一种纳米级二维微定位工作台的设计与分析
数控车床工作台二维运动伺服进给系统设计

数控车床工作台二维运动伺服进给系统设计摘要:数控车床在制造业中起着至关重要的作用。
为了提高生产效率和产品质量,设计一个稳定可靠、精确灵活的二维运动伺服进给系统尤为重要。
本文将针对数控车床工作台的二维运动伺服进给系统进行设计,包括运动控制算法、驱动器选型、传感器选择等方面。
1.引言数控车床是一种以电子技术、计算机技术和车床技术为基础的现代化机床。
它通过运动控制系统实现工作台的运动,可以实现复杂的加工工艺。
二维运动伺服进给系统是数控车床的核心部件之一2.运动控制算法运动控制算法是二维运动伺服进给系统的核心技术之一、常用的运动控制算法包括PID控制算法、自适应控制算法等。
PID控制算法是一种经典的,应用广泛的控制算法,它根据测量值与期望值的差异计算出控制量,并对系统进行修正。
自适应控制算法则是根据系统的参数变化自动地调整控制参数。
在设计二维运动伺服进给系统时需要根据实际情况选择合适的控制算法。
3.驱动器选型驱动器是实现工作台运动的关键部件,它将控制信号转换为电力信号,驱动电机工作。
在选择驱动器时需要考虑工作台的负载情况、速度要求和精度要求等因素。
常用的驱动器有直流伺服驱动器、交流伺服驱动器和步进驱动器等。
在设计二维运动伺服进给系统时需要根据实际情况选择合适的驱动器。
4.传感器选择传感器可以实现对工作台位置、速度和负载等参数的测量,是二维运动伺服进给系统的重要组成部分。
根据需要可以选择位置传感器、速度传感器和负载传感器等。
常用的位置传感器有编码器、激光干涉仪等,速度传感器有霍尔传感器、光电传感器等,负载传感器有压力传感器、力传感器等。
在设计二维运动伺服进给系统时需要根据实际需求选择合适的传感器。
5.结论设计一个稳定可靠、精确灵活的二维运动伺服进给系统对于提高数控车床的加工精度、提高生产效率具有重要意义。
本文针对数控车床工作台的二维运动伺服进给系统进行了详细的设计,包括运动控制算法、驱动器选型、传感器选择等方面。
基于柔性铰链结构的二维微动工作台的设计分析
sif e so h t g a re u y u i g t ep r me rca a y i.A e d sg e h d i d ca e n t ep p ri tf s ft e s a e i c r id o t sn h a a t i n l ss n s b n w e i nm t o s e l r d i h a e n
图 1 微 动 台传 动 机 构 简 图
2 微 动 台的 设 计 分 析
微动 工作 台的设计 应满 足下 列要 求 : ( )柔性 铰链 内部 的弯 曲应 力应 小 于 材料 的许 1
基 于 柔性 铰 链 结构 的 二 维微 动 工 作 台的设 计 分 ቤተ መጻሕፍቲ ባይዱ
张建 雄 , 宝元 孙
( 大连理工大学 ,精密与特种加 工教育部重点实验室 , 宁 大连 1 62 ) 辽 1 03
摘
要 : 绍 了 基 于 压 电 陶 瓷 驱 动 器 ( Z 驱 动 的 二 维 微 动 工作 台 。该 微 动 台 采 用 双 柔 性 平 行 四连 杆 结 构 , 介 P T)
运用 参 数 化 的分 析 方 法 求 得 铰 链 各 尺 寸 对 微 动 台 固有 频 率 、 力 以及 刚度 的 影 响 , 理 论 分 析 、 限 元 计 算 和 试 验 应 将 有 测 试 的结 果 相 结 合 , 出 了一 种微 动 台 的 设 计 方 法 。 提 关 键 词 : 电 陶 瓷驱 动 器 ( Z ) 微 动 工 作 台 ; 性 铰 链 ; 数 化法 压 PT; 柔 参
