仿真器及实验平台的使用
IAR软件使用教材
IAR软件使用教材第二章软件开发工具介绍本章主要针对实验平台开发过程中用到的软件的使用方法做简要的介绍。
实验平台用到的开发软件为IAR Embedded Workbench for430(以下简称IAR EW430)。
IAR Systems是全球领先的嵌入式系统开发工具和服务的供应商。
公司成立于1983年,迄今32年,提供的产品和服务涉及到嵌入式系统的设计、开发和测试的每一个阶段,包括:带有C/C++编译器和调试器的集成开发环境(IDE)、实时操作系统和中间件、开发套件、硬件仿真器以及状态机建模工具。
这里介绍的IAR EW430软件提供了工程管理、程序编译、代码下载调试等所有功能。
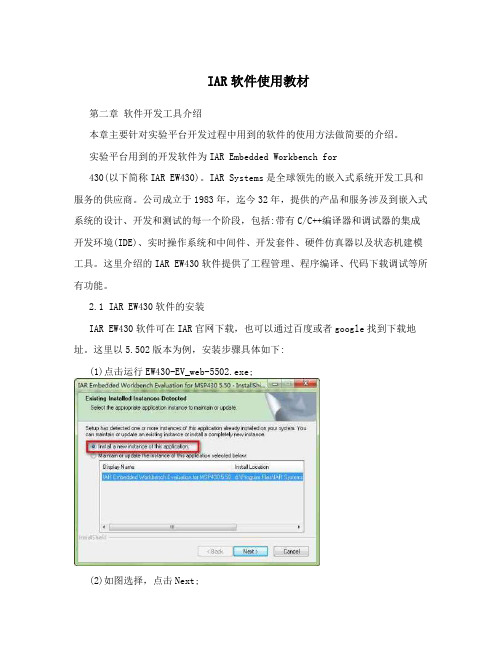
2.1 IAR EW430软件的安装IAR EW430软件可在IAR官网下载,也可以通过百度或者google找到下载地址。
这里以5.502版本为例,安装步骤具体如下:(1)点击运行EW430-EV_web-5502.exe;(2)如图选择,点击Next;(3)继续点击Next;(4)继续点击Next;(5)如上图选择,点击Next;(6)在上述步骤中Name、Company可以自己随便填写,License 需要用到注册机。
点击IAR kegen PartA.exe。
(7)选择Embedded Workbench For MSP430 v5.5后,点击Generate,会得到License和License key;(8)将License复制到第(5)步骤中License的地方,点Next;(9)将注册机中得到的License key复制粘贴到License key栏,点击Next;(10)选择Complete,点击Next;(11)选择合适的安装路径,点击Next;(12)点击Next;(13)点击Install,等待安装完成即可。
2.2 IAR EW430软件的使用在正确完成IAR EW430安装之后,就可以使用它进行编程。
第八课-Visualdsp,开发板和仿真器分析
灵活的编译链接器,Visual DSP++的编译链接器支持对整个项目或项 目中的某个设计文件进行编译链接。Visual DSP++允许只编译链接某 些指定文件或只对修改过的文件进行编译链接。编译链接过程中的信 息会在信息窗口中显示,用户可以通过双击出错信息来定位出错位置。
Visualdsp,开发板和仿真器
Visualdsp开发环境介绍 Visualdsp下软件调试介绍 评估板和系统开发板(硬件实验平台)介绍 仿真器介绍
Visualdsp开发环境介绍
Visual DSP++仿真开发软件概述
Visual DSP++是ADI公司DSP器件的可视化集成开发调试环境 (IDDE),可以完成DSP应用开发中所需的程序编制、仿真、调试 等所有功能。Visual DSP++可以在Windows9x、WindowsNT、 Windows2000和WindowsXP平台下运行,支持 SHARC、 TigerSHARC、ADSP-218x和Blackfin®系列单处理器及多处理 器的开发。Visual DSP++具有如下特点:
方便的在线帮助功能 ,在线帮助信息包括了Visual DSP++全部特性 信息和Visual DSP++的使用信息,用户可以使用搜索及索引功能找到 自己所要的帮助条目。
多处理器支持,Visual DSP++的链接器和加载器使用一个.ldf文件来 描述系统定义,可以使多个处理器共享代码和存储器,同时减少配置 文件大小,缩短程序加载时间。
单片机虚拟实验平台的构建与应用
b t r = O: idi
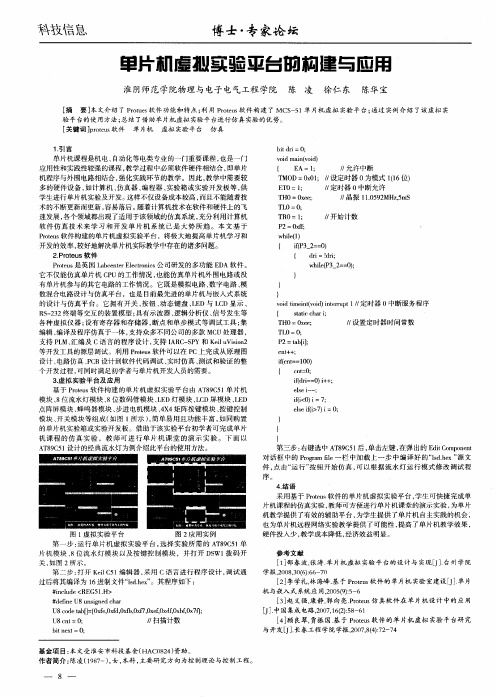
单片机课程是机电 、 自动化等电类专业 的一 门重要课程 , 也是一 门 应用性和实践性较强的课程 , 教学过程中必 须软件 硬件相结合 , 即单 片 机程序与外围电路相结合 , 强化实践 环节 的教学 。因此 , 教学 中需要较 多的硬件设备 , 如计算机 、 仿真器 、 编程器 、 实验箱 或实验开发板等 , 供 学生进行单 片机实验及开发。 这样不仅设备成本较高 , 而且不能随着技 术的不断更新而更新 , 容易落后 。 随着计算机技术在软件和硬件上 的飞 速发展 , 各个领域都出现了适用于该 领域 的仿真 系统 , 充分利用计算机 软件 仿真 技术 来学 习和 开发 单 片机 系统 已是 大势 所趋 。本 文 基 于 Po u 软件构建 的单片机虚拟实验平台 ,将极 大地提 高单片机学 习和 rt s e 开发的效率 , 较好地解决单 片机实际教学中存在 的诸多问题。 2P oe s软 件 .rtu Po u 是英 国 L bet l t n s r es t a c e E c oi 公司研 发的多功能 E A软件 。 n r er c D 它不仅能仿真单片机 C U的工作情 况 , P 也能仿真单 片机外围 电路或没 有单片机参与的其它电路的工作情况 。它既是模拟 电路 、 数字 电路 、 模 数混合 电路设计与仿真平台 ,也是 目前最先进 的单片机与嵌入式系统 的 设 计 与 仿 真 平 台 。 它拥 有 开 关 、 钮 、 态 键 盘 、 E 按 动 L D与 L D 显 示 、 C R 一 3 终端等交互 的装置模 型; S22 具有示波器 、 逻辑分析仪 、 信号发生等 各种虚拟仪器 ; 设有 寄存 器和存 储器 , 断点和单步模式 等调试 工具 ; 集 编辑 、 编译及程序仿真于一体 , 支持众多不 同公 司的多款 M U处理器 , C 支持 P M、 L 汇编及 c语言 的程序设计 , 支持 I C S Y和 Ke V s n AR — P iu ii 2 l o 等开发工具的源层调试 。利用 Poes rt 软件可 以在 P u C上完成从原理 图 设计 、 电路仿真 、C P B设 计到软件代码调试 、 实时仿真 、 测试和验证 的整 个 开发 过 程 , 同 时 满 足初 学 者 与 单 片机 开发 人 员 的需 要 。 可 3虚 拟 实 验 平 台及 应 用 . 基 于 Poes rt 软件构建 的单片机虚拟实验平 台由 A 8 C 1 片机 u T 95 单 模块 、 位流水灯模块 、 8 8位数码管模块 、E L D灯模块 、C L D屏模块 、E LD 点阵屏模块 、 蜂呜器模块 、 步进 电机模块 、X 4 4矩阵按键模块 、 按键控制 模块、 开关模块等组成 ( 如图 1 所示 )简单易用且功能丰 富, , 如同购置 的单片机实验箱或实验开发板 。借助于 该实验平台初学者可完成单片 机课程 的仿 真 实验 ,教 师可 进行单 片机课 堂 的演示 实 验 。下 面 以 A 8C 1 T 9 5 设计 的经典流水灯为例介绍此平台的使用方法 。
