第7章计算机控制器
数控原理与系统第7章数控机床电气控制系统课件

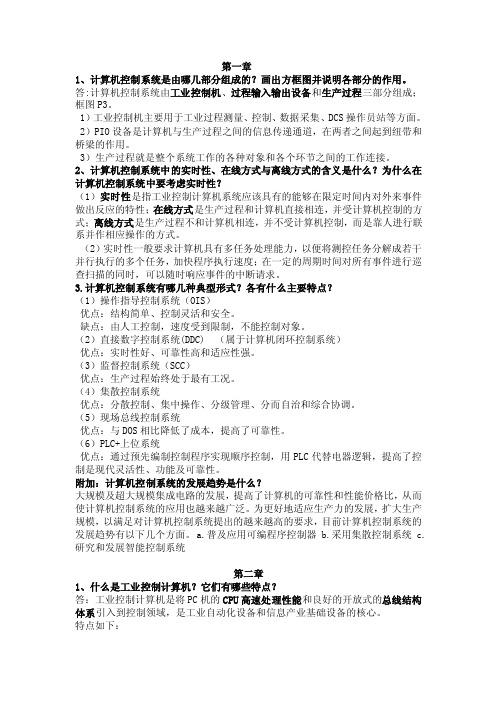
CPU (CNC/PLC)
CPU (CNC)
内 部
PLC
总 线
EPROM
(a) PLC和CNC共用CPU
输出 输入
内
PLC
部
CPU
总
线
EPROM
(b) PLC专用CPU
图7.4 内装型PLC逻辑结构图
输出 输入
第7章 数控机床电气控制系统
7.2 JBK-30型数控系统及其在CJK0630A 车床上的应用
5 43 76
21 3
PE
C' B' A' C B A C' B' A' C B A
~220V
图7.6 JBK-30型数控系统接口定义
第7章 数控机床电气控制系统
7.2.2 CJK0630A数控车床传动结构和控制要求
CJK0630A数控车床是具有两轴联动功能的
教学型数控车床,其结构比较简单,传动系统如
0~9999r/min,用于带专用主轴驱动单元 的连续或分段无级主轴调速。
数控原理与系统》第7章数控机床电气控 制系统课件
第7章 数控机床电气控制系统
3.T功能
T功能即刀具功能,T代码后跟随
2~5位数字表示要求的刀具号和刀具补偿
号。数控机床根据T代码,通过PLC可以管
理刀库,自动更换刀具,也就是说根据刀
数控原理与系统》第7章数控机床电气控 制系统课件
第7章 数控机床电气控制系统
2.S功能
S功能主要完成主轴转速的控制,有
S2位代码和S4位代码两种编程形式。S2位
代码用字母“S”后跟2位十进制数的形式来 指定主轴转速,S00~S99共100级,主要 用于分档调速的主轴。S4位代码用字母“S”
微型计算机原理与接口技术第7章 中断

保护模式: .中断描述符表(IDT):在内存中的首地址保存在CPU 内部的IDTR系统寄存器中。 .CPU响应中断过程中,CPU把中断类型码乘以8,与IDTR 中的基地址相加,指示中断描述符表中的某一中断门或 陷阱门(8个字节组成)。 .CPU将门描述符中的选择符送CS寄存器,并根据选择符 中TI位从LDT或GDT中选择一个段描述符,送入CS的段描 述符寄存器中。
7.6.2 使用串指令装入法
ES设定为0,DI中设定为n*4,使用STOSW指令、即可完 成中断服务程序首地址的装入。 CLI ;禁止中断 MOV AX,0 MOV ES,AX ;置向量表段地址 MOV DI,n*4H ;置向量表偏移地址 MOV AX,OFFSET INT_VCE;中断服务程序偏移地址 CLD STOSW MOV AX,SEG INTV_CE ;中断服务程序段地址 STOSW STI
4 .中断屏蔽寄存器(IMR) 通过IMR可实现对各级中断的有选择的屏蔽。
5.级联(中断最多扩展到64级)
一片8259A只能接收8级中断,当超过8级时,可用 多片8259A级联使用,构成主从关系。 连线要求: .主8259A:级联信号CAS2-CAS0是输出信号; SP端 为“1” .从8259A:级联信号CAS2-CAS0是输入信号; SP端 为“0” .从8259A的INT输出接到主的中断输入端IR上
