线程同步有几种实现方法
多线程的四种实现方式

多线程的四种实现方式
多线程是指在一个进程中同时运行多个线程,以提高程序的运行
效率。
多线程的实现方式有以下四种:
1. 继承Thread类
通过继承Thread类,重写run方法来实现多线程。
可以通过创
建Thread对象并调用start方法来启动线程。
2. 实现Runnable接口
通过实现Runnable接口,重写run方法来实现多线程。
可以通
过创建Thread对象并将Runnable对象传递给其构造函数来启动线程。
3. 实现Callable接口
通过实现Callable接口,重写call方法来实现多线程。
可以通
过创建FutureTask对象并将Callable对象传递给其构造函数来启动
线程。
4. 线程池
线程池可以提高线程的使用效率,避免线程频繁创建和销毁的开销。
可以通过ThreadPoolExecutor类来创建线程池,可以指定线程池
的大小、工作队列以及拒绝策略等参数。
Delphi关于多线程同步的一些方法(转)
Delphi关于多线程同步的⼀些⽅法(转)线程是进程内⼀个相对独⽴的、可调度的执⾏单元。
⼀个应⽤可以有⼀个主线程,⼀个主线程可以有多个⼦线程,⼦线程还可以有⾃⼰的⼦线程,这样就构成了多线程应⽤了。
由于多个线程往往会同时访问同⼀块内存区域,频繁的访问这块区域,将会增加产⽣线程冲突的概率。
⼀旦产⽣了冲突,将会造成不可预料的结果(该公⽤区域的值是不可预料的)可见处理线程同步的必要性。
注意:本⽂中出现的所有代码都是⽤DELPHI描述的,调试环境为Windows me ,Delphi 6。
其中所涉及的Windows API函数可以从MSDN获得详细的。
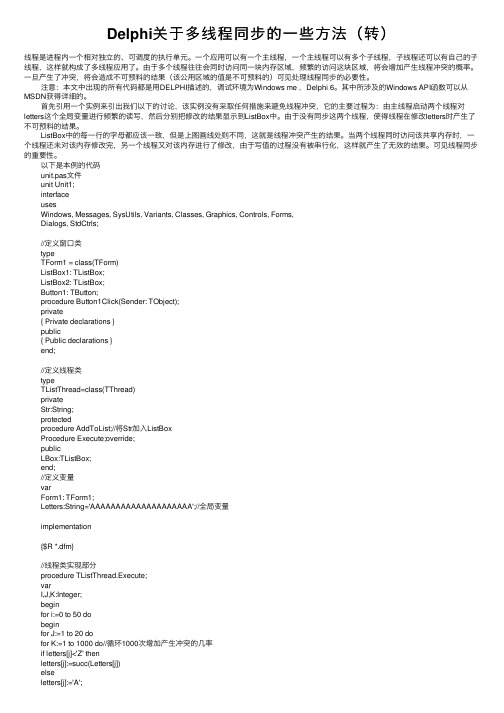
⾸先引⽤⼀个实例来引出我们以下的讨论,该实例没有采取任何措施来避免线程冲突,它的主要过程为:由主线程启动两个线程对letters这个全局变量进⾏频繁的读写,然后分别把修改的结果显⽰到ListBox中。
由于没有同步这两个线程,使得线程在修改letters时产⽣了不可预料的结果。
ListBox中的每⼀⾏的字母都应该⼀致,但是上图画线处则不同,这就是线程冲突产⽣的结果。
当两个线程同时访问该共享内存时,⼀个线程还未对该内存修改完,另⼀个线程⼜对该内存进⾏了修改,由于写值的过程没有被串⾏化,这样就产⽣了⽆效的结果。
可见线程同步的重要性。
以下是本例的代码 unit.pas⽂件 unit Unit1; interface uses Windows, Messages, SysUtils, Variants, Classes, Graphics, Controls, Forms, Dialogs, StdCtrls; //定义窗⼝类 type TForm1 = class(TForm) ListBox1: TListBox; ListBox2: TListBox; Button1: TButton; procedure Button1Click(Sender: TObject); private { Private declarations } public { Public declarations } end; //定义线程类 type TListThread=class(TThread) private Str:String; protected procedure AddToList;//将Str加⼊ListBox Procedure Execute;override; public LBox:TListBox; end; //定义变量 var Form1: TForm1; Letters:String='AAAAAAAAAAAAAAAAAAAA';//全局变量 implementation {$R *.dfm} //线程类实现部分 procedure TListThread.Execute; var I,J,K:Integer; begin for i:=0 to 50 do begin for J:=1 to 20 do for K:=1 to 1000 do//循环1000次增加产⽣冲突的⼏率 