实验一 KEIL软件的使用及P1口控制
实验一KEIL软件的使用及P1口控制一实验目的1、学习KEIL软件的使用方法及单片机实验平台2、学习P1口的控制方法3、学习延时子程序的编写和单片机延时计算方法二实验原理1、KEIL软件是德国Keil公司开发的基于Windows平台的单片机集成开发环境软件。
KEIL软件包括编译器、连接器、库管理器和仿真调试器,通过集成开发环境(μVision)将这些部分组合在一起。
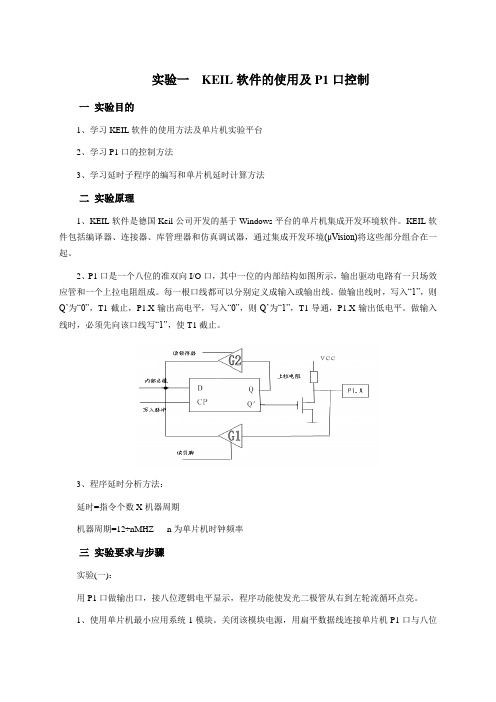
2、P1口是一个八位的准双向I/O口,其中一位的内部结构如图所示,输出驱动电路有一只场效应管和一个上拉电阻组成。
每一根口线都可以分别定义成输入或输出线。
做输出线时,写入“1”,则Q’为“0”,T1截止,P1.X输出高电平,写入“0”,则Q’为“1”,T1导通,P1.X输出低电平。
做输入线时,必须先向该口线写“1”,使T1截止。
3、程序延时分析方法:延时=指令个数X机器周期机器周期=12÷nMHZ n为单片机时钟频率三实验要求与步骤实验(一):用P1口做输出口,接八位逻辑电平显示,程序功能使发光二极管从右到左轮流循环点亮。
1、使用单片机最小应用系统1模块。
关闭该模块电源,用扁平数据线连接单片机P1口与八位逻辑电平显示模块。
(并口线与右侧的8个插孔是串联等效的。
)2、用串行数据通信线连接计算机与仿真器,把仿真器插到模块的锁紧插座中,请注意仿真器的方向:缺口朝上。
3、打开Keil uVision2仿真软件,首先建立本实验的项目文件,接着添加P1_A.ASM源程序,进行编译,直到编译无误。
4、进行软件设置,选择硬件仿真,选择串行口,设置波特率为38400。
5、(先接通仿真器电源再开启试验箱电源)打开模块电源和总电源,点击开始调试按钮,点击RUN按钮运行程序,观察发光二极管显示情况。
发光二极管单只从右到左轮流循环点亮。
注:软件具体操作见附录实验(二):用P1.0、P1.1作输入接两个置位开关,P1.2、P1.3作输出接两个发光二极管。
CCS4.1.2软件安装、使用与仿真器驱动配置
10 南京研旭电气科技有限公司 网站: 电话:86-025-58747116
YXDSP-F28335 用户指南
南京研旭电气科技有限公司
点击 Browser 加载 CRK 目录下的 full.lic,然后点击 OK,就会 出现下图所示:
南京研旭电气科技有限公司 网站: 电话:86-025-58747116
南京研旭电气科技有限公司 网站: 电话:86-025-58747116
17
YXDSP-F28335 用户指南
南京研旭电气科技有限公司
点击 Finish 后将出现一下配置界面:
18 南京研旭电气科技有限公司 网站: 电话:86-025-58747116
YXDSP-F28335 用户指南
南京研旭电气科技有限公司
选择如下图所示
点击 NEXT,选择如下:
南京研旭电气科技有限公司 网站: 电话:86-025-58747116
5
YXDSP-F28335 用户指南
南京研旭电气科技有限公司
一直点击 “Next”,全部选择默认安装。 出现下图安装进程界面
南京研旭电气科技有限公司 网站: 电话:86-025-58747116
19
YXDSP-F28335 用户指南
南京研旭电气科技有限公司
第四步:XDS100V2 仿真器配置如下图:
20 南京研旭电气科技有限公司 网站: 电话:86-025-58747116
16 南京研旭电气科技有限公司 网站: 电话:86-025-58747116
YXDSP-F28335 用户指南
4B4B4B
南京研旭电气科技有限公司
1.4 仿真器的配置 对目标进行配置,如下图所示:
仿真器识别后,在 CCS4 环境下,建立 NewTargetConfiguration;随 便起一个名字即可。
掌握WigglerJTAG仿真器的安装和使用能够在Magi三RM复习课程

广州致远电子有限公司
MagicARM2410教学实验开发平台
5.实验原理
当I/O设置为GPIO输出模式(Output模式)时,可以 通 过 写 GPxDAT 控 制 相 应 I/O 口 输 出 高 电 平 或 低 电 平 。 GPxDAT为1的位对应I/O输出高电平,为0的位对应I/O 输出低电平;
广州致远电子有限公司
MagicARM2410教学实验开发平台
4.实验预习要求
仔细阅读参考文献[2]第9节的S3C2410A的GPIO模块说 明; 仔 细 阅 读 <<… 实 验 指 导 >> 第 1 章 的 内 容 , 了 解 MagicARM2410实验箱的硬件结构,注意独立LED及蜂鸣器 控制电路; 仔细阅读<<…实验指导>>第2章或其它ADS相关资料, 了解ADS 1.2集成开发环境、DeviceARM2410专用工程模 板、Wiggler JTAG仿真器的应用。
广州致远电子有限公司
MagicARM2410教学实验开发平台
6.实验步骤
固化程序 (10) 仿真调试通过后,关闭AXD。在ADS 1.2集成开发 环境中选用Release生成目标,并设置生成LEDCON.hex 文件(或者LEDCON.bin文件),然后编译链接工程。 (11) 将启动方式选择跳线JP8断开,然后按RST键复位 系统。 (12) 使用Flash Programmer软件将LEDCON.hex烧写到 片 外 NOR FLASH , 或 者 使 用 WR_NORFlash 工 程 将 LEDCON.bin烧写到片外NOR FLASH。