7.1中断中断: 中断源是外部硬电路。通过CPU的NMI引脚或INTR引脚 向CPU提出中断请求。 INTR:可屏蔽中断,受CPU内标志寄存器中IF位的屏蔽 NMI:非屏蔽中断,不受IF位的屏蔽。 CPU每执行完一条指令,检测NMI和INTR引脚上有无中 断请求。 (2).内部异常中断: 中断源是CPU内部正在执行的过程发生的异常情况。 如除法操作时结果太大 (分母太小) ; 访问某个页或段时,该页或段正好不在内存; 系统的硬件 、软件 (各种系统用表)发生错误。
第7章 显卡

CCUTSOFT
计 机硬件 术 础
第7章 显卡 章
P硬件 术 础
第7章 显卡 章
AGP显卡
CCUTSOFT
计 机硬件 术 础
第7章 显卡 章
PCI-Express X16显卡
CCUTSOFT
计 机硬件 术 础
第7章 显卡 章
7.视频输出/输入接口 7.视频输出/输入接口
CCUTSOFT
计 机硬件 术 础
第7章 显卡 章
显存从封装上来说通常有三种:TQFP(Thin Quad Flat Package,小型方块平面封装)、TSOP (Thin Small Out-Line Package,薄型小尺寸封 装)和mBGA(Micro Ball Grid Array,微型球栅 阵列封装),其外观分别如下图所示:
TQFP
TSOP
mBGA
CCUTSOFT
计 机硬件 术 础
第7章 显卡 章
3、RAMDAC RAMDAC(随机存储数模转换存储器) RAMDAC(随机存储数模转换存储器)是一个数模 转换器,它大多集成在显卡的图形加速芯片内部,一 些专业图形显卡是外置的。 RAMDAC的第一个作用就是将显存里的数据转换 RAMDAC的第一个作用就是将显存里的数据转换 成显示器可以显示的模拟信号;另一个重要作用就是 成显示器可以显示的模拟信号;另一个重要作用就是 提供显卡能够达到的刷新率。刷新率对屏幕的刷新速 度及稳定性有着重要的作用,一般速度越快,输出的 刷新率越高。
CCUTSOFT
计 机硬件 术 础
第7章 显卡 章
显卡接收由主机发出的控制显示系统工作 的指令和显示内容,然后通过输出信号控制 显示器显示各种字符和图形。
CCUTSOFT
第7章专家控制系统

第7章 专家控制系统教学内容首先介绍专家系统基本概念、特征、组成以及基本类型。
然后讲授专家控制系统的工作原理,最后介绍了建立专家系统的步骤和专家控制器。
教学重点1.专家系统的概念,即它是一种模拟人类专家解决领域问题的计算机程序系统。
将专家系统同控制理论和技术相结合,对系统进行控制形成专家控制系统。
把专家系统作为控制器称为专家控制器。
专家系统的基本组成,即由知识库、推理机、解释接口等组成。
2.专家控制系统工作原理。
专家系统设计的基本步骤:认识和阶段化概念,实现阶段,获取知识、构造外部知识库,调试和检验阶段。
教学难点专家系统的工作原理、知识的表示和获取,专家系统的设计。
教学要求1.了解专家系统的概念,理解专家控制系统、专家控制器的概念。
2.掌握专家系统的特征、组成和基本类型。
3.理解专家控制系统的工作原理。
知识的表示和获取。
4.掌握建立专家系统的步骤。
5.了解专家控制器的组成,专家控制器的设计原则。
7.1 概述7.1.1 专家系统的起源与发展人工智能科学家一直在致力于研制在某种意义上讲能够思维的计算机软件,用以“智能化”的处理、解决实际问题。
60年代,科学家们试图通过找到解决多种不同类型问题的通用方法来模拟思维的复杂过程,并将这些方法用于通用目的的程序中。
然而事实证明这种“通用”程序处理的问题类型越多,对任何个别问题的处理能力似乎就越差。
