因为它能保持恒定转矩输出
培训专用
加入速度反馈。一般直流电动机和位置反馈、速度反馈形成 一个整体,即通常所说的直流伺服电机。由于采用闭环伺 服控制,所以能实现平滑的控制和产生大的力矩
• 当今大部分机器人都采用直流伺服电机驱动机器人的各个关节, 但它们也有一些缺点,如转速不能太高
• 近年来,新发展起来的无刷直(交)流伺服电动机克服了 上述缺点,并保留了直流伺服电动机的优点,因此无刷电 动机逐渐取代了直流伺服电动机
培训专用
相关术语及性能指标
• 机器人一环境交互系统 机器人一环境交互系统是实现机器人与外部环境中的设备相 互联系和协调的系统.机器人与外部设备集成为一个功能单 元,如加工制造单元、焊接单元、装配单元等
度,即重复度。
培训专用
工作空间(Working space):机器人手腕 参考点或末端操作器安装点(不包括末端 操作器)所能到达的所有空间区域,一般 不包括末端操作器本身所能到达的区域。
培训专用
工业机器人的机械结构
工业机器人的机械本体类似于具备上肢机能的机械手 ,由 手部、腕部、臂、机身(有的包括行走机构)组成。
培训专用
• 正弦波电动机(交流无刷伺 服电动机):顾名思义,它 是由正弦波电流驱动的。对 三相情况,电流相位差 120。,而且这三相电流是 随转子位置不同而不同的, 也就是说,转子的位置检测 需更精确,驱动电路也比梯 形波电动机的更复杂,但却 代表着无刷电动机最高水平, 因为它能保持恒定转矩输出
培训专用
加入速度反馈。一般直流电动机和位置反馈、速度反馈形成 一个整体,即通常所说的直流伺服电机。由于采用闭环伺 服控制,所以能实现平滑的控制和产生大的力矩
• 当今大部分机器人都采用直流伺服电机驱动机器人的各个关节, 但它们也有一些缺点,如转速不能太高
• 近年来,新发展起来的无刷直(交)流伺服电动机克服了 上述缺点,并保留了直流伺服电动机的优点,因此无刷电 动机逐渐取代了直流伺服电动机
培训专用
相关术语及性能指标
《工业机器人认识》PPT课件

机器人运动控制系统软件的特点 1)机器人工作任务是要求机器人的末
端执行器(例如焊接机器人的焊钳或焊 枪)进行空间点位运动或轨迹运动。 2)机器人的控制中经常使用复杂控制 技术 3)用人工智能的方法进行控制、决策、 管理和操作
.
52
1.4.4 工业机器人运动控制程序的编程方 式 1. 示教盒示教方式
工业机器人的分类
. 40
工业机器人的分类
. 41
1.2 工业机器人的类型
1. 搬运机器人
. 42
1.3 工业机器人的结构
目前的工业机器人多为6轴关节型机器人。
6轴关节型机器人有 三个“关节”:“肩关 节”、“肘关节”、“腕 关节”。而6轴是指: 转腰轴、摆臂(肩) 轴、摆肘轴、转腕轴、 摆腕轴和转手轴
34精选ppt工业机器人的分类工业机器人的分类35精选ppt工业机器人的分类工业机器人的分类36精选ppt工业机器人的分类工业机器人的分类五种基本坐标式机器人37精选ppt工业机器人的分类工业机器人的分类38精选ppt工业机器人的分类工业机器人的分类39精选ppt工业机器人的分类工业机器人的分类40精选ppt工业机器人的分类工业机器人的分类41精选ppt1212工业机器人的类型工业机器人的类型搬运机器人42精选ppt1313工业机器人的结构工业机器人的结构目前的工业机器人多为6轴关节型机器人
.
25
机 器 人 的 控 制 过 程
.
26
工业机器人的控制方式
1. 示教再现控制
通过示教器把作业内容变制成程序,输入到 记忆装置中。给出启动命令后,系统从存储 单元中读出信息并送到控制装置,控制装置 发出控制信号,由驱动机构控制机械手在一 定精度范围内按照存储单元中的内容完成各 种动作。
端执行器(例如焊接机器人的焊钳或焊 枪)进行空间点位运动或轨迹运动。 2)机器人的控制中经常使用复杂控制 技术 3)用人工智能的方法进行控制、决策、 管理和操作
.