Ab ta t A o e - sr c : n v l DOF n n p st n n tg rv d b T i d s r e h sp p r. t sb s d o h u l 2 a o o i o i gs a ed i e y PZ s i e i d i t i a e I a e n t ed a- i b n i
二维精密工作台设计

⼆维精密⼯作台设计⽬录第⼀节《测控仪器课程设计》要求 (1)第⼆节国内外现状 (2)第三节⽅案设计 (5)第四节测量控制⽅法设计 (13)第五节未来展望与总结 (18)参考⽂献 (20)第⼀节《测控仪器课程设计》要求⼀课程设计⽬的:测控仪器课程设计是⼀次⽐较完整的仪器设计,它是理论联系实际、培养初步设计能⼒的重要教学环节,完成课程设计的⽬的有⼀下⼏点:(1)培养学⽣综合地考虑使⽤、经济、⼯艺、安全性等⽅⾯的设计要求,确定合理的设计⽅案。
(2)测控仪器设计是综合光学,电学,机械学,控制等多门课程的⼀个系统⼯程,培养学⽣从全局出发,体会各个学科融合的⼀次实战演练。
(3)培养学⽣仔细阅读本课程指导书和随时查阅有关教材。
(4)通过分析⽐较吸取现有结构中的优点,并在此基础上发挥⾃⼰的创造性,⽽不是简单抄袭或没有根据在臆造;(5)培养学⽣制图功底,训练学⽣通过计算参数,最后完成设计制图的能⼒,(6)了解国内外的技术前沿,以及现有企业可以提供的各种封装产品技术参数。
⼆课程设计技术要求课题名称:基于CCD边缘检测的⼆维测量系统设计要求:1. ⼆维精密⼯作台系统X轴⾏程范围10mm,分辨率0.1um,精度要求0.5um;Y轴⾏程范围10mm,分辨率0.1um,精度要求0.5um;2. CCD测量系统边缘识别,精度要求1um;三设计说明书要求1.根据设计任务要求,确定设计⽅案。
2. 详细讨论系统各部分的实现⽅法和原理。
3.按照技术指标要求计算相应的机械结构参数,有国家标准的零部件,过计算选取。
4.完成设计说明书⼀份,仪器⼯作原理图⼀张,总装配图⼀张(0号),零件图5张以上。
5.提交设计报告书。
要求打印,并列出参考⽂献。
设计说明书要求5000字。
第⼆节国内外现状⼀⼆维精密⼯作台系统随着微电⼦⼯程、计量科学与技术、精密加⼯、纳⽶科学与技术等领域的发展,使微纳⽶定位机构得到了越来越⼴泛的应⽤,各国不断发展微动定位的⼯作,不仅要求有⾼的定位精度,⽽且要求在⽐较⼤的范围内做测量。
直线电机驱动二维精密定位平台的设计研究

基金项 目: 榆林学 院高层次人 才科 研启动基金项 目( 8 K 3 ) 0 G 0 7 作者简 介 : 曹卫锋 (97 ) 男 , 17一 , 陕西 武功人 , 助教 , 在读博 士 , 研究 方 向: 机械设计与制造 的教学 与研 究。
1
Eq i me t u p n Ma ua tig T c n lg . 2 1 n fc r e h oo y No9, 0 2 n
T ANG h - i g , AO Hu - a g , S u yn C i f n MA o q n W ANG e g’ Ru - u , Fn
( . ae t x m n t nC o eai etr f h aet fc B in 0 10C ia 1 P tn E a iai op rt nC ne e t i e ig10 9 ,hn ; o o o T P n O e, j 2 N c a dR da o a t C nr, e ig1 0 8 C ia . ul r n ait nS f y e t B in 0 0 2,hn ) e a i e e j
二维定位平 台总体设计结合 了大范 围超精密定 位系统的技术指标 , 其技术要求如下 : 自由度 : 、 x Y两维 ;
图 1 二 维定 位 平 台 结 构 简 图
在台子 的侧面上 。
收 稿 日期 :0 2 0 - 8 2 1- 6 0 -
重复计算 电机峰值 力和平均连续输 出力 ,校核被选
1 二维定 位平 台的设计
11 总体 设计 .