BMS硬件在环仿真平台搭建方案
BMS硬件在环仿真平台搭建方案一、硬件在环测试概述现代汽车电控系统开发一般都采用虚实结合的开发流程。
其中硬件在环HIL (Hardware-in-Loop)仿真技术对纯电动汽车各控制系统的开发有着重要意义。
硬件在环技术,可以提高系统开发效率、降低系统开发难度与成本、提高开发质量、减少系统开发风险。
通过将系统中的关键硬件与复杂的仿真模型集成,可以并行开发系统软件、硬件,进行性能评估和各种测试。
包括系统极限测试和严酷环境测试等。
所以硬件在环技术已成为现代采用并行工程开发车辆控制系统不可缺少的一环。
作为一种虚实结合调试和验证控制单元的开发平台,硬件在环仿真系统首先应该包括一系列非常友好的用户界面以便用户设置参数来选择功能、显示结果和进行文档处理等等;其次作为一种系统控制平台应能合理地调度系统中存在的各种程序线程,从而提高硬件在环仿真系统的响应速度。
并且作为一种调试和验证硬件的系统控制平台,它还应具有驱动硬件接口卡的能力,根据对硬件在环仿真系统控制平台的要求和开发系统控制程序的难易程度。
二、硬件在环仿真平台搭建步骤硬件在环仿真环境针对用户的被测车型进行建模仿真,并将其运行于与控制器闭环工作的实时环境中,实现对各个电控单元的复杂测试。
这种测试手段的好处在于:将测试过程从试验台架中分离、模拟被控对象的各种工况、模拟复杂的故障模式、快速重现故障模式、实现多个控制器的集成测试、实现测试自动化、易于维护和扩展测试能力。
硬件在环仿真原理如图1所示,在传统测试中,BMS和真实被控对象(动力电池、实车)形成闭环系统进行控制;在硬件在环仿真测试中,BMS和仿真系统(硬件和软件)形成闭环系统进行控制。
由于硬件在环仿真系统使用了仿真模型替代真实的被控对象,因此仿真模型必须精确地提供仿真被控对象的性能,包括其输入、输出特性,响应特性等等。
使用硬件在环仿真的用户必须为仿真控制对象建立可运行的实时模型。
图1 硬件在环仿真原理现有的商业模型都提供了参数化的实时模型,用户只需要修改参数就可以完成大部分模型的设计工作。
基于ns2的wmsns可视化仿真平台的设计与实现
基于NS2的WMSNs可视化仿真平台的设计与实现摘要无线多媒体传感器网络(Wireless Multimedia Sensor Networks,WMSNs),在无线传感器网络基础上增加了大量的音、视频多媒体传感器设备,从而实现更加全面、准确、高效、细粒度的区域检测。
WMSNs技术已经较为广泛的应用于军事侦查、智能家庭、环境监测以及城市交通等领域。
对于网络场景的研究,尤其是大规模的网络场景很难通过实验来模拟,所以网络仿真工具的出现在很大程度上解决了这一难题。
由于WMSNs是较为新颖的网络形式,所以现阶段针对WMSNs的仿真工具相对较少。
本文提出了一种针对WMSNs的仿真工具的设计方案。
基于NS2的WMSNs可视化仿真平台是针对WMSNs的网络仿真平台。
本文主要工作分为两部分:服务器端和移动设备端。
服务器端以NS2为基础,负责仿真数据的处理工作;移动设备端以用户界面为主,负责仿真场景的搭建和描述以及仿真结果的呈现。
用户界面上可以设置无线节点以及节点坐标、节点无线信号覆盖范围、能量值、无线信道参数等针对WMSNs场景特征设置。
在NS2中加入了适用于WMSNs的经典的LEACH路由协议,拓展了NS2功能,使该平台更有针对性。
本仿真平台将仿真界面和仿真处理器分离,仿真界面置于移动终端,仿真处理器置于服务器。
只要将移动终端与服务器通过Wi-Fi连接,便可以随时随地对WMSNs场景进行仿真,并快速得到仿真结果,大大提高了仿真效率,为以后的工作节约了大量时间。
本文的主要创新点是针对WMSNs设计了基于NS2的仿真平台,同时在该平台上进行了LEACH路由协议仿真试验,试验结果表明该平台具有一定的应用价值,对WMSNs的仿真研究具有一定的理论价值和现实意义。
本设计已经获得了国家版权局颁发的计算机软件著作权登记证书(软件名称:基于NS2的WMSNs可视化仿真平台1.0,登记号:2013SR016727)。
关键词:WMSNs;NS2;网络场景;仿真平台Design and Implementation of Visual Simulation Platformfor WMSNs Based on NS2AbstractWireless multimedia sensor networks (WMSNs), increase a large number of audio and video multimedia sensor devices on the base of wireless sensor networks, in order to achieve more comprehensive, accurate, efficient, fine-grained region detection. The WMSNs have been widely used in the military investigation, smart home, environmental monitoring, as well as urban transportation and other fields.The study of network scenes, especially large-scale network scenarios are difficult to simulate by experiments, so network simulation tools can solve this problem. WMSNs are novel form of network, so simulation tools for WMSNs are relatively very few at the present stage. This paper presents a design of a