52
1.4.4 工业机器人运动控制程序的编程方 式 1. 示教盒示教方式
工业机器人的分类
. 40
工业机器人的分类
. 41
1.2 工业机器人的类型
1. 搬运机器人
. 42
1.3 工业机器人的结构
目前的工业机器人多为6轴关节型机器人。
6轴关节型机器人有 三个“关节”:“肩关 节”、“肘关节”、“腕 关节”。而6轴是指: 转腰轴、摆臂(肩) 轴、摆肘轴、转腕轴、 摆腕轴和转手轴
34精选ppt工业机器人的分类工业机器人的分类35精选ppt工业机器人的分类工业机器人的分类36精选ppt工业机器人的分类工业机器人的分类五种基本坐标式机器人37精选ppt工业机器人的分类工业机器人的分类38精选ppt工业机器人的分类工业机器人的分类39精选ppt工业机器人的分类工业机器人的分类40精选ppt工业机器人的分类工业机器人的分类41精选ppt1212工业机器人的类型工业机器人的类型搬运机器人42精选ppt1313工业机器人的结构工业机器人的结构目前的工业机器人多为6轴关节型机器人
.
25
机 器 人 的 控 制 过 程
.
26
工业机器人的控制方式
1. 示教再现控制
通过示教器把作业内容变制成程序,输入到 记忆装置中。给出启动命令后,系统从存储 单元中读出信息并送到控制装置,控制装置 发出控制信号,由驱动机构控制机械手在一 定精度范围内按照存储单元中的内容完成各 种动作。
机器人ppt课件

算法与模型
控制算法
机器学习与深度学习模型
用于实现机器人的运动控制,如PID 控制、模糊控制等。
用于提高机器人智能水平,如物体分 类、语义分割等。
感知算法
处理机器人感知数据,如目标检测、 跟踪、辨认等。
05
机器人的未来发展
技术发展趋势
人工智能技术
随着机器学习、深度学习等人工 智能技术的不断发展,机器人将 具备更高级的认知和决策能力, 实现更精准、高效的任务执行。
技术伦理
随着机器人具备更高级的认知能力,技术伦理问题逐渐凸显,需要 关注人权、道德和责任等方面的问题。
06
机器人案例分析
家用服务机器人
家庭清洁机器人
负责家庭地面清洁工作,具备自主导航、避障和 智能控制功能,提高家庭清洁效率。
智能音箱
作为智能家居的控制中心,提供语音助手服务, 实现家电控制、信息查询和娱乐等功能。
交互技术
交互技术
使机器人能够与人或其他智能体进行交流和 互动。
自然语言处理
让机器人能够理解人类自然语言文本指令, 进行文本分析和语义理解。
语音辨认与合成
让机器人能够辨认和理解人类语音指令,并 生成语音反馈。
人机交互
通过触摸屏、手势辨认等技术,实现人机交 互,提高机器人的易用性和用户体验。
03
机器人的硬件结构
机器人ppt课件
汇报人:
xx年xx月xx日
• 机器人概述 • 机器人的关键技术 • 机器人的硬件结构 • 机器人的软件系统 • 机器人的未来发展 • 机器人案例分析
目录
01
机器人概述
机器人的定义与分类
定义
机器人是一种能够自动执行任务 的机器系统,具有感知、思考、 动作三个基本要素。
[课件](工业机器人)位姿描述与齐次变换PPT
位姿描述与齐次变换PPT](https://img.taocdn.com/s3/m/711ba841caaedd3383c4d3c4.png)
六、齐次表达
根据几何学知识,上面第四小节中给定点的绝对位置为:
Ap b a b a b a c s cs b a
写成三维形式,有:
a a a c s 0a Apbbbs c 0b
3. 试按照运动顺序计算相关基本变换矩阵相乘结果
c s 0 a
Tra(An a,A sb,A0)Ro(zA t,)s0
c
0
0 b 1 0
0
1
4. 计算结果比较
两种方法结果相同!但后一种方法简单!