11. 、7底座导 轨 2上 台 3上 台 电极 动子 4上台输 出部分 5下 台直 . . . . 线 电机 磁轨 6 台光 栅读数头 7下台直线 电机 动子 8 . 上 . . 限位装 机械 置 9 台光栅支架 1 、5 台导 轨 l. . 上 O 1. 上 1 下台光栅支架 1. 台直线 2 上 电机 l . 3 上台光栅读数头 l . 台机械限位 1. 4 上 6 底座
二维精密工作台参考

精密机械与仪器设计课程设计说明书二维数控精密工作台学院:机电与信息工程学院班级:测控技术与仪器08级学号:0811350121姓名:吴桥摘要数控机床是一种高度自动化的机床,随着社会生产和科学技术的迅速发展,机械产品的性能和质量不断提高,改型频繁。
机械加工中,多品种、小批量加工约占80%。
这样,对机床不仅要求具有高的精度和生产效率,而且还要具备“柔性”,即灵活通用,能迅速适应加工零件的变更。
数控机床较好地解决了形状复杂、精密、小批、多变的零件加工问题,具有适应性强、加工精度高、工质量稳定和生产效率高等优点,是一种灵活而高效的自动化机床。
精密数控工作台可广泛应用于激光焊接、层射线扫描、械手检测装置及实用教学领域。
随着电子、自动化、计算机和精密测试等技术的发展,数控机床在机械制造业中的地位将更加重要,而X-Y作台是这些设备实现高精密加工的核心部件,对于提高产品的加工质量起着尤为重要作用。
关键字:数控工作台步进电机控制滚珠导轨目录一、二维数控精密工作台的原理 (1)二、传动方案的确定 (2)三、机械系统设计的整体方案 (2)(一)工作台总体结构的确定 (2)(1)丝杆螺母副的选用 (2)(2)导轨副的选用 (3)(3)联轴器的选用 (3)(4)电动机的选用 (3)(二)绘制总体方案图 (3)(三)工作台质量计算 (4)(四)滚珠丝杆选择 (4)(1)滚珠丝杆工作长度计算 (5)(2)滚珠丝杠副载荷及转速计算 (5)(3)确定预期额定动载额 (6)(4)传动形式和支承方式的选择 (7)(5)滚珠丝杆副稳定性校核 (9)(6)滚珠丝杆副的刚度计算 (10)(五)直线滚动导轨选择计算 (10)(1)导轨型式选择 (10)(2)导轨额定寿命计算 (11)(六)步进电机的计算与选型 (12)(七)联轴器的选定 (14)(八)轴承选择 (15)四、控制系统设计 (15)(一)控制系统总体方案 (15)(二)控制系统具体方案 (16)(三)光栅传感器 (17)五、结论 (18)六、参考资料 (19)一、二维数控精密工作台的原理如图2.1.1所示为二维数控平台实验原理样机原理图,图2.1.2为二维数控平台实物照片。
新型二维压电驱动微动工作台的设计分析

Ke r s:iz cu tr P T )n n p s inn ywo d p eo a ta o ( Z )a o o i o igdlx r i e; EM t e u ehng F
1 引言
随 着 纳米 技 术 的兴 起 和迅 猛 发展 , 于压 电驱 基 动的 纳米 级徽 定 位 技术 已成 为微机 电系统 、 扫描 探 测显微镜 、 精密加工 、 超 细胞操 作等诸 多前 沿技 术的 基础支持 技 术 。尤其 是 多 自由度纳米 级微 定位工 作 台的应 用越来 越受到 重视 。
纳 米 级微 定 位 系统 的传 动副是 柔 性铰 链 , 是 它
一
载的能 力 , 体现 了运 动副 的柔性 程度 , 也 是主要 的 研
究因素 口 ]本 文基于材 料 力学理 论对新 型 的直角 平 。 行板 柔性 铰链进 行 了理 论 建 模 , 出 了铰链 的 刚度 得
计 算 表达 式 , 用有 限 元分 析 软件 对 新 型的 直 角 平 采
l e u e Ha b n I s iu  ̄ o e o o y。 r L 5 0 1, i ) l . r t r i n tt i fTe hn t g Ha b n 1 0 0 Ch na i f ̄ e
