足球机器人视觉系统的设计与实现
机器人视觉检测系统设计
机器人视觉检测系统设计随着人工智能和机器人技术的不断发展,机器人的应用范围越来越广泛。
在工业生产中,机器人已经成为不可或缺的一部分。
不过,机器人的工作效率和准确度,很大程度上取决于其视觉检测系统的设计。
因此,在本文中,我们将探讨机器人视觉检测系统的设计。
一、机器人视觉检测系统的基础原理机器人视觉检测系统是机器人控制技术中的一个重要组成部分,其基本原理就是利用摄像头或激光雷达等设备来获取环境信息,然后通过图像处理和算法分析,得出所需的信息并指导机器人的行动。
因此,机器人视觉检测系统的设计需要掌握图像处理和算法分析的相关知识。
其中,图像处理是指对图像进行识别、分割、压缩、恢复等处理过程;算法分析则是指利用数学模型对图像信息进行分析和计算。
二、机器人视觉检测系统的设计流程机器人视觉检测系统的设计流程十分复杂,需要团队合作完成。
一般可分为以下几个阶段:1. 需求分析:根据机器人应用场景,确定机器人需要检测的对象和数据,以及检测结果的有效性和准确性要求。
2. 设备选择:根据需求分析的结果,选择适合的硬件设备,包括摄像头、激光雷达、计算机、图像处理芯片等。
3. 数据采集:使用设备采集所需的数据,并进行预处理和筛选,以确保数据的准确性和可靠性。
4. 图像处理:对采集的图像进行处理和分析,提取需要的信息,并进行分类、识别和判定。
5. 算法设计:根据图像处理的结果和检测要求,设计合适的算法,对数据进行分析和计算。
6. 系统集成:将设备与算法集成,实现机器人的视觉检测功能,优化机器人的运作效率和准确性。
三、机器人视觉检测系统设计的挑战机器人视觉检测系统设计的挑战主要包括以下三个方面:1. 环境复杂性:机器人视觉检测系统需要应对不同环境下的检测需求,如光线、温度、湿度等变化,这对系统的设计和调试提出了挑战。
2. 数据精度:机器人视觉检测系统需要处理大量数据,并保证数据的准确性和有效性,特别是在噪声干扰较大的环境下,对算法的设计和优化提出了更高要求。
机器人视觉系统设计研究

机器人视觉系统设计研究现代工业生产中,机器人被广泛应用,而机器人视觉系统是机器人重要的先决条件之一。
机器人视觉系统是基于视觉处理技术,使机器人能够感知周围环境,从而实现自主控制和自主行为。
机器人视觉系统的设计要求它具备目标识别、抓取、跟踪、导航等多种功能,以满足不同场合下的需求。
机器人视觉系统的设计研究从最初的2D视觉系统,到3D视觉系统和深度学习,经历了长期的演变和发展。
2D视觉系统是机器人视觉系统的基础。
2D视觉系统以摄像头为基础,通过对图像的处理和分析,完成对目标的识别和跟踪。
但2D视觉系统所获得的图像是平面的,不能表达物体的深度信息,因此在工业生产中应用受到了一定的限制。
3D视觉系统则是对2D视觉系统的升级,它使用多个摄像头从不同的角度拍摄目标,并通过视差和光线的反射来计算出物体的深度信息。
由于3D视觉系统能够记录物体在3D空间中的位置和形状,因此能够更准确地识别和跟踪目标,并能够实现更高的抓取精度。
但是,3D视觉系统的成本较高,且需要更高的计算能力来处理和分析数据,这一点限制了其在工业生产中的应用。
随着深度学习技术的发展,深度学习技术被应用于机器人视觉系统中。
深度学习技术通过对大量的数据进行学习和训练,能够获得更高的识别准确度和更高的运算速度,从而提高机器人视觉系统的性能。
同时,深度学习技术还可以实现机器人对多种物体的分类和识别,因此深度学习技术是未来机器人视觉系统发展的重要方向。
除了技术的升级和发展,机器人视觉系统的设计也需要考虑机器人的应用场景和环境。
