四旋翼无人机飞控板原理
四轴 原理

四轴原理
四轴原理即为四旋翼飞行器的工作原理。
四旋翼飞行器由四个相对对称的旋翼组成,每个旋翼都由一个电动机驱动,并通过控制电路进行精确的调节。
四轴飞行器的飞行原理是通过对四个旋翼的转速进行精确控制,实现悬停、上升、下降、前进、后退、向左、向右平移以及旋转等多种飞行动作。
具体原理如下:
1. 升力平衡原理:四个旋翼产生的升力将飞行器维持在空中,飞行器的重力与升力平衡,实现悬停状态。
2. 空气动力学平衡原理:四个旋翼的转速可以通过电机转速控制器进行精确调节,进而调节各个旋翼产生的升力大小,实现空气动力学平衡。
3. 控制算法原理:通过搭载的传感器(如加速度计、陀螺仪、磁力计等)实时监测飞行器的姿态信息,将监测到的数据传输给飞行控制器。
飞行控制器根据姿态信息计算出相应的控制指令,通过电调调节四个旋翼的转速,控制飞行器的姿态。
如需向前飞行,则增加后面两个旋翼的转速,减小前面两个旋翼的转速,使飞行器倾斜向前。
类似地,对其他方向的飞行也是通过对相应旋翼转速的调节实现的。
4. 电源与电路原理:四轴飞行器通过电池为电动机提供能量,电路控制系统将飞行器的控制信号转化为电流和电压输出供电给电动机。
通过对四个旋翼的转速进行精确控制,在合适的气动力学平衡和姿态控制下,四轴飞行器能够实现精确悬停、稳定飞行及各种飞行动作,具有广泛的应用前景。
四旋翼无人机处于悬停状态的工作原理。
四旋翼无人机是一种通过四个电动马达驱动四个螺旋桨进行飞行的飞行器。
在飞行过程中,四旋翼无人机需要在空中进行悬停,使其能够稳定地悬停在一定的位置上。
下面将从工作原理、传感器和控制系统三个方面对四旋翼无人机在悬停状态下的工作原理进行详细解析。
一、工作原理1. 升力平衡在进行悬停时,四旋翼无人机需要产生与重力相等的升力,以使其能够稳定地悬停在空中。
通常情况下,四旋翼无人机通过调节四个螺旋桨的转速来产生所需的升力,以维持飞行器在悬停状态下的平衡。
2. 姿态控制四旋翼无人机在悬停过程中需要保持水平姿态以及稳定的飞行姿态,以确保其能够在空中保持稳定的位置。
为了实现姿态控制,四旋翼无人机通常配备了陀螺仪、加速度计和磁力计等传感器,以感知飞行器的姿态变化,并通过飞行控制器对螺旋桨的速度进行调节,从而实现姿态的控制和调整。
二、传感器1. 陀螺仪陀螺仪是用来感知飞行器的旋转角速度的传感器,通过测量飞行器的旋转速度,可以帮助飞行控制器对飞行器的姿态进行控制,从而实现悬停状态的平衡。
2. 加速度计加速度计可以感知飞行器的加速度和重力加速度的方向,通过感知飞行器的加速度变化,可以帮助飞行控制器对飞行器的姿态进行控制和调整,从而实现悬停状态的平衡。
3. 磁力计磁力计用来感知飞行器所处的地磁场方向,通过感知地磁场方向的变化,可以帮助飞行控制器对飞行器的姿态进行控制和调整,从而实现悬停状态的平衡。
三、控制系统1. 飞行控制器飞行控制器是四旋翼无人机的大脑,它通过接收传感器的数据,对飞行器的姿态进行感知,并通过对螺旋桨转速的调节,实现对飞行器姿态的控制和调整,从而使得飞行器能够稳定地悬停在空中。
2. 姿态控制算法飞行控制器内部通常会嵌入一些姿态控制算法,通过对陀螺仪、加速度计和磁力计等传感器数据进行融合,来实现对飞行器姿态的控制和调整,从而使得飞行器能够稳定地悬停在空中。
四旋翼无人机处于悬停状态的工作原理主要是通过调节螺旋桨的转速,实现升力的平衡,并通过姿态控制系统来保持飞行器的水平姿态和飞行姿态。
四轴飞行器的飞行原理
四轴飞行器的飞行原理
四轴飞行器是一种近年来越来越流行的无人机。
它的飞行原理虽然复杂,但是我们可以简单地理解为受力平衡和控制。