Abta t A o e - sr c : n v l2DOF n n p st nn tg rr d b Z i e e p e .n t i p p r t et e r fg n a o o ii igsa ed /e yP T sd v h o d I hs a e .h h oy o e - o i ea eh nc su e o a ay ete f u ehn eo tg ,n h t f e so ih a g hx r ig e ie . r l c a isi s dt n l s h  ̄x r ig f a e a dt si n s frg - n h f u ehn ei d rv d m s e f i i s Th u eia n lsso tt n y a cb h vo ft ehn ea h t g a re y u igt efnt l・ en m rcla y i n sai a d n mi e a iro h ig n t sa ei c rid b sn h iieee a c d d e s me t t o ( EM )a d t x ei na n lssi p ro me o me s r h d lfe u n  ̄so h tg . i r sme h d F ,n h e p rme tla ay i s ef r d t au e t emo a r q e c ft es a e e Th on itn yo h h o y, u r a n x e i n a e It r v dt eac rc ft e r d l n h a e c sse c fte t e r n mei la e p rme t I s1 sp o e h cu ayo h y mo e a t ev — c d r 1 o d l i ft eFEM n ls . i t o h d y a yi a s
压电陶瓷驱动的微位移工作台建模与控制技术研究
压电陶瓷驱动的微位移工作台建模与控制技术研究一、本文概述随着科技的快速发展,微位移技术作为精密工程领域的关键技术之一,在光学、电子、生物医学、航空航天等众多领域发挥着越来越重要的作用。
微位移工作台作为实现微位移操作的重要设备,其性能直接影响到相关领域的精密加工和测试精度。
压电陶瓷驱动的微位移工作台因具有响应速度快、位移分辨率高、控制精度高等优点,成为当前研究的热点。
本文旨在深入研究压电陶瓷驱动的微位移工作台的建模与控制技术,以提升其运动性能和稳定性。
我们将对压电陶瓷的基本特性进行分析,建立其精确的数学模型,为后续的控制算法设计提供理论基础。
在此基础上,我们将研究压电陶瓷微位移工作台的动态特性,分析影响其运动精度的主要因素,并提出相应的补偿策略。
本文将重点探讨压电陶瓷微位移工作台的控制技术。
我们将研究并比较不同控制算法在压电陶瓷驱动系统中的应用效果,如PID控制、模糊控制、神经网络控制等,以找到最适合压电陶瓷微位移工作台的控制方法。
同时,我们还将研究如何结合现代控制理论,如自适应控制、鲁棒控制等,进一步提高微位移工作台的动态性能和稳定性。
本文将通过实验验证所提出建模与控制技术的有效性。
我们将搭建压电陶瓷微位移工作台的实验平台,进行动态性能测试和控制算法验证,以评估所提出技术的实际应用效果。
通过本文的研究,我们期望能够为压电陶瓷驱动的微位移工作台的设计和应用提供有益的参考和指导。
二、压电陶瓷驱动技术基础压电陶瓷,作为一种功能陶瓷材料,具有独特的压电效应,即在受到外部机械力作用时会产生电荷,反之,当受到电场作用时则会发生形变。
这种特性使得压电陶瓷在微位移控制领域具有广泛应用。
压电陶瓷驱动器(Piezoelectric Ceramic Actuator, PCA)利用压电陶瓷的逆压电效应,通过施加电压实现陶瓷材料的微小形变,从而驱动负载产生微位移。
压电陶瓷驱动器的优点显著,包括响应速度快、位移分辨率高、驱动电压低、结构紧凑且易于集成等。
一种用于光纤F-P传感器的微纳米级微位移工作台的研究
J n. 0 6 u 2 0
种用 于光 纤 F P传 感器 的微 纳米 级 微 位 移 — 工 作 台 的研 究 一雷小华 源自 国平 陈 星 朱 永 陈伟 民
( 庆 大 学 光 电技 术 及 系统 教 育 部 重 点 实 验 室 重 庆 重 ( 庆市计 量技术研究所 重 重庆 404 ) 0 0 4 404 ) 0 0 4
移 工 作 台 的不 确定 度 为 0 1 m。 .
