基于TDOA系统的高精度软时钟同步方法
基于TDOA的Taylor算法在UWB定位系统中的应用

20 0 8年 第 3期 ( 第5 总 1期 )
桂林 航 天工 业 高等 专科学 校 学报
J U N LO UII O L G FA R S A ET C N L G 信 息 与 电子 工 程 O R A FG LNC L E EO E O P C E H O O Y
站 间 有 线 连 接 而 获 得 时 钟 同 步 。TD A 测 量 是 定 位 的 一 0
R 一 c 一 R 一 R 一 v d 。 厂 =
二 『 二
一
/ , 项 关 键 技 术 , 通过 检 测 信 号 到 达 不 同 基 站 的 时 间差 对 信  ̄ 它
号 源 进 行 位 置 估 计 。 因此 , 确 估 计 信 号 到 达 不 同基 站 的 准
以得 到标 签 的估 计 位 置 。
r — △
LI _ z J‘ y
RM — RM+ R1 I
根 据 T (A 测 量值 得 到 的 定 位 方 程 组 具 有 非 线 性 特 D) 点 , 常需 要 先 将 其 转 化 为 线 性 方 程 组 之 后 进 行 求 解 。 通 F n E 给 出 了 当 非 线 性 方 程 个 数 等 于 未 知 定 位 坐 标 数 时 ag3 ]
O 超 宽带 UW B ( tawd b n ) 术 起 源 于 2 Ul — ie ad 技 r O世 纪 6 给 出 了 定 位 方 程 组 的 非 迭 代 闭 式 解 ,在 TD A 测 量 误 差 O
年代 , 曾广泛用于雷达 和遥感领 域。随着无 线通信 的 飞速 比较 小 时 , 有 最 优 估 计 性 能 , 随 着 T OA 测 量 误 差 的 具 但 D
勒级数展开算法在 I R—UW B定 位 系 统 中 是 一 种 有 效 的定 位 算 法 。
一种改进的基于TDOA的三维多点定位技术

参考文献:
[1]马芝,云计算在IC设计中的应用,电子产品世界, (2011.8),P32-33,45
[2]云计算技术发展及应用探讨[R/OL].(2010-6-10) ,http://www.
作者简介:徐君怡(1978-),男,浙江嘉兴人,本科,北京工商 大学,信息主管,助理工程师,苏州华芯微电子股份有限公司,研究方 向:计算机应用及网络
[1] 吕小平, MDS技术在我国民用航空的应用探讨[J].空中交通管理, 2006, 23(9): 4-11
[2] 王洪, 刘昌忠等. 一种多点定位的目标位置精确解算方法. 航空 学报, 2011, Vol.32 No.7 1269-1274.
[3] 易云清, 徐汉林. 时差定位模型与定位精度分析. 电子对抗技术. 2010(3): 0016-05
仿真2:在保证改进的“矩阵伪逆-泰勒展开”的GDOP误差小于 “泰勒展开”的GDOP误差的情况下,对两种算法的迭代次数随着收 敛门限 的变化规律进行仿真。对于每一个点每次仿真运行3000次,并 求平均的迭代次数。运行的结果如图3所示,相比于“泰勒展开”, “矩阵伪逆-泰勒展开”在迭代次数的减少上取得了不错的性能提 高。因为泰勒展开的初始点并不是随机的,而是一个接近目标位置的
166
[7] Chan Y T, Ho L C. A simple and efficient estimator for hyperbolic location[J]. IEEE Transaction on Signal Processing, 1994, 42(8): 1905-1915.