例如,在危险的工业场景中,机器人视觉系统需要具有高强度和高耐受性,以应对环境的复杂性和威胁性。
在较为平稳的环境中,机器人视觉系统需要更加精细的设计和控制,以保证稳定性和安全性。
为了实现机器人视觉系统的设计和优化,需要跨学科合作。
机器人视觉技术涉及到计算机视觉、机器学习、控制系统、电子技术等多个领域的知识。
因此,跨学科的合作和交流成为了机器人视觉系统设计和研究的重要手段。
足球机器人视觉系统的光照适应性设计

0 引 言
足球机器人视觉系统作 为机 器人 系统 的重要组 成部 分 , 它的主要任务是实时采集 图像并 根据 图像 信息感知球场 中各 类 目标的空间信息 , 结果 提供给决策系统 。因此 , 将 视觉系统 要满足实时性 、 准确性 、 适应性 的性能要求 。 视觉系统 中最重要 的任务是 对 图像进行 分割 , 一般 采用 基于颜色特征进行 图像 分割 。对 于这 样 的视 觉系统 , 高其 提 光照适应性就是提高视觉系统在不稳 定光照条件下识别 目标 颜色 的正确率 。针对这个 问题 , 国内外先后 提 出了很多 解决
颜色空 间应选取受光 照影 响较小的颜色模 型。足球 机器 人系统常用 的颜色模 型有 R B、 V和 H I 种。本文 采用 G YU S三 Y V颜色模型 , U 主要原 因有 三方 面 : ) G 1 R B模 型的三 个颜 色 分量具有高相关性 , 每个分量 中都带有 亮度信息 , 且 当光 照发 生 变化时最不稳定 , 影 响 目标 识 别 ; ) 易 2 摄像 头摄 人 的 图像 多 以 R B和 Y V格式输 出 , G U 采用 HS 模型 在进 行 图像处 理 I 时, 需要 将 R B图像 转换 为 H I 色 空间 的图像 , 换涉 及 G S颜 转
足 球 机 器 人 视 觉 系统 的光 照适 应 性 设计
李 琛 , 孙 焘 冯 , 林
(. 1 大连理 工 大学 大 学生创 新 院 , 宁 大连 162 ; 2 海 军 94 9部 队 , 宁 大连 16 4 ) 辽 103 . 13 辽 10 1
(cO O @2 c .o ) 1 8 9 1n cm h
摘
要: 为提 高 R b C p小型足 球机 器人 视 觉 系统在 不稳 定光 照条 件 下 识 别 目标 的 正 确 率 , oo u 提
RoboCup 机器人足球仿真比赛开发设计
RoboCup机器人足球仿真比赛开发设计* 郭叶军熊蓉吴铁军(浙江大学控制科学与工程学系工业控制技术国家重点实验室杭州 310027)E-mail: yjguo@摘要:机器人世界杯足球锦标赛(The Robot World Cup),简称RoboCup,通过提供一个标准任务来促进分布式人工智能、智能机器人技术及其相关领域的研究与发展。
本文在介绍RoboCup仿真环境的基础上,系统完整地介绍了客户端程序的开发设计流程,阐述了其中涉及到的一些主要问题和算法,最后简要综述目前国际上的典型高层算法结构。
关键词: RoboCup 机器人足球比赛多智能体系统随着计算机技术的发展,分布式人工智能中多智能体系统(MAS:Multi-agent System)的理论及应用研究已经成为人工智能研究的热点。
RoboCup1则是人工智能和机器人技术的一个集中体现,被认为是继深蓝战胜人类国际象棋冠军卡斯帕洛夫后的又一里程碑式挑战,目标是到2050年完全类人的机器人足球队能够战胜当时的人类足球冠军队伍。
RoboCup包括多种比赛方式,主要分为软件仿真比赛和实物系列的机器人足球比赛。