首先,四轴飞行器由四个螺旋桨驱动。
它们分成两个对称的框架,对
称轴相遇并且各有两个桨叶。
每一对桨叶都以相反的方向旋转,从而
产生向上或向下的扭矩。
由于这些旋转后的力量可以在任何方向上表
现出来,并且由于它们可以以不同的速度旋转,四轴飞行器的飞行方
向可以被完全控制。
其次,四轴飞行器利用陀螺仪、加速度计和地磁仪等设备来保持平衡。
陀螺仪可以测量飞行器的转动速度,从而帮助控制器调整螺旋桨的转
速以实现平衡。
加速度计可以测量加速度,以检测飞行器的位置。
地
磁仪则可以检测磁场方向,从而确定飞行器的方向。
最后,四轴飞行器还需要一个控制器来运行上述设备。
控制器接收从
各种传感器收集的数据,并根据设定参数进行计算。
控制器将计算结
果发送给电调,以使螺旋桨转速实现平衡和控制。
综上所述,四轴飞行器的飞行原理可以概括为通过四个螺旋桨的力量
实现受力平衡,并利用陀螺仪、加速度计和地磁仪等设备保持平衡,
再通过控制器控制螺旋桨的转速实现飞行方向的控制。
四轴飞行器的飞行原理非常复杂,需要多种装置和设备的协同作用,以实现高度自由的空中飞行。
四轴飞行器控制原理简单介绍
四轴飞行器控制原理简单介绍1.姿态控制姿态控制是指控制四轴飞行器所处的空中姿态,包括横滚、俯仰和偏航。
横滚是指四轴飞行器以机体中心线为轴心向左或向右旋转;俯仰是指四轴飞行器以机体前后中心线为轴心向前或向后倾斜;偏航是指四轴飞行器以竖直轴为轴心旋转。
姿态控制可以通过四个电动马达间的配合来实现。
例如,当四轴飞行器需要向左旋转时,右侧的两个电动马达通过提高转速而左侧的两个电动马达通过降低转速,使得产生的升力不均衡,从而导致飞行器向左旋转;同样的原理,可以实现向右、向前和向后的倾斜,从而实现横滚和俯仰的控制。
偏航控制则是通过改变对角电动马达的转速来实现的。
2.高度控制高度控制是指控制四轴飞行器的飞行高度。
通常,四轴飞行器通过改变电动马达的转速来控制升力,从而控制飞行高度。
当需要升高时,四个电动马达的转速同时提高,产生更大的升力,使得飞行器上升;当需要下降时,四个电动马达的转速同时降低,减小升力,使得飞行器下降。
3.位置控制位置控制是指控制四轴飞行器在空中的位置,通常使用GPS、惯性导航系统(INS)和视觉系统来获取实时位置信息,并通过控制四个电动马达的转速来调整飞行器的位置。
位置控制通常采用反馈控制的方法,在测量到的当前位置与目标位置之间存在偏差时,通过调整电动马达的转速来减小偏差,并使飞行器逐渐趋向于目标位置。
综上所述,四轴飞行器的控制原理涉及到姿态控制、高度控制和位置控制三个方面。
通过控制四个电动马达的转速来实现姿态控制和高度控制,通过GPS、INS和视觉系统来获取位置信息,并通过反馈控制来调整飞行器的位置。
这些控制原理的运用使得四轴飞行器能够实现精准、稳定的飞行。
四旋翼飞行器无人机结构和原理
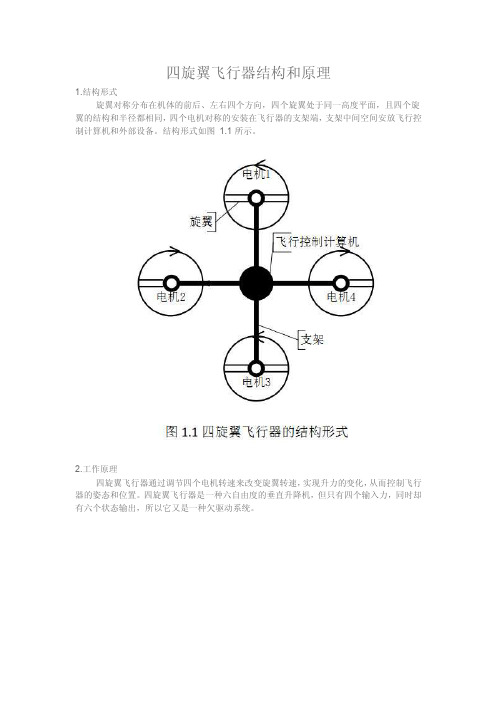
四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。
结构形式如图 1.1所示。
2.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在上图中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
(1)垂直运动:同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
(2)俯仰运动:在图(b)中,电机1的转速上升,电机 3 的转速下降(改变量大小应相等),电机2、电机 4 的转速保持不变。