RFID定位技术研究
GPS定位系统在进行室内定位时存在固有的定位精度问题,所以必须通过其他定位技术解决室内定位问题,如红外线、802.1l、超声波和RFID等等,这些系统各有优缺点。
其中RFID技术由于其非接触和非视距等优点已成为优选的定位技术,RFID系统可以在几毫秒内得到厘米级定位精度的信息,其传输范围很大,成本较低,因此备受关注。
RFID定位与跟踪系统主要利用电子标签对物体的唯一标识特性,依据读写器与安装在物体上的标签之间射频通信的信号强度(RSSI)或信号到达时间差(TDOA)来测量物品的空间位置,主要应用于GPS系统难以奏效的室内定位领域。
1.基于测距的RFID定位算法1.1 TOA1)原理: 通过获得发射机发射的信号到达目标再返回发射机的时间,由传播时间得出标签到阅读器的距离。
然后根据三边定位法或多边定位法解出目标标签的位置。
2)优点:定位精度高。
缺点:该算法要求标签和阅读器要同步,其次环境的复杂性会导致多径效应并降低系统的定位精度。
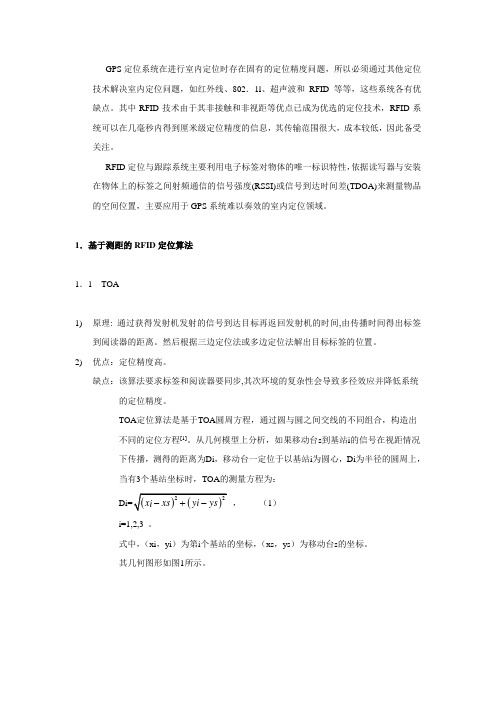
TOA定位算法是基于TOA圆周方程,通过圆与圆之间交线的不同组合,构造出不同的定位方程[1]。
从几何模型上分析,如果移动台s到基站i的信号在视距情况下传播,测得的距离为Di,移动台一定位于以基站i为圆心,Di为半径的圆周上,当有3个基站坐标时,TOA的测量方程为:,(1)i=1,2,3 。
式中,(xi,yi)为第i个基站的坐标,(xs,ys)为移动台s的坐标。
其几何图形如图1所示。
由(1)式得, ()()22111D x xs y ys =-+- (2) ()()22222D x xs y ys =-+- (3) ()()22333D x xs y ys =-+- (4) 由(2)-(3)可得相交线方程为,()()()()212112*22*21*11*11*12*22x x xs y y ys x x y y x x y y D D D D -+-=+-++-⎡⎤⎣⎦ (5) 同理,基站2基站3两圆交点的相交线方程为:()()()()323213*33*32*22*22*23*32x x xs y y ysx x y y x x y y D D D D -+-=+-++-⎡⎤⎣⎦ (6) 虽然可以用相同的方法得到基站1和基站3的相交线方程,但由于第3条交线同样会经过前2条交线的相同点,因此,只需求得3条交线其中2条的方程,便可联立解出交点坐标。
5G NR定位技术及其部署方案

5G NR定位技术及其部署方案作者:张诗壮李俊强陈诗军来源:《中兴通讯技术》2021年第02期摘要:提出了5G新空口(NR)在不同场景下的定位网络部署方案和定位技术部署方案。
其中,定位网络部署包括基于核心网部署的架构和基于本地计算部署的架构。
5G不同场景下的定位技术部署包括室外单站的往返时间(RTT)+到达角(AOA)方案部署、室外多站的RTT方案部署、室內室分环境的上行信号到达时间差(UL-TDOA)部署,以及室内室分+融合定位的QCell+X无线定位等。
这些技术和方案能为5G时代的定位部署带来重要参考价值。
关键词:5G;定位技术;部署方案Abstract: The location network deployment scheme and positioning technology deployment of 5G new radio (NR) in different scenarios are put forward. Positioning network deployment includes the overall architecture of core network and local deployment. 5G positioning technology deployment in different scenarios includes outdoor single station round trip time (RTT) + angle of arrival (AOA) scheme deployment, outdoor multi-RTT scheme deployment, indoor distributed environment up-link time difference of arrival(UL-TDOA) deployment, indoor distributed + integrated positioning Qcell + X wireless positioning. These technologies and solutions can bring great reference value for the positioning development in 5G era.Keywords: 5G; positioning technology; deployment scheme1 5G定位特点在信息社会中,对位置的精确描述已经成为各行各业的基本要求。
