K-H-V行星齿轮减速器 瞿鸿鹏
3K型行星齿轮传动的啮合效率分析

3K型行星齿轮传动的啮合效率分析支余吉;赵光辉;刘杰;王晓鹏;翟聪【摘要】用单元分析的方法对3K型行星轮系的传动比和啮合效率进行推导,并讨论影响3K型行星轮系啮合效率的因素,以作为3K型行星齿轮传动分析与设计的依据.【期刊名称】《现代制造技术与装备》【年(卷),期】2017(000)008【总页数】3页(P93-94,105)【关键词】3K型行星轮系;传动比;啮合效率【作者】支余吉;赵光辉;刘杰;王晓鹏;翟聪【作者单位】郑州机械研究所,郑州450000;郑州机械研究所,郑州450000;郑州机械研究所,郑州450000;郑州机械研究所,郑州450000;郑州机械研究所,郑州450000【正文语种】中文行星齿轮传动具有体积小、承载能力高、传动比大、传动效率高等特点,现已广泛应用于航空发动机、起重运输、石油化工和武器装备的齿轮传动装置中。
3K型行星轮系是行星齿轮传动中的一种常见类型,其传动比范围较大,但传动效率较低。
本文将对3K轮系的传动比和啮合效率进行研究,以作为3K型轮系分析与设计的依据。
3K型行星齿轮传动由3个太阳轮(包括内齿圈)和1个行星架组成。
图1是目前较新型的一种3K行星轮系,结构特点是3个中心轮a、b和e同时与行星轮c相啮合。
可见,它的结构更为紧凑,安装较为方便。
目前,该结构在我国的齿轮传动中已获得日益广泛的应用。
1.1 3K型轮系传动比对于2K-H行星齿轮传动,若分别将第一个太阳轮用i表示,第二个太阳轮用j表示,行星架用k表示,则其转化机构传动比与各构件之间的关系式如下:由于3K型传动可以视作2个2K-H型传动单元串联而成,所以它们之间的耦合关系可以用图2表示。
从图2可以看出,a-b-c和a-e-c分别构成两个2K-H轮系单元。
根据式(1)可以求出两个轮系单元中的等值关系式为:当a轮输入、e轮输出、b轮固定(ωb=0)时,联立式(2)、式(3),消去ωc可以求出3K型轮系传动比:从式(4)可以看出,当选取的值接近1时,3K型轮系的传动比将趋于无穷大。
行星齿轮机构传动比计算方法
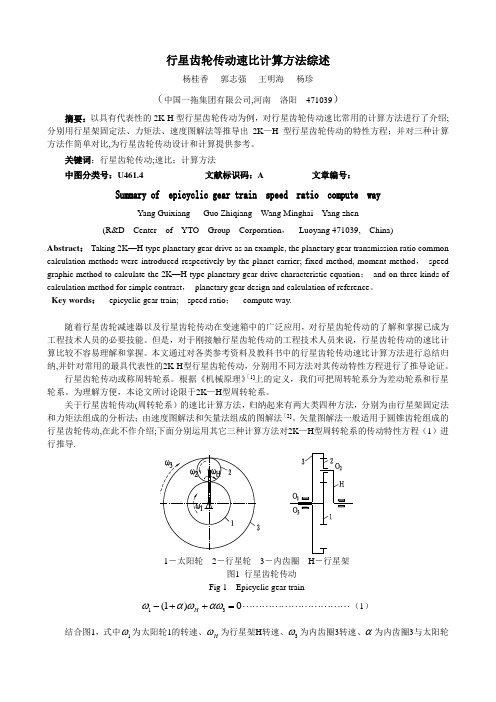
行星齿轮传动速比计算方法综述杨桂香 郭志强 王明海 杨珍(中国一拖集团有限公司,河南 洛阳 471039)摘要:以具有代表性的2K-H 型行星齿轮传动为例,对行星齿轮传动速比常用的计算方法进行了介绍;分别用行星架固定法、力矩法、速度图解法等推导出2K —H 型行星齿轮传动的特性方程;并对三种计算方法作简单对比,为行星齿轮传动设计和计算提供参考。
关键词:行星齿轮传动;速比;计算方法中图分类号:U461.4 文献标识码:A 文章编号:Summary of epicyclic gear train speed ratio compute wayYang Guixiang Guo Zhiqiang Wang Minghai Yang zhen(R&D Center of YTO Group Corporation , Luoyang 471039, China)Abstract : Taking 2K —H type planetary gear drive as an example, the planetary gear transmission ratio common calculation methods were introduced respectively by the planet carrier; fixed method, moment method , speed graphic method to calculate the 2K —H type planetary gear drive characteristic equation ; and on three kinds of calculation method for simple contrast , planetary gear design and calculation of reference 。