问题:是否仅仅按照运动变换顺序将相关的基本变 换矩阵相乘,即可以得到齐次变换阵?
0 0 0 0 0 10
O B 在A中位置,记作 A pOB
B在
A 中姿态,记作
A B
R
。
分成两块,不便于记忆!
齐次变换矩阵
若写成如下齐次形式,有:
c s 0 aa
A 1ps0 0
c
0 0
0 1 0
A 中的位置,然后与
b
A坐标原点值相加即可
得到该点绝对位置。
OA
由几何法,得:
aacbs 写成矩阵形式
b as bc
Y A
YB
b
b
XB a
OB
a
X A
a
XA
相
a c sa 对
bs cb
坐 标 值
b 1 0b 1 0B A 0R
Ap 1OBB 1pA BTB 1p
七、齐次变换矩阵
1. 构成:分为4块。左上角是姿态矩阵,为一单位正交 矩阵;右上角为对象坐标系原点位置值;左下角为 三个0 0 0,简记为0;右下角为1。
根据几何学知识,上面第四小节中给定点的绝对位置为:
Ap b a b a b a c s cs b a
写成三维形式,有:
a a a c s 0a Apbbbs c 0b
3. 试按照运动顺序计算相关基本变换矩阵相乘结果
c s 0 a
Tra(An a,A sb,A0)Ro(zA t,)s0
c
0
0 b 1 0
0
1
4. 计算结果比较
两种方法结果相同!但后一种方法简单!
问题:是否仅仅按照运动变换顺序将相关的基本变 换矩阵相乘,即可以得到齐次变换阵?
0 0 0 0 0 10
O B 在A中位置,记作 A pOB
B在
A 中姿态,记作
A B
R
。
分成两块,不便于记忆!
齐次变换矩阵
若写成如下齐次形式,有:
c s 0 aa
A 1ps0 0
c
0 0
0 1 0
A 中的位置,然后与
b
A坐标原点值相加即可
得到该点绝对位置。
OA
由几何法,得:
aacbs 写成矩阵形式
b as bc
Y A
YB
b
b
XB a
OB
a
X A
a
XA
相
a c sa 对
bs cb
坐 标 值
b 1 0b 1 0B A 0R
Ap 1OBB 1pA BTB 1p
七、齐次变换矩阵
1. 构成:分为4块。左上角是姿态矩阵,为一单位正交 矩阵;右上角为对象坐标系原点位置值;左下角为 三个0 0 0,简记为0;右下角为1。
机器人发展史描述ppt课件2024新版

应用领域扩展
随着技术的不断进步,机器人的应用领域也在不断扩展。除了传统的工业领域外,机器人 还被应用于医疗、教育、娱乐、军事等领域。
未来发展趋势
未来机器人技术将继续向着智能化、自主化、协同化等方向发展。同时,随着人工智能技 术的不断进步和应用需求的不断增长,机器人将在更多领域发挥重要作用。
02
早期机器人探索与尝试
应对复杂环境。
自主导航与定位技术的发展
02
解决机器人在复杂环境中的自主导航和定位问题,提高其行动
的自由度和准确性。
多机器人协同技术的突破
03
实现多个机器人之间的协同作业,提高整体工作效率和应对能
力。
伦理、法律和社会问题思考
机器人伦理准则的制定
制定机器人设计和使用的伦理准则,确保机器人的行为符合社会 道德和伦理标准。
03
服务机器人兴起
20世纪90年代至今,随着人工智能和计算机视觉等技术的快速发展,
服务机器人开始逐渐兴起。它们被应用于家庭、医疗、教育等领域,为
人们提供更加便捷的生活服务。
当代机器人技术现状
技术创新
当代机器人技术不断创新,涉及机械、电子、计算机、人工智能等多个领域。机器人变得 更加智能化、自主化和多样化。
THANKS
机器人应用场景的拓展
从工业制造到医疗、教育、服务等领域,机器人 的应用场景将不断拓展,为人类生活带来更多便 利。
人机协作模式的深化
未来机器人将更多地与人类共同工作,形成紧密 的人机协作关系,提高生产效率和工作质量。