UWB的三种算法详解

超宽带UWB定位的三种常用定位算法,包括TDOA定位算法、TOF定位算法、TOA定位算法。
(一)TOF定位算法基于TOF的定位方法与基于TOA的定位方法在本质上是相同的,而TOF测距不依赖基站与标签的时间同步,故没有时钟同步偏差带来的误差,但TOF测距方法的时间取决于时钟精度,时钟偏移会带来误差。
为了减少时钟偏移量造成的测距误差,通常采用正反两个方向的测量方法,即远端基站发送测距信息,标签接收测距信息并回复,然后再由标签发起测距信息,远端基站回复,通过求取飞行时间平均值,减少两者之间的时间偏移,从而提高测距精度。
(二)TDOA定位算法基于TDOA的定位方法又称为双曲线定位,其原理是通过测量UWB信号从UWB标签到两个UWB基站之间传播时间的差值,得到UWB标签到两个UWB基站之间的固定距离差。
TDOA算法是对TOA算法的改进,它并不是直接利用信号到达时间,而是利用多个UWB基站接收到信号的时间差来确定移动目标的位置。
因此与TOA相比并不需要加入专门的时间戳来进行时钟同步,定位精度相对有所提高。
(三)TOA定位算法TOA定位算法即“到达时间”,这种方式定位是通过UWB基站和UWB标签之间的多次通信实现的,实际应用中为了更加靠谱,往往不仅仅是利用两次通信来测距,还会有更加复杂的多次通信来提高精度。
对于空间定位,只需要利用SX(球面相交法)便可以得出最后的坐标。
可见,为了一次定位,每个UWB基站和UWB标签之间要进行两次通信,故又将这种定位方式称为“Two-way-ranging”,简称“TWR”。
这种定位的优势在于其实现的便捷性和对硬件的宽容,只需要有几个摆放在不同位置的UWB基站和一个UWB标签便可进行定位,缺点首先自然是定位速度了,其次,由于每次通信的质量无法保证,而一对UWB基站/UWB标签又无法做自我的校准,精度自然也会受到影响。
TDOA即“到达时间差”,这种方式的一次测距是由两个UWB基站和一个UWB标签实现的。
无线传感网络的TDOA节点定位算法
Network World •网络天地Electronic Technology & Software Engineering 电子技术与软件工程• 5【关键词】无线传感网络 TDOA 测距 节点1 引言大量无线、多跳方式的通信传感器节点构成了无线传感网络,这些节点一般由传感器、无线通信、处理器以及能量供应四大模块组成。
它们分别完成本地处理感测数据、消息交换、能量供应以及最关键的感测环境的各项功能。
节点一般会采用随机投放的方式,在某个特定的监控区域密集布设,因此节点的网络拓扑结构是自组织的。
由于节点数量巨大且密集度高,且各自应用类型不同及对应工作环境复杂性,而计算、存储及通信带宽都属于有限资源,故节点必须协同工作,全局任务必须通过局部单个节点的采集、预处理及融合数据来完成。
无线传感网络节点的位置信息对于目标问题的追踪、选定特定节点以完成指定任务、智能设定任务完成路由等,具有非常重要的意义,而对节点的准确位置信息的获取是WSN 的研究和应用的基础,精确定位节点对网络的性能和优化至为关键。
目前的节点定位算法主要有两大分支,静态与动态定位算法。
其中,静态定位算法又分为测距与非测距两种。
测距算法节点位置稳固不变,对硬件要求比较高,定位精度较高,通信量与计算量较大。
本文讨论的TDOA 算法即为WSN 的静态测距算法。
2 TDOA算法的性能改进方向TDOA 定位不需要精确的时间同步,但结果精度高,而且操作方便、实现简单,其实现定位主要利用距离相关性,即需测量待定位节点与附近3个或以上节点间的距离,通过三角测量、三边测量或极大似然估计等坐标计算方法,算出待定位节点的相对坐标信息,最后结合辅助信息修正坐标计算结果,降低测量误差。
2.1 改进参照节点的选择方法无线传感网络的TDOA 节点定位算法文/覃琪 谭松鹤 何传波此方法主要考虑到算法中的参照节点选择对定位系统实际运行的效率及消耗的影响。
TODA 算法需要多个节点协同工作来实现定位,这些参照节点的数量是庞大的。
一种基于PTP协议的局域网高精度时钟同步方法

一种基于PTP协议的局域网高精度时钟同步方法
宋波;孙超;姜守达
【期刊名称】《自动化技术与应用》
【年(卷),期】2010(029)001
【摘要】PTP协议是IEEE 1588 中定义的一种精密时钟同步协议,广泛应用于分布式系统中.但当采用纯软件实现时,同步精度受到网卡的缓存效应、网络的平稳性和操作系统的进程调度等多种因素的影响,难以达到亚毫秒的精度.本文通过分析各种影响因素的特点,结合PTP协议时钟同步机制,提出了一种高精度时钟同步方法,通过采用握手机制以及对测量数据进行处理,有效减弱了各种因素的影响,并结合基于CPU定时器构造的高精度时钟,实现了亚毫秒精度的时钟同步.