由于软件仿真比赛无需考虑实际的硬件复杂性,避免硬件实现的不足,可以集中于研究多智能体合作与对抗问题,因此,目前参加仿真组比赛的队伍数目最多。
本文的内容涉及RoboCup仿真比赛,系统地介绍了client程序开发设计完整流程,可以作为是开发完整的RoboCup仿真程序的入门指南。
1.RoboCup仿真比赛介绍2 RoboCup仿真比赛提供了一个完全分布式控制、实时异步多智能体的环境,通过这个平台,测试各种理论、算法和Agent体系结构,在实时异步、有噪声的对抗环境下,研究多智能体间的合作和对抗问题。
仿真比赛在一个标准的计算机环境内进行,采用Client/Server 方式,由RoboCup联合会提供Server系统rcsoccersim(版本8之前名为soccerserver),参赛队编写各自的客户端程序,模拟实际足球队员进行比赛。
双足机器人系统平衡控制设计论文

目录摘要 (Ⅰ)Abstract.................................................................................................. (Ⅱ)1 绪论 (3)1.1课题的研究背景和意义 (3)1.2双足机器人的国内外研究状况 (4)1.2.1国外研究状况 (4)1.2.2国内研究状况 (8)1.2.3 欠驱动双足机器人 (9)1.3欠驱动双足机器人控制存在的问题 (11)1.4本文的研究工作 (12)1.5论文的构成 (12)2 双足机器人直立平衡控制的模型研究 (13)2.1.双足机器人的欠驱动姿态 (13)2.1.1 模型简化的提出 (13)2.1.2双足机器人欠驱动姿态分析 (13)2.2物理模型 (15)2.3数学模型 (16)2.4 Matlab仿真模型 (18)2.5小结 (18)3双足机器人系统的能控能观性分析 (19)3.1 平衡稳定控制目标分析 (19)3.2 能控制性与能观测性分析 (19)3.3小结 (20)4 平衡控制策略 (21)4.1 LQR控制器简介 (21)4.2线性二次型调节器(LQR)基本原理 (21)4.3 平衡控制的仿真实现 (22)4.4 小结 (23)5仿真实验 (24)5.1控制器仿真模型 (24)5.2仿真的结果曲线 (25)5.3小结 (27)6结论与展望 (28)致谢 (28)参考文献 (29)附录 (32)附录Ⅰ(数学模型推导): (32)附录Ⅱ(仿真模型): (35)附录Ⅲ(Matlab程序语言): (36)1 绪论1.1 课题的研究背景和意义随着机器人技术的发展和控制理论的逐步成熟,对双足机器人的稳定性问题、双足机器人步行移动及各种仿人动作的研究正受到国际学者们越来越多的普遍关注。
基于控制理论、动力学原理及仿生学原理,人们通过对动物和人类的运动行为、控制技巧的研究,提出和发展了一系列复杂运动控制模态及相关算法。
基于DSP的足球机器人设计
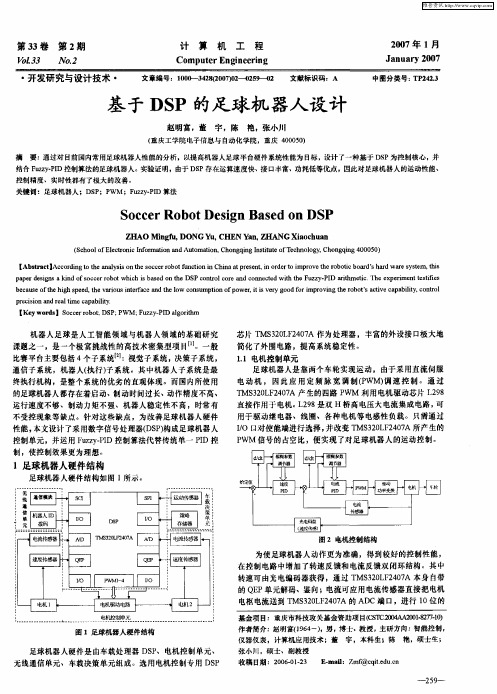
电动 机 , 因此 应 用 定频 脉 宽 调 制(WM) 速 控 制 。通 过 P 调 T 30 F 4 7 产 生的四路 P MS 2 L 2 0 A WM 利 用电机驱动芯片 L 9 28 直接作 用于 电机 。 2 8是双 H桥高 电压大电流集成 电路 , L9 可 用于驱 动继 电 、线 圈、各 种电机 等 电感性负 载。只需通过 器 I 口对使能端进行选择 , 改变 T 3 0 F 4 7 / O 并 MS 2 L 2 0 A所产 生的 P WM 信号的 占空 比,便实现 了对 足球机器人 的运动控制 。
