粒子图像测速仪
粒子追踪测速(PTV)算法设计与编程实现_毕业论文
关于粒子匹配算法,目前已经有几种常见的粒子匹配方法,比如最近邻法和各种互相关的方法,互相关法如Baek和Lee1996年提出的配对几率算法,Okamoto等人1995年提出的SPG算法,Uemura等人1989年提出的BICC算法等,以及各种人工神经网络算法,如Grant和Pan1995年提出的人工神经网络算法以及Labonte1999年提出的人工神经网络算法。这些匹配算法当中,原理最简单的是当属最近邻法。但也正是因为该算法的简单性,当撒入示踪粒子的浓度比较高时,或者粒子运动的速度比较快时,很容易就发生误匹配,相应得到的速度矢量也不会正确。而人工神经网络技术的出现,使得粒子匹配的过程有可能完全自动进行,而且有可能保证较低的错误率,但这类方法需要耗费非常多的计算时间,而且有些人工神经网络实用性还不够好,但是未来PTV发展的方向应该是这种基于模式识别和人工神经网络的自动低错误率的粒子匹配方法。
PTV原理与发展历程
PTV的原理很简单,就是在流场中撒入示踪粒子,假设示踪粒子的运动准确代表了其所在流场内相应位置流体的运动,使用脉冲片光源照射流场中的一个测试平面,利用这些粒子对光的散射作用,使用成像的方法记录下流场中粒子的位置,然后对连续两帧或者多帧图像进行处理分析,得出各点粒子的位移,最后根据粒子位移和曝光的时间间隔,便可以计算出流场中各点的速度矢量,于是全流场瞬时流速就测量出来了,当然也得到流场的其他参数。在PTV技术中,当得到连续两帧或者多帧图像时,接下来最关键也是最困难的一步就是对这两帧或者多帧图像中的粒子进行正确的匹配。
激光多普勒测速仪(LDV)相位多普勒粒子分析仪(PDPA)

全息摄影与普通摄影的区别
类别
记录方式
全息摄影
物束光与参考光束
记录内容
成像介质
影像观察 方式
色彩表现 影像特点
物体散射光的强度及相位 信息
记录后称全息片 (全灰色调) 一般借助激光还原观看
彩色干涉条纹图像 三度空间立体感的景物, 只有散射光线而并无实物
一般摄影
光学镜头成像 (物束光) 景物本身或 反射光强度 感光胶片
眼睛直接观看
彩色物体图像 平面物体图像
激光全息摄影包括两步:
◇ 记录 ◇ 再现
全息记录过程
把激光束分成两束;一
束激光直接投射在感光 底片上,称为参考光束; 另一束激光投射在物体 上,经物体反射或者透 射,就携带有物体的有 关信息,称为物光束.物 光束经过处理也投射在 感光底片的同一区域上. 在感光底片上,物光束 与参考光束发生相干叠 加,形成干涉条纹,这 就完成了一张全息图。
预先标定粒 径与信号可 见度或幅值 的关系
LDV信号测粒径只能用于一些
简单、粒子浓度很低的流动
Doppler信号中的最大、最小和基底值
1.3 激光多普勒测速仪的外差检测模式
•参考光束系统:参考光直接照 射到光检测器去同散射光束进 行光学外差。
可用光阑受到严格限制,光路安
பைடு நூலகம்
排、接收光阑、粒子浓度与可达
md (m 1) 4
2sin( / 2) d R
2.2 相位多普勒测粒要点
• PD法的测量原理与光散射干涉法密切相关,即以波长作 为测量标尺。
• PDPA中两入射光束的交角较小(约5°),同时测量容积 保持较少的条纹数(5-8条),但PDPA的接收光学至少基 于2个(通常3个,可解决相位模糊问题)光电检测器。
流体动力学测量的粒子图像测速(42)

- The repetition rate of a pulsed laser is typically 10-30Hz
10
adequate only for velocities < 1 m/s
Laser Sheet
Which Laser and for what?
- Double pulsed laser (t: 1-150 s ), 10 Hz, adequate for high-speed airflow applications. - Dual head system (t: 100 ns-1s ), over 50 Hz, adequate for time resolved PIV. - Two color Laser for two-color PIV, adequate for two phase flow measurement.
