多维力传感器之一:原理
三轴加速度原理

三轴加速度原理三轴加速度原理是指在三维空间中测量和计算物体的加速度。
三轴加速度原理是基于牛顿第二定律和三轴加速度传感器的工作原理。
三轴加速度传感器能够同时测量物体在x、y和z轴上的加速度,并将这些加速度信息转换成电信号输出。
三轴加速度原理的基本思想是利用三轴加速度传感器测量物体在三个不同方向上的加速度,从而得到物体的加速度矢量。
根据牛顿第二定律,物体的加速度等于物体所受的合外力除以物体的质量。
因此,通过测量物体的加速度,可以得到物体所受的合外力的大小和方向。
三轴加速度传感器通常采用微机电系统(MEMS)技术制造,其基本原理是利用微小的质量块和弹簧系统来测量加速度。
当物体受到加速度时,质量块会受到惯性力的作用而发生位移,这个位移可以通过压电效应或电容效应转换成电信号输出。
三轴加速度传感器通常由三个独立的单轴加速度传感器组成,每个单轴传感器可以测量物体在相应轴上的加速度。
通过三轴加速度传感器的组合使用,可以同时测量物体在x、y和z轴上的加速度,从而得到物体的三维加速度。
三轴加速度传感器的典型应用包括医疗设备、车辆导航、智能手机和游戏控制器等。
在医疗设备中,三轴加速度传感器可以用于监测患者的运动和姿势,从而提供给医生有关患者健康状况的信息。
在车辆导航中,三轴加速度传感器可以用于测量车辆的加速度和转弯角度,从而提供给导航系统有关车辆行驶状态的信息。
在智能手机和游戏控制器中,三轴加速度传感器可以用于检测用户的手势和动作,从而实现触摸屏幕、倾斜控制和动作感知等功能。
三轴加速度原理的研究和应用对于物体运动的测量和分析具有重要的意义。
通过利用三轴加速度传感器可以实现对物体加速度的准确测量和分析,从而可以研究物体的运动规律、判断物体的姿势和动作,并应用于各种领域的工程和科学研究中。
此外,三轴加速度传感器还可以与其他传感器(如陀螺仪和磁力计)结合使用,以实现对物体在三维空间中的运动状态的全面测量和分析。
总之,三轴加速度原理是利用三轴加速度传感器测量和计算物体的加速度的基本原理。
多维力传感器耦合分析及解耦方法的研究

多维力传感器耦合分析及解耦方法的研究曹会彬;孙玉香;刘利民;冯勇;王以俊;葛运建【摘要】Coupling is a common phenomenon in the multi-axis force sensor. If we measure the data without decoupling,it will cause incorrect operation of the robots. Aiming at coupling phenomenon, this paper analyzes the reasons why coupling exists in the multi-axis force sensor. Dividing from the causes there are two types of multi-axis force sensors, structure coupling and error coupling. We put forward a linear decoupling method based on neural network. Comparing to the traditional decoupling method,this method improves the precision of decoupling greatly. In the end of this paper,compared with the traditional decoupling method from experiments,this method was proved its effectiveness.%耦合现象普遍存在于多维力传感器中,多维力传感器输出如不经过解耦,数据直接应用到机器人操作中,会导致机器人的误操作.针对存在的耦合现象,本文首先分析了多维力存在的耦合原因,根据产生原因将耦合分为两种形式:结构耦合和误差耦合,然后提出了一种新的解耦方法-基于线性神经网络解耦方法,与传统解耦方法相比,该方法大大提高了解耦合精度.最后通过实验验证了该方法的有效性和优越性.【期刊名称】《传感技术学报》【年(卷),期】2011(027)008【总页数】5页(P1136-1140)【关键词】多维力传感器;解耦;神经网络;结构耦合;误差耦合【作者】曹会彬;孙玉香;刘利民;冯勇;王以俊;葛运建【作者单位】中国科学院合肥智能机械研究所,合肥230031;中国科学技术大学,合肥230026;中国科学院合肥智能机械研究所,合肥230031;中国科学技术大学,合肥230026;中国科学技术大学,合肥230026;中国科学技术大学,合肥230026;中国科学院合肥智能机械研究所,合肥230031;中国科学院合肥智能机械研究所,合肥230031;中国科学技术大学,合肥230026【正文语种】中文【中图分类】TP212.12多维力传感器是机器人实现智能化应用最重要的传感器之一[1-4]。
应变式力传感器原理
应变式力传感器原理