Key words : epicyclic gear train; speed ratio ; compute way.随着行星齿轮减速器以及行星齿轮传动在变速箱中的广泛应用,对行星齿轮传动的了解和掌握已成为工程技术人员的必要技能。
变速器齿轮设计

变速器齿轮设计8.4 变速箱齿轮设计⽅法8.4.1 变速箱齿轮的设计准则:由于汽车变速箱各档齿轮的⼯作情况是不相同的,所以按齿轮受⼒、转速、噪声要求等情况,应该将它们分为⾼档⼯作区和低档⼯作区两⼤类。
齿轮的变位系数、压⼒⾓、螺旋⾓、模数和齿顶⾼系数等都应该按这两个⼯作区进⾏不同的选择。
⾼档⼯作区:通常是指三、四、五档齿轮,它们在这个区内的⼯作特点是⾏车利⽤率较⾼,因为它们是汽车的经济性档位。
在⾼档⼯作区内的齿轮转速都⽐较⾼,因此容易产⽣较⼤的噪声,特别是增速传动,但是它们的受⼒却很⼩,强度应⼒值都⽐较低,所以强度裕量较⼤,即使削弱⼀些⼩齿轮的强度,齿轮匹配寿命也在适⽤的范围内。
因此,在⾼档⼯作区内齿轮的主要设计要求是降低噪声和保证其传动平稳,⽽强度只是第⼆位的因素。
低档⼯作区:通常是指⼀、⼆、倒档齿轮,它们在这个区内的⼯作特点是⾏车利⽤率低,⼯作时间短,⽽且它们的转速⽐较低,因此由于转速⽽产⽣的噪声⽐较⼩。
但是它们所传递的⼒矩却⽐较⼤,轮齿的应⼒值⽐较⾼。
所以低档区齿轮的主要设计要求是提⾼强度,⽽降低噪声却是次要的。
在⾼档⼯作区,通过选⽤较⼩的模数、较⼩的压⼒⾓、较⼤的螺旋⾓、较⼩的正⾓度变位系数和较⼤的齿顶⾼系数。
通过控制滑动⽐的噪声指标和控制摩擦⼒的噪声指标以及合理选⽤总重合度系数、合理分配端⾯重合度和轴向重合度,以满⾜现代变速箱的设计要求,达到降低噪声、传动平稳的最佳效果。
⽽在低档⼯作区,通过选⽤较⼤的模数、较⼤的压⼒⾓、较⼩的螺旋⾓、较⼤的正⾓度变位系数和较⼩的齿顶⾼系数,来增⼤低档齿轮的弯曲强度,以满⾜汽车变速箱低档齿轮的低速⼤扭矩的强度要求。
以下将具体阐述怎样合理选择这些设计参数。
8.4.2 变速箱各档齿轮基本参数的选择:1 合理选⽤模数:模数是齿轮的⼀个重要基本参数,模数越⼤,齿厚也就越⼤,齿轮的弯曲强度也越⼤,它的承载能⼒也就越⼤。
反之模数越⼩,齿厚就会变薄,齿轮的弯曲强度也就越⼩。
行星减速机行星齿轮优化设计不均布研究
行星减速机行星齿轮优化设计不均布研究
石国国1,2,吕 昌1,2,程大海1,2
(1. 江苏徐工工程机械研究院有限公司,江苏 徐州 221004; 2. 江苏汇智高端工程机械创新中心有限公司,江苏 徐州 221004)
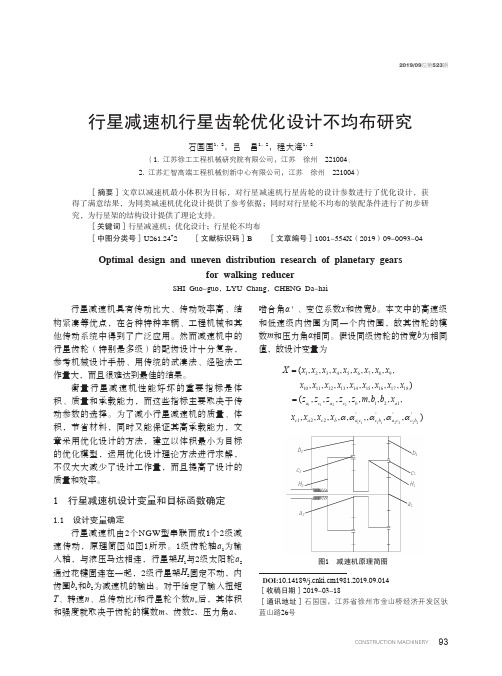
[摘要]文章以减速机最小体积为目标,对行星减速机行星齿轮的设计参数进行了优化设计,获 得了满意结果,为同类减速机优化设计提供了参考依据;同时对行星轮不均布的装配条件进行了初步研 究,为行星架的结构设计提供了理论支持。
xc1 ,
xa 2
,
xc2
,
xb
,
, ' a1c1
,
, ' c1b1
, ' a2c2
, ' c2b2
)
V m2 b42
za1 2ha* 2xa1 2 b1
za2 2ha* 2xa2
2
b2
b1
zcc1 2 2ha* 2xc1
2 b1
zc2
2ha*
2
xc
2
c
2
1
b2
H2
H1
zb 2ha* 2c* 2xb 2 b1 b2 zb 2ha* 2xb 2 b1 b2
a1
V x a 2
x2 6 4
x1 2x9 22 x2 2x10 22 2x5 5 4x13 x7
x3
图1
2x11
减速机原理简图
2 2 x4 2x12
22
[关键词]行星减速机;优化设计;行星轮不均布 [中图分类号]U261.24+2 [文献标识码]B [文章编号]1001-554X(2019)09-0093-04
Optimal design and uneven distribution research of planetary gears for walking reducer