后来,科学家们认识到了问题的关键即计算机界程序解决问题的能力取决于它所具有的知识量的大小。
为使一个程序智能化,必须使其具有相关领域的大量高层知识。
为解决某具体专业领域问题的计算机程序系统的开发研制工作,导致专家系统这一新兴学科的兴起。
从本质上讲,专家系统是一类包含着知识和推理的智能计算机程序,其内部含有大量的某个领域专家水平的知识和经验,能够利用人类专家的知识和解决问题的方法来处理该领域的问题。
1965年斯坦福大学开始建立用于分析化合物内部结构的DENTRAL系统,首先使用了“专家系统”的概念。
第7章B plc技术

图
4.变频器设置 上限频率Pr1=50Hz; (1)上限频率Pr1=50Hz; 下限频率Pr2=30Hz; (2)下限频率Pr2=30Hz; (3)基底频率Pr3=50Hz; 基底频率Pr3=50Hz; 加速时间Pr7=3s; (4)加速时间Pr7=3s;
(5)减速时间Pr8=3s; 减速时间Pr8=3s; 电子过电流保护Pr9=电动机的额 (6)电子过电流保护Pr9=电动机的额 定电流; 定电流; 起动频率Pr13=10Hz; (7)起动频率Pr13=10Hz; DU面板的第三监视功能为变频繁 (8)DU面板的第三监视功能为变频繁 器的输出功率Pr5=14; 器的输出功率Pr5=14;
(4)系统时间应正确显示。 系统时间应正确显示。 改变触摸屏输入寄存器值, (5)改变触摸屏输入寄存器值,观察 程序对应寄存器的值变化。 程序对应寄存器的值变化。 按图9 51连接好 连接好PLC的I/O线路和 (6)按图9-51连接好PLC的I/O线路和 变频器的控制电路及主电路。 变频器的控制电路及主电路。 PLC运行开关保持 , 运行开关保持ON (7)将PLC运行开关保持ON,设定水 压调整为3kg。 压调整为3kg。
图9-50 触摸屏画面
3.PLC程序 PLC程序 根据控制要求,PLC程序如图 51所 程序如图9 根据控制要求,PLC程序如图9-51所 示。
图9-51 PLC程序 PLC程序
9-51 1 PLC 9-51 1 PLC 9-51 1 PLC 9-51 1 PLC
图
9-51 2 PLC 9-51 2 PLC 9-51 2 PLC 9-51 2 PLC 9-51 2 PLC 9-51 2 PLC 9-51 2 PLC 9-51 2 PLC
(2)两台水泵分别由M1、M2电动机 两台水泵分别由M1、M2电动机 拖动,电动机同步转速为3000转/min, 拖动,电动机同步转速为3000转/min, KM1、KM2控制 控制; 由KM1、KM2控制; 切换后起动和停电后起动须5s报 (3)切换后起动和停电后起动须5s报 运行异常可自动切换到备用泵, 警,运行异常可自动切换到备用泵,并 报警; 报警; PLC采用的 采用的PID调节指令 调节指令; (4)PLC采用的PID调节指令;
计算机控制技术PPT 第3章

3. 综合指标
在现代控制理论中,如最优控制系统的没计时,经常使用综
合性能指标来衡量一个控制系统。选择性能指标时.既要考虑
到能对系统的性能做出正确的评价,又要考虑到数学上容易处
理,以及工程上便于实现。因此,选择性能指标时,通常需要
做一定的试探和比较。综合性能指标通常有3种类型。
1)积分型指标:
(1)误差平方的积分:
3.5 线性离散时间系统的能控性与能观测性
线性定常离散时间系统的能控性定义及判据 线性定常离散时间系统的能观测性定义及判据