Particle
7
CCD Camera
Laser sheet
8
Laser Sheet
Upper view
Laser Sheet thickness
Side view
Laser Sheet high
Thin laser sheet
out of plane movement
9
Thick laser sheet
3
What is PIV?
Flow visualization
Particle tracking velocimetry (PTV) Particle image velocimetry (PIV) Particle soeckle velocimetry (PIV)
4
Very Basic Idea Behind Optical flow measurements
第06章 流速测量2-(LDV)

v v v'v v V c cos V c
2
2
cos
2
3. 散射物的多普勒频移
从光源S发出的频率为v的 光,被物体P散射,在Q处 来观察散射光相对多普勒 频移为
v v 2V c cos sin a 2
Q
多普勒频移为
v 2V
9. 激光多普勒风速计 (Laser Doppler Velocimeter)
(一)激光风速计(LDV)的组成
1. 2.
激光器:氦氖激光器(mW)、氩离子激光器(W)
入射光学单元:将激光束分成多束互相平行的入射光,
再通过聚焦透镜聚到测量点。
3.
接收光学单元:收集运动微粒通过测量体时的散射光,
再转换成多普勒频移频率的光电流信号。
4.
多普勒信号处理器:对多普勒信号进行处理,如频率
跟踪器、计数式处理器等,将频率量转换成数字量
5.
数据处理系统:得到各种流动参数
激光风速计(LDV)的发展
1、第一代LDV (1970~1980)
光路系统为离散的光学元件,处理器为跟踪型 信号处理器,模拟输出。
2、第二代LDV (1980~2000)
LDV已经应用于火焰、燃烧混合物中流速的测量、旋转机 械中的流速测量。
特点:
动态响应快、测量准确、仅对速度敏感而与流体其他 参数(如温度、压力、密度、成分等)无关。
本节内容
6.3.0 光学和激光的基础知识 6.3.1 多普勒频移 6.3.2 激光多普勒测速原理-差动多普勒技术 6.3.3 多普勒测速的光学系统
显微粒子图像测速技术Micro-PIV研究进展

M =10 NA =0.25
2.9 4.3 9.4 18 55
M =20 NA =0.5
2.3 2.8 5.0 9.3 27
M =40 NA =0.6
2.2 2.6 4.3 7.9 23
M =40 NA =0.75
2.2 2.4 3.7 6.4 18
M =60 NA =0.1.4
2.1 2.2 2.6 3.9 10
2
面,获得 2 维粒子图像,只能实现 2 维速度测量。
v
s t
(1)
但由于微器件特征尺度十分微小,对其内部流动进行测量提出了许多新的挑战。因此,与传统 PIV 相 比,Micro-PIV 在粒子图像获取方法、示踪粒子和图像处理三方面存在较大差别[12],下面将对这三方面差 别及关键技术的最新研究进展进行介绍。
1 引言
近年来,微流动器件(Microfluidic devices)应用成为国内外研究的热点[1,2],微流动器件结构和功能也越 来越复杂,微流动器件内部的流动行为问题成为了研究的重要内容[3,4],引起来了广泛关注[5,6]。已有研究 表明,由于流动特征尺度的微小,流体分子间作用力、静电力等表面力效应相对增强,同时流动还受到微 流体器件构型、壁面粗糙度和浸润性等因素影响,微尺度流动行为表现得非常复杂,目前还无法对这些复 杂流动现象进行合理的解释[7,8]。