NGW型行星齿轮减速器

NGW型行星齿轮减速器型式与尺寸(JB1799-76)详细介绍:发布时间:2007-6-26 11:39:23该标准包括单级、两级和三级三个系列的NGW型渐开线直齿圆柱齿轮行星减速器。
主要用于冶金、矿山等机械设备。
其适用条件如下:高速轴最高转数不超过1500r/min。
齿轮圆周速度不超过10m/s;工作环境温度为-40℃到+45℃;1型式与尺寸(1)单级减速器及组成两级和三级减速器的各级行星齿轮传动机械示意图如下:(2)型号与标记减速器的型号,包括减速器的系列代号、机座号、传动级数。
系列代号:NGW如图所示,这种减速器的特点是内啮合和外啮合之间公用着行星齿轮,故取“内、公、外”三字的汉语拼意字头组成“NGW”代表系列代号。
规格;机座号、传动级数及传动比代号用顺序数字表示之。
(3)型式与尺寸见表Ⅱ-44、表Ⅱ-45、表Ⅱ-46。
表Ⅱ-44单级减速器型式、尺寸表1机座号型号规格公称传动比i0外形及中心高轴伸地脚尺寸质量kg L B H H0R d Dl1l2t1b1t2b2L1L2L3LB1d1h1 NGW112.8-4.553282951250-0.5125355558538.515516215165251522M1620535-12.54773533857502 NGW212.8-4.564 353251400-0.5144671543.512 65.5182451853115.5235M225805-12.5535355538.516.5733 NGW312.8-4.5632 353651600-0.516457715491476202623125 27M225105-12.55694743.51262984 NGW412.8-4.573438425.51800-0.5185885 15551687242923315632M2430147 5-12.5634457514721285 NGW512.8-4.5845 42463.52000-0.5255985115616972431253196.536M24352135-12.572958555168.51936 NGW612.8-4.5886 4755242250-0.52256115 12565.518182836293522.545M3402895-12.5731558561667.52647 NGW72.8-4.59335355742500-0.525651115147.518119323753535213465M34035915-12.5 861565.51883018 NGW812.8-4.5142596342800-0.5287512115 1681212932443545219 51M36454495-12.589965157.518863999 NGW912.8-4.51141667213150-0.53158513125 1659224143647538545225.557M36456045-12.5976751158127.55421 0 NGW112.8-4.5126174583550-0.53559515140 21328161405254255251 645M4250815-12.5173851259224787321 1 NGW1112.8-4.51355848914000-0.5415 17160 2113281814058485263 74M425510605-12.511459514132873991 2 NGW1212.8-4.515951134500-0.545511519162412432 22456856628882M486016385-12.51281516113287314756表Ⅱ-45两级减速器型式、尺寸机座号型号规格公称传动比i0外形及中心高轴伸地脚尺寸质量/kg L B H H0R d Dl1l2t1b1t2b2L1L2L3LB1d1h4 