由于旋翼1的升力上升,旋翼 3 的升力下降,产生的不平衡力矩使机身绕y 轴旋转,同理,当电机1 的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
(3)滚转运动:与图b 的原理相同,在图 c 中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x 轴旋转(正向和反向),实现飞行器的滚转运动。
多旋翼无人机的原理

多旋翼无人机的原理
多旋翼无人机是一种通过多个旋翼来产生升力和控制飞行的飞行器。
其原理基于飞行器在空气中产生升力,并通过改变旋翼的转速和姿态来控制飞行方向。
多旋翼无人机通常由一个或多个旋翼组成,每个旋翼由一个电动马达驱动,通过螺旋桨产生向上的推力。
这些旋翼安装在飞行器的平衡板上,通过控制各个旋翼的转速和提升力分配来实现飞行。
在飞行过程中,通过调整各个旋翼的转速,可以使飞行器在空中悬停、上升或下降。
通过改变旋翼的倾斜角,可以实现向前、后、左、右等方向的飞行。
旋翼的倾斜角度可以通过改变飞行器的姿态来实现,通常通过控制机身前后倾斜、左右倾斜和偏航来控制。
多旋翼无人机还可以通过配备陀螺仪和加速度计等传感器来实现自稳定和姿态控制。
陀螺仪可以感知飞行器的姿态变化,通过自动调整旋翼的转速来保持平衡。
加速度计可以感知飞行器的速度和加速度变化,通过自动调整旋翼的转速来保持稳定飞行。
此外,多旋翼无人机还可以通过配备GPS导航系统来实现自
动导航和定位。
通过GPS系统,飞行器可以获取自身的位置
信息,并根据预设的航点来自动飞行。
总之,多旋翼无人机通过调整旋翼的转速和姿态来实现升力和
飞行控制。
搭配各种传感器和导航系统,可以实现自稳定、自动导航和定位等功能,广泛应用于航拍、物流、农业等领域。
无人机驾驶员航空知识手册培训教材(多旋翼)
四轴飞行器的机架,必须要符合飞行器的结构基础,能够保 持对称稳定性。
另外需要注意的是四根轴架的尺寸长度,保证4个螺旋桨不打 架就可以了,但要考虑到螺旋桨之间因为旋转产生的乱流互相影 响,建议还是不要太近,否则影响效率。 这也是为什么四轴用2 叶螺旋桨比用3叶螺旋桨多的原因之一(3叶的还有个缺点,平衡 不好做)。
四旋翼飞行器
精选
四旋翼飞行器
精选
四旋翼飞行器
精选
四旋翼飞行器
精选
四旋翼飞行器
精选
精选
四旋翼飞行器
精选
精选
四旋翼飞行器
电调:
电调都会标上多少A,如20a电调就是电子调速器。电 调的作用就是将飞控板的控制信号,转变为电流的大小, 以控制电机的转速,因为电机的电流是很大的,通常每个 电机同时正常工作时,如果没有电调的存在,飞控板根本 无法承受这样大的电流(另外也没驱动无刷电机的功能) 。同时电调在四轴当中还充当了电压变化器的作用,将电 压变为5v为飞控板和遥控器供电,40a这个数字就是电调 能够提供的电流。大电流的电调可以兼容用在小电 流的地方。小电流电调不能超标使用。
入流角 γ:入流和旋转面之间的夹角
φ
桨弦
精选
α
相对气 流
γ 旋转面
四旋翼飞行器
飞行中,螺旋桨是一面旋转一面前进的。螺旋 桨剖面具有两个速度:一个是前进速度v,一个是 圆周速度(切向速度)u。
右图为桨叶切 面上某一点的运动 轨迹
精选
43
精选
四旋翼飞行器
飞控板:
飞控板就是飞行器的大脑,如果没有飞控板,四轴飞行器就 会因为安装、外界干扰、零件之间的不一致型等原因形成飞行 力量不平衡,后果就是左右、上下的胡乱翻滚,根本无法飞行 ,飞控板的作用就是通过飞控板上的陀螺仪,对四轴飞行状态 进行快速调整,如发现右边力量大,向左倾斜,那么就减弱右 边电流输出,电机变慢,升力变小,自然就不再向左倾斜。
