悬架K&C特性及其优化设计
理论力学在汽车中的应用三千字intital
理论力学在汽车中的应用三千字intital 本人学力学的,请教汽车行业前辈力学在汽车行业中可以做什么工作,都需要掌握什么技术啊?凡是机械工程,都肯定要涉及力学分析。
关于汽车中的力学应用,应该和运动学和流体结合起来。
车辆是一个动态物体,底盘的力学分析,弹簧的应力和减震器的吸能,要结合动态的动量来设置缓冲度,悬挂的摆动和强度要求根据车辆类型和需求有不同的结构,分析摆臂的动态受力。
车身结构前部和后部的吸能溃缩,中央的高强度支撑,如何布局钢梁结构能兼顾强度大和用料少两点也是现代汽车最关心的结构问题。
车外形的设计,撞风的风阻系数和车前部小部件的抗风能力。
等等这些大体就是汽车整体外结构中的力学应用。
再细一点到内部结构的话可能会考虑到座椅的软硬,座椅的受力强度(即紧急情况时的承托能力),气囊的冲击力度对人的保护,转向助力的助力调配及拉杆的受力强度。
等等。
至于做什么工作的话,就看你的取向是什么了,大结构力学分析,就是底盘,车身结构。
往细了分的话,就是内部部件的结构力学分析,这方面往往就要对汽车部件有很深的了解了。
(只能大体概括一下方向,具体如何分析,如何判断就只能自己研究了,我也无法说明,虽说都列出来了,但是毕竟专业不是汽车,所以,很多只是知道需要什么分析,具体如何分析并不能很有把握的说都知道)坐标XXXX大学汽车学院。
我们一个老师曾经说过,数学好力学好,哪个导师都会喜欢的。
如果你读过车辆工程本科必修课汽车理论,就会发现这东西太简单了,低幼版动力学。
按照本教材内容,大概分汽车动力性、燃油经济性、制动性、操纵稳定性、平顺性几个大块,暂时不包括碰撞安全性。
其中除了燃油经济性在讨论的时候动力学内容相对较少,其他全都是动力学分析,而又以操稳跟平顺性稍微复杂。
然而即便复杂,为了方便理论简化模型的介绍,也都尽可能简化了。
比如操稳,很少在三维空间内建模,介绍转向稳定性用的是平面运动的模型,介绍侧倾就暂时不考虑什么不足转向过多转向。
载货汽车的前悬架建模及仿真分析
更 为直接方便 。 为此利用动力 学仿真 软件 AD MS A / C AR建 立 某 特定 车 型 的悬架 系统 的直观 模 型 , 并 进 行仿 真分 析 . 此悬 架 的悬挂 特性 进行 评价 。 对
1 悬架 系统建模
11 D MS Ca 建模 的步 骤 . A A / r
的好坏直接影响汽车的使用性能 。但是汽车悬架 系 统是 比较 复 杂 的空 间机 构 , 这些 就 给运 动 学 、 动 力 学分 析 带 来 了非 常 大 的 困难 。基 于 A A D MS的
t ewh e r c h n ewa t d e n n lz d y w ih t e c r e o et ea ge a e n l ,k n p n c s ra g ea d t e h e l a k c a g ss id a d a ay e ,b h c u v f h o n l ,c mb r ge i g i a t n l n t u h t a e h
w e lrc h newt w el o et gw r b ie. h o t nl dl a o tru n l igt hn e uv n h e t kc ag i hes f ai e ot nd T em r r i a moe w s th g aa z eca g re d a h b n e a e ao g o h yn h c a
汽车行驶平顺性
上、下限频率与中心频率的关系为:
f f
u l
1.12 0.89
fc fc
一、汽车行驶平顺性的评价指标
1/3倍频法认为:同时有许多个1/3倍频带都有能量作用于人体 时,各个频带振动作用无明显联系,对人体产生的影响主要是 人体感觉振动强度最大的那个1/3倍频带所造成的。
将振动传至人体加速度的功率谱密度Gp(f)所对应的1/3倍频带中心频 率fci在带宽Δfi区间积分,得到各个1/3倍频带的加速度均方根值分量σpi
车轮动载荷。 评价指标:人体对振动的响应、行驶安全性。
研究平顺性的主要目的:控制汽车振动系 统的动态特性,使振动系统的“输出”在 给定工况的“输入”下不超过一定界限, 以保持乘员的舒适性 。
平顺性分析——建立在随机振动理论的基 础上。
一、随机振动基础和路面输入(补充)
1. 随机振动基本概念
ISO2631用加速度均方根值(σrms)表示人体在1~80Hz范围内的三个感觉 界限,即:
①“舒适—降低界限TCD”——人体感觉良好,可以顺利完成吃、写、读 等动作;
②“疲劳—工效降低界限TFD”——驾驶员能够保持正常进行驾驶; ③“暴露极限”——人体可以承受振动量的上限。
“舒适—降低界限TCD”为“疲劳—工效降低界限TFD”的1/3.15;“暴露 极限”为“疲劳—工效降低界限TFD”的2倍。
人体对加速度敏感度的加权系数
倍频带的中心频率 (Hz)
加权系数 w(fci)
垂直振动
水平振动
1.0
0.5
1.0
2.0
0.71
1.0
4.0
1.0
0.5
8.0
1.0
0.25
横风对汽车稳定性影响的计算分析

横风对汽车稳定性影响的计算分析作者:赵守月姜国彬戴锐卢祖秉来源:《汽车科技》2018年第05期摘要:本文基于线性二自由度汽车模型,考虑了悬架转向效应对轮胎刚度的影响,建立了可以用于横风稳定性分析的预测模型,并对某一车型进行计算预测和试验验证,试验结果与计算预测结果吻合度较高,该模型可以用于车辆开发初期的横风稳定性快速分析和预测。
关键词:横风稳定性;线性二自由度;悬架转向效应;等效侧偏刚度中图分类号:文献标识码:文章编号:1005-2550(2018)05-0024-05Abstract: Based on two freedom vehicle model, take the influence of suspension steering effect to tire cornering power into account, build a vehicle stability forcast model to analyse the wind influence, and also have a contrast with the test result, the result shows that the forcast model accuracy is good, so it can be apply to do quick analysis and forcast during vehicle develop initial stage.Key Words: side wind stability; two freedom vehicle model; suspension steering effect;equivalent cornering power1 概述高速行驶的汽车在与大货车会车或超车、驶出隧道、以及经过大桥等场景下,经常会受到自然界中横向风的作用,车辆的行驶状态受到干扰,产生侧倾、横向速度、横摆角速度等影响,偏离行驶轨道,驾驶员需要操作方向盘维持车辆直线行驶。