NGW4214-22.568738425.51800-0.51835855 1528.518724292337232M243012825-160687355338 1305 NGW5214-22.5767 42463.52000-0.5249711543.5129724312538.536M243524425-160752355538.512416 NGW6214-22.585.54755242250-0.522545171254914182836293567.545M340291 25-18474127960 05.5 0 0 3.527 NGW7214-22.5895355742500-0.52550 1185 145516 1193237535358465M34035025-16087545749143508 NGW8214-22.5976.5596342800-0.52855128516616129324435458651M364548825-160976.558555164609 NGW9214-22.514667213150-0.531561315 16565.5181436475385457.557M364560725-16012558561657710 NGW1214-22.5114474583550-0.5355651515 27.51816140525425578645M425089525-160114461565.51889511 NGW11214-22.51222848914000-0.547517115 281218140584857374M425511225-160121265157.518107512 NGW12214-22.51385951134500-0.54558519125 2492242245685667382M4860173325-1601375751158121539表Ⅱ-46三级减速器型式、尺寸外形及中心高轴伸地脚尺寸质量/kgL B H H0R d D l1l2t1b1t2b2L1L2L3</,DIV>L0B197 3. 5 5355742500-0.5253011551433 81193237530535 8046510 71 596342800-0.5283512551638.51012932443545 865111 37 .5 667213150-0.531540137016543.51214364753854570.557127480353545 1570 2049 14 1640 524250 78 64W1 03 63 5 0 50-0.55 0 0 1 5 5 5 2 211 NGW1131359.5848914000-0.5405017852055 1618140584850 7374M4255116312 NGW12315049510134500-0.54555519852460 1620245685660 7382M48601756NGW型行星齿轮减速器基本参数(一)(JB1799-76)详细介绍:发布时间:2007-6-26 11:53:022.基本参数(1)公称中心距a及公称传动比i0。
三阶非圆行星齿轮机构节曲线计算分析

pt h c r eo 4 t p o —ic lrp a e ayg a c a im t aib ec n e itn ewa ov da da ic u v f —y en n. r ua ln tr e rme h ns wihv ra l e trdsa c ss le n 3— c
we egv n i h o ce e On t eb s ft e r t a n l ssa d b sn s d t et o fM alb,t e r ie n t ec n r t. h a i o h o e i l ay i n y u ig u e h o lo ta s c a h
关键词 :非 圆齿轮 ;节曲线;Mal tb a
中 图分 类 号 : TH1 2 44 3 . 2 文献标识码 : A