simulation tool for WMSNs.Visual simulation platform for WMSNs based on NS2 is designed for WMSNs. This simulation platform can be divided into two parts: server-side and mobile device. Server-side is responsible for the processing of the simulation data; mobile device is responsible for the building and description of simulation scenes, as well as the presentation of simulation results. The user interface can set the wireless nodes, node coordinates, node wireless signal coverage, energy value, and radio channel parameters. Most importantly, we add LEACH routing protocol which is designed for WMSNs to expand NS2, makeing the platform more targeted.This simulation platform separates interface from simulation processor, and the interface is placed on the mobile device while the simulation processor is set to theserver. As long as connecting the mobile terminal and server via Wi-Fi, we can simulate wireless multimedia sensor network scenes anytime and anywhere and get the simulation results quickly. By this way, we greatly improve the simulation efficiency and save lots of time.The main innovation point of this paper is that we design a visual simulation platform for WMSNs based on NS2, and the platform has tested LEACH routing protocol. The results show that the platform has a certain value in theory and application for WMSNs. This design has obtained a registration certificate of computer software copyright issued by the National Copyright Administration (Software Name: Visual Simulation Platform for WMSNs Based on NS2 1.0, Registration Number: 2013SR016727).Keywords: WMSNs; NS2; Network Scenes; Simulation Platform目录1绪论 (1)1.1 研究背景与意义 (1)1.1.1 课题背景 (1)1.1.2 研究内容 (3)1.2 研究现状 (3)1.2.1 现有网络仿真器综述 (4)1.2.2 存在的问题 (5)1.3 本文的组织结构 (6)1.4 本章小结 (7)2 NS2仿真器 (8)2.1 NS2仿真器概述 (8)2.1.1 NS2使用的语言简介 (9)2.1.2 NS2的原理 (11)2.1.3 NS2中相关工具介绍 (13)2.2 NS2协议的扩展方法 (15)2.3 本章小结 (15)3 WMSNs (16)3.1 WMSNs概要 (16)3.1.1 无线多媒体网络体系结构 (16)3.1.2 WMSNs分层结构及协议 (20)3.2 WMSNs研究的热点问题 (23)3.2.1 ZigBee技术 (23)3.2.2 超宽带技术 (24)3.2.3 跨层优化 (24)3.2.4 多媒体编解码 (25)3.2.5 服务质量保障 (25)3.2.6 网络覆盖 (25)3.3 WMSNs的应用 (26)3.4 本章小结 (27)4 基于NS2的WMSNs可视化仿真平台设计 (28)4.1 仿真平台架构 (28)4.1.1 服务器主要功能 (30)4.1.2 移动终端主要功能 (31)4.2 仿真平台工作流程 (33)4.2.1 服务器端各功能函数说明及实现 (35)4.2.2 移动设备端各功能函数说明及实现 (37)4.3 LEACH协议 (39)4.3.1 LEACH路由协议简介 (39)4.3.2 NS2中协议拓展方法与实现 (39)4.3.3 NS2中路由协议的添加 (40)4.3.4 LEACH路由协议的C++实现过程 (41)4.4 本章小结 (43)5 基于NS2的WMSNs可视化仿真平台的使用 (44)5.1 仿真平台的安装 (44)5.1.1 运行环境要求 (44)5.1.2 Cygwin安装 (45)5.1.3 NS2安装 (47)5.1.4 LEACH协议添加 (49)5.1.5 仿真平台其它配置 (50)5.2 服务器端登录和退出 (50)5.2.1 服务器登录 (50)5.2.2 服务器退出 (51)5.3 移动设备端应用界面 (52)5.3.1 功能按钮 (52)5.3.2 无线节点传输层协议设置 (52)5.3.3 无线节点应用层协议设置 (53)5.3.4 无线节点路由协议设置 (53)5.3.5 无线节点其它参数设置 (54)5.3.6 脚本生成 (54)5.4 仿真结果分析 (55)5.4.1 仿真环境设置 (55)5.4.2 仿真结果分析 (56)5.5 本章小结 (57)6 总结与展望 (58)参考文献 (60)致谢 (64)个人简历、在学期间研究成果 (66)1绪论1.1 研究背景与意义1.1.1 课题背景21世纪,已经进入了信息通信时代,各种无线技术、电子技术和传感器技术都得到了飞速发展。