3.6 应用MATLAB进行离散系统分析
3.1 计算机控制系统概述
计算机控制系统(Computer Control System)是应用计算机 参与控制并借助一些辅助部件与被控对象相联系,以获得 一定控制目的而构成的系统。
为n,Qc为由系数矩阵A和B按一定规则组成的分块矩阵,
表达式是:
n为系统的维数。 判别线性定常系统能控性的判据还有 其他的形式。对于线性时变系统,判别能控性的条件要复 杂一些,而且系统是否能控,常常还依赖于初始时刻的选 取。对于完全能控的线性定常系统,通过特别选定的坐标 变换,可以将其状态方程化成标准的形式,称为能控规范 形。
3.3 控制系统的性能指标描述
对于一个控制系统来说,人们总是要求它能根据实际 的被控对象,在给定信号的作用下达到稳定、快速和准确 的性能指标。对于计算机控制系统,计算机相当于人的大 脑,因此有更多的功能可以实现,系统就能实现最佳的性 能指标。本章描述了控制系统的基本性能指标,以及这些 性能指标与系统的固有参数和设计参数的关系,从而为分 析和设计控制系统提供了依据。
计算机控制技术 --控制组件分布和集成
2008.6
计算机控制技术课后题答案整理版(1到5章基本都有了)
第一章1、计算机控制系统是由哪几部分组成的?画出方框图并说明各部分的作用。
答:计算机控制系统由工业控制机、过程输入输出设备和生产过程三部分组成;框图P3。
1)工业控制机主要用于工业过程测量、控制、数据采集、DCS操作员站等方面。
2)PIO设备是计算机与生产过程之间的信息传递通道,在两者之间起到纽带和桥梁的作用。
3)生产过程就是整个系统工作的各种对象和各个环节之间的工作连接。
2、计算机控制系统中的实时性、在线方式与离线方式的含义是什么?为什么在计算机控制系统中要考虑实时性?(1)实时性是指工业控制计算机系统应该具有的能够在限定时间内对外来事件做出反应的特性;在线方式是生产过程和计算机直接相连,并受计算机控制的方式;离线方式是生产过程不和计算机相连,并不受计算机控制,而是靠人进行联系并作相应操作的方式。
(2)实时性一般要求计算机具有多任务处理能力,以便将测控任务分解成若干并行执行的多个任务,加快程序执行速度;在一定的周期时间对所有事件进行巡查扫描的同时,可以随时响应事件的中断请求。
3.计算机控制系统有哪几种典型形式?各有什么主要特点?(1)操作指导控制系统(OIS)优点:结构简单、控制灵活和安全。
缺点:由人工控制,速度受到限制,不能控制对象。
(2)直接数字控制系统(DDC) (属于计算机闭环控制系统)优点:实时性好、可靠性高和适应性强。
(3)监督控制系统(SCC)优点:生产过程始终处于最有工况。
(4)集散控制系统优点:分散控制、集中操作、分级管理、分而自治和综合协调。
(5)现场总线控制系统优点:与DOS相比降低了成本,提高了可靠性。
(6)PLC+上位系统优点:通过预先编制控制程序实现顺序控制,用PLC代替电器逻辑,提高了控制是现代灵活性、功能及可靠性。
附加:计算机控制系统的发展趋势是什么?大规模及超大规模集成电路的发展,提高了计算机的可靠性和性能价格比,从而使计算机控制系统的应用也越来越广泛。
为更好地适应生产力的发展,扩大生产规模,以满足对计算机控制系统提出的越来越高的要求,目前计算机控制系统的发展趋势有以下几个方面。
第三篇(第7,8,9章)模型预测控制及其MATLAB实现