Ca c l to nd a l ss o ic u v ft i d o d r n n- i c a l u a i n a na y i f p t h c r e o h r - r e o c r ul r
三
阶非圆行星齿轮机构节 曲线计算分析
胡赤兵 ,王亚洲 , 黄 洋 , 刘永平
( 兰州理工大学 机 电工程学院 , 甘肃 兰州 7 0 5 ) 3 0 0
摘要 :介绍非 圆行星齿轮机构 的原理和组成 , 建立 以变 中心 距 N p N 4型非 圆行 星轮 系液压马达作 为对象 的分 — 3
星轮 齿 圈
阳轮
任意给定的传动要求 , 提出了一种基 于补偿思 的构建封闭非圆齿轮的方法. 谭伟 民等[根据推导 4 ]
的滚切 加工 非 圆齿 轮 最 简 数 学模 型 , 用 计 算 机 图 利 形 仿真方 法 , 获得 了椭 圆齿轮 的节 曲线 . 但是 对于 三 阶非 圆行 星齿 轮机 构 节 曲线 的研 究 文 献并 不 多. 对 此 , 文 以变 中心距 N- ̄ 3 非 圆行 星 轮 系 ( 本 C N 4型 见 图 1 液压 马达 作 为研 究 对 象[ , ) _ 根据 节 曲线 应 满 足 5 ] 的条 件 , 出了三 阶非 圆行 星齿 轮 机 构 的非 圆齿 轮 给
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业论文(设计)题目 k-h-v行星齿轮减速器(结构设计)系部机械工程系专业机械设计与制造及其自动化年级2008级学生姓名瞿鸿鹏学号 ********* 指导教师牟柳晨K-H-V行星齿轮变速箱的结构设计机械设计与制造及其自动化学生:瞿鸿鹏指导老师:牟柳晨【摘要】本文是关于K-H-V行星齿轮变速箱的结构设计。
这种结构只有一个太阳轮K、一个行星架H、和一个输出轴V组成。
与普通的齿轮相比较其具有承载能力大、体积小、效率高、重量轻、传动比大、噪声小、可靠性高、寿命长、便于维修等优点。
论文首先通过对行星齿轮及K-H-V行星齿轮的基本特点、工作原理进行了介绍。
然后根据国内外发展状况分析分析了该齿轮的结构的优缺点。
在设计过程中对内啮合传动所产生的各种干涉进行了详细的分析和验算以提高传动效率、精度以及提高其使用寿命为出发点,来选择减速器齿轮的模数等参数选择,进行齿轮设计计算,从而设计最终设计出合理的减速器结构。
【关键词】:行星齿轮设计 K-H-V 减速器ABSTRACT【Abstract】This thesis is about the structural design of the K-H-V planetary gearbox. The structure is made of a sun gear k, a planet carrier H, and an output shaft V. Compared with the ordinary gear, it has a larger carrying capacity, a smaller size, higher efficiency, lighter weight, larger transmission ratio, lower noise, higher reliability, longer life, easier maintenance, etc…Firstly, this paper introduces the basic characteristics and working principle of the planetary gear and the K-H-V planetary gear. Then it analyzes the advantages and disadvantages of the structure of the gear according to the domestic and international development. During