if letters[j]<'Z' then letters[j]:=succ(Letters[j]) else letters[j]:='A'; str:=letters; synchronize(addtolist);//同步访问VCL可视 end; end; procedure TListThread.AddToList; begin LBox.Items.Add(str);//将str加⼊列表框 end; //窗⼝类实现部分 procedure TForm1.Button1Click(Sender: TObject); var th1,th2:TListThread; begin Listbox1.Clear; Listbox2.Clear; th1:=tlistThread.Create(true);//创建线程1 th2:=tlistThread.Create(true);//创建线程2 th1.LBox:=listBox1; th2.LBox:=listBox2; th1.Resume;//开始执⾏ th2.Resume; end; end. 由上例可见,当多个线程同时修改⼀个公⽤变量时,会产⽣冲突,所以我们要设法防⽌它,这样我们开发的多线程应⽤才能够稳定地运⾏。
多线程之线程同步的方法(7种)

多线程之线程同步的⽅法(7种)同步的⽅法:⼀、同步⽅法 即有synchronized关键字修饰的⽅法。
由于java的每个对象都有⼀个内置锁,当⽤此关键字修饰⽅法时,内置锁会保护整个⽅法。
在调⽤该⽅法前,需要获得内置锁,否则就处于阻塞状态。
注: synchronized关键字也可以修饰静态⽅法,此时如果调⽤该静态⽅法,将会锁住整个类。
⼆、同步代码块 即有synchronized关键字修饰的语句块。
被该关键字修饰的语句块会⾃动被加上内置锁,从⽽实现同步代码如:synchronized(object){}注:同步是⼀种⾼开销的操作,因此应该尽量减少同步的内容。
通常没有必要同步整个⽅法,使⽤synchronized代码块同步关键代码即可。
package com.xhj.thread;/*** 线程同步的运⽤** @author XIEHEJUN**/public class SynchronizedThread {class Bank {private int account = 100;public int getAccount() {return account;}/*** ⽤同步⽅法实现** @param money*/public synchronized void save(int money) {account += money;}/*** ⽤同步代码块实现** @param money*/public void save1(int money) {synchronized (this) {account += money;}}}class NewThread implements Runnable {private Bank bank;public NewThread(Bank bank) {this.bank = bank;}@Overridepublic void run() {for (int i = 0; i < 10; i++) {// bank.save1(10);bank.save(10);System.out.println(i + "账户余额为:" + bank.getAccount());}}}/*** 建⽴线程,调⽤内部类*/public void useThread() {Bank bank = new Bank();NewThread new_thread = new NewThread(bank);System.out.println("线程1");Thread thread1 = new Thread(new_thread);thread1.start();System.out.println("线程2");Thread thread2 = new Thread(new_thread);thread2.start();}public static void main(String[] args) {SynchronizedThread st = new SynchronizedThread();eThread();}}=====================================⽰例加讲解同步是多线程中的重要概念。