0 u(k) y0 (k 1) (7-7)
u(k 1)
y0
(k
2)
yˆ (k
n)
an
an1
anm1
u(k
m
1)
y0
(k
n)
记
Yˆ [ yˆ(k 1), yˆ(k 2), , yˆ(k n)]T
将式(3-4)写成矩阵形式
( j 1,2, , n)
(7-5)
yˆ(k 1) a1
yˆ (k
2)
a2
a1
yˆ (k
n)
an
an1
u(k) y0 (k 1)
u(k 1)
y0
4
目前提出的模型预测控制算法主要有基于非参数 模型的模型算法控制(MAC)和动态 矩阵控制( DMC),以及基于参数模型的广义预测控制(GPC )和广义预测极点配置控制 (GPP)等。其中,模 型算法控制采用对象的脉冲响应模型,动态矩阵控 制采用对象的阶跃响应模型,这两种模型都具有易 于获得的优点;广义预测控制和广义预测极点配置 控制是预测控制思想与自适应控制的结合,采用 CARIMA模型(受控自回归积分滑动平均模型), 具有参数数目少并能够在线估计的优点,并且广义 预测极点配置控制进一步采用极点配置技术,提高 了预测控制系统的闭环稳定性和鲁输入,预测系统
未来输出值。GPC采用CARIMA模型作为预测模型
,模型CARIMA是"Contrlled Auto-Regressive Integrated
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第7章控制器7.1 控制器的功能和组成
7.3 操作命令分析7.2 指令周期
7.4 控制信号举例7.5 控制器设计7.1 控制器的组成一、控制器的功能1、从存储器取出指令,送到控制器里指令寄存器IR中
2、对指令进行译码,产生出完成指令对应的时序控制信号,并由CPU引脚将控制信号加到系统总线里的控制线中去,从而控制相关部件动作,完成指令的执行。
3. 控制程序输入及结果的输出4. 总线管理5. 处理异常情况和特殊请求二、控制器的组成1.程序计数器PC存放当前正在执行的指令地址或下一条要执行指令的地址。具有自动加1(或加2)功能。
2.指令寄存器IR存放次内存中取出的指令。3.指令译码器对指令寄存器IR中指令操作码进行译码,译码出的信号加到“操作信号形成部件”中一起形成该指令所需要的,具有一定时序关系的操作控制信号序列。
8.14.操作控制信号形成部件根据指令操作码的译码信号以及时序信号产生部件发出的时序信号,分波次发出控制信号,控制计算机相关部件,完成指令的执行。
5. 时序信号产生器产生机器周期信号和时钟信号,控制指令执行大的步骤(机器周期),及每个大步骤下的小的执行步骤(时钟周期)。6.地址寄存器MAR存放指令的地址或操作数的内存地址。7. 数据缓冲寄存器MDR内存写入数据或读出的指令或数据,都要经过MDR进行缓冲。7.2 指令周期一、指令周期的基本概念1 . 指令周期取出并执行一条指令所需的全部时间
完成一条指令执行取指、分析取指阶段取指周期执行阶段执行周期(取指、分析)(执行指令)指令周期取指周期执行周期2. 每条指令的指令周期不同取指周期指令周期
取指周期执行周期
指令周期
NOPADD mem
MUL mem取指周期执行周期
指令周期„3. 具有间接寻址的指令周期4. 带有中断周期的指令周期取指周期间址周期指令周期执行周期
取指周期间址周期指令周期执行周期中断周期5. 指令周期流程取指周期
执行周期有间址吗?