the design process, all kinds of the generated interference in the internal meshing are detailed analysis and checking to improve the transmission efficiency, accuracy and enhance its service life as a starting point to select the modulus parameter selection of the gear, to conduct the gear design calculation, thus finally work out a reasonable reducer structure. 【Key Words】:planetary gear; design; K-H-V; reducer目录第一章绪论 (1)第二章K-H-V行星齿轮 (4)2.1 K-H-V行星齿轮的传动原理及组成 (4)2.2 K-H-V行星齿轮的特点 (6)2.3 K-H-V行星齿轮的现状及发展方向 (7)第三章原始数据及系统组成框图 (11)3.1 原始数据 (11)第四章齿轮的计算 (13)4.1 齿数及齿轮材料的确定 (13)4.2 啮合角、变位系数的确定 (13)4.3 计算四个偏导数 (16)4.4 及相对应的计算 (17)4.5 几何尺寸的计算和限制条件检查 (17)4.6 切削内齿轮插齿刀的选择 (18)4.7 径向切齿干涉 (18)4.8 插齿啮合角 (20)4.9 切削内齿轮其他限制条件检查 (20)4.9.1 展成顶切干涉 (20)4.9.2 齿顶必须是渐开线 (20)4.9.3 切削外齿轮的限制条件 (20)4.10 内啮合的其他限制条件 (21)4.10.1 渐开线干涉 (21)4.10.2 外齿轮齿顶与内齿轮齿根的过渡曲线干涉 (21)4.10.4 顶隙检查 (22)第五章强度计算 (24)5.1 转臂轴承寿命计算 (24)5.2 销轴受力 (25)5.3 销轴的弯曲应力 (26)5.4 销套与浮动盘平面的接触应力 (26)第六章效率计算 (26)6.1 啮合效率 (26)6.1.1 一对内啮合齿轮的效率 (26)6.1.2 行星机构的啮合效率 (27)6.2 输出机构的效率 (27)6.3 转臂轴承效率 (27)6.4 总效率 (28)第七章轴的设计 (28)7.1 轴材料的选择 (28)7.2轴的结构设计 (29)7.4输出轴的机构设计 (31)7.5轴的强度计算 (31)7.6输入轴上受力分析 (32)7.7输入轴支反力分析 (32)7.8轴的强度校核 (33)第八章浮动盘式输出机构设计及强度计算 (34)第九章箱体及附件设计 (34)9.1 箱体知识简介 (34)9.2箱体的刚度 (35)9.2.2 箱体应具有良好的结构工艺性。
(36)9.3 箱体尺寸 (36)第十章减速器附件的设计 (37)10.1 配重设计 (37)10.2 减速器附件设计 (38)总结 (41)参考文献 (42)致谢 (43)第一章绪论机械设计制造及其自动化专业是为了培养从事机械设计、制造行业的人才而开设的专业。
而毕业设计是培养应届毕业生对机械的认识、运用能力,而且也增进对机械工业发展的了解和认知。
1·1 行星齿轮减速器行星齿轮传动在我国已有了许多年的发展史,很早就有了应用。
我国早在南北朝时代,祖冲之就发明了有行星齿轮的差动式指南车。
因此我国对行星齿轮传动的应用是非常早的。
然而,到20世纪60年代,我国才开始对行星齿轮传动进行了较深入、系统的研究和试制工作。
无论是在设计理论方面,还是在试制和应用实践方面,均取得了较大的成就,并获得了许多的研究成果。
近20多年来,尤其是我国改革开放以来,随着我国科学技术水平的进步和发展,我国已从世界上许多工业发达国家引进了大量先进的机械设备和技术,经过我国机械科技人员不断积极的吸收和消化,与时俱进,开拓创新地努力奋进,使我国的行星传动技术有了迅速的发展。