基于半实物仿真的风力发电实验教学平台
第37卷第3期贵州大学学报(自然科学版)Vol.37㊀No.32020年㊀5月JournalofGuizhouUniversity(NaturalSciences)May2020收稿日期:2019 ̄11 ̄16基金项目:国家自然科学基金项目资助(51567005)作者简介:潘春鹏(1996 ̄)ꎬ男ꎬ在读硕士ꎬ研究方向:配电网自动化和智能电网ꎬEmail:2777853818@qq.com.∗通讯作者:郝正航ꎬEmail:haozhenghang@163.com.文章编号㊀1000 ̄5269(2020)03 ̄0053 ̄05DOI:10.15958/j.cnki.gdxbzrb.2020.03.10基于半实物仿真的风力发电实验教学平台潘春鹏ꎬ郝正航∗(贵州大学电气工程学院ꎬ贵州贵阳550025)摘㊀要:针对传统的风力发电教学实验平台功能单一㊁难以完全满足新工科建设对学生多维能力培养需求的现状ꎬ基于半实物仿真技术ꎬ设计了一种产学研一体化的风力发电控制装置研发及教学实验平台ꎮ以OBE(基于学习产出的教育模式ꎬOutcomes ̄BasedEducation)理念为指导ꎬ依托贵州大学通用实时仿真平台ꎬ以培养科学素养高㊁创新能力强㊁实践能力强的三位一体的复合型高级工程技术人才为目标ꎬ参考企业实际产品研发测试流程ꎬ通过采用先进的实时仿真技术ꎬ构建了适用于新工科建设的新一代实验教学平台ꎬ探索了产学研一体化的新工科人才培养路径ꎮ关键词:风力发电ꎻ硬件在环ꎻ产学研一体化ꎻ新工科中图分类号:TM614ꎻG642.423㊀㊀㊀文献标识码:A㊀㊀风能是一种清洁的可再生能源ꎬ风力发电是风能利用的主要形式[1]ꎮ一个完整的风力发电系统涉及的专业知识包括电机学㊁电力电子技术㊁自动控制㊁电力拖动等ꎬ而这些知识对应的是电气工程及其自动化专业的重要专业课ꎮ因此ꎬ有必要把风力发电系统作为该专业创新综合应用类课程的实验教学实例[2]ꎮ传统实物风力发电教学实验平台功能单一ꎬ多依托于固定的实物拓扑ꎬ以操作演示为主ꎬ缺乏创新性与拓展性ꎻ而纯数字仿真平台可以实现对控制算法的研究ꎬ却难以培养学生动手实践的能力ꎮ为了实现学生创新㊁实践与科研多维能力的全面发展ꎬ高校自行研制基于半实物仿真技术的新型实验教学平台ꎬ已成为当前风力发电实验平台建设与探索的热点ꎮ1㊀风力发电实验教学平台建设现状目前国内外对风力发电实验教学平台建设进行了很多的探索ꎬ但大多是实物实验平台或纯数字仿真实验平台ꎮ文献[3]中建设了以小型永磁同步发电系统和LabVIEW监控系统组成的风力发电实验平台ꎬ可以实现完整风力发电过程的演示ꎬ帮助学生对风力发电建立直观的概念ꎻ文献[4]中通过对实际运行大型风力机进行实时数据的采集ꎬ配合3D动画技术ꎬ建立了一个交互式风力学习实验平台ꎬ形象地展示了风力发电的过程ꎬ让学生学习过程充满趣味性ꎻ文献[5]中建设了以可编程逻辑控制器(ProgrammableLogicControllerꎬPLC)㊁电机㊁风机和蓄电池组成的小型风力实验平台ꎬ学生通过调节风速按钮ꎬ可以观察风力发电功率曲线的变化ꎬ较为形象地展示了风力发电的实际情况ꎮ以上3种风力教学实验平台功能都比较单一ꎬ主要以操作演示为主ꎮ学生只能对风力发电的整体过程大致了解ꎬ对少部分原理进行简单验证ꎬ学生参与度低ꎮ文献[6]中基于德国Lucas ̄nuelle公司的双馈风力发电教学实验平台ꎬ设计了一些典型实验ꎬ通过软硬件结合模拟风机运行ꎬ结合计算机辅助测量控制ꎬ帮助学生形象理解各种晦涩的理论知识ꎮ通过风速模拟㊁风力机控制㊁双馈风力发电并网㊁双馈风力发电功率控制与双馈风力发电低电压穿越等实验操作过程ꎬ加深了学生对课堂知识的理解ꎮ但由于是采用现成的实物实验平台ꎬ控制器对学生是不开放的ꎬ学生无法研究与运用最新的控制技术ꎬ实验过程缺乏创新性与拓展性ꎮ贵州大学学报(自然科学版)第37卷文献[7]中以MATLAB软件为基础ꎬ采用模块化思想ꎬ设计了一种风力发电仿真平台ꎻ文献[8]中基于MATLAB与LabVIEW设计了一个风力发电虚拟实验教学平台ꎬ突破了实验环境㊁场地㊁仪器设备等条件的限制ꎬ教学内容丰富形象且成本低ꎮ虽然纯软件仿真能够帮助学生学习和验证控制理论与算法ꎬ但较难培养学生的实际动手能力ꎬ学生对实际的控制器也很难有直观的认识ꎮ总的来说ꎬ传统的实物和纯数字仿真风力发电实验平台较难满足新工科建设下对学生科研能力㊁创新能力与实践能力培养的要求[9 ̄12]ꎮ因此ꎬ本文面向新工科建设内涵要求[13]ꎬ对风力发电实验平台进行了探索ꎬ研制了一种基于半实物仿真技术的实践教学平台ꎮ2㊀建模方案2.1㊀实验平台基础架构实验平台基础架构采用通用实时仿真器(Uni ̄versalReal ̄timeExperimentalPlatformꎬUREP)ꎮUREP是自主研发的基于模型化的工程设计应用平台ꎬ其基础构架如图1所示ꎮUREP包括主控计算机和实时仿真目标机:主控计算机用于离线建模和实时监控㊁在线调参ꎻ实时仿真目标机用于运行实时模型ꎬ并与外部设备接口形成半实物闭环系统ꎮ目标机包含多核处理器仿真主板㊁高速通信单元㊁智能I/O接口单元㊁协调优化硬件解算器和实时操作系统ꎬ是实验平台的核心部分ꎮ利用MAT ̄LAB/Simulink建立动态系统数学模型ꎬ经代码转换为C代码后ꎬ编译下载到实时仿真器内运行ꎬ可以进行实时数字仿真㊁半实物仿真及控制㊁测量与系统控制等ꎮUREP具有快速控制原型(RapidCon ̄trolPrototypingꎬRCP)㊁功率级快速控制原型(Pow ̄erRapidControlPrototypingꎬPRCP)㊁硬件在环(HardwareIntheLoopꎬHIL)和功率级硬件在环(PowerHardwareIntheLoopꎬPHIL)等4项基本功能ꎬ仿真步长最短可达30μsꎬ完全能够满足风力发电仿真与控制装置研发一体化实验平台建设的基本需求[14]ꎮ2.2㊀实验平台的层次化设计实验平台采用层次化设计思想ꎬ如图2所示ꎬ分为离线仿真㊁实时仿真和半实物仿真等3个层次ꎮ第一层次为离线仿真ꎬ是指在PC端实现功率主系统以及控制算法的建模ꎬ并进行离线仿真ꎮ该图1㊀实验平台的基础架构Fig.1㊀Infrastructureofexperimentalplatform层的主要功能是验证风力发电系统的整体方案是否可行ꎮ第二层次是全数字实时仿真ꎬ是指将离线模型实时化后导入UREP实时运行ꎮ功率主系统和控制器两部分的模型分别搭建为硬件在环(HIL)子系统和快速控制原型(RCP)子系统ꎮHIL和RCP均在UREP中运行ꎬ二者交换的信号通过UREP的输入输出端口实现连接ꎮ该层的主要功能是通过长时间运行(如几小时至几天甚至更长)ꎬ验证数字系统的稳定性和可靠性ꎮ这是第一层次无法完成的ꎮ第三层次是半实物仿真ꎬ是指将RCP子系统模型通过Simulink代码自动生成技术导入嵌入式开发平台(STX ̄N39)ꎬ使RCP转变为实际控制器ꎬ并对主系统进行控制ꎬ验证控制算法在实际控制中的性能ꎬ可以消除在实际控制中存在的缺陷ꎬ并测试极端情况㊁故障情况下控制器的功能是否完善ꎮ该层的主要功能是培养学生基于嵌入式平台开发实际控制器的能力ꎬ是半实物仿真平台的最终目标ꎮ2.3㊀半实物仿真实验平台的组成实验室现场的半实物仿真实验平台如图3所示ꎬ由UREP㊁PC上位机㊁嵌入式开发平台(N39控制器)㊁机柜等设备组成ꎮ相对于传统操作演示型45第3期潘春鹏等:基于半实物仿真的风力发电实验教学平台图2㊀实验平台的3个层次Fig.2㊀Threelevelsofexperimentalplatform的实物风力教学实验平台ꎬ基于半实物实时仿真技术的实验平台ꎬ控制器对学生不再是一个黑匣子ꎬ学生可以对各种先进的控制算法进行研究与运用ꎬ实验过程更具有创新性与拓展性ꎮ相对于传统纯数字风力发电仿真实验平台ꎬ利用半实物实时仿真技术ꎬ将控制器硬件纳入到仿真回路中进行测试ꎬ其仿真效果更趋近真实情况ꎬ仿真结果更具说服力ꎮ并且通过对实际控制器的研发与测试ꎬ学生可以真正地接触真实的硬件ꎬ学习从理论算法到实际控制设备运行代码的转换过程ꎬ自己动手联合软硬件进行调试ꎬ大大提高了学生实验的参与度ꎮ图3㊀半实物仿真实验平台Fig.3㊀HILsimulationexperimentplatform3㊀风力发电项目实验流程设计项目式风力发电控制装置研发的实验实践教学主要分为3个阶段:控制器研发的理论基础的学习与贯通阶段ꎬ控制算法快速验证与创新阶段和实物控制器验证与实践能力提升阶段ꎮ3.1㊀控制器研发的基础理论验证本阶段主要通过风力发电系统的Simulink仿真模型搭建(图4)ꎬ对风力发电的过程形成整体的认识ꎬ融会贯通风力发电相关的基础理论知识ꎮ如图4所示ꎬ实验主要包括:风轮机模型搭建实验ꎬ风力发电机侧与网侧变流器控制实验ꎬ风力发电最大功率追踪实验ꎬ风力发电并网控制实验ꎬLVRT电压跌落测试实验ꎮ图4㊀Simulink离线仿真模型搭建Fig.4㊀ThebuildingofofflineSimulinksimulationmodel55贵州大学学报(自然科学版)第37卷3.2㊀控制算法快速验证与创新阶段风电系统的控制器主要通过嵌入式硬件进行开发ꎬ底层代码大都比较复杂ꎬ对于编程基础薄弱的电气工程专业学生很难快速适应ꎮ为此研制了具有代码快速转化㊁调试简单的RCP快速原型控制器ꎬ大大提高控制器开发的效率ꎮ如图5所示ꎬ将第一阶段搭建的控制算法模型与功率主电路模型分别导入RCP与UREP中运行ꎬ进行RCP+HIL半实物仿真闭环测试实验ꎬ利用先进的半实物仿真技术快速验证所搭建的控制算法的有效性ꎮ然后学生根据自己想法对控制算法进行优化ꎬ不断试错ꎬ不断验证ꎬ快速地对控制算法进行创新ꎮ图5㊀RCP+HIL两个半实物仿真闭环测试Fig.5㊀TwoclosedlooptestsofRCP+HIL3.3㊀实物控制器验证如图6所示ꎬ首先在STX ̄N39控制器中刷入Ubuntu系统ꎬ然后利用Simulink代码自动生成技术将控制算法模型转化为C代码ꎬ并将代码移植到控制器中ꎬ同时也需要学会电压电流数据如何采集㊁PWM脉冲如何产生等硬件知识ꎮ最后将实际的控制器与实时仿真器连接ꎬ对控制器进行硬件在环实时仿真测试ꎬ真正地实现了产学研一体化ꎮ图6㊀实际控制器的硬件在环测试Fig.6㊀Hardwareinthelooptestoftherealcontroller㊀㊀LVRT电压跌落测试:电压跌落时ꎬ永磁直驱风电机组的主要问题是输出功率不平衡引起的直流母线电压上升ꎬ可通过储存或消耗多余能量的方法ꎬ解决功率平衡问题ꎬ抑制冲击压[15]ꎮ采用Chopper电路实现LVRTꎬ对直流电压进行监测ꎮ当直流电压超过限值2000V时ꎬ触发Chopper中的IGBTꎬ泄放直流母线的能量ꎮ初始风速为0ꎬ在0.01s跳变到8m/sꎻ0.2s交流断路器合闸ꎬ开始并网运行ꎻ0.3s风速跳变到12m/sꎻ0.5s交流电压跌落到0.2puꎬ持续625msꎻ1.5s仿真结束ꎮ如图7所示ꎬ0.2s前ꎬ断路器两侧电压Vabc_g与Vabc_g1已基本重合ꎬ此时合闸ꎬ由图8看到其冲击电流很小ꎮ图7㊀断路器两侧电压Fig.7㊀Voltageonbothsidesofthecircuitbreaker图8㊀电网侧电流Fig.8㊀Gridsidecurrent㊀㊀如图9所示ꎬ0.5s交流电压跌落时ꎬ直流母线电压急剧上升ꎬ此时Chopper电路被触发ꎬ将Vdc限制在2000V左右ꎬ并且可持续625ms运行ꎬ满足LVRT测试标准ꎮ图9㊀直流母线电压Fig.9㊀DCbusvoltage65第3期潘春鹏等:基于半实物仿真的风力发电实验教学平台4㊀结语依托自主研发的UREP构建了新型风力发电实验平台ꎬ将教学 ̄科研 ̄装置研发有机结合起来ꎮ通过项目式学习ꎬ让学生学会利用全局工程意识来统筹多门学科的知识ꎬ学习重心由课本知识转移到了个人能力ꎮ通过实际装置的研发ꎬ让学生了解了企业电力系统自动化装备的开发流程ꎬ实现了由知识传授向企业所需的职业能力过渡ꎮ参考文献:[1]李振东.