结合 FzyPD控制算法 的足球机 器人 。 uz-I 实验证 明,由于 D P存在运算速度快 、 口丰 富、 S 接 功耗低等优 点 , 因此对足球机器 人的运动性能 、 控制精度、实时性都有 了极大 的改善 。 关键词 :足球机器人 ;D P WM ;FzyPD算法 S ;P uz-I
S c e b t sg s d 0 P o c rRo o De in Ba e n DS
ZIAO i gu D ONG CIEN n t M n f, Yu, - I Ya , ANG a c u n Xio h a
( c o l f l to i If r t n a dAuo t n Ch n qn si t f e h oo y C o g i g4 0 5 ) S h o o E e r nc n o ma o n t mai , o g ig I t ueo T c n lg , h n qn 0 0 0 c i o n t
p p rd sg sak n fs c e o o c sb s do eDS o to o ea o ne e t eF z y P D r h tc Th x ei n etfe a e e in i do o c rr b twhih i a e nt Pc nr lc r ndc n c dwi t u z - I ai mei ee p rme t siis h t h h t t
足球机器人的目标识别和定位ppt课件-17页PPT资料

五.有奖问答
3.当机器视觉系统发现目标以后,为什么要 采用红外和声纳测距方法进行定位?
答:红外和声纳测距的方法可以互补,有些 不能反射红外光线的物体,可以很好的反 射超声波;反之,对于纤维物等超声波无 法检测的物体,红外测距传感器却很容易 检测到。
五.有奖问答
4.设定颜色阀值的作用是什么?
答:将比赛目标从背景中分离出来
The end
Thank you !
更多精品资源请访问
docin/sanshengshiyuan doc88/sanshenglu
四.足球机器人的目标定位
目
声纳测距
标
定
位
PSD测距
4.1目标定位之PSD测距 D=bf/x
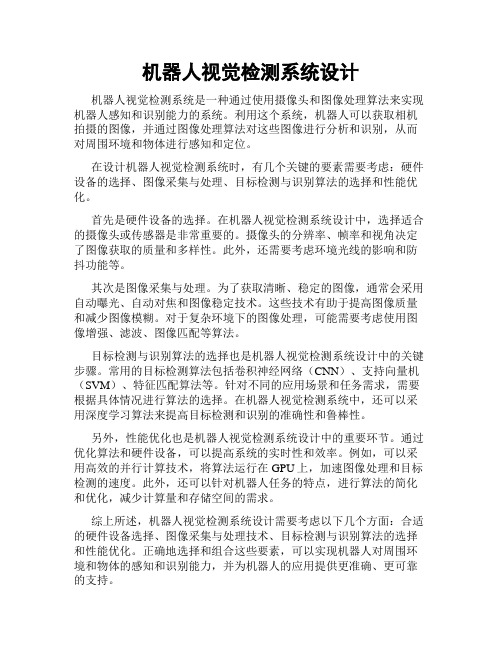
四.足球机器人比赛流程
摄像头捕获图像 图像采集卡AD转换
颜色空间变换 设置颜色阈值
图像分割 识别比赛足球
目标定位 计算方向和距离
调整机器人姿态 接近目标并护住足球
确定球门位置 面向球门
避开障碍
有障碍否
Y
N N
机器人视觉技术之
足球机器人的目标识别和定位
小组成员:朱蓓 张若宇 庸常 报告人:朱蓓
2019年10月12日
主要内容
●足球机器人叱咤球场 ●足球机器人的主体结构 ●足球机器人的目标识别方法 ●足球机器人的定位方法 ●足球机器人比赛流程
一.足球机器人叱咤球场
二.AS-R智能机器人的结构
视频采集模块
朝球门带球前进
进入射程否
Y
射门
五.有奖问答
1.R、G、B值分别表示一个像素分解在红、 绿、蓝三原色上的( )
A.亮度 B.色调 C.饱和度 D.比例
答案 A
机器人视觉检测系统设计
机器人视觉检测系统设计机器人视觉检测系统是一种通过使用摄像头和图像处理算法来实现机器人感知和识别能力的系统。
利用这个系统,机器人可以获取相机拍摄的图像,并通过图像处理算法对这些图像进行分析和识别,从而对周围环境和物体进行感知和定位。
在设计机器人视觉检测系统时,有几个关键的要素需要考虑:硬件设备的选择、图像采集与处理、目标检测与识别算法的选择和性能优化。
首先是硬件设备的选择。