关键词
标定
工 作台
微 位移
光纤 F P传感 器 —
4 0 4 2 6 .0 0
中图分类号
TM9 文 献 标 识 码 A 国 家 标 准 学 科 分 类 代 码 3
S u n a N o e o kt b e o no m i r n O r r Ba e n t e t dy o v lW r a l n Na - c o de s d o h
摘要
标定光纤 F P传感器这种微纳米级位移传感器非常 困难 。 — 分析常用的微位移技术优缺点 , 这里提 出了一种基 于弹性变
形原理的工作台的设计方法。 建立 了工作 台位移变形 的数学模 型, 对其产生位移的误差进行 了理论分 析。 在此基础上 , 实际设
计 并 开 发 了 实 验 系 统 , 德 国 h i n ay 用 ed h in光栅 位 移 传 感 器对 光纤 F P传 感 器 进 行 了标 定 实 验 。 量 的 标 定 实 验 证 明 , 微 位 e — 大 该
机与机械式 位移缩小 机构驱 动的微位 移机 构、 涡轮蜗
1 引
言
杆机构 等。压 电陶瓷 驱动 的微位 移机构行程小 , 一 般为几 十微 米 , 其严重 的非线 性 、 迟滞 、 漂移现 象等使 得精度只能达到微米级 , 很难在此基础上有所提 高。 对
纳米级微动工作台的研究现状及发展趋势
基金项 目: 国家 自然科学基金项 目(0 7 186 5 5 5 ) 浙江 省自然科 学基金青年人 才项 口( 5 3 9 ) 5253 、 705 , 0 R 0 17
作者简介:雷 勇( 9 9一 ) 男 , 17 , 四川 内江人 . 硕士研究生 . 研究方 向为微运 动技术 。
综述, 对现有的 纳米级微 动工作 台的工作原理 、 性能特点和 可实现的运动 范 围及精 度进行 了分析 比较 , 此基础上 。 在 对纳米级微 动工作 台的发展趋 势做 了展 望。 关键词 : 米科技 ; 纳 磁悬浮 ;微动 工作 台 ;高精度 ;大范 围
中图分 类号 : H13 3 T 3 . 文献标识码 : A
维普资讯
第 1期
雷 勇等: 纳米级微动工作台的研究现状及发展趋势
7 3
移器 上施 加 电压时 , 由于 四连 杆受 力 而变形 , 得两个 方 向的 获 微 位移 。其优 点如 上所 述 , 可 以在单 层上 实 现 两 个 方 向的 但 微动。
最 大工作 速度 为 4 m / , 0 m :定位 精度 ± . m。 s 01
13 滑动 导轨式微动工作台 .
典 型的采用 两级 丝杆 驱 动滑 动导 轨实现 微 位移原 理 示 意
图 1 单 层 — Y弹性 微 动 上 作 台
图¨ 见图3 第一级用交流 电机驱 动的丝杆 机构可 以达 , 到 ± . T的定位精度 , 05 l l 通过二级 制动器对第 一级位置 误 差进行 补偿 , 可实现 ±lm 的定 位精度 。 n
12 滚 动导轨 式微 动二 台 . [ 作
滚动导轨也是微动工作台中一种常见 的导轨形式 , 它具 有行程大, 运动灵活 、 结构简单 、 工艺性好 、 容易实现较高的定 位精度的优点 , 2为采用滚珠导轨作 为微动工作 台的支承 图 和导 向元件, 直流伺服电机传动 、 实现了对 自动分步重复光刻 机 的微定 位控制 ¨ 。该微 动 台运 动范 围为 、 向 10 m, Y方 5m
基于ANSYS的二维微动平台的性能分析
d y n a m i c r e s p o n s e a n a l y s i s w e r e m a d e t o t h e j i g g l e p l a t f o r m.T h e r e s o n a n c e f r e q u e n c y ,v i b r a t i o n m o d e a n d s t e p r e s p o n s e w h e n t h e j
基于 A N S Y S的二维 微 动平 台的性 能分析
张艳 君
( 广州机械科学研究院有限公司,广东广州 5 1 0 7 0 0 )
摘要 :设计 了一个具有杠杆放大机械 的二 维柔性 铰链式微 动平 台 ,分析其结 构非线 性和变形 非线性 对系 统特性 的影 响。采用有 限元分析方法 ,对微动工作台进行 了静力学 、模态和动态响应 分析 ,得到微定位工作 台有效工作 的谐振 频率和
P e r f o r ma n c e An a l y s i s o f 2 D J i g g l e P l a t f o r m B a s e d o n ANS YS
Z HA NG Ya n j u n
( G u a n g z h o u Me c h a n i c a l E n g i n e e r i n g R e s e a r c h I n s t i t u t e C o . ,L t d . ,G u a n g z h o u G u a n g d o n g 5 1 0 7 0 0 ,C h i n a )
p l a t f o m r c a n me e t d e s i g n i n g r e q u i r e me n t s .