液压马达式汽车主动稳定杆系统建模与控制

液压马达式汽车主动稳定杆系统建模与控制赵韩;赵福民;黄康;邵可;孙浩【摘要】以液压马达式主动稳定杆系统为研究对象,推导得到了液压马达式主动稳定杆的非线性动力学模型。
利用线性化反馈的滑模控制方法设计了其控制器,并利用 Lyapunov 理论对控制系统的稳定性进行了证明。
通过 CarSim 和MATLAB/Simulink 对主动稳定杆系统进行了联合仿真,得出安装液压马达式主动稳定杆系统的车辆在双移线工况下运行的响应曲线。
为了验证设计的控制方法,进行了实车试验。
结果表明,与被动稳定杆相比,主动稳定杆系统具有较好的抗侧倾特性以及乘坐舒适性。
%Taking active stabilizer bar system with hydraulic motor as the obj ect,a nonlinear dy-namics model of active stabilizer bar system with hydraulic motor was established.The controller was designed with the control method for the feedback linearization sliding mode.And the stability of the control system was analyzed by Lyapunov stability theory.On the basis of the CarSim-MATLAB/Simulink co-simulation of the active stabilizer bar system,the response curves on the double-lane-change conditions were achieved.A real vehicle test was also worked out for the verification of the de-sired control method.The results show that the active stabilizer bar system has the preferable charac-teristics of anti-roll and ride comfort compared with the passive stabilizer bar.【期刊名称】《中国机械工程》【年(卷),期】2016(027)014【总页数】6页(P1976-1981)【关键词】主动稳定杆;非线性动力学;滑模控制;防侧倾【作者】赵韩;赵福民;黄康;邵可;孙浩【作者单位】合肥工业大学,合肥,230009;合肥工业大学,合肥,230009;合肥工业大学,合肥,230009;合肥工业大学,合肥,230009;合肥工业大学,合肥,230009【正文语种】中文【中图分类】U461汽车转弯时,受到离心力的作用,车身在侧向加速下会发生侧倾,不但易造成翻车等事故,而且降低了车内人员的舒适性和汽车的操纵性,间接降低了安全系数[1]。
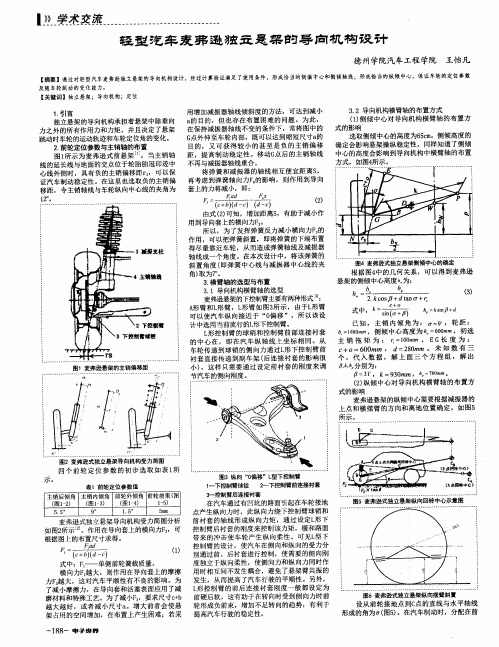
轻型汽车麦弗逊独立悬架的导向机构设计
l 一 5 )
5 m m
( 图卜3 )
9。
( 图卜4 )
1 . 5 。
在汽车通 过有凹坑的路面 引起 在车轮接地
点产生 纵向力时 ,此 纵向力绕下控 制臂球销和 前 衬套 的轴线 形成纵 向力矩 ,通过 设 定L 形 下 控 制臂后衬套 的刚度来控制 该力矩,缓和路面 带来 的冲击使 车轮产 生纵 向柔性 。可 见L 型 下 控制臂 的设 计,使汽车在侧 向和纵 向的受力分 别通过前 、后衬套进行控 制,使需要 的侧 向刚 度独立 于纵向柔性 ,使侧 向力和纵 向力同时作 用时相 互间不发生耦合 ,避免 了悬架 臂共振 的 发生 ,从而提 高了汽 车行驶 的平 顺性。另外 , L 形控制 臂的前 后连接 衬套 刚度 一般都 设定为 图6麦弗逊 式独立悬架纵向摆臂斜置 前硬 后软 ,这 有助 于在转 向时受到侧 向力 时前 设 从前轮 接地 点到c 点的直线 与水 平轴线 轮 形成负前束 ,增加不足转 向的趋势 ,有利 于 形成 的角为 ( 图5 ) 。在汽 车制动时 ,分配 在前 提高汽车行驶的稳定性 。 = .ຫໍສະໝຸດ . 丽 d一 南
,
,
=
图2麦弗逊式独立悬架导 向机构 受力简图
四个 前轮 定位 参 数 的初 步 选 取 如表 1 所
示。
表 1前轮定位参数值 主销后倾角 主销 内倾角 前轮外倾角 前轮前束 ( 图
( 图1 - 2 )
5 . 5 。
图3纵向 ‘ ‘ 0 偏 移”L 型下控制臂 1 —下控制臂球铰 2 一下控制臂前连接衬套
图 1麦弗逊悬架 的主销偏移距
… … … … … … … 一 … … … … … …
基于ADAMS的皮卡板簧动力学建模方法及性能仿真
基于ADAMS的皮卡板簧动力学建模方法及性能仿真孔德琨【摘要】文章根据钢板弹簧模型建立所需要的参数,基于ADAMS/view中的板簧工具箱,完成某皮卡后钢板弹簧的动力学建模,并在ADAMS/view下实现性能仿真,求解出钢板弹簧的刚度曲线,为下一步钢板弹簧悬架的优化设计提供理论依据.【期刊名称】《汽车实用技术》【年(卷),期】2015(000)011【总页数】3页(P76-77,102)【关键词】ADAMS/view;皮卡;钢板弹簧;性能仿真【作者】孔德琨【作者单位】安徽江淮汽车股份有限公司,安徽合肥230601【正文语种】中文【中图分类】U467.2前言钢板弹簧是现代汽车悬架结构中应用很广泛的弹性元件之一,主体是由若干金属叶片叠加而成.其近似一根等强度的弹性梁,主要承受来自各个方向上的力和力矩,同时还承担汽车在启动和制动时的扭矩。
本文基于Adams/view中的板簧工具箱,根据实际参数,建立某皮卡的钢板弹簧动力学模型,并初步实现其性能仿真。
1、Adams简介Adams(Automated Dynamic Analysis of Mechanical Systems)是由美国MDI公司开发的一款虚拟样机分析软件,主要用于仿真机械系统的性能、运行轨迹、碰撞、峰值载荷模拟以及计算有限元的输入载荷等等。