流动可视化技术是微尺度流动研究的重要实验方法[9,10]。显微粒子图像测 速技术(Micro-scale particle image velocimetry, Micro-PIV or µ PIV)是 20 世纪 90 年代发展起来的一种微尺度 流动测量与显示技术[11],可以实现无干扰、整场、瞬态、定量的微尺度速度场测量,有效测量的尺度范围 为 0.1-100µm[12],目前已达到相当高的分辨率(<1µ m) ,测速范围从每秒数纳米到数米,成为重要的微流 动研究手段,受到了研究者的广泛关注。目前,其它的微尺度流场测速技术,如磷光显示测速[13]、光漂白 测速[14]、分子标记测速[15]和拉曼散射技术[16]等,只能获得定性研究结果,也被称作流动定性可视化研究, 其分辨率和测量精度都无法和 Micro-PIV 相比。 Micro-PIV 是在 PIV 技术基础上发展起来的,两者基本原理相同,都是通过观测流场中散布的示踪粒 子,获得两副或多幅粒子图像,并对这些粒子图像进行空间相关性分析得到流场速度[17-24]。但是由于两者 的光路设计及组成部件有重大不同,一般认为这是两种相互独立流场测速技术[12,25,26]。最早的利用示踪粒 子进行微流动可视化研究的技术也被称作微尺度粒子跟踪技术(Micro-scale particle tracking, PTV)[27],最初 被应用于生物和医学研究中[28]。利用 PTV 技术,Taylor 等人[29]和 Brody 等人[30]使用超荧光显微镜对直径 900nm 的荧光示踪粒子进行长时间照明观测,获得粒子运动轨迹图像。这种方法获得的速度场具有不准确
湍流的现代实验研究方法
湍流的现代实验研究方法作者:徐斌来源:《沿海企业与科技》2009年第09期[摘要]湍流是一种高度复杂的三维非稳态、带旋转的不规则流动,其复杂性使得其研究工作进展缓慢。
随着现代电子计算机技术和实验测量方法的进展,湍流的实验研究方法取得了重大进展。
文章简要介绍在热能工程领域使用热线热膜风速仪、激光多普勒风速仪、相位多普勒风速仪和粒子图像测速仪等测量技术对湍流进行测量和研究的应用。
[关键词]湍流;实验研究;热能工程[作者简介]徐斌,广东省电力设计研究院,广东广州,510663[中图分类号]TP27[文献标识码]A[文章编号]1007-7723(2009)09-0013-0003一、前言湍流是一种高度复杂的三维非稳态、带旋转的不规则流动,其各种物理参数都随时间与空间随机变化。
从物理结构上说,可把湍流看成是由各种不同尺度的涡旋叠合而成的流动,这些旋涡的大小及旋转轴的方向分布是随机的。
流体内部共尺度涡旋的随机运动构成了湍流的一个重要特点:物理量的脉动。
对湍流的研究已超过一百年了,人们发展出了如统计理论、边界层计算理论等多种湍流基础理论。
但因为湍流物理量的脉动特性,过去通过实验只能测得其时均值,无法测得其脉动值,所以人们至今未能掌握湍流的基本机理。
随着现代电子计算机技术和实验测量方法的进展,湍流的实验研究得到了重大进展。
特别是热线热膜风速仪、激光多普勒风速仪、相位多普勒风速仪和粒子图像测速仪等测量技术的应用,使得测量湍流流动中各物理量的脉动值成为可能。
这些先进的湍流实验研究方法,不仅被用于湍流基础理论研究,也被大量应用在工程领域的湍流流动测量,能更好地解决工程实际问题。
本文简要介绍热线热膜风速仪、激光多普勒风速仪、相位多普勒风速仪和粒子图像测速仪四种湍流实验仪器的原理及其在热能工程领域对于湍流测量和研究的应用。
二、热线热膜风速仪(HWFA)热线或热膜风速仪的敏感元件是一根细金属丝探针或敷于玻璃材料支架上的一层金属薄膜元件。
【国家自然科学基金】_粒子图像测试_基金支持热词逐年推荐_【万方软件创新助手】_20140731