直驱永磁同步风力发电实验系统的构建与实验[J].实验室研究与探索ꎬ2012ꎬ31(12):47 ̄49.[2]郝雯娟ꎬ张祺.教学用风力发电系统虚拟实验台的设计与实现[J].实验技术与管理ꎬ2016ꎬ33(2):97 ̄99.[3]严干贵ꎬ于文杰ꎬ戴武昌ꎬ等.永磁风力发电教学实验平台的研制[J].东北电力大学学报ꎬ2009ꎬ29(4):67 ̄71. [4]BUSHJꎬKANEMꎬSEGRUDKꎬetal.Aninteractiveapproachtorenewableenergyresearchandeducation[C]//2011FrontiersinEducationConferenceꎬRapidCityꎬSDꎬUSA.PiscatawayꎬNJꎬUSA:IEEEPressꎬ2011:S3F ̄1 ̄S3F ̄5.[5]张儒ꎬ陈志军.风力发电模拟实验装置设计[J].自动化仪表ꎬ2011ꎬ32(9):35 ̄37.[6]梅柏杉ꎬ吴迪ꎬ冯江波.双馈风电实验平台在实践教学中的应用研究[J].实验技术与管理ꎬ2015ꎬ32(5):101 ̄103ꎬ106.[7]王鹏ꎬ王武ꎬ张元敏.风力发电仿真实验平台开发及应用[J].实验技术与管理ꎬ2012ꎬ29(4):81 ̄83.[8]HAOWꎬLIUHꎬWANGYꎬetal.ThedesignandsimulationofateachingvirtualplatformbycombiningLabVIEWandSimulinkforundergraduatesofelectricalengineering[C]//201720thInterna ̄tionalConferenceonElectricalMachinesandSystemsꎬSyndeyꎬNAWꎬAustralia.PiscatawayꎬNJꎬUSA:IEEEPressꎬ2017:1 ̄4. [9]姚春光ꎬ潘卫明ꎬ徐殿国ꎬ等.基于鼠笼式异步电机的风机模拟实验平台研究[J].电力电子技术ꎬ2010ꎬ44(6):23 ̄25. [10]程俊杰ꎬ郑晓丹ꎬ凌松盛ꎬ等.风力发电综合实验系统研制与应用[J].实验技术与管理ꎬ2012ꎬ29(11):74 ̄77ꎬ86.[11]李振东.直驱永磁同步风力发电实验系统的构建与实验[J].实验室研究与探索ꎬ2012ꎬ31(12):47 ̄49ꎬ107.[12]陈明亮ꎬ袁雷ꎬ肖飞ꎬ等.兆瓦级永磁直驱风力发电模拟实验系统设计[J].电力系统自动化ꎬ2015ꎬ39(15):132 ̄136. [13]张爱华ꎬ于忠党ꎬ张志强.创新教育与专业教育深度融合的教学模式研究与实践 以«模拟电子技术»为例[J].渤海大学学报(自然科学版)ꎬ2019ꎬ40(2):167 ̄173.[14]黄绍书ꎬ郝正航ꎬ余敏ꎬ等.基于通用实时仿真平台的电流保护仿真研究[J].贵州大学学报(自然科学版)ꎬ2018ꎬ35(3):76 ̄80.[15]CHADAꎬGZAJ.Supercapacitorenergystorageforwindenergyapplications[J].IEEETransactionsonIndustryApplicationsꎬ2007ꎬ43(3):769 ̄776.(责任编辑:曾㊀晶)WindPowerExperimentTeachingPlatformBasedonHardware ̄in ̄the ̄loopSimulationPANChunpengꎬHAOZhenghang∗(CollegeofElectricalEngineeringꎬGuizhouUniversityꎬGuiyang550025ꎬChina)Abstract:Thefunctionoftraditionalwindpowerexperimentteachingplatformissingleꎬsoitcouldnotfullymeettheneedsofdevelopingstudents'multi ̄dimensionalabilityintheconstructionofemergingengineeringeducation.Thisresearchandteachingexperimentplatformwasdesigned.Basedonthehardware ̄in ̄the ̄loopsimulationtech ̄nologythatappliedawind ̄powercontroldeviceintegratingindustryꎬeducationandresearch.Guidedbythecon ̄ceptofOBEꎬitwassupportedbytheUniversalReal ̄timeExperimentalPlatformofGuizhouUniversityꎬaimingattraininghigh ̄levelengineeringandtechnicalpersonnelwithstrongscientificꎬinnovativeandpracticalability.ThenewexperimentalteachingplatformwasconstructedaccordingtotherealproductR&Dandtestingprocessofen ̄terprisesbyusingadvancedreal ̄timesimulationtechnologyꎬexploringanewtrainingpathofengineeringtalentsintheintegrationofindustryꎬeducationandresearch.Keywords:windpowergenerationꎻHILꎻintegrationofindustryꎬeducationandresearchꎻemergingengineeringeducation75。