在接近于现实的工作条件下逼真地模拟所有运动情况,并且可以快速对比分析多种设计方案,直至确定最优的设计方案。
2、ADAMS板簧建模方法2.1 板簧建模方法在Adams中,有着多种钢板弹簧的建模方法,主要包括等效中性面法、三段梁法和离散单元梁法等:等效中性面法:主要将所有的主簧片看成一整片,然后分成若干刚体,刚体之间用柔性梁连接,刚体质量和转动惯量按照所有主簧片整体的实际质量参数;副簧建模方法同样。
主、副簧片之间的接触通过Adams中接触函数模拟。
三段梁法:这是一种简化的钢板弹簧模型,将钢板弹簧看成中间刚性衬套或者球铰连接起来,前、后梁与车架用弹性衬套或者铰链副连接,并通过选择合适的衬套参数,使之达到实际钢板弹簧的刚度。
重载汽车动力学性能多目标优化分析

重载汽车动力学性能多目标优化分析张景梅;崔素华【摘要】以三轴重载汽车为例,以影响其动力学性能的悬架参数优化为目的,在随机路面激励的作用下,构建了三点虚拟激励模型,通过建立三轴重载车的六自由度模型,利用虚拟激励法得出驾驶室座椅均方根值表达式,并以加权的加速度均方根值作为平顺性的评价指标;建立汽车转弯运动力学模型,得出侧倾稳定性因数与悬架的侧倾特性和由路面随机激励所产生的动载荷之间的关系,确定以稳定性因数作为汽车侧倾运动的稳定性评价指标;将整车的95百分位四次幂合力作为道路友好性的评价指标.根据悬架刚度和阻尼与各性能评价指标之间的关系,基于Isight软件,运用遗传算法NSGA-II实现了汽车的平顺性、稳定性和道路友好性的多目标综合优化,从而得出了悬架刚度和阻尼的最佳匹配值.该思路对于多轴重载车的参数设计具有参考价值.【期刊名称】《北京交通大学学报》【年(卷),期】2018(042)003【总页数】7页(P120-126)【关键词】重载汽车;多目标优化;评价指标;稳定性因数;平顺性;道路友好性【作者】张景梅;崔素华【作者单位】北京交通大学机械与电子控制工程学院,北京 100044;河北科技大学机械电子工程学院,石家庄 050081;河北科技大学机械电子工程学院,石家庄050081【正文语种】中文【中图分类】U461.1;U463.33随着我国经济的不断发展,货物运输行业对道路交通运输能力的需求也越来越大,道路修筑技术及路面平整度不断得到提高,载货汽车的性能也相应提高,基于汽车行驶平顺性、操纵稳定性、道路友好性的参数优化研究早已得到国内外研究人员的极大关注.文献[1]提出对于复杂多体柔性系统的仿真引入有限元和模态叠加法,应用有限差分法传感器得到了汽车平顺性参数的最优化结果;文献[2]基于梯度信息的近似优化方法,以及平顺性和操纵稳定性,对车辆悬架系统参数进行了高效优化;文献[3]通过分析车速、轴距、悬架刚度、阻尼等对路面损伤的影响,得出道路破坏系数对于悬架刚度和阻尼极为敏感;文献[4]针对平顺性与操纵稳定性的相互影响机理进行分析;文献[5]兼顾行驶平顺性和道路友好性建立了载货车的悬架参数优化模型,对悬架参数进行了优化分析;文献[6]为改善某商用车的平顺性和道路友好性,对悬架刚度和阻尼进行了优化;综合国内外汽车平顺性、操纵稳定性与道路友好性及车辆性能参数优化研究现状,尽管学者们做了大量研究,但在车辆—路面相互作用的研究中仍存在不足:其研究内容多为车辆平顺性或操纵稳定性与道路损伤相结合[7],尤其是关于载货车稳定性与路面损伤相互关系的研究极为少见.且研究结果多是通过分析优化相关参数后,平顺性或操纵稳定性得到了一定的改善,但随着公路的高速化、重载化,提高重载汽车整体性能,延长汽车零部件寿命,减少道路损伤维修费用为目的的基于道路友好性的整车动力学综合性能研究是一个值得探讨的重大课题,因此对于汽车的主要动力学性能平顺性和稳定性兼顾道路友好性的综合性研究分析,尤其是对与3方面性能均有密切关系的汽车悬架参数的优化分析,在汽车产业具有重要的理论意义和工程应用价值.在汽车动力学研究和路面动力学研究中,路面的不平整引起车辆的振动,车辆的振动又反作用于路面,激励输入模型能否准确地反映实际研究的路面对汽车性能分析研究的准确性有着极其重要的影响,目前对于路面随机激励模型的构建常用理论模拟法,针对路面不平度的理论模拟法国内外学者进行了大量的研究和验证,模拟方法主要有滤波白噪声法[8]、谐波叠加法[9]、AR或ARMA模型[10]等,滤波白噪声法和谐波叠加法主要适宜单轮路面激励的时域分析,且计算量大;AR或ARMA 模型对于路面不平度的检测数据有限.因此,建立合理的路面模型对车辆动力学性能研究至关重要.本文作者以三轴重载车DFL1250A9为例,分别建立其平顺性仿真半车模型和稳定性动力学分析模型,构建B级路面的三点虚拟随机激励模型,针对重载车在转弯工况下不同的行驶力学性能——平顺性和侧倾稳定性,指出悬架参数与道路友好性评价指标、侧倾稳定性评价指标、平顺性评价指标之间的关系,对重载汽车侧倾稳定性、平顺性基于道路友好性进行了多目标优化分析.1 载货车动力学模型1.1 重载汽车动力学半车模型汽车行驶中会受到纵向、垂向和横向3个方向的输入,各方向所表现出来的运动响应特性必然是相互作用、相互耦合的.在匀速转弯运动的工况下,车厢产生侧倾,对于25 t重载车的承载量主要集中于货厢,由侧倾产生的垂向耦合运动对于驾乘人员的垂向舒适度影响可忽略不计,故在平顺性模型建立时,只考虑汽车的垂向运动和俯仰运动.首先对复杂的整车系统进行适当简化和假设:1) 车辆对称于纵向对称面,左右轮胎对应的路面不平度相同;2) 假设路面的不平度为符合正态分布的各态历经平稳随机过程,同侧前、中、后各个轮胎对应的路面不平度不相同,而且存在由轴距引起的响应时滞;3) 轮胎刚度、座椅刚度简化为线性函数;悬架阻尼为速度的线性函数;4) 各轮胎与地面单点接触,无弹跳;路面激励作用在轮胎与路面的接触中心点上.将三轴重载汽车系统近似线性化为一半简化模型,前、中、后轮受到3个随机输入,受力图见图1.图1中各参数设置如下:mb为驾驶室质量为车体质量;mc为平衡杆的质量;Ib、Ic分别为车体和平衡杆俯仰转动惯量;mf、mrm、mrr分别为前悬架、平衡悬架前桥、平衡悬架后桥的非簧载质量;Kc1、Kc2分别为驾驶室的前悬置刚度和后悬置刚度;Cc1、Cc2分别为驾驶室的前悬置阻尼和后悬置阻尼;Kf、Cf分别为转向悬架钢板弹簧刚度和减振器阻尼;Kr、Cr分别为平衡悬架钢板弹簧刚度和减振器阻尼;Ktf、Ctf分别为转向悬架轮胎的刚度和阻尼;Krm、Crm分别为平衡悬架处中桥轮胎的刚度和阻尼;Ktr、Ctr分别为平衡悬架处后桥轮胎的刚度和阻尼;qf、qm、qr分别为分别为转向悬架轮胎、平衡悬架中桥、后桥轮胎垂向位移激励. 