技术挑战与解决方案探讨
感知与认知能力的提升
01
提高机器人的感知精度和认知能力,使其能够更准确地理解和
古代自动机械装置
01
随着技术的不断进步,机器人的应用领域也在不断扩展。除了传统的工业领域外,机器人 还被应用于医疗、教育、娱乐、军事等领域。
未来发展趋势
未来机器人技术将继续向着智能化、自主化、协同化等方向发展。同时,随着人工智能技 术的不断进步和应用需求的不断增长,机器人将在更多领域发挥重要作用。
02
早期机器人探索与尝试
应对复杂环境。
自主导航与定位技术的发展
02
解决机器人在复杂环境中的自主导航和定位问题,提高其行动
的自由度和准确性。
多机器人协同技术的突破
03
实现多个机器人之间的协同作业,提高整体工作效率和应对能
力。
伦理、法律和社会问题思考
机器人伦理准则的制定
制定机器人设计和使用的伦理准则,确保机器人的行为符合社会 道德和伦理标准。
03
服务机器人兴起
20世纪90年代至今,随着人工智能和计算机视觉等技术的快速发展,
服务机器人开始逐渐兴起。它们被应用于家庭、医疗、教育等领域,为
人们提供更加便捷的生活服务。
当代机器人技术现状
技术创新
当代机器人技术不断创新,涉及机械、电子、计算机、人工智能等多个领域。机器人变得 更加智能化、自主化和多样化。
THANKS
机器人应用场景的拓展
从工业制造到医疗、教育、服务等领域,机器人 的应用场景将不断拓展,为人类生活带来更多便 利。
人机协作模式的深化
未来机器人将更多地与人类共同工作,形成紧密 的人机协作关系,提高生产效率和工作质量。
技术挑战与解决方案探讨
感知与认知能力的提升
01
提高机器人的感知精度和认知能力,使其能够更准确地理解和
古代自动机械装置
01
工业机器人应用技术课件ppt(PPT163张)可修改文字

一、机器人控制系统的特点
(3)具有较高的重复定位精度,系统刚性好。除直角坐标机器 人外,机器人关节上的位置检测元件不能安装在末端执行器上,而 应安装在各自的驱动轴上,构成位置半闭环系统。但机器人的重复 定位精度较高,一般为±0.1 mm。此外,由于机器人运行时要求 运动平稳,不受外力干扰,为此系统应具有较好的刚性。
(5-20)
随此着外实 ,际还工要作考情虑的况各作的关不节业同之,间信可惯息以性采力存用、各哥储种氏在不力同等内的的控耦存制合中方作式用,。和重在力执负载行的影任响务,因时此,,系依统中靠还经工常业采用机一些器控人制策的略,动如重力补偿、
前馈、解耦或自适应控制等。
与在自由空间运作动再的控现制相功比能,机,器人可在重受限复空间进运行动的该控制作主业要是。增加此了外对其,作用从端操与外作界接的触角作用度力(来包看括力,矩)要的控制要求,
图5-1 机器人控制系统的分类
二、机器人控制系统的组成
图5-2 机器人控制系统组成框图
二、机器人控制系统的组成
(1)控制计算机。控制计算机是控制系统的调度指挥机 构,一般为微型机,微处理器分为32位、64位等,如奔腾 系列CPU等。
(2)示教编程器。示教机器人的工作轨迹、参数设定和 所有人机交互操作拥有自己独立的CPU及存储单元,与主 计算机之间以串行通信方式实现信息交互。
因而受限运动的控制一般称为力控制。
四现、场机 总器线人应智用能于求力生控控产制现制方场法,系在统微机具化测有量良控制好设备的之人间实机现双界向面多结,点数尽字量通信降,从低而对形成操了新作型者的网的络集要成求式全。分布因控制系统—— 现位场置总 控线制控部制分系的此统输,出(fieΔl多dqb1u和数s速co度情nt控ro况制l s部y要s分tem的求,输F控出CΔS制q)。2相器加,的其设和作计为机人器员人的不关节仅控要制增完量Δ成q,底用于层控伺制机服器人控的制运动器。