【总页数】5页(P67-70,74)
【作者】宋波;孙超;姜守达
【作者单位】哈尔滨工业大学,自动化测试与控制研究所,黑龙江,哈尔滨,150001;哈尔滨工业大学,自动化测试与控制研究所,黑龙江,哈尔滨,150001;哈尔滨工业大学,自动化测试与控制研究所,黑龙江,哈尔滨,150001
【正文语种】中文
【中图分类】TP393.1
【相关文献】
1.一种双余度时间触发协议(TTP)总线系统故障容限时钟同步方法 [J], 苏罗辉;张兴隆;刘振荣
2.用于船舶综合电力系统同步测量的高精度PTP混合时钟同步方法 [J],
3.一种改进IEEE 1588协议的时钟同步方法 [J], 王家林;杨宣访;刘蕾
4.基于TDOA系统的高精度软时钟同步方法 [J], 严格;侯宏卫;罗易凡;房天昊;王闻今;吴驰
5.一种高精度PTP时钟同步方法及应用 [J], 黄化吉;吴其伟;江锐;袁金保;杨雪松因版权原因,仅展示原文概要,查看原文内容请购买。
WSN基于测距的定位方法

WSN基于测距的定位方法无线传感器网络(Wireless Sensor Network,简称WSN)是由大量分布在空间中的低功耗传感器节点组成的网络系统,这些节点能够自主感知环境信息、自组织构建网络、自适应地采集和处理数据。
WSN在许多领域有广泛的应用,如环境监测、智能交通、军事侦查等。
其中,测距定位是WSN中的一个重要问题,即通过测量节点之间的距离来估计节点的位置。
本文将介绍几种基于测距的定位方法。
1.RSSI定位方法:RSSI(Received Signal Strength Indicator)定位方法是一种基于信号强度的测距定位方法。
节点通过测量收到的信号强度来估算节点之间的距离。
节点之间的距离与接收到的信号强度之间存在一定的函数关系,可以通过预先实验得到的RSSI距离模型进行距离估计。
2.TOA定位方法:TOA(Time of Arrival)定位方法是一种基于时间的测距定位方法。
该方法通过测量信号发送和接收的时间差来计算节点之间的距离。
需要节点具备高精度的时钟同步和时间戳功能,并且要考虑信号传播速度的影响。
3.TDOA定位方法:TDOA(Time Difference of Arrival)定位方法也是一种基于时间的测距定位方法。
该方法通过测量信号到达不同节点的时间差来计算节点之间的距离。
与TOA方法相比,TDOA方法只需测量时间差,而无需具有高精度的时钟同步。
4.AOA定位方法:AOA(Angle of Arrival)定位方法是一种基于信号到达角度的测距定位方法。
该方法通过测量信号到达节点的入射角度来计算节点之间的距离。
需要节点具备方向性天线,并且需要考虑信号传播过程中的多径效应。
5.融合定位方法:融合定位方法是将多种测距定位方法结合起来进行定位的方法。
通过将多个测距定位方法的测量结果进行加权融合,可以提高定位的精度和鲁棒性。
常见的融合定位方法有加权平均法、最小二乘法等。
需要注意的是,以上介绍的测距定位方法都有各自的优缺点,适用于不同的环境和场景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Hans Journal of Wireless Communications 无线通信, 2019, 9(6), 185-198Published Online December 2019 in Hans. /journal/hjwchttps:///10.12677/hjwc.2019.96024High Precision Soft Clock SynchronizationMethod Based on TDOA SystemGe Yan, Hongwei Hou, Yifan Luo, Tianhao Fang, Wenjin Wang, Chi WuNational Mobile Communications Research Laboratory, Southeast University, Nanjing JiangsuReceived: Dec. 5th, 2019; accepted: Dec. 23rd, 2019; published: Dec. 30th, 2019AbstractBased on the clock synchronization problem in TDOA (Time Difference of Arrival) real-time posi-tioning system, a cross-recognition