根据达朗伯原理建立六自由度的振动运动微分方程(1)式中:Z=[Z1,Zb,Zc,Zs,θb,θc]T;,b,c,s,b,c]T;Zs、Zb、Z1、Zc分别为驾驶室座椅、车体、前桥、平衡悬架中后桥垂向振动位移;θb、θc分别为车体与平衡悬架中平衡杆的俯仰振动位移;M为质量矩阵;C为系统阻尼矩阵;K为系统刚度矩阵;Cq为路面激励阻尼;Kq为路面激励刚度;Q为路面激励位移.图1 三轴重载车六自由度模型Fig.1 6 DOF model of three axle heavy vehicle 利用文献[11],由式(1)可得到频域范围内的6个频响函数的线性非齐次方程组A6×6×[H1(w)H2wH3wH4wH5wH6(w)]T=[Q1w 0 Q3w 0 Q5w 0]T(2)A6×6为各响应频率响应的系数矩阵,经验证它的秩与其增广矩阵B6×7的秩相等,故方程组有解.后面为书写简单省略自变量w.式中H1、H2、H3、H4、H5、H6]T 对应6个振动响应相对前轮胎随机激励输入的频响函数向量、、、、、T.可求得座椅加速度的频响函数1.2 操纵稳定性模型汽车行驶过程中的操纵稳定性主要包含纵向稳定性和侧向稳定性.纵向稳定性失控主要体现在坡道上纵向行驶时,对于汽车的侧向稳定性,主要表现为汽车的横向滑移或侧翻.当汽车在匀速转弯时产生侧倾运动,车厢的倾斜使悬挂系统发生侧向变形.将整车模型简化为只有绕z轴的横向摆动和沿y轴的侧向运动的二自由度系统见图2.建立汽车侧倾动力学模型即侧倾稳定性因数与悬架的侧倾特性和由路面随机激励所产生的动载荷之间的关系.图2 三轴载重车二自由度模型Fig.2 2 DOF model of three axle vehicle图2中:a1、a2、a3分别为3个轮胎的侧偏角;β为汽车质心的侧偏角;δ为前轮转角;ωr为汽车横摆角速度;m为整车质量;Iz为汽车绕z轴的转动惯量;L1为中后轴的轴距;L2、L3分别为中轴和前轴距汽车质心的距离;u、v分别为汽车质心的绝对速度V在y轴和x轴的分量,v即汽车行驶速度.在前轮角输入下,暂时忽略悬架的影响,假设汽车的垂向位移、侧向位移均为零,只考虑汽车水平的平面运动,建立系统的微分方程如下k1+k2+k3β+×ωr-k1δ(3)L3k1-L2k2-(L1+L2)k3β+×ωr-L3k1δ=Izr(4)汽车作等速圆周运动时,r=0,=0.可求得汽车的转向灵敏度γ=ωr/δ.ki(i=1,2,3)为前、中、后轮的侧偏刚度.下标1、2、3表示前、中和后轮.由式(3)和式(4)可求得稳定性因数为(5)可知轮胎的侧偏刚度Ki影响Kw的值.根据文献[12],知轮胎侧偏刚度又与轮胎的垂直载荷有着密切的关系,其关系式如下kil(r)=0.067782-9..129(6)式中:为前、中、后三轴的轮胎载荷;下标字母l、r表示左、右.ΔFzil(r)+Fid,i=1,2,3(7)式中:Fzil(r)为静止时前、中、后轴的左(右)轮胎的地面垂直反作用力.垂向载荷的变动量包含两部分:由于路面随机激励在三轴上产生的动载荷Fid和前、中、后三轴左(右)轮胎由于离心力而产生垂直反力的变动量ΔFzfl(r).于是得到改进的稳定性因数为Kl(r)=(8)2 三点路面随机虚拟激励模型本文中的三轴重载车,所受路面激励属于多点激励,由于较大的轴距导致3个轮胎所受异相位的平稳迟滞路面激励,以B级路面工况为例,在频域范围内建立路面模型.假定前、中、后轮受到相同相干平稳的路面激励,建立路面的3个激励点为(9)可把Q(t)视为广义的单点激励,假设Q(t)的自功率谱密度为已知常数,前、中、后轮受到激励的时刻分别为t1、t2、t3,应用虚拟激励法得到三点虚拟激励模型为(10)式中:f、m、r分别为前、中、后轮所受虚拟激励.3 动力学性能评价指标3.1 平顺性评价指标根据GB/T 4970—2009《汽车平顺性试验方法》利用座椅传递给人体加速度确定对应的加权加速度均方根值作为平顺性的评价指标,本文采用驾驶室座椅垂向加速度代替人体加速度进行分析.以驾驶室座椅垂向振动的加权加速度均方根值作为平顺性的评价指标,则有(11)式中:Wzsw 为加权函数,此处为1;为前轴路面激励输入的功率谱密度;为驾驶室座椅垂向加速度频响函数.3.2 操纵稳定性评价指标汽车的操纵稳定性涉及内容广泛,用于表征汽车侧倾操纵稳定性的主要是汽车曲线行驶时的时频响应特性.在汽车等速转弯行驶工况下,用稳态时的横摆角速度与前轮转动角度的比值作为汽车在等速行驶下响应的评价标准.而稳态因数的数值表征汽车的稳态响应,通常关于汽车转弯时稳态响应的研究分析中,只考虑汽车结构参数的影响,在此引入了路面随机激励产生的动载影响和悬架刚度及阻尼的影响,并得到了改进的稳定性因数,使得对汽车稳定性研究趋于准确化.在此将式(7)中改进的稳态因数Kl(r)作为侧倾时操纵稳定性的评价指标.3.3 道路友好性评价指标评价道路友好性的指标主要有:动态载荷系数、道路应力因子和95百分位四次幂合力、全概率损伤及加权集合力等.动态载荷系数只能粗略反映动载荷与道路损伤的关系;道路应力因子没有考虑到动载荷的空间重复性;为了全面地反映车辆对道路损伤的实际情况,提高车辆对路面损伤程度的准确度.Cole和Cebon在四次幂定律的基础上,把各车轮动载荷的四次幂叠加[13-14],得到“95百分位四次幂合力”.故将“95百分位四次幂合力”作为在道路的友好性的评价指标,计算公式为Φ=η1fη2fη3fFf-stat4+η1mη2mη3mFm-stat4+η1rη2rη3rFr-stat4=1.1×1+1.645DfFf4+0.9×1.1×1+1.645DmFm4+[0.9×1.1×1+1.645DrFr]4(12)式中:η1i为前、中、后轮胎布置影响系数,本例中的中、后桥为并装双轴,且单侧为双轮,所以η11取1.0,η12、η13均取0.9[15].对于轮胎充气压力影响系数η2i,本例实际车辆的轮胎11.R20胎压约为0.88 MPa,在此取ηi均为1.1[15];D为载荷系数.汽车侧倾时,左、右轮胎的载荷及动载系数发生了变化,左、右轮胎95百分位四次幂合力不再保持无侧倾时理论上的一致性.且汽车左、右侧轮胎产生的动载荷均由侧倾造成的载荷变化量和路面不平度导致的动载荷两部分组成.于是可分别求得汽车产生侧倾后左、右侧轮胎的95百分位四次幂合力,则整车95百分位四次幂合力为左、右侧轮胎载荷95百分位四次幂合力之和.4 悬架参数多目标优化与结果分析由于车辆在行驶过程中速度和路面条件等因素经常变化,优化时设定的行驶工况为:三轴重载车在转弯半径为50 m的B级弯曲路面上以30 km/h的速度匀速行驶. 