有中断吗?间址周期
中断周期
是
是否
否6. CPU 工作周期的标志CPU 访存有四种性质取指令取地址取操作数存程序断点取指周期间址周期执行周期中断周期
FEDINDDINTDCLK1FE1IND1EX1INTEXD
CPU 的4个工作周期1. 取指周期数据流二、指令周期的数据流
MDRCUMARPC存储器
CPU地址总线数据总线控制总线
IR+1 2. 间址周期数据流
CUMARCPU地址总线数据总线控制总线PCIR存储器
MDR3. 执行周期数据流4 . 中断周期数据流不同指令的执行周期数据流不同
MDRCUMARCPU地址总线数据总线控制总线PC存储器三、多级时序系统1. 机器周期(1) 机器周期的概念
(2) 确定机器周期需考虑的因素
(3) 基准时间的确定
所有指令执行大步骤过程中的一个基准时间
指令的执行步骤--决定指令周期由几个机器周期组成。每一步骤所需的时间--决定机器周期的大小。
•以完成最复杂指令功能的时间为准•以访问一次存储器的时间为基准若指令字长= 存储字长取指周期=机器周期2. 时钟周期(节拍、状态)
一个机器周期内可完成若干个微操作每个微操作需一定的时间
时钟周期是控制计算机操作的最小单位时间按照一个机器周期内操作包含小步骤数决定一个机器周期决定由几个时钟周期组成。
用时钟周期控制产生一个或几个微操作命令CLKT0
T1
T2
T3
时钟周期2. 节拍发生器输出多个频率相同的节拍信号机器周期机器周期
T0T1T2T3T0T1T2T33. 多级时序系统一个指令周期包含几个大步骤就包含若干个机器周期一个机器周期包含几个小步骤,就由几个时钟周期构成。每个时钟周期发送小步骤执行需要的控制信号
CLK
机器周期机器周期机器周期(取指令)(取有效地址)(执行指令)指令周期
T0T1T2T3T0T1T2T3T0T1T2T3
机器周期机器周期(取指令)(执行指令)指令周期
T0T1T2T3T0T1T2节拍
(状态)
节拍(状态)7.3操作命令的分析完成一条指令分4 个工作周期取指周期间址周期执行周期中断周期一、取指周期PC MAR 地址线
1 RM ( MAR ) MDRMDR IR
( PC ) + 1 PC+1
MDR
CU
MARPC
IR存储器
CPU地址总线
数据总线控制总线
7.3操作命令的分析
OP(IR)CU二、间址周期
M ( MAR ) MDR1 RAd ( IR ) MARMDR Ad ( IR )
指令形式地址MAR
MDRCUMARCPU地址总线数据总线控
制总线
IR存储器三、执行周期1. 非访存指令(1) CLA清A
(2) COM取反
(4) CSL循环左移(3) SHR 算术右移
(5) STP停机指令
0 ACCACC ACCL(ACC) R(ACC), ACC0ACC0
R(ACC) L(ACC), ACC0ACCn
0 G2. 访存指令Ad(IR) MAR1 RM(MAR) MDR(ACC) + (MDR) ACC
Ad(IR) MAR1 WACC MDRMDR M(MAR)
STA X
ADD X(2) 存数指令(1) 加法指令(3) 取数指令Ad ( IR ) MAR1 RM ( MAR ) MDRMDR ACC 3. 转移指令
(1) 无条件转
(2) 条件转移Ad ( IR ) PC
A0 •Ad ( IR ) + A0 ( PC ) PC
LDA XJMP XBAN X(负则转)4. 三类指令的指令周期取指周期执行周期取指周期执行周期
取指周期执行周期取指周期间址周期执行周期
非访存指令周期直接访存指令周期间接访存指令周期转移指令周期取指周期间址周期执行周期间接转移指令周期四、中断周期程序断点存入“0 ”地址程序断点进栈0MAR1 WPC MDRMDR M ( MAR )向量地址PC0 EINT(置“0”)0 EINT(置“0”)向量地址PCMDR M ( MAR )PC MDR1 W中断识别程序入口地址M PC( SP ) 1MAR7.4控制信号分析
一、控制单元的外特性指令寄存器
控制单元CU…
时钟标志
CPU 内部的控制信号
到系统总线的控制信号来自系统总线的控制信号
系统总线1. 输入信号(1) 时钟
(2) 指令寄存器(4) 外来信号(3) 标志
CU 受时钟控制
控制信号与操作码有关OP ( IR ) CUCU 受标志控制INTR 中断请求HRQ 总线请求
一个时钟脉冲发一个操作命令或一组需同时执行的操作命令
如2. 输出信号(1) CPU 内的各种控制信号
(2) 送至控制总线的信号RiRj
(PC) + 1 PC
INTAHLDA
访存控制信号访IO/存储器的控制信号读命令写命令中断响应信号总线响应信号
MREQIO/MRDWR
ALU+、-、与、或……二、控制信号举例ACCU时钟
ALU
………
控制信号标志
控制
信号C
0C
1
C2
C3
C4
取指周期以ADD @ X 为例PCIR
1. 不采用CPU 内部总线的方式
PCM D R
M A R