synchronization method is proposed. The soft clock synchro-nization design of TDOA positioning system is implemented on the DW1000 module provided by Decawave. Considering the transceiver characteristics of the module, only one signal can be transmitted in space at the same time. The method includes the communication protocol between the primary base station, the secondary base station and the user tag. The communication time slots between the modules are arranged to solve the problem of interference. At the same time, the method analyzes the communication process between modules to derive the linear equations that are satisfied between time stamp, clock frequency drift and time axis deviation. The least squares solution is substituted into the TDOA positioning algorithm to complete a clock synchro-nization and positioning with the user tag. The method proposed in the paper fully considers the requirements of TDOA real-time positioning system, and has the advantages of low delay, simple implementation and easy analysis.KeywordsIndoor Positioning, TDOA System, Soft Clock Synchronization, Least Squares基于TDOA系统的高精度软时钟同步方法严格,侯宏卫,罗易凡,房天昊,王闻今,吴驰东南大学移动通信国家重点实验室,江苏南京收稿日期:2019年12月5日;录用日期:2019年12月23日;发布日期:2019年12月30日严格 等摘 要文章基于TDOA (Time Difference of Arrival ,到达时间差)实时定位系统中的时钟同步问题,提出了一种交叉互验同步方法,在由Decawave 公司提供的DW1000模块上实现TDOA 定位系统的软时钟同步设计。
考虑到模块的收发特性,同一时刻只能允许一条信号在空间中传输,该方法中包含主基站与从基站和用户标签的通讯协议,对模块之间的通讯时隙进行安排,解决了通讯信号互相干扰的问题。
同时,该方法通过对模块间通讯过程进行建模分析,推导出时间戳、时钟频率漂移与时间轴偏差之间满足的线性方程组,将其最小二乘解代入TDOA 定位算法,完成一次时钟同步与标签定位。
文章提出的方法充分考虑TDOA 实时定位系统的需求,具有时延低、实现简单、易于建模分析等优点。
关键词室内定位,TDOA 系统,软时钟同步,最小二乘法Copyright © 2019 by author(s) and Hans Publishers Inc.This work is licensed under the Creative Commons Attribution International License (CC BY). /licenses/by/4.0/1. 引言移动定位服务在人们的生活中发挥着越来越重要的作用,如停车场中车辆的定位、医院中患者的定位、火灾现场中受困人员的定位等。
其在给人们提供便利的同时,也为定位系统的性能提出了更高的要求。