用回调函数实现多线程同步
用回调函数实现多线程同步使用回调函数实现多线程同步多线程编程是一种常见的并发编程模型,能够有效提高程序的性能和响应速度。
然而,在多线程环境下,线程之间的同步问题会变得非常复杂。
为了解决这个问题,回调函数被广泛应用于多线程同步中。
回调函数是一种特殊的函数指针,它允许将一个函数作为参数传递给另一个函数,并在特定事件发生时被调用。
在多线程环境中,我们可以使用回调函数来实现线程之间的同步。
1. 线程创建和回调函数概述在多线程编程中,我们通常会创建多个线程来执行不同的任务。
为了实现线程之间的同步,我们可以在创建线程时指定一个回调函数,用于在线程完成任务后通知主线程。
2. 线程同步的步骤使用回调函数实现多线程同步的步骤如下:步骤一:定义一个回调函数,用于在线程完成任务后执行特定的操作。
步骤二:创建线程,并将定义的回调函数作为参数传递给线程。
步骤三:线程执行完任务后调用回调函数,并将任务结果作为参数传递给回调函数。
步骤四:在回调函数中执行特定的操作,如更新共享变量、发送信号等。
通过这种方式,我们可以在多线程环境中实现线程的同步和协作。
3. 示例代码下面是一个使用回调函数实现多线程同步的示例代码:```pythonimport threading# 定义回调函数,用于在线程完成后通知主线程def callback_func(result):print("线程执行完毕,结果为:", result)# 定义线程函数,执行耗时操作def thread_func(callback):# 执行具体的任务result = 1 + 2# 调用回调函数,将任务结果传递给回调函数callback(result)# 创建线程,并指定回调函数thread = threading.Thread(target=thread_func, args=(callback_func,))# 启动线程thread.start()# 主线程继续执行其他任务print("主线程继续执行")```在上述代码中,我们首先定义了一个回调函数`callback_func`,用于在线程完成后通知主线程。
线程同步方法有哪些
线程同步方法有哪些
线程同步的常用方法有:
1. 使用锁:例如使用`Lock`类、`ReentrantLock`类或`synchronized`关键字来实现线程同步。
2. 使用条件变量:例如使用`Condition`类来控制线程等待和唤醒。
3. 使用信号量:例如使用`Semaphore`类来控制线程的并发数。
4. 使用栅栏:例如使用`CyclicBarrier`类来控制多个线程在某个点上同步。
5. 使用阻塞队列:例如使用`BlockingQueue`类来控制线程的顺序执行。
6. 使用计数器:例如使用`CountDownLatch`类来控制线程的等待和唤醒。
7. 使用原子类:例如使用`AtomicInteger`类来保证操作的原子性。
8. 使用同步容器:例如使用`ConcurrentHashMap`类来保证线程安全。
9. 使用线程池:例如使用`ExecutorService`类来调度线程的执行顺序。
10. 使用并发工具类:例如使用`ReadWriteLock`类来实现多线程对某个资源的读写操作。
线程练习题——精选推荐

线程练习题答:有两种实现方法,分别是继承Thread类与实现Runnable接口用synchronized关键字修饰同步方法反对使用stop,是因为它不安全。
它会解除由线程获取的所有锁定,而且如果对象处于一种不连贯状态,那么其他线程能在那种状态下检查和修改它们。
结果很难检查出真正的问题所在。
suspend方法容易发生死锁。
调用suspend 的时候,目标线程会停下来,但却仍然持有在这之前获得的锁定。
此时,其他任何线程都不能访问锁定的资源,除非被”挂起”的线程恢复运行。