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
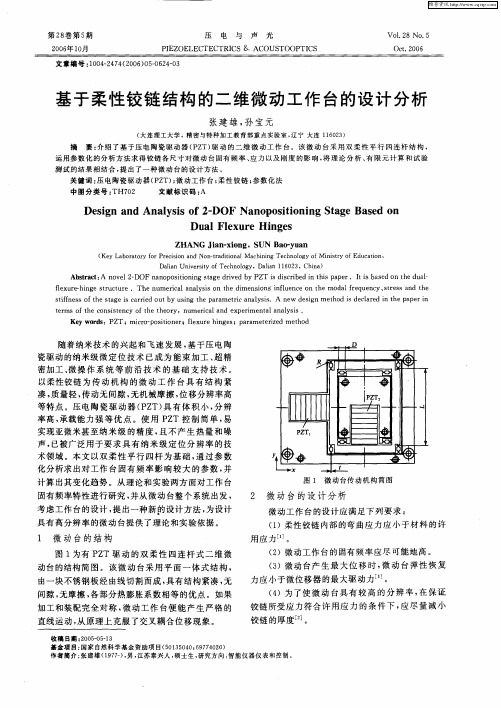
( a) x 向受力分析 ( a) F or ce analysis alo ng x axis
( b) x 向静定结构 ( b) Determinatio n st ruc tur e alo ng x ) F or ce analy sis alo ng ( a) 二维微定位工作台 ( a) 2 DOF stag e Fig. 2 y ax is 图2
21
得到基本静定体系如图 2( d) 所示, 在基本静定体 系上分 别作用 驱动力 P y / 4、 广义 未知力 X 1 和 X 2 , 方向如图 2( d) 所示。 同理 , 由力法方程分别解得广义未知力 X 1 = 1 3 Py L 和 X 2 = P y 。此时 , 二次超静定位移求 20 20 解可等效为图 2( d) 所示外荷载作用下静定体系 的位移求解问题。利用莫尔积分式 , 可导出 C 点 沿 P y 方向上的位移
I L
铰链截面惯性矩; 铰链长度。
由式 ( 1) 分别解得 广义未 知力 X 1 = 3 P x L 20 3 和X 2 = P x 。此时, 二次超静定位移求解可等 20 效为图 2( b ) 所示外荷载作用下静定体系的位移 求解问题。利用莫尔积分式, 可导 出 C 点沿 P x 方向上的位移
x
微动工作台运动部分的质量; 微动工作台 x 方向刚度 ; 微动工作台 y 向刚度; 工作台沿 x ( y ) 方向的位移; 工作台沿 x ( y ) 方向的加速度。
Design and analysis on a 2 DOF nanopositioning stage
SUN L i ning, M A L i, RONG Wei bin, GAO Yan ( Robot Resear ch I nsti tute, H ar bi n I nst it ute of T echnol ogy , H ar bin 150001 ) Abstract: A t w o deg ree of f reedom ( 2 DOF ) flexure hing e guided mot ion nano positioning st ag e w as developed t o alig n opt ical sy st em, and t he simplif ied mo deling of the nanoposit ioning st age w as dis cussed. T he x and y dir ection st iff ness and t w o natural frequencies of t he nanoposit ioning stag e w ere deduced in t erm s o f t he t heory of st ruct ural mechanics. T heoret ical analy sis and F init e Element Anal y sis( FEA) on st at ic and dynamic behav io rs of the nanoposit ioning st age w ere perf ormed, t he compar at ive result s of t he t heor y, FEA and exper im ent s show the accuracy o f t heory m odel and the validity of FEA. F EA also indicat es t hat t he st if f ness, nat ural f requency and driving f orce w ill increase wit h decreasing hinge lengt h and increasing hinge w idt h in despit e of increasing t he maxim um st ress o f the st age. T he exper im ent al result s also sho w t hat dim ensio n mo dificat ion is available to cont rolling and opt imizing nat ural f requency, displacement , st resses, and for ce t o achieve t he desired r esponse of the nanopo sit ioning sy st em. Finally, a simple procedure to o pt imize dimensions of t he nanoposit ioning st age w as given. Key words: f lex ure hing e; nanoposit ioning stag e; F init e Elem ent Analysis( F EA)