应变式力传感器利用材料的弹性变形特性来测量力的大小。
其工作原理如下:
1. 工作原理简述:
应变式力传感器由弹性材料制成,通常是金属或合金材料。
当外部施加力作用于传感器时,传感器内部的弹性材料会发生变形,而该变形会导致材料内部的应变产生变化。
2. 弹性材料的工作原理:
弹性材料具有弹性恢复能力,即当外力去除后能够恢复到初始状态。
在施加力之前,弹性材料的晶体结构处于初始状态,其晶体格子之间的距离是稳定的。
而当外力作用于材料时,晶格结构会发生略微的变化,晶体格子之间的距离会发生微小的变化。
3. 应变的产生:
当外力作用于弹性材料时,晶格结构的微小变化会导致材料内部产生应变。
应变是指单位长度的变形量,通常用应变率(单位长度的变形比例)来表示。
弹性材料的应变率与外力的大小成正比。
4. 电桥测量原理:
为了测量应变的变化,应变式力传感器通常采用了电桥测量原理。
电桥由四个电阻组成,其中一个电阻位于弹性材料上。
当材料受到外力作用时,其内部的应变发生变化,导致电阻值发生微小变化。
这会导致电桥的输出电压发生变化,从而可以通
过测量输出电压的变化来确定外界施加的力的大小。
总结:
应变式力传感器通过利用弹性材料的应变特性,测量外界施加的力的大小。
其工作原理主要包括弹性材料的应变产生和电桥测量原理。
通过测量电桥输出电压的变化,可以确定外界施加的力的大小。
多维力传感器之二:解耦

多维力传感器——技术文档之二六维力传感器解耦算法原理中国科学院合肥智能机械研究所人机工程实验室一、线性假定对于线性多维力传感器,存在如下假定,即输出电压和力值存在如下关系:⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛666564636261565554535251464544434241363534333231262524232221161514131211C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C ⨯⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛654321V V V V V V = ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛654321F F F F F F ,其中,)6,5,4,3,2,1(,),(=j i C j i 为常数。
或采用行矩阵表示为:()654321V V V V V V ⨯⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛666564636261565554535251464544434241363534333231262524232221161514131211C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C =()654321F F F F F F二、标定方程基于上述假定,六维力传感器的标定方程可表示如下:⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛666564636261565554535251464544434241363534333231262524232221161514131211d d d d d dd d d d d dd d d d d d d d d d d d d d d d d d d d d d d d ⨯⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛615141312111v v v v v v = ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛00000x F (式2-1),其中⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛615141312111v v v v v v 为仅在Fx 加力时输出; ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛666564636261565554535251464544434241363534333231262524232221161514131211d d d d d dd d d d d dd d d d d d d d d d d d d d d d d d d d d d d d ⨯⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛625242322212v v v v v v = ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛00000y F (式2-2),其中⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛625242322212v v v v v v 为仅在Fy 加力时输出; ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛666564636261565554535251464544434241363534333231262524232221161514131211d d d d d dd d d d d dd d d d d d d d d d d d d d d d d d d d d d d d ⨯⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛635343332313v v v v v v = ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛00000z F (式2-3),其中⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛635343332313v v v v v v 为仅在Fz 加力时输出;⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛666564636261565554535251464544434241363534333231262524232221161514131211d d d d d dd d d d d dd d d d d d d d d d d d d d d d d d d d d d d d ⨯⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛645444342414v v v v v v = ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛00000x M (式2-4),其中⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛645444342414v v v v v v 为仅在Mx 加力输出; ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛666564636261565554535251464544434241363534333231262524232221161514131211d d d d d dd d d d d dd d d d d d d d d d d d d d d d d d d d d d d d ⨯⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛655545352515v v v v v v = ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛00000y M (式2-5),其中⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛655545352515v v v v v v 为仅在My 加力时输出; ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛666564636261565554535251464544434241363534333231262524232221161514131211d d d d d dd d d d d dd d d d d d d d d d d d d d d d d d d d d d d d ⨯⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛665646362616v v v v v v = ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛z M 00000(式2-6),其中⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛665646362616v v v v v v 为仅在Mz 加力时输出; 三、解耦矩阵求解将标定方程(式2-1)~(式2-6),归一化并写成矩阵形式,则有:⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛666564636261565554535251464544434241363534333231262524232221161514131211d d d d d dd d d d d dd d d d d d d d d d d d d d d d d d d d d d d d ⨯⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛666564636261565554535251464544434241363534333231262524232221161514131211w w w w w w w w w w w w w w w w w w w w w w w w w w w w w w w w w w w w = ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛100000010000001000000100000010000001其中:x i i F v w /11=,y i i F v w /22=,z i i F v w /33=,x i i M v w /44=,y i i M v w /55=,z i i M v w /66= i = 1,2,3,4,5,6简记为:66⨯D ⨯66⨯W = 66⨯E66⨯E 为单位矩阵,66⨯D 定义为解耦矩阵,66⨯W 定义为耦合(标定)矩阵。