对任何线程来说,如果它们想恢复目标线程,同时又试图使用任何一个锁定的资源,就会造成死锁。
所以不应该使用suspend,而应在自己的Thread类中置入一个标志,指出线程应该活动还是挂起。
若标志指出线程应该挂起,便用wait命其进入等待状态。
若标志指出线程应当恢复,则用一个notify重新启动线程。
2、sleep 和 wait 有什么区别?答:sleep是线程类的方法,导致此线程暂停执行指定时间,给执行机会给其他线程,但是监控状态依然保持,到时后会自动恢复。
调用sleep不会释放对象锁。
wait是Object类的方法,对此对象调用wait方法导致本线程放弃对象锁,进入等待此对象的等待锁定池,只有针对此对象发出notify方法后本线程才进入对象锁定池准备获得对象锁进入运行状态。
3、同步和异步有何异同,在什么情况下分别使用他们?举例说明。
答:如果数据将在线程间共享。
例如正在写的数据以后可能被另一个线程读到,或者正在读的数据可能已经被另一个线程写过了,那么这些数据就是共享数据,必须进行同步存取。
当应用程序在对象上调用了一个需要花费很长时间来执行的方法,并且不希望让程序等待方法的返回时,就应该使用异步编程,在很多情况下采用异步途径往往更有效率。
4、启动一个线程是用run还是start?答:启动一个线程是调用start方法,使线程所代表的虚拟处理机处于可运行状态,这意味着它可以由JVM调度并执行。
C#实现多线程的同步方法详解
C#实现多线程的同步⽅法详解本⽂主要描述在C#中线程同步的⽅法。
线程的基本概念⽹上资料也很多就不再赘述了。
直接接⼊主题,在多线程开发的应⽤中,线程同步是不可避免的。
在.Net框架中,实现线程同步主要通过以下的⼏种⽅式来实现,在MSDN的线程指南中已经讲了⼏种,本⽂结合作者实际中⽤到的⽅式⼀起说明⼀下。
1. 维护⾃由锁(InterLocked)实现同步2. 监视器(Monitor)和互斥锁(lock)3. 读写锁(ReadWriteLock)4. 系统内核对象1) 互斥(Mutex), 信号量(Semaphore), 事件(AutoResetEvent/ManualResetEvent)2) 线程池除了以上的这些对象之外实现线程同步的还可以使⽤Thread.Join⽅法。
这种⽅法⽐较简单,当你在第⼀个线程运⾏时想等待第⼆个线程执⾏结果,那么你可以让第⼆个线程Join进来就可以了。
⾃由锁(InterLocked)对⼀个32位的整型数进⾏递增和递减操作来实现锁,有⼈会问为什么不⽤++或--来操作。
因为在多线程中对锁进⾏操作必须是原⼦的,⽽++和--不具备这个能⼒。
InterLocked类还提供了两个另外的函数Exchange, CompareExchange⽤于实现交换和⽐较交换。
Exchange操作会将新值设置到变量中并返回变量的原来值: int oVal = InterLocked.Exchange(ref val, 1)。
监视器(Monitor)在MSDN中对Monitor的描述是: Monitor 类通过向单个线程授予对象锁来控制对对象的访问。
Monitor类是⼀个静态类因此你不能通过实例化来得到类的对象。
Monitor 的成员可以查看MSDN,基本上Monitor的效果和lock是⼀样的,通过加锁操作Enter设置临界区,完成操作后使⽤Exit操作来释放对象锁。
不过相对来说Monitor的功能更强,Moniter可以进⾏测试锁的状态,因此你可以控制对临界区的访问选择,等待or离开, ⽽且Monitor还可以在释放锁之前通知指定的对象,更重要的是使⽤Monitor可以跨越⽅法来操作。
cuda的同步机制
CUDA的同步机制1. 引言CUDA(Compute Unified Device Architecture)是由英伟达(NVIDIA)推出的一种并行计算平台和编程模型。
它允许开发人员在GPU(Graphics Processing Unit,图形处理器)上进行高性能计算。
在CUDA编程中,同步机制是非常重要的,它可以确保并行计算中的各个线程在需要的时候进行同步,以避免数据竞争和不一致的结果。
本文将详细介绍CUDA的同步机制,包括线程同步、块同步和设备同步,以及它们的实现原理和使用方法。