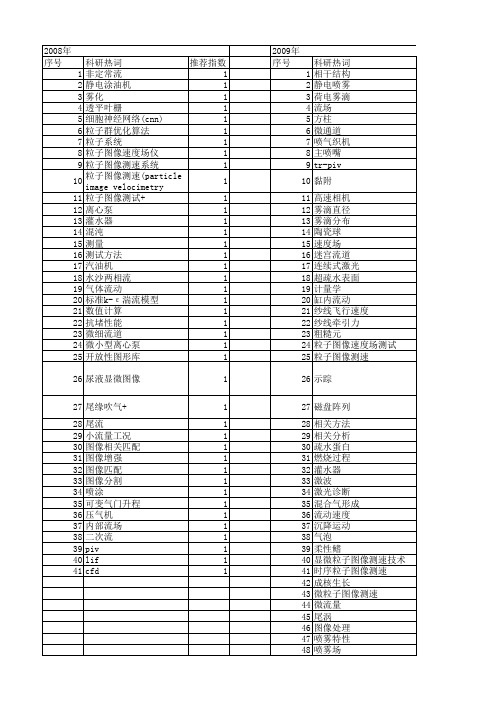
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
科研热词 推荐指数 粒子图像测速(piv) 2 定量分析 2 人工鱼礁 2 风沙流 1 颗粒速度 1 速度滑移 1 速度场 1 通用图形处理器 1 近破波 1 超疏水表面 1 荷叶表面 1 背涡流 1 组合 1 粒子滤波算法 1 粒子图像速度场测试技术 1 粒子图像速度场仪(piv) 1 破碎波浪力 1 直立堤 1 测速技术 1 流场 1 柴油喷雾 1 机器视觉 1 图像差分 1 反投影滤波 1 卷吸涡 1 上升流 1 x射线光学 1 pi线 1 piv 1 cuda 1 ct重建 1
科研热词 相干结构 静电喷雾 荷电雾滴 流场 方柱 微通道 喷气织机 主喷嘴 tr-piv 黏附 高速相机 雾滴直径 雾滴分布 陶瓷球 速度场 迷宫流道 连续式激光 超疏水表面 计量学 缸内流动 纱线飞行速度 纱线牵引力 粗糙元 粒子图像速度场测试 粒子图像测速 示踪 磁盘阵列 相关方法 相关分析 疏水蛋白 燃烧过程 灌水器 激波 激光诊断 混合气形成 流动速度 沉降运动 气泡 柔性鳍 显微粒子图像测速技术 时序粒子图像测速 成核生长 微粒子图像测速 微流量 尾涡 图像处理 喷雾特性 喷雾场 吸附 原子力显微镜 分离流 分离再附湍流
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
2008年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41
基于粒子图像测速技术(PIV)的砂箱物理模拟实验研究

基于粒子图像测速技术(PIV)的砂箱物理模拟实验研究【摘要】本研究基于粒子图像测速技术(PIV),通过砂箱物理模拟实验探究颗粒在不同特定流场下的运动规律。
在实验设计中,我们搭建了流动场装置,并通过PIV技术实时捕捉颗粒运动图像。
测速原理部分介绍了PIV技术的工作原理及应用。
在数据处理方法中描述了如何处理和分析实验数据,结果分析部分详细探讨了实验结果及颗粒运动规律。
实验验证部分通过与理论模型对比进行验证。
最后结论部分总结了实验结果,展望了PIV技术在地质工程领域的应用前景。
本研究将深入探讨颗粒在复杂流场下的运动规律,为解决地质工程中的颗粒运动问题提供理论支持。
【关键词】粒子图像测速技术(PIV)、砂箱物理模拟、实验设计、测速原理、数据处理方法、结果分析、实验验证、实验结果总结、技术应用展望、研究背景、研究意义1. 引言1.1 研究背景随着科学技术的不断进步,粒子图像测速技术(PIV)在流体力学研究中得到了广泛应用。
砂箱物理模拟实验是一种常用的流体力学实验方法,通过在实验室环境中模拟真实的地质流体运动情况,可以帮助研究人员理解地下水流、地表水流、河道水流等现象的规律。
传统的砂箱物理模拟实验存在着一些局限性,比如实验数据获取困难、测速精度低等问题。
而基于粒子图像测速技术的砂箱物理模拟实验则能够更准确地获取流体速度场信息,提高实验数据的准确性和可靠性。
本研究旨在结合粒子图像测速技术和砂箱物理模拟实验,探讨如何应用PIV技术提高砂箱实验的测速精度,以及进一步揭示地下水流或地表水流等流体运动规律。
这将为地质工程领域提供更为准确的实验数据和分析方法,具有重要的理论和实践意义。
1.2 研究意义基于粒子图像测速技术(PIV)的砂箱物理模拟实验研究具有重要的理论和应用价值。
通过这种技术可以精确地测量流体中颗粒的速度和运动轨迹,从而揭示颗粒在流场中的动力学行为和相互作用规律,为颗粒物理学和流体力学等领域的研究提供重要的实验数据。