无人机的组成部分
旋翼无人机的组成部分1、动力系统(1)电动机小型四旋翼无人机(轴距250mm左右)大都选用KV2000左右(配5-6寸桨)的电机。
(2)电子调速器电子调速器用于驱动无刷直流电机,比较重要的参数是工作电流,刷新频率,重量。
一般而言,当前市场上的大部分电子调速器的刷新频率都大于400hz。
(3)电调连接板电调连接板,其本质为一块电源配电板,用于简化电池与电调、电调与飞控之间的电气连接,同时可以避免导线拆装时的反复焊接。
(4)桨叶桨叶与电机的搭配主要是从机架大小、能否提供足够动力这两方面进行考虑。
(5)电池现在几乎所有的四旋翼无人机都使用锂电池,主要考量电池的容量、放电速率、自身重量。
如:ACE格瑞普2200mAh锂电池,充电倍率20C,重量186g,尺寸25mm*34mm*105mm2、支撑和外观系统支撑和外观系统(机架)是指无人机的承载平台,所有设备都是用机架承载起来飞上天上的,所以无人机的机架好坏,很大程度上决定了这部无人机的使用寿命。
衡量一个机架的好坏,可以从坚固程度、使用方便程度、元器件安装是否合理等等方面考察。
现在常见的无人机,多数指多轴飞行器的形式,机架的组成大同小异,主要由中心板、力臂、脚架组成,有结构简单的特点。
多轴飞行器的轴数,从两轴开始,到十多轴都有,但常见的还是以4、6、8轴为主。
轴数越多、螺旋桨越多、机架的负载就越大,但相对地结构也就变得越复杂。
3、飞控制系统(1)飞控原理四旋翼飞行器的控制系统分为两个部分:飞行控制系统和无刷直流电机调速系统。
飞行控制系统通过IMU惯性测量单位(由陀螺传感器和加速度传感器组成)检测飞行姿态,通过无线通讯模块与地面遥感器通讯。
4个无刷直流电机调速系统总线与飞行控制器通信,通过4个无刷直流电机的转速来改变飞行姿态,整个系统采用低压电池供电。
四旋翼飞行器是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力部稳定,所以需要一种能够长期保稳定的控制方法。
多旋翼无人机操控原理
多旋翼无人机操控原理
多旋翼无人机的操控原理是通过遥控器发送信号,控制飞行器上的电机输出转速和转向来改变飞行方向、高度和姿态。
一个典型的多旋翼无人机有四个电机和四个螺旋桨,分别位于飞行器的四个角落。
每个电机控制一个螺旋桨,通过加速或减速旋转来产生向上或向下的力矢量、向左或向右的力矢量,以及绕飞行器垂直轴线旋转的力矢量,从而实现飞行器的姿态调整、远距离飞行等操作。
无人机的操控主要有三个方面:
1.姿态控制:通过电机输出转速和转向来控制飞行器的姿态,包括向前、向后、向左、向右、旋转等动作。
2.高度控制:通过调整电机输出的转速来控制飞行器的升降高度。
3.方向控制:通过调整电机输出的转向来控制飞行器的方向,包括向左、向右、向前、向后等方向。
无人机结构与系统课件:无人机结构与飞行原理
1.2.3飞行控制
图1-12 俯仰运动
3.滚转运动、侧向运动(左右运动)
与图1-12的原理相同,在图1-13中,改变电机2和电机4的转 速,保持电机1和电机3的转速不变,则可使机身绕x轴旋转(正 向和反向),实现四旋翼无人机的滚转运动。同时,四旋翼无 人机首先发生一定程度的倾斜,从而使螺旋桨升力产生水平分 量,因此可以实现四旋翼无人机的侧向飞运动。例如,电机4的 转速上升,电机2的转速下降,电机1和电机3的转速保持不变, 无人机左滚,向左运动。
表1-1 电机与螺旋桨的搭配
1.2.1 结构组成
6. 飞行控制系统