2. 线程同步在CUDA中,每个线程都有自己的线程编号(thread ID),线程可以通过线程编号来访问不同的数据。
线程同步是指在并行计算中,多个线程之间需要相互协作,保证计算的正确性和一致性。
2.1. 线程同步的实现方法CUDA提供了多种线程同步的实现方法,包括互斥锁(mutex)、信号量(semaphore)和屏障(barrier)等。
•互斥锁:互斥锁是一种常用的线程同步机制,它可以确保在任意时刻只有一个线程可以访问共享资源。
CUDA中的互斥锁可以通过__syncthreads()函数来实现,具体的使用方法是在需要同步的地方调用__syncthreads()函数,以确保所有线程都执行到该点。
•信号量:信号量是一种用于多线程之间同步的机制,它可以控制多个线程的执行顺序。
CUDA中的信号量可以通过atomicAdd()函数来实现,具体的使用方法是将一个共享的变量作为信号量,通过原子加法操作来控制线程的执行顺序。
•屏障:屏障是一种同步机制,它可以确保在某个点之前的所有线程都执行完毕后再继续执行后续的代码。
CUDA中的屏障可以通过__syncthreads()函数来实现,具体的使用方法是在需要同步的地方调用__syncthreads()函数。
2.2. 线程同步的应用场景线程同步在CUDA编程中有着广泛的应用场景,例如:•数据的初始化:在并行计算中,多个线程可能同时访问同一个共享的数据结构,为了避免数据的竞争和不一致,需要使用线程同步来确保数据的正确初始化。
四种进程或线程同步互斥的控制方法
四种进程或线程同步互斥的控制方法1、临界区:通过对多线程的串行化来访问公共资源或一段代码,速度快,适合控制数据访问。
2、互斥量:为协调共同对一个共享资源的单独访问而设计的。
3、信号量:为控制一个具有有限数量用户资源而设计。
4、事件:用来通知线程有一些事件已发生,从而启动后继任务的开始。
一临界区临界区的使用在线程同步中应该算是比较简单,说它简单还是说它同后面讲到的其它方法相比更容易理解。
举个简单的例子:比如说有一个全局变量(公共资源)两个线程都会对它进行写操作和读操作,如果我们在这里不加以控制,会产生意想不到的结果。
假设线程A 正在把全局变量加1然后打印在屏幕上,但是这时切换到线程B,线程B又把全局变量加1然后又切换到线程A,这时候线程A打印的结果就不是程序想要的结果,也就产生了错误。
解决的办法就是设置一个区域,让线程A在操纵全局变量的时候进行加锁,线程B如果想操纵这个全局变量就要等待线程A释放这个锁,这个也就是临界区的概念。
二互斥体windows api中提供了一个互斥体,功能上要比临界区强大。
也许你要问,这个东东和临界区有什么区别,为什么强大?它们有以下几点不一致:1.critical section是局部对象,而mutex是核心对象。
因此像waitforsingleobject是不可以等待临界区的。
2.critical section是快速高效的,而mutex同其相比要慢很多3.critical section使用范围是单一进程中的各个线程,而mutex由于可以有一个名字,因此它是可以应用于不同的进程,当然也可以应用于同一个进程中的不同线程。
4.critical section 无法检测到是否被某一个线程释放,而mutex在某一个线程结束之后会产生一个abandoned的信息。
同时mutex只能被拥有它的线程释放。
下面举两个应用mutex 的例子,一个是程序只能运行一个实例,也就是说同一个程序如果已经运行了,就不能再运行了;另一个是关于非常经典的哲学家吃饭问题的例子。
C#中几种同步的方法
C#中⼏种同步的⽅法在⽹上有很多关于线程同步的⽂章,其实线程同步有好⼏种⽅法,下⾯简单的做⼀下归纳。
⼀、volatile关键字 volatile是最简单的⼀种同步⽅法,当然简单是要付出代价的。
它只能在变量⼀级做同步,volatile的含义就是告诉处理器,不要将我放⼊⼯作内存,请直接在主存操作我。
因此,当多线程同时访问该变量时,都将直接操作主存,从本质上做到了变量共享。