简述力敏传感器测量原理

简述力敏传感器测量原理力敏传感器是一种用于检测微小变化的传感器,其特点是它可以检测的变化量很小,甚至可以检测到毫米级的微小变化,并且精度很高,稳定可靠。
力敏传感器的测量原理是将力传递到传感器的传感元件上,然后根据传感元件的变化,通过信号放大器放大信号,再通过数据处理芯片计算出变化的量,最后将数据解码输出。
力敏传感器可以根据力种类分为压力传感器、电工磁传感器、拉力传感器、触觉传感器、微动传感器、钢丝传感器、陀螺秤传感器等。
其中,压力传感器是将被测物体的压力变化传递到传感元件上,通过变换电阻信号,放大信号,最后在压力分析仪或测量仪表中进行读出。
电工磁传感器显示出分离式电磁效应,可以测量出场及电流的变化,并将信号放大以满足解码需要。
拉力传感器可用于测量各种拉力,如杆件、线材等,并可将变形精确地转换为拉力信号,再放大后输出数据。
触觉传感器是一种用于检测触觉信号的传感器,可以检测到压力、热量、振动等信号,能够捕捉到物体的触摸状态及表面结构等信息,并转换为控制信号输出,使得自动化控制的操作更加精准和可靠。
微动传感器用于检测物体的微小运动,通过测量物体的微小运动和线性位移,检测机器的正常运行及小部件是否有松动等。
钢丝传感器能够检测到拉力传感器无法检测到的微小变化,其特别优势是一种极低的响应阻抗,可以检测到更多的变化量。
陀螺秤传感器能够检测角度和角速度变化,常用于导航及仪表系统之中。
以上就是力敏传感器测量原理的简要介绍。
当然,不同的传感器的测量原理是不同的,但是本质上都是通过将力传递到传感元件,再经过变换、放大和数据处理等步骤获得变化量,最终将数据解码输出,以供应用程序使用。
力敏传感器具有体积小、可靠性高、数字量多以及抗干扰能力强等特点,因此得到了广泛的应用。
力敏传感器的测量原理已经大大改善了传感器的功能,使得传感器更加精准、可靠,从而为各种应用提供了实用的便利。
力敏传感器在工业自动化、航空航天、机器人技术、智能家居和智能手机等领域都有着广泛的应用前景,前景十分广阔。
多维车轮力传感器及测试系统

运动的性能指标 。美 国《 & 》 R D 杂志 19 年度评选 99 出的世 界 10 0 项给工程应用研究带来巨大贡献 的奖
项中, 多维轮力测量技术就是其中的一项 , 多维轮力 测量技术在汽车上的应用主要有以下几个方面 : 11 . 汽车制动性能研究 汽车制动性是汽车的一项重要安全性能 ,利用 多维轮力测量技术进行制动 性能道路试验时 ,可 以 测量制动过程中汽车车轮所受到的地面制动力 的大 小, 从而为研究汽车的制动稳定性 、 方向操纵性 以及 制动过程中前后轴间制动力的分配等方面提供 了技 术手段 , 为改进汽车制动系统设计提供 了实验依据。 12汽车 A S的研究和评价 _ B 汽车 A S B 控制算法的 目 标是制动时制动系制动 力矩和地面制动力矩保持一定的比例关系, 从而使滑 移率尽可能处于最佳滑移率附近, 利用多维轮力测量 技术 可 以实时测 取地 面制动力 矩和制 动 系制 动力矩 , 为 A S的研究和定量分析提供了实验手段。 B 1 , 3车辆动力学 系统试验研究
一
,
目前 , 只有美国 、 国和 日本等发达国家的几家 德
公司拥有该项技术 , 且技术尚未解密。 东南大学是 国内对多维车轮力测量技 术研究 的主要 单位之一 ,9 8 19 年研制 成功 车轮转矩传感
器 ,0 4 20 年研制成功车轮三分 力传感器 ,0 5 20 年研
制成 功车轮六分力传感120 或更高 ) 以 90 ( 的波特率向外单路输 出。车 轮传感器随车轮一起转动 , 六维力数据包需经非接
触传输方式输出至非旋转部分 , 本系统采用红外传
输信号耦合方式 。 A T输出的串行码 , UR 驱动安装于 内侧轮车轴线位置 的红外发射管 , 而接收管安装于
维普资讯
基于多维力传感器的风速测量方法研究

X i q n ,U i w i U Qa i C I a e na Jn
( .Eet ncI omaina dEetcl n ie igC lg ne h n h i a t gU i rt, h n hi 0 20, hn ; 1 l r i n r t n l ra gnen ol eudrSa g a oo nv sy S ag a 2 04 C ia co f o ci E r e l f n ei
仪 受结构 、 理 、 程 等 因素 制 约 , 原 量 存在 通 用性较 差的 问题 , 别 不适合 用 于野 外长期 无人值 守的 自 特