4.1 优化目标为同时满足平顺性和操纵稳定性的要求,并尽可能减轻对路面的损伤,以函数驾驶室座椅处的垂向振动加速度均方根值、道路友好性95百分位四次幂合力min φ和操纵稳定性因数Kw>0,即降低驾驶员座椅处的垂向振动加速度的均方根值、减少对道路的损伤和稳态运动达到不足转向为优化目标.4.2 选定设计变量由式(8)、式(11)、式(12)可知,汽车的平顺性和侧倾稳定性,道路友好性都与悬架参数有着密切的联系,于是选择前、后悬架的刚度和阻尼为优化分析的设计变量,即X=[KrCrKfCf]T(13)4.3 约束条件1)对于货车平衡悬架的静挠度为fc=50~110 mm,于是本文中平衡悬架的刚度极限约束为Mbg/0.11≤Kr≤Mbg/0.05.式中Mb为簧载质量,m;g为重力加速度,N·m.2)平衡悬架的阻尼系数一般选择Cr=2ζ,式中ζ相对阻尼系数,对于有摩擦的钢板弹簧,ζ的值可选小一些,根据实际和经验可选0≤ζ≤0.2.3)对于前悬架刚度可根据偏频确定,前悬满载偏频范围为1. 50~2. 10 Hz[15].4)悬架动挠度的量值在优化中也要保证,对于载货车,平衡悬架的动挠度fd最大取值范围为60~90 mm[16].这里取最小值60 mm为上限值.所有约束量及约束范围具体见表1.表1 约束量及约束范围Tab.1 Constraint variables and constraints极限值Kr/(N/m)Cr/(N·s/m)Kf/(N/m)Cf/(N·s/m)fd/ mm上限值2 304 60032 600370 00060 0000.06下限值1 047 55021 800168 00025 00004.4 优化结果分析应用Isight软件,选择多目标遗传算法NSGA-II,设置算法种群个体数为32,进化100代,交叉概率为0.9.三轴载重车平顺性、操纵稳定性及道路友好性的多目标优化平台建立.经过优化得到设计变量的Pareto最优解集(蓝色被圈区域),以及其在目标函数空间中的映射Pareto前沿见图3和图4.(a)目标函数道路友好性空间下(b)目标函数座椅加速度均方根值空间下(c)目标函数稳定性因数空间下图3 前悬架刚度和阻尼的Pareto最优解集Fig.3 Pareto optimal solution set for stiffness and damping of the front suspension由图3(a)看出,在95百分位四次幂合力Pareto最优解对前悬架刚度的变化敏感程度较小,随着前悬架阻尼的减小而减小,即车辆较小的前悬架阻尼的减小引起动载荷变小,从而车辆对于道路的损伤程度减弱.图3(b)表明兼顾车辆的平顺性,前悬架刚度和阻尼的Pareto最优解集在刚度大约300 000 N/m、阻尼接近20 000 N·s/m时的范围内.由图3(c)知在前悬架刚度和阻尼较大时,稳定性因数大于0,此时车辆具有较好的不足转向特性,稳定性较好.(a)目标函数道路友好性空间下(b)目标函数驾驶室座椅垂向加速度均方根值空间下(c)目标函数稳定性因数空间下图4 平衡悬架刚度和阻尼的Pareto最优解集Fig.4 Pareto optimal solution set for equilibrium suspension stiffness and damping图4(a)中平衡悬架刚度和阻尼的变动对于95百分位四次幂合力的影响处于不稳定状况,平衡悬架刚度和阻尼均处于极端时,道路所受到的破坏力较大,所以兼顾道路的友好性,平衡悬架的刚度和阻尼不宜最大或最小.同样平衡悬架的刚度和阻尼处于极值时,数值越大,车辆行驶的平顺性越差,需要一个适中的数值.图4(c)中,车辆侧倾时的稳定性因数在平衡悬架的刚度较大时,数值较小,具有较好的不足转向特性,而对于阻尼的影响不是很明显.根据以上分析,基于道路的友好性,车辆要达到较好的舒适性和侧倾稳定性,悬架参数需要一组适中的值.表2列出了设计变量优化前后的数据.表2 设计变量初始值与优化值Tab.2 Initial value and optimal value of design variables设计变量优化前优化后Cf/(N·s/m)50 63648 795Cr/(N·s/m)25 32021 804Kf/(N/m)251 380269 893Kr/(N/m)2 604 0002 995 104表2中数据表明,在优化之后悬架参数都有了一定的变化,前悬架阻尼比优化前降低了3.64%,前悬架刚度比优化前提高了7.36%;平衡悬架的刚度比优化前提高了15.02%,平衡悬架阻尼比优化前减小了13.89%,这与前面对于设计变量收敛过程分析的结论相一致.在表内优化后悬架参数的匹配下,当道路友好性最好时,该车的平顺性和操纵稳定性达到最佳状态.优化后目标函数的结果如表3所示.由表3可见,前后悬架刚度和阻尼优化匹配后,驾驶室座椅垂向加速度均方根值降低了约7%,内侧轮胎稳定性因数增大了约4.78%,外侧轮胎稳定性因数增大了约4.31%,道路友好性指标95百分位四次幂合力减小了约12.6%,使汽车的平顺性、操纵稳定性和道路友好性均有所提高.优化后目标函数的数值与表1中预定的目标函数的约束范围均满足,故此次优化达到了预期效果.整个优化过程与思路为实际工程中汽车设计提供参考.表3 目标函数的优化比较Tab.3 Comparison of optimization results of the objective function目标函数优化前优化后座椅垂向加速度均方根值/(m/s2)0.023 70.022 0内侧轮胎稳定性因数×10-2/(s2/m2)2.985 33.128 0外侧轮胎稳定性因数×10-2/(s2/m2)2.985 33.114 095百分位四次幂和力×1016/(N4)2.28321.995 95 结论1)提出三轴重载汽车三点路面虚拟激励模型,针对具有较大轴距的三轴轮胎上在受异相位的平稳迟滞路面激励时,该模型的提出使平顺性和侧倾稳定性结果的复杂推导过程简单化,该模型的建立为多轴重载车的动力学研究提供了一条捷径.2)在重载汽车侧倾稳定性研究中,由于载重量较大,悬架的刚度和阻尼、路面不平度对于侧倾稳定性有着较大影响,在悬架的侧倾力矩和轮胎侧偏刚度的计算中,既考虑悬架的刚度和阻尼,又引入路面随机激励所产生的动载影响,建立了改进的三轴重载车匀速转弯行驶时的稳定性因数,弥补了对稳定性因数的以往研究中仅仅只考虑悬架刚度的不足,使对于车辆侧倾稳定性的分析更趋于准确化.3)提出了将前、后悬架的刚度和阻尼作为多目标优化分析的设计参量,对载重车的平顺性、侧倾稳定性和道路友好性三方面性能进行了综合优化的思路,通过设计参量、优化目标函数在优化前后的结果对比,得出了前、后悬架参数的最佳匹配,基于道路友好性,汽车的平顺性和侧倾稳定性得到了较好的改善.本文的优化分析思路对多轴载货汽车的性能研究和参数设计、路面的改进、提高车辆行驶的安全性等方面具有重要的理论参考和工程应用价值.