在机器人视觉检测系统设计中,选择适合的摄像头或传感器是非常重要的。
摄像头的分辨率、帧率和视角决定了图像获取的质量和多样性。
此外,还需要考虑环境光线的影响和防抖功能等。
其次是图像采集与处理。
为了获取清晰、稳定的图像,通常会采用自动曝光、自动对焦和图像稳定技术。
这些技术有助于提高图像质量和减少图像模糊。
对于复杂环境下的图像处理,可能需要考虑使用图像增强、滤波、图像匹配等算法。
目标检测与识别算法的选择也是机器人视觉检测系统设计中的关键步骤。
常用的目标检测算法包括卷积神经网络(CNN)、支持向量机(SVM)、特征匹配算法等。
针对不同的应用场景和任务需求,需要根据具体情况进行算法的选择。
在机器人视觉检测系统中,还可以采用深度学习算法来提高目标检测和识别的准确性和鲁棒性。
另外,性能优化也是机器人视觉检测系统设计中的重要环节。
通过优化算法和硬件设备,可以提高系统的实时性和效率。
例如,可以采用高效的并行计算技术,将算法运行在GPU上,加速图像处理和目标检测的速度。
此外,还可以针对机器人任务的特点,进行算法的简化和优化,减少计算量和存储空间的需求。
综上所述,机器人视觉检测系统设计需要考虑以下几个方面:合适的硬件设备选择、图像采集与处理技术、目标检测与识别算法的选择和性能优化。
正确地选择和组合这些要素,可以实现机器人对周围环境和物体的感知和识别能力,并为机器人的应用提供更准确、更可靠的支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
生长矩形生长结果
补偿法计算角度示意图
ID搜索方法示意图
静态坐标测试
动态坐标测试
角度测试
感谢徐雪松老师的指导! 感谢参加答辩的老师同学们!
机器视觉
——MiroSot(3:3)足球机器人视觉系统的
设计与实现
指导老师:徐雪松 邱海金
2010年6月8日
FIRA MiroSot(3:3)系统总图
系统实际构造图
视觉系统的硬件构成
SDC-410摄相头
图像采集卡
通过Microsoft Visual C++ 6.0构建的 FIRA3VS3Control 1.0 平台
RGB空 间距离法 的颜色颜 色选择, 公式推导
RGB空间距离法的颜色颜色选择---利 用MATLAB编程得出颜色选择取结果
0 255 0 255 255 0 255 0 0
255 0 255 0 0 255 0 255 255
近几年国内外比赛常用色标
长方形圆角队标 圆形ID
图像混色对比
Байду номын сангаас像增强
视 觉 系 统 的 软 件 构 成
视觉系统的工作的目的
各个机器人及足球的坐标信息 各个机器人的朝向角 根据坐标及朝向角计算其它参数
视觉系统的工作的要求
实时 稳定 准确
视觉系统的工作流程
CCD摄取赛场 图像信息
对图像进行预 处理
图像分割 目标检测
目标识别,比 赛信息提取
赛场信息输出
本文的主要工作
1、选取色标颜色 2、设计新的色标形状,队员编码 3、图像的预处理 4、图像的二值化 5、目标搜索算法
RGB彩色空间的表示
R:红色分量 G:绿色分量 B:蓝色分量
HSI彩色空间表示
色调H—颜色的分类 色饱和度S—表示色的纯度 强度 I —彩色光颜色的强弱程度即光强
RGB空间距离法的颜色颜色选择
RGB空间
HSI空间
增强后图像
色饱和度 S=1
RGB空间
图像增强对比
RGB空间距离法示意图
所有目标色块 分割情况
红色小球分割 情况
黄色队标分割 情况
蓝色队标分割 情况
绿色ID分割情 况
天蓝色ID分割 情况
紫色ID分割情 况
色标搜索算法
种子填充 生长矩形 ID的搜索
全场网格搜索种子点