动 气象站 。该 文基 于风 载荷 原理 , 出了一种基 于 多维 力传 感器 的新 型风速 测量仪 , 由 2个 正 交 提 它
的 弹性应 变梁组成 , 用应 变 片测量 弹性 梁 的风 载荷 , 到 风速 、 向测 量 的 目的 。 与普遍 使 用 的 采 达 风
2 nt m n c nea n ie igC lg ne ot at nvrt, a ig2 0 9 , hn ) .Is u et i c n E gnen ol eu drSuhE s U i sy N mn 10 6 C ia r S e d r e ei
Ab t a t W i d s e d i n e s ni lp r me e n t e fed o t o oo y,e vr nme tlp oe — s r c : n p e s a s e t a a tr i h l fmee r l g a i n io n a r t e to in,idu tila d a rc lu a r d ci n,a c ie t r n sra n g iu t r lp o u to r h tc u e,mii r fa r l a y af is,a d ec Re tit d b h a — t n t. srce y t e f c tr o tu t r o fsr c u e,p i c p e,me s rn a e,ec,c re ta e mee sc ntbe u e n alk n fc n rn i l a u i g r ng t u r n n mo tr a ’ s d i l i dso o — d to s s e i l tlng tr u at n e u o tc we t e tto . Ba e n p i cpls o n o d, ii n ,e p ca l a o —e m n t d d a t ma i ah rsai n y e s d o rn i e fwid la t i ril ee s a n w d a o n p e a u ig i sr me twh c p n n mu t- x sf r e s n- h s atc e r fr e i e fwi d s e d me s rn n tu n ih de e d o lia i o c e — - s t .I r e o me s r h p e n r c in o h n o s n o d rt a u e t e s e d a d die to ft e wid,t s i sr me ti d fa c u l fo — hi n tu n sma e o o p e o r t o o a lsi ta n e ms,a d a o t ta n a g s o me s r b a ’wi d o d Co a e wih h g n le a tc sr i b a n d p s sr i g u e t a u e e ms n la . mp r d t wi l s d me h nc la e mee s,i ha h h r c e itc o a tr s o s l y u e c a ia n mo t r d t s t e c a a trsi ff s e p n e,smpl sr cu e,b te i e t tr u et r e vr nme tla l a lt n t . Th e e o me t o he n w i d o n p e a u i g i sr n io n a ppi bi y a d e c c i e d v lp n f t e k n fwi d s e d me s rn n tu—
六维力传感器的原理与设计说明书ppt课件
在整堂课的教学中,刘教师总是让学 生带着 问题来 学习, 而问题 的设置 具有一 定的梯 度,由 浅入深 ,所提 出的问 题也很 明确
加载面
实验研究
标准单维力传感 器
具有中间预紧分支的力传感器样机
在整堂课的教学中,刘教师总是让学 生带着 问题来 学习, 而问题 的设置 具有一 定的梯 度,由 浅入深 ,所提 出的问 题也很 明确
在整堂课的教学中,刘教师总是让学 生带着 问题来 学习, 而问题 的设置 具有一 定的梯 度,由 浅入深 ,所提 出的问 题也很 明确
预紧式传感器的结构分析
修正后具有单一约束的球 副
预紧分支
•大大降低了关节摩擦力矩的影响 •减小了机械滞后现象
在整堂课的教学中,刘教师总是让学 生带着 问题来 学习, 而问题 的设置 具有一 定的梯 度,由 浅入深 ,所提 出的问 题也很 明确
在整堂课的教学中,刘教师总是让学 生带着 问题来 学习, 而问题 的设置 具有一 定的梯 度,由 浅入深 ,所提 出的问 题也很 明确
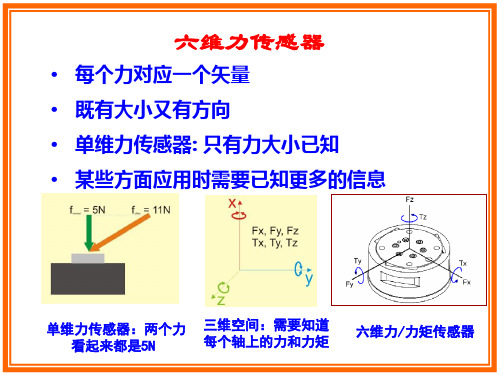
六维力传感器
• 每个力对应一个矢量
• 既有大小又有方向
• 单维力传感器: 只有力大小已知
• 某些方面应用时需要已知更多的信息
单维力传感器:两个力 三维空间:需要知道