参考文献(References):【相关文献】[1] GONCALVES J P C,AMBROSIO J A C.Optimization of vehicle suspension systems for improved comfort of road vehicles using flexible multi-body dynamics[C]//4th Symposium on Multi-body Dynamics and Vibration.Chicago,2003.[2] THORESSON M J, UYS P E, ELS J A S. Efficient optimization of a vehicle suspension system, using a gradient-based approximation method, Part 2: optimization results[J]. Mathematical and Computer Modeling,2009(50):1437-1447.[3] GERTLER J J. Survey of model-based failure detection and isolation in complex plants[J].IEEE Control Systems Magazine,1998(12):3-11.[4] 王维.汽车平顺性与操纵稳定性协同研究与仿真实现[D].吉林:吉林大学,2016. WANG Wei. Cooperative research and simulation realization of automobile ride comfort and handling stability[D].Jilin: Jilin University,2016. (in Chinese)[5] 车华军,陈南,殷国栋.基于操纵稳定性的车辆悬架性能参数稳健设计方法[J].汽车工程,2009,31(4):371-375. CHE Huajun,CHEN Nan,YIN Guodong. Robust design of suspension performance parameters for vehicle handling and stability[J]. Automotive Engineering, 2009,31(4):371-375. (in Chinese)[6] 张志飞,刘建利,徐中明.面向平顺性与道路友好性的商用车悬架参数优化[J].汽车工程,2014,36(7):889-893. ZHANG Zhifei,LIU Jianli, XU Zhongming. Optimization of suspension parameters for commercial vehicle based on ride comfort and road friendliness[J]. Automotive Engineering,2014,36(7):889-893. (in Chinese)[7] 宋康,陈潇凯,林逸.汽车行驶动力学性能的多目标优化[J].吉林大学学报(工学版),2015,45(2):352-357. SONG Kang, CHEN Xiaokai, LIN Yi. Multi-objective optimization of vehicle dynamic performance[J]. Journal of Jilin University(Engineering Edition),2014,45(2):352-357.(in Chinese)[8] 卢凡.陈思忠.汽车路面激励的时域建模与仿真[J].汽车工程,2015,37(5):549-553. LU Fan,CHEN Sizhong. Modeling and simulation of road surface excitation on vehicle in time domain [J].Automobile Engineering, 2015,37(5):549-553.(in Chinese)[9] 王红岩,王钦龙,芮强,等.车辆行驶路面的数字化建模方法研究[J].兵工学报,2016,37(7):1153-1159. WANG Hongyan, WANG Qinlong,RUI Qiang, et al. Research on digitized modeling method of riding road of vehicle [J].Acta Armamentarii, 2016,37(7):1153-1159.(in Chinese) [10] 唐光武,程思远.双轮辙路面激励的时域AR和ARMA模型及计算机仿真[J].公路交通科技,1999(4):58-59. TANG Guangwu, CHENG Siyuan. Time domain AR and ARMA model and computer simulation of double track road excitation[J].Journal of Highway and Transportation Research and Development, 1999(4):58-59. (in Chinese)[11] 林家浩,张亚辉.随机振动的虚拟激励法[M].北京:科学出版社,2004:42-57. LIN Jiahao, ZHANG Yahui. Pseudo excitation method for random vibration[M]. Beijing:Science Press,2004:42-57.(in Chinese)[12] 唐玉福.混凝土搅拌车静态侧倾稳定角计算方法探究[J].专用汽车,2015,1(1):90-92. TANG Yufu. Research on calculation method of static roll stability angle of concrete mixer[J]. Special Purpose Vehicle, 2015,1(1):90-92. (in Chinese)[13] COLE D J, CEBON D. Truck suspension design to minimize road damage[J].Procnstn Mech Engrs,1996, 201(1):95-106.[14] LIEH J. Semiactive damping control of vibrations in automobiles[J]. Journal of Vibration & Acoustics, 1993, 115(3): 340-343.