( 哈尔滨工业大学 机器人研究所 , 黑龙江 哈尔滨 150001)
摘要 : 研究开发了一种采用柔性铰链导向的二 维光学调整微定位工 作台 , 建 立了工作 台的简化模 型 , 并 利用结 构力学 理 论推导出工作台沿 x 、 y 方向刚度及前二阶固有频率解 析式。进行 了微定 位工作 台固有 频率及沿 x 、 y 方向刚 度的试 验 测试 , 并结合解析方法和有限元方法对微定位工作台设 计刚度及动力特性进行分析验证。有限元分析表明 : 当工作台 的 直角平板柔性铰链长度较小而铰链宽度较大时 , 其刚度、 频率 及驱动力较 高 , 铰 链根部应力 集中也 较严重。通 过改变 柔 性铰链的特征参数 , 可达到控制和优化工作台固有频率 、 输出位移、 应力分布及驱动力响应的目的 , 并提出 了一种优选 微 定位工作台柔性铰链参数的简易方法。 关 键 词 : 柔性铰链 ; 纳米定位工作台 ; 有限元分析 文献标识码 : A 中图分类号 : T H 703. 6
第 14 卷
第 3期
光学 精密工程
O ptics and Precisio n Eng ineer ing
2006 年 6 月 文章编号 1004 924X( 2006) 03 0406 06
Vo l. 14 N o. 3 Jun. 2006
一种纳米级二维微定位工作台的设计与分析
孙立宁, 马 立, 荣伟彬, 高 燕
y
( 5)
基本静定 体系在荷载 P x / 4 单独作用时 , C
=
2Py L 3 , 5E tb 3 5E tb 3 , 2L 3
( 6)
点沿 X i 方向上的广义位移。 采用图形互乘法得到广义位移和柔性系数分 2L L L 、12 = 21 = 、22 = 、 EI 2EI 3EI 3P x L 2 Px L 3 1P = 和 2P = 。 8E I 8EI 式中 E 工作台材料弹性模量 ; 别为
2
纳米级微定位工作台设计与分析
传统的定位系统采用电机驱动 , 经机械传动 实现精密定位, 但由于摩擦和回程间隙的存在 , 机 械传动系统难以实现光学精密调整要求。本文设 计的二自由度微定位工作台利用压电陶瓷驱动, [ 6 7] 通过直角平板柔性铰链实现微定位操作 , 微定 位工作台模型如图 1( a) 所示。
y
=
X 1+
22
X2+
2p
= 0,
( 1)
i
!
3 MM d s = P y L + EI 12EI
式中
ij
广义柔 性系数 ( 表示基本 静定体系在
X j 方向上的广义单位力单独作用时, C 点沿 X 方向上的广义位移) ;
ip
Py L 3 3Py L 3 P yL 3 = , 40EI 40 EI 30 EI 将惯性矩 I = tb 3 / 12 代入式 ( 5) 中可得
qx ( q y ) MM
3
=
!EI d s =
3
Px L 3EI
3 3
3
qx ( ∀ ∀ qy ) 有频率 f 1 、 f2
由动力学方程 ( 8) 的特征值, 可导出系统的二阶固 ( 2) f 1= 1 2 ( 3) f 2= 1 2 Kx = 1 m 2 Ky = 1 m 2 5Et b , 3 2mL 5Et b . 3 2mL
( b) 柔性铰链机构 ( b) M echanism o f flex ure hinges 图1 Fig . 1 二维微定位工作台模型 2 DO F nanopositioning stag e
当压电陶瓷施加一定的电压时, 压电陶瓷伸 长并驱动柔性铰链变形, 使得工作台发生微动, 因 此工作台的位移分辨率主要取决于压电陶瓷电源 和位移传感器闭环控制的分辨率。本工作台系统 采用的压电陶瓷驱动电源位移分辨率为 5 nm, 位 移传感器闭环检测电路精度为 2 nm, 可实现微定 位分辨率为 5 nm 。 2. 1 微定位工作台的静态分析 微定位工作台直角平板柔性铰链机构模型可 简化为图 1( b) 形式, 工作台中部尺寸远大于铰链
11 2 3
则微定位工作台的 y 方向刚度 K y= 2. 2 ( 7)
=
微定位工作台的动态分析
微定位工 作台采用直角 弹性平板作 为移动 副, 应用弹性变形原理, 实现无摩擦、 无间隙的微 运动传递。整个微定位系统可简化成具有两个输 出位移, 一个质点的弹簧 - 质点系统, 那么系统的 动力学方程为 m 0 式中 m Kx Ky 0 m qx ∀ qy ∀ + Kx 0 0 Ky qx qy = 0 , ( 8)
( b) y 向静定结构 ( d) Deter minatio n str uc tur e a long y axis
柔性铰链简化模型
Simplified model of flexure hing es
408
光学