能够被标识为volatile的必须是以下⼏种类型:(摘⾃MSDN) # Any reference type. # Any pointer type (in an unsafe context). # The types sbyte, byte, short, ushort, int, uint, char, float, bool. # An enum type with an enum base type of byte, sbyte, short, ushort, int, or uint. 如: Code public class A { private volatile int _i; public int I { get { return _i; } set { _i = value; } } } 但volatile并不能实现真正的同步,因为它的操作级别只停留在变量级别,⽽不是原⼦级别。
如果是在单处理器系统中,是没有任何问题的,变量在主存中没有机会被其他⼈修改,因为只有⼀个处理器,这就叫作processor Self-Consistency。
但在多处理器系统中,可能就会有问题。
每个处理器都有⾃⼰的data cach,⽽且被更新的数据也不⼀定会⽴即写回到主存。
所以可能会造成不同步,但这种情况很难发⽣,因为cach的读写速度相当快,flush的频率也相当⾼,只有在压⼒测试的时候才有可能发⽣,⽽且⼏率⾮常⾮常⼩。
⼆、lock关键字 lock是⼀种⽐较好⽤的简单的线程同步⽅式,它是通过为给定对象获取互斥锁来实现同步的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
线程同步有几种实现方法
线程同步是指多个线程协调执行,保证线程之间互不干扰,正确完成任务的一种机制。
线程同步常常用于解决多线程环境下的资源共享和互斥操作问题。
在实际应用中,线程同步可以通过多种方法来实现,下面将详细介绍几种常用的线程同步实现方法。
1. 互斥锁:互斥锁是最常用的线程同步机制之一,它通过在临界区代码段前后设置锁机制,确保同一时间只有一个线程可以进入临界区执行。
当一个线程获得了锁之后,其他线程就需要等待。
互斥锁可以保护共享资源,避免多个线程同时访问,保证数据的一致性和完整性。
在实现上,互斥锁可以使用操作系统提供的互斥量或者使用编程语言本身提供的互斥锁库。
2. 信号量:信号量是一种经典的线程同步机制,它可以用于控制多个线程在临界区之前的进入次数,从而限制同时访问临界区的线程数量。
信号量通常有两种类型:计数型信号量和二进制信号量。
计数型信号量可以设置初始值,并在每次进入临界区时递减,离开临界区时递增;而二进制信号量只有0和1两个状态,用于实现互斥访问。
3. 条件变量:条件变量是一种线程同步机制,用于实现线程间的等待和通知机制。
它可以实现线程的阻塞等待某种特定条件成立,当条件成立时,线程被唤醒继续执行。
条件变量需要和互斥锁配合使用,通过在临界区中设置条件变量的等待和通知操作,可以有效地实现线程间的同步。
4. 事件:事件是一种线程同步机制,它可以用于不同线程之间的通信和同步。
事件可以分为自动复位事件和手动复位事件两种类型。
自动复位事件在被一个等待线程唤醒后会自动复位为无信号状态;而手动复位事件需要被显式地复位为无信号状态。
通过事件的设置和复位操作,可以实现线程的等待和唤醒机制。
5. 读写锁:读写锁是一种特殊的锁机制,用于解决读写冲突问题。
在多线程环境下,如果有多个线程同时对一个共享资源进行读操作,是无需互斥的;但如果有一个线程进行写操作,就需要互斥地进行。
读写锁可以在多线程下实现高效的读写操作,提高程序的并发性能。
除了上述几种常用的线程同步机制外,还有其他一些实现方法,如屏障、信箱等。
屏障可以用于多个线程的同步点,当线程到达屏障后,需要等待其他线程都到达后才能继续执行;信箱可以用于线程间的消息传递和同步,一个线程向信箱发送消息,另一个线程从信箱中接收消息,实现线程之间的通信和同步。
总结起来,线程同步是保证多线程正确协作的重要机制,通过互斥锁、信号量、条件变量、事件、读写锁等不同的实现方法,可以实现线程的同步和互斥操作,确保多线程的正确执行。
每种线程同步方法都有其适用的场景,开发者需要根据具体情况选择合适的方法来实现线程同步,从而保证程序的正确性和效率。