目前,关于移动终端的定位有多种解决方案,包括基于AOA (Angle of Arrival ,到达角度)的定位技术[1]、基于RSS (Received Signal Strength ,接收信号强度)的定位技术等[2]、基于TDOA (Time Difference of Arrival ,到达时间差)的定位技术[3]、基于TOA (Time of Arrival ,到达时间)的定位技术[4]。
而在这些解决方案中,基于TDOA 的定位技术从实时性、准确性、低功耗性等多方面满足了定位服务的需求,此外,其易于操作,无需对移动终端提出要求,可直接向用户提供定位服务,这一系列优点使TDOA 实时定位算法得到了广泛应用。
对于TDOA 实时定位系统,基站间的时钟差异会显著影响信号到达时间差的测量,从而影响最终的定位效果。
而在实际情况中,由于晶振老化程度、频率特性、温度等因素的不同,不同芯片的时钟频率会产生漂移。
并且,芯片上电时间的差异导致芯片内部时间戳计数器的起始点不同,从而使绝对时间轴产生偏差。
时钟频率的漂移和时间轴的偏差将会使TDOA 实时定位系统解算出的坐标出现错误。
所以,需要提出一种可应用于TDOA 实时定位系统的时钟同步方法。
最初的时钟同步系统[5]为硬布线式结构,包括同步信号和时钟频率生成器,同步信号与基站模块的引脚连接,可强制将片内系统时钟计数器复位为零,使得不同基站间的时间轴差异问题得以解决。
而时钟频率生成端为所有基站芯片提供频率一致的时钟,从而防止不同基站模块晶振由于自身老化或周围环境等原因产生的频率漂移。
在硬时钟同步系统中,不同基站之间依然会因为中央频率和同步信号的传输过程产生误差,造成时间轴的差异和时钟频率的漂移,并且布线成本高,对系统架构要求严格,不利于实际系统的部署。
因此,适用于实际系统的软时钟同步设计引起了研究人员的广泛关注。
在过去的研究中,针对无线网络中的软时钟同步提出了许多方法。
其中,可以按照系统是否具有一定拓扑结构将方法分为两类。
具有一定拓扑结构的时钟同步方法如[6] [7],其时钟同步复杂度低,但对同严格 等步过程中的错误较为敏感,易产生错误传播。
针对此问题,论文[8]提出了一种基于对同步信息的周期性泛洪传播和隐式动态拓扑更新完成时钟同步过程的方法,对链路间的时钟同步过程错误有较强适应性。
其它时钟同步方法没有拓扑结构,主要通过多基站间的信息交换完成时钟同步过程。
对于同步过程的优化可以按照信息交换协议与参数估计方法进行分类。
论文[9] [10] [11]均在基站网络中选取一个主基站作为参考基站,该基站周期性地向其它基站发送时钟同步信息或时钟数据校验包,而其它接收基站则根据接收信息完成时钟同步。
论文[12] [13]则根据基站间的信息交换构建网络全局虚拟主时钟,所有基站的时钟均与全局虚拟主时钟进行同步,其中,论文[13]使用自然选择粒子群算法对网络间基站的信息交换进行数据自适应融合,提高全局虚拟主时钟的精度,进而改善时钟同步精度。
除此之外,论文[14]选取网络中的两个基站作为主基站,主基站之间完成时钟同步信息的交换,而其它基站则通过监听主基站之间的信息交换实现时钟同步。
除信息交换协议外,对时间轴偏差量与时钟频率漂移量的估计方法也影响着系统的性能。
论文[10] [14] [15]提出了基于极大似然法的参数估计方法,通过基站之间交换的信息解算时间轴偏差量与时钟频率漂移量的极大似然估计解。
论文[11] [13] [16] [17]则提出了存在测量误差与同步误差场景下基于卡尔曼滤波器的参数估计方法,对实际系统中的误差和噪声表现进行了优化。
此外,论文[18]将时钟同步问题转化为控制系统问题,通过基于比例积分法的凸优化建立了线性时钟同步机制。
考虑到时钟同步系统对个别基站时间信息的容错性,论文[7] [12] [15] [19] [20]提出了分布式时钟同步方法,并通过共识算法完成最终的时钟同步。
特别地,论文[7]使用JEGA (Joint estimation and gos-sip-averaging algorithm ,联合估计与传播平均算法)对抗同步过程中的噪声,论文[19]则采取两个共识算法的级联完成本地信息的平均。
现有的软时钟同步方法对基站端的算法复杂度要求较高,且有些方法要求基站端有较高的功率和较强的并行处理能力,不适用于低成本系统的架构。
并且,这些方法中的时钟同步过程与TDOA 定位过程冲突,必须交替进行,无法做到实时同步,导致最终定位效果受到影响。
针对现有方法存在的问题,本文提出了一种交叉互验时钟同步方法,可在TDOA 定位的过程中实现软时钟同步。
该方法通过定义基站间的通讯协议,对模块之间的通讯时隙进行安排,解决了通讯信号互相干扰的问题。