飞行控制系统是多旋翼无人机的核心设备,飞控系统的好坏从本质上决定了无人机 的飞行性能。飞行控制系统集成了高精度的感应器元件,主要由陀螺仪(飞行姿态感 知)、加速计、角速度计、气压计、GPS及指南针模块(可选配)以及控制电路等部件 组成。通过高效的控制算法,能够精准地感应并计算出无人机的飞行姿态等数据,再通 过主控制单元实现精准定位悬停和自主平稳飞行。根据机型的不一样,可以有不同类型 的飞行控制系统,有支持固定翼、多旋翼及直升机的飞行控制系统。
(2)KV值
图1-6 电机
在无刷电机的铭牌上还有一组数字,如 KV950,如图 1-6 所示。用它来表示当电机的输入电压增加 1 伏特,无刷电机空转转 速增加的转速值,单位是“转速/伏特”(RPM/V)。例如KV950 电机,外加 1V 电压,电机空转时每分钟转 950 转;外加 2V 电压,电机的空转转速就 1900 转/分;电压为 10V 的时候,电机的空转转速达到 9500 转/分。单从 KV 值,不可以评价 电机的好坏,因为不同 KV 值适用不同尺寸的螺旋桨。KV 值小的电机的绕线匝数更多更密,能承受更大的电流,所以可以产 生更大的扭矩去驱动更大尺寸的螺旋浆;相反,KV 值大的电机的绕线匝数少,产生的扭矩小,适合驱动小尺寸的螺旋浆。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四旋翼无人机飞控板原理
四旋翼无人机飞控板是无人机的核心控制系统,它负责控制无人机的飞行姿态、导航、稳定性等功能。
下面将详细介绍四旋翼无人机飞控板的原理。
四旋翼无人机飞控板主要由传感器、处理器、执行器和通信模块等组成。
传感器用于获取无人机当前的状态信息,包括加速度、陀螺仪、磁力计等。
处理器是无人机的大脑,负责接收传感器数据并进行计算和决策。
执行器包括电机和舵机,用于控制无人机的飞行姿态。
通信模块则负责与地面站或其他设备进行数据传输和通信。
四旋翼无人机飞控板的工作原理如下:
1. 姿态测量:飞控板通过加速度计和陀螺仪等传感器获取无人机的姿态数据,包括横滚、俯仰和偏航角等。
通过姿态测量,飞控板能够了解无人机当前的飞行状态。
2. 控制算法:飞控板通过内部的控制算法对姿态数据进行处理和计算,生成相应的控制指令。
控制算法主要包括PID控制器等,用于控制无人机的飞行姿态。
3. 控制指令生成:飞控板根据控制算法生成的控制指令,通过电调控制电机的转速,从而控制无人机的飞行姿态。
电调是连接电机和飞控板的重要组件,它负责将控制信号转化为电机转速的控制。
4. 传感器融合:飞控板通过传感器融合算法将不同传感器获取的数据进行融合,提高无人机的飞行稳定性和精确性。
传感器融合算法可以利用卡尔曼滤波等技术,将不同传感器的优势进行结合,减少误差和噪音对飞行控制的影响。
5. 导航和定位:飞控板通过GPS等导航模块获取无人机的位置信息,实现自主导航和定位功能。
导航和定位是无人机飞行的关键,它能够实现无人机的航线规划、航点飞行等功能。
6. 数据传输和通信:飞控板通过通信模块与地面站进行数据传输和通信,实现遥控和监控功能。
通信模块可以采用无线电、蓝牙、Wi-Fi等技术,将无人机的状态信息和控制指令传输给地面站,同时接收地面站的指令和数据。
总结起来,四旋翼无人机飞控板是无人机的核心控制系统,通过传感器获取无人机的状态信息,通过处理器进行计算和决策,通过执行器控制无人机的飞行姿态,通过通信模块与地面站进行数据传输和通信。
飞控板的原理主要包括姿态测量、控制算法、控制指令生成、传感器融合、导航和定位、数据传输和通信等。
通过飞控板的工作,无人机能够实现稳定的飞行、精确的导航和定位等功能,广泛应用于航拍、物流、农业等领域。