行星轮系减速器较普通齿轮减速器具有体积小、重量轻、效率高及传递功率范围大等优点,逐渐获得广泛应用。
渐开线行星齿轮传动是一种具有动轴线的齿轮传动。
渐开线行星齿轮传动根据基本够件的组成情况可分为:2K—H、3K、及K—H—V三种。
若按各对齿轮的啮合方式,又可分为:NGW型、NW型、NN型、WW型、ZUWGW型、NGWN 型和N型等。
1.2 K-H-V行星齿轮K-H-V传动装置与其它的结构比较更为简单,体积小,承载能力大,耐疲劳,使用可靠.这种行星轮传动中,只有一个太阳轮(用K表示)、一个行星架(用H表示)和一根带输出机构的输出轴(用V表示),故称这种轮系为K—H—V行星轮系。
图1.1渐开线少齿差行星齿轮传动由主动行星架H、中心轮K和行星轮以及输出机构和输出轴V组成,因此属K-H-V传动。
组成啮合齿轮副的(中心)轮和外(行星)齿轮的齿数差很少(一般为1--4)。
故称为少齿差行星齿轮传动。
若齿差为1则称为渐开线一齿差行星齿轮传动。
该传动的传动比大(单机传动比约为7—100以上);体积小,质量小,效率高(η=0.8—0.9);主动轴与从动轴的同轴性好便与装配。
该传动已制定国家标准,并由专业厂家批量生产,以供选用。
第二章K-H-V行星齿轮2.1 K-H-V行星齿轮的传动原理及组成(一)组成K-H-V行星齿轮主要由一个太阳轮K、一个行星架H、一个带输出机构的输出轴V组成。
结构紧凑,体积与质量小(二)传动原理k-h-v型少齿差行星传动如图2-1所示,它主要由一个装在转臂H 上的行星轮和一个固定不动的内齿轮而组成的内齿合行星传动,行星轮的齿数比内齿轮的齿数少1、2或者3、4齿,由于两齿轮差的齿数很少,故叫少齿差,这种少齿差行星齿轮传动用于减速时,是以系杆H为主动件。
由于行星轮相对中心轮有偏心,故在传动时,行星轮1不仅要作公转而且要做自传。
因此,就需要一个能够传递两平行轴之间旋转运动的联轴器,即称偏心输出机构V ,以便把行星轮的自传输图2-1送出来。
由于这种行星轮系,是由一个中心齿轮K ,一个系杆H 和一个偏心输出机构V 所构成的,故简称K-H-V 型行星机构。
它采用削轴式输出结构,当转臂H 转动时迫使行星轮转动,当齿数差为1时,当转动轴转一周时,行星轮相对于内齿反向转动1个齿,因此达到了减速的目的,并通过传动比等于1的销轴式输出机构使轴V 将运动输出。
行星轮既绕输入轴轴心公转又绕自身轴心自转,但两转动方向相反。
在设计少齿差行星齿轮减速器时,如果内齿轮齿数2z 不变,行星齿轮齿数1z 越大,两者之间的齿数差12z z z p -=越小,则传动比越大。
但是,当内齿轮副的齿数差2z 小到一定程度时,将会发生不在啮合位置的齿廓相互重叠现象。
为了使内齿轮副在少齿差时仍然能够正确啮合顺利运转,可以从两条途径消除齿廓重迭干涉:一是降低齿顶高的选用短齿,从齿高方向消除齿廓重迭,一是选择适当的正变位系数,减少外齿轮的 齿顶厚度,增大内齿轮的齿槽宽度,从齿厚方向消除齿廓重迭干涉。
2.2 K-H-V行星齿轮的特点K-H-V行星齿轮的传动比:图2-2因n1=0,解得:故:由上式可以看出,两齿轮的齿轮差越小而传动比就会越大。
当齿数差=1时,这时的传动比为:由此可以总结出K-H-V行星齿轮的优点:(1)传动比大单级传动比约为7到100(2)体积小、质量轻、结构紧凑(3)效率高传动效率为0.8到0.9此外,K-H-V行星齿轮还具有:承载能力大,传动平稳、噪音小,使用寿命长,便与维修等特点。
同时由于主动轴与从动轴的同轴性好,便与装配等优点。
K-H-V行星齿轮的缺点:1.由于齿数差很小,容易造成干涉现象。
2.对于齿轮的加工精度要求很高,且必须采用变位齿轮。
3.由于其结构紧凑,造成其零部件的几何形状较为复杂,加工误差较大。
2.3 K-H-V行星齿轮的现状及发展方向虽然从1960年代以后,渐开线少齿差传动才得到迅速的发展,但是早在1949年,苏联学者就从理论上解决了实现一齿差传动的几何计算问题。