试验一CCS操作试验-机械与材料工程学院-西安文理学院
DSP器件及应用实验指导手册西安文理学院机械电子工程系目录实验一 CCS 操作实验 (2)实验二存储器实验 (5)实验三发光二极管循环点亮实验 (10)实验四数码显示实验 (12)实验五硬件中断实验 (14)实验六液晶显示实验 (16)实验七定时器实验 (18)实验八步进电机控制实验 (20)实验九用DSP芯片生成正弦信号发生器 (23)附录:数据流程图及端口地址 (24)实验一 CCS 操作实验一、实验目的1、熟悉CCS2.0软件的使用。
2、了解SZ-DSPF开发教学平台的使用。
二、实验设备计算机、DSP硬件仿真器、SZ-DSPF开发教学平台。
三、实验原理了解怎样连接DSP仿真器、对CCS的仿真配置及怎样在CCS内新建工程并生成*.out文件。
四、实验步骤安装CCS2.0的Simulator方式:双击桌面上的Setup CCS2(…C5000)图标,关闭Import Configuration窗口,在System Configuration中的My System的下面可看到一个类似板卡的图标,如果该图标的名称是“tisim54x”的话,就可直接关闭该窗口,不存盘退出。
如果该图标的名称不是“tisim54x”的话,在该图标上单击右键,选择remove 删除该结构,然后在Available Board Types中双击“tisim54x”的图标(如果有的话),弹出Board Properties的对话框点击“next”、“finish”然后关闭Code Composer Setup窗口,存盘退出即可。
如果在Available Board Types中没有“tisim54x”的图标,则在右边框内单击“Install a Device Driver”,在路径“c:\ti\driver\”(此目录为CCS的安装目录)中打开tisim54x.dvr 文件,在Available Board Types中可看到“tisim54x”的图标,然后按上述操作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
仿真器及实验平台的使用
一.实验目的:
1.了解仿真实验系统的基本构成。
2.了解仿真软件的功能特点及使用方法。
3.通过实验了解MCS51内部寄存器的分布及使用方法
二、实验设备
1.仿真器
2.模拟实验平台
3.Keil软件
4.微机
三、实验内容
1.BANK0——BANK3的分布及使用。
2.位寻址区的分布和使用。
3.内部RAM的分布和使用(包括直接及间接寻址)。
4.特殊功能寄存器(SFR)及其地址的对应关系。
四、调试方法
1.开启系统电源,并启动仿真软件Keil51。
2.在编辑状态下输入程序并存盘,
3.编译源程序,若出错则修改后重新编译,直至完全正确。
4.运行程序,(可采用单步(包括跟踪式和通过式)、断点、全速等多种方式)。
5.打开内部数据窗,观察程序执行过程中各对应单元的数据变化。
四、参考程序
ORG 0000H
AJMP MAIN
ORG 0030H
MAIN: MOV SP, #80H ;BANK0——BANK3的分布及使用。
MOV A, #0 ;BANK0
ACALL BK
SETB PSW.3
ACALL BK ;BANK1
CLR PSW.3
SETB PSW.4
ACALL BK ;BANK2
SETB PSW.3
ACALL BK ;BANK3
SETB 00H ;位寻址区的分布和使用;
SETB 10H
SETB 20H
SETB 30H
SETB 40H
SETB 50H
SETB 60H
SETB 70H
CLR 00H
CLR 10H
CLR 20H
CLR 30H
CLR 40H
CLR 50H
CLR 60H
CLR 70H
MOV 21H, #55H ; 内部RAM的分布和使用
MOV 27H,, #0AAH
MOV 2BH, #77H
MOV 2FH, #0FFH
MOV 30H, #45H
MOV 37H, #56H
MOV 3DH, #45
MOV 45H, #56
MOV 55H, #55H
MOV 66H, #66H
MOV 77H, #77
MOV R0, #90H ;间接寻址
MOV @R0, #90
MOV A, #66H
MOV R0,#0C0H
MOV @R0, A
MOV R1, #0A0H
MOV @R1, 90H
MOV R1, #0FFH
MOV @R1, #0FFH
MOV TH0, #05H ; 特殊功能寄存器(SFR)及其地址的对应关系
MOV TL0,#90H
MOV P1.#55H
MOV R7, #255 ; 外部RAM 写数据
MOV A, #0
MOV DPTR,#07FFFH
SS1: INC DPTR
INC A
MOVX @DPTR, A
DJNZ R7,SS1
S1: SJMP $
BK: MOV R0, A ;置数子程序
INC A
MOV R1, A
INC A
MOV R2, A
INC A
MOV R3, A
INC A
MOV R4, A
INC A
MOV R5, A
INC A
MOV R6, A
INC A
MOV R7, A
RET
END
五、实验过程
1、新建一个project,并将程序写入转换为.asm格式文件
2、将.asm文件程序导入,
3、进行调试与改错
4.检验程序无错并且运行
六、实验心得体会
通过本节课对单片机实验的学习,叫我更加了解了了单片机模型的运行过程与基础,原本只是在课堂上听老师讲解纯理论的东西,实在是听的叫自己云里雾里的感觉,根本就不明白单片机整个的运行过程和程序编写需要注意的一些问题,但是经过实践的过程,实验室的老师非常详细的讲解了整个仿真平台的运作过程和模拟单片机的运行过程,叫我感到了从未有过的明了,或者在一些的问题上我还是不够清晰的明白单片机的操作以及程序编写的各个步骤上的相互关系,但是现在有了一个好的开始,为日后学习单片机的运用的打下点基础。
单片机实验报告
——仿真器及实验平台的使用
学院:机自学院
学号:10121660
姓名:李晓龙
日期:2012年9月29日星期六。