看起来都是5N
在整堂课的教学中,刘教师总是让学 生带着 问题来 学习, 而问题 的设置 具有一 定的梯 度,由 浅入深 ,所提 出的问 题也很 明确
双层预紧式力传感器
(1)测力平台;(2) 预紧平台;(3) 测量分支;(4)球窝; (5)下平台; (6) 球窝;(7)预紧螺栓;(8)基座
在整堂课的教学中,刘教师置 具有一 定的梯 度,由 浅入深 ,所提 出的问 题也很 明确
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多维力传感器
——技术文档之一
多维力传感器
测量原理
中国科学院合肥智能机械研究所
人机工程实验室
多维力传感器测量原理
中科院合肥智能所 人机工程实验室 第 2 页 共 5 页
一 导体的电阻值
S
L
R
,其中:R为导体的长度,为导体的电阻率,L为导体
的长度,S为导体在电流方向的横截面积。
导体的电阻率与导体的材料特性有关,对已知导体来说,是一个常量。
所以,导体的电阻与导体长度成正比,与截面积成反比。
电阻应变片的工作原理是固定S,通过检测改变L来改变电阻值。
二 刚体的应变特性及其测量
由上图可以看到,在力F的作用下,悬臂状导体的A面受到拉伸,B面
受到挤压;
考虑在A、B两面分别贴上应变片,如下图
则在F力作用下,1#、2#应变片随A面一起拉伸,长度增大,3#、4#
应变片随B面一起压缩,长度将减小。
按如下方式连接时:
F
面面B
A
图1 悬臂梁受力变形
F
面面B
A
1#
2#
3#
4#
图2 应变电阻贴片示意
Vout
1#
VCC
GND
3#
4#
2#
图3 应变电阻组桥示意图
多维力传感器测量原理
中科院合肥智能所 人机工程实验室 第 3 页 共 5 页
图2中,在力F的作用下,应变梁在一定范围内的应变可以看成是线性
的,应变片紧密地粘贴在应变梁上,其长度也随之线性变化。1#,2#应变
片长度增大,电阻增大,3#,4#应变片长度减小,电阻减小;
为简化分析,下面假定1#、2#、3#、4#的电阻变化均为r。
图3中的,VCC不变时,1#、2#应变片位置上下对称,变形量相同,3#、
4#应变片位置上下对称,,变形量相同
在力F作用下,输出电压Vout按下述公式计算:
BAout
VVV
VCCRrRVCCrRrRrRVCCRRRVA
21)1()1(131
3
VCCRrRVCCrRrRrRVCCRRRVB
22)2()2(224
2
所以
VCCRrrVout
12
以上为全桥时的差分输出,对于半桥而言,相当于1-3或2-4中间有一组
是固定电阻,其输出为:
VCCRrVout
2
'
可见,无论全桥,还是半桥,其输出电压的变化与应变片的电阻变化是
呈线性的。
由前面的描述,应变片的电阻与其长度之间呈线性关系,长度与外加力F
是线性的,所以,输出电压与外加力F是线性的。而且,其线性关系在理论
上是可以计算的。
实际上,受应变片、应变梁加工、贴片工艺等的影响,这种线性关系会
发生不可预知的变化。所以,需要引入标定手段,来反推其中的比例因子。
上述原理基于悬臂梁结构给出,实际的传感器结构有各种各样的变化,
如:S梁、双孔梁、圆膜片等等。其原理都是一样的。
三 传感器的标定与测量
假定:
out
VkF
,其中:k是未知比例因子,Vout是测量出来的输出电压,
F是施加的外力。
多维力传感器测量原理
中科院合肥智能所 人机工程实验室 第 4 页 共 5 页
标定是反向操作,首先,对传感器施加已知力F0,测量其输出变化电压
Vout0,则有:00outVFk
实际使用时,由于我们在标定时,已经确定了比例因子k,所以,只要测
量出实时电压Vout,即可计算出实时力值F。
四 三维力传感器的工作原理
前面描述的是单维力传感器的测力原理。
在空间三维坐标上分别安装一个单维力传感器,即可实现三维力的测量。
实际设计制造时,由于应用要求,很少允许使用三个独立的单维力传感
器去测量三维力,而是,在结构上将三个单维力传感器合成一个整体,然后,
通过结构的、电路的、软件的处理方式分别算出三个方向的分力,再进行矢
量运算,计算合力及其方向。
传感器外形图:(某些特定型号,具体产品根据客户要求定制)
图4 部分传感器实物照片
多维力传感器测量原理
中科院合肥智能所 人机工程实验室 第 5 页 共 5 页
五:传感器信号调理与采集
信号采集部分实现的功能:传感器输出信号的放大、滤波、采集、传输,
电气原理如下:
Amplifier
S1S4D
C4C1ENB
Analog Switch
Filter
VinGNDVref D
1
D
4
Sign
ENB
ADC
B1B4V
r
e
f
G
N
D
V
o
u
t
E
N
B
DAC
Amplifier
Filter
B1B4V
r
e
f
G
N
D
V
o
u
t
E
N
B
DAC
Amplifier
Filter
B1B4V
r
e
f
G
N
D
V
o
u
t
E
N
B
DAC
MCU & Power & Interface
Sensor 2 Module
Sensor 3 Module
Sensor 4 Module
放大
AD
滤波
图5 信号采集部分电气示意图