[15] 余卓平,黄锡鹏,张洪欣.减轻重型汽车对道路的损伤_汽车悬架优化设计[J].中国公路学报,1994,7(3):83-87. YU Zhuoping,HUANG Xipeng, ZANG Hongxin.The alleviation of damage to road by heavy vehicle-optimization design of vehicle suspension[J].China Journal of Highway and Transport,1994,7(3):83-87. (in Chinese)[16] 王望予.汽车设计[M].4版.北京:机械工业出版社,2004:133-160. WANGWangyu.Automotive design[M].4th ed.Beijing:China Machine Press,2004:133-160.(in Chinese)[17] 王宵峰.汽车底盘设计[M].北京:清华大学出版社, 2010. WANG Xiaofeng. Automotive chassis design[M]. Beijing: Tsinghua University Press, 2010. (in Chinese)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
悬架K&C特性优化设计研究报告——杨益1、研究背景悬架系统的设计开发是车辆底盘开发的灵魂。
悬架系统性能是由悬架系统的运动学及弹性运动学(Kinematics and Compliance简称K&C)特性加以综合表现的。
运动学特性描述的是车轮上下跳动和转向时,车轮定位参数的变化;而弹性运动学特性则是描述悬架在承受外力及力矩作用下,车轮定位参数的一些变化特性。
悬架K&C特性是联系悬架机构设计与整车性能匹配的桥梁,对整车性能有至关重要的影响。
悬架系统设计因素包括悬架机构型式、悬架硬点布置、弹性元件及阻尼元件参数的选取等。
同时,悬架系统对于整车性能的影响又有诸多的表现型式,如悬架系统的运动学特性和弹性特性。
在传统的悬架设计开发中,更多的是依靠设计师的经验及相关数据库的支持来选择悬架系统的一些特性参数,即所谓的“Trial and Error”的方式。
在设计目标众多,约束条件众多的前提下,此方法的设计结果未必是最理想的。
悬架设计过程中的一个关键问题就是如何定量设计K&C 特性,使整车性能最优。
2、研究现状Kwon-Hee Suh[2]利用试验设计的方法对双横臂悬架在平行轮跳动时的特性做了优化;Taeoh Tak[3]等利用多体动力学方法建立了悬架模型并开发了悬架特性优化软件;Ju Seok Kang[4]等人对悬架系统进行弹性动力学分析并优化了悬架的C特性。
Fadel[5]等在车辆设计过程中采用多准则多工况的方法进行优化,分别采用蒙特卡洛方法、遗传算法及模拟退火算法对车辆的一些性能参数,主要包括尺寸及惯量特性参数,进行了优化。
J.Schuller,I.Haque和M.Eckel[6]在新车的开发过程中,以BMW参考车型为基准,利用遗传算法对底盘系统的一些关键性能参数进行了优化,包括轴距、质心位置、惯量参数、悬架刚度及阻尼特性、悬架系统K&C特性及轮胎力学特性等参数。
S.V.Bakhmutov和A.L.Karunin[7]提出在车辆的多目标优化设计中,直接优化车辆的详细设计参数,会非常耗时,比较好的办法就是采用两阶段方法来优化。
第一阶段主要关注系统特性,第二阶段关注详细的设计参数。
GOBBI,MASTINU[8]等利用动力学软件ADAMS建立了整车动力学模型,利用人工神经网络方法做全局模型近似。
优化了车辆的操作稳定性、平顺性及NVH特性。
对于操作稳定性,优化变量包括悬架衬套的刚度特性,减振器阻尼特性。
Valerio Cibrario J.D.Cuyper[9]等在车辆开发过程中,利用LMS VirtualLab及AMESim对悬架系统的刚度、阻尼及运动学特性做了优化。
Kikuo Fujita及Noriyasu Hirokawa[10]首先利用ISM(Interpretive Structural Modeling)方法对多连杆悬架的设计问题进行了分析。
M.M.CHATILLOON,L.JEZEQUEL[11]等人将悬架系统的优化分为几个层级,在不同的层级采用不同的模型来进行研究。
J.S.Hwang,S.R.Kim[12]等建立了双横臂悬架的运动学模型,并利用距离函数的方法来表征实际悬架与目标特性之间的偏差。
Hee G.Lee[13]等针对麦弗逊悬架进行了硬点位置对外倾、前束、主销后倾及主销内倾的灵敏度分析,对悬架硬点位置进行了优化。
Hosein Habibi,Kourosh H.Shirazi[14]以悬架的侧倾转向为主要研究目标,对麦弗逊悬架的设计参数进行了优化。
国内也有大量的相关研究。
文献[15]中建立了悬架系统的虚拟样机库并对某车型进行了悬架抗俯仰等特性的优化;文献[16]中利用ADAMS及Insight对多连杆悬架硬点坐标进行了优化;文献[17]中考虑了悬架设计开发中C特性的优化,主要优化橡胶衬套的刚度,并考虑了初始车轮定位参数的匹配对于直行侧向力的影响;文献[18]中利用遗传算法对五连杆悬架进行了优化,主要考虑了车轮上下跳动时车轮外倾角的变化特性。
3、悬架建模方法基于结构的悬架系统建模方法大致分为以下几种:(1)、利用多体动力学方法,采用非独立的笛卡尔广义坐标系描述刚体的姿态,并对各连接铰链做运动学约束简化,建立整个悬架系统的运动学及动力学方程并求解,以研究悬架系统的特;(2)、考虑系统的弹性,在多刚体动力学的基础上,增加弹性元件变形的模态坐标,并利用模态叠加的方法求得柔性体的变形,即所谓的刚弹耦合模型;(3)、利用机构学的方法,把悬架看成一个多连杆结构,利用图解或解析的方法来研究其特性。
4、悬架K&C特性分析4.1、悬架系统K特性分析悬架系统K特性主要包括以下几点:(1)、车轮外倾角随车轮跳动的变化;(2)、车轮前束角随车轮跳动的变化;(3)、主销内倾角及滑磨半径;(4)、主销后倾角与后倾拖距;(5)、侧倾中心;(6)、阿克曼转向关系;(7)、俯仰点头等。
4.2、悬架系统C特性分析悬架的C特性主要包括以下几点:(1)、刚度特性,包括悬架的平顺性刚度、悬架垂直刚度及悬架的侧倾刚度;(2)、侧向力引起的前束角变化;(3)、纵向力引起的前束角变化;(4)纵向力引起轮心纵向位移变化等。
悬架K&C特性众多,因而其综合设计相当复杂,很难使所有特性设计都达到最优值。
需要在各个特性之间做折中处理。
不同的设计约束条件下,各运动学特性的重要性也就有所不同。
因此在悬架系统运动学特性设计时需对各个设计目标赋予权重系数以达到优化目标。
5、悬架K&C特性优化设计5.1悬架优化目标悬架作为一个子系统,其性能的优劣必须放到整车上才能体现出来。
因此,悬架优化目标是使整车操作稳定性和平顺性最优。
5.2悬架优化变量优化变量为悬架的主要性能参数,见表5.2.1,包括悬架系统的运动学及弹性运动学特性,主销的一些定位参数,悬架系统刚度及阻尼特性等。
表5.2.1悬架主要性能参数优化既可以是优化某一参数也可以是优化某种特性。
因此,优化变量的参数化分为单一变量参数化和特性曲线变量参数化。
对特性曲线变量,如悬架刚度特性、阻尼特性、运动学特性及弹性运动学特性,进行参数化时,可采用分段线性化以及拟合曲线的方法来确定特性曲线的数学表达式。
5.3悬架优化变量初始值悬架优化变量初始值多采用参考对标车型和经验数据的方法确定。
5.4悬架优化变量约束条件对于大部分优化设计变量,充分考虑到工程上的可实现性,选取设计初值为中心,并按照初始值增减一定比例得到参数的变化范围。
特性曲线变量的约束条件通常建立在大量的试验数据基础上。
5.5悬架优化模型iSIGHT是一个优化设计的平台,它可以集成动力学分析软件、结构分析软件及数据处理软件等进行多参数、多目标协同优化,可通过响应面方法及Kriging方法等对复杂的模型进行近似以提高优化速度。
其中并集成了大量单目标优化和多目标优化的算法。
在选用模型的时候,首先应保证要求的精度。
在允许的误差范围内在选择能提高优化速度的模型。
5.6悬架优化算法iSIGHT内置多种优化算法。
针对优化变量众多和目标函数与优化变量非线性关系明显的悬架设计,常采用遗传算法。
遗传算法对一个种群进行操作,比较适合解决多目标优化问题。
遗传算法具体内容可参考文献[19]。
5.7悬架优化结果优化结果表明优化变量初值与约束条件对优化结果的优劣有很大的影响。
因此,优化变量初值与约束条件的选取在悬架优化设计中具有很重要的作用,建立合理初值与合理约束条件的选取标准或方法很有必要。
6、参考文献[1]金凌鸽.C级车悬架KnC特性优化设计方法研究[D].吉林大学博士论文,2010.[2]Kwon-Hee Suh.Optimization of front bump steer using design ofexperiments.SAE,2000-01-1617.[3]Taeoh Tak.An optimal design software for vehicle suspensionsystem.SAE Paper2000-01-1.[4]Ju Seok Kang.Elastokinematic analysis and optimization ofsuspension compliance characteristics.SAE Paper970104.[5]Fadel,Haque.Multi-criteria Multi-scenario Approaches in theDesign of Vehicle.6th World Congresses of Structural andMultidisciplinary Optimization.2005.[6]J.Schuller,I.Haque,M.Eckel.An Approach for Optimization ofVehicle Handling Behavior in Simulation.Vehicle System Dynamics Supplement37(2002),pp,24-37.[7]S.V.Bakhmutor and A.L.Karunin.Reconfigurable ManufacturingSystems and Transformable Factories.Chapter24,Spring.2005. [8]GOBBI,M,MASTING,GUGLIELMETTO.MULTI-OBJECTIVE OPTIMAL DESIGN OFROAD VEHICLE SUB-SYSTEMS BY MEANS OF GLOBAL APPROXIMATION.XIXInternational Association for Vehicle System DynamicsSymposium,Milano,Italy,August29-September2,2005.[9]Valerio Cibrario,J.D.Cuyper.Suspension analysis through reverseengineering in the vehicle development concept phase.VehicleDynamics Expo2008.[10]Kikuo Fujita,Noriyasu Hirokawa.DESIGN OPTIMIZATION OF MULTI-LINKSUSPENSION SYSTEM FOR TOTAL VEHICLE HANDLING ANDSTABILITY.AIAA-98-4787.[11]M.M.CHATILLON,L.JEZEQUEL etc.Hierarchical optimization of thedesign parameter of a vehicle suspension system.Vehicle System Dynamics Vol.44,No.11,November2006,817-839.[12]J.S.Hwang,S.R.Kim.Kinematic design of a double wishbone typefront suspension mechanism using multi-objective optimization.5thAustralasian Congress on Applied Mechanics,ACAM2007.[13]J.S.Hwang,S.R.Kim.Design Sensitivity Analysis and Optimization ofMcPherson Suspension System.Proceedings of the World Congress on Engineering2009Vol II.[14]Hosein Habibi,Kourosh H.Shirazi.Roll steer minimization ofMcPherson-strut suspension system using genetic algorithm method.Mechanism and Machine Theory43(2008)57-67.[15]蔡章林.基于VPD技术的悬架设计及整车优化[D].吉林大学博士学位论文。