三相异步电动机的电力拖动
电机及拖动PPT课件

A、增大励磁电流
B、减小励磁电流
C、保持励磁电流不变 D、使励磁电流为零
答案: C
2.2.2 反接制动
*电压反接制动 电压反接制动时接线如图所示。
开关S投向“电动”侧时,电枢接正极
电压,电机处于电动状态。进行制动时,开
关投向“制动”侧,电枢回路串入制动电R阻B 后,接上极性相反的电源电压,电枢回路内
定义:当 U 、U N I f时,I fN n f(I a )
由方程式可得
n
UN CeΦ
Ra CeΦ
Ia
Tn
Tem
n
T2
T0
0
Ia
)。 A、n=(U-IaRa)/Ceφ B、n=(U+IaRa)/Ceφ C、n=Ceφ/(U-IaRa) D、n=Ceφ/(U+IaRa) 答案: A
第二章直流电动机的电力拖动
电机及拖动
绪论 第一章 直流电机 第二章 直流电动机的电力拖动 第三章 三相异步电动机 第四章 三相异步电动机的电力拖动
为什么要学电机?
请同学们就电机的相关应用举例。
绪论
电机是利用电磁感应原理工作的机械。 电机常用的分类是按功能分,有发电机、电动机、变压器和 控制电机四大类;
归纳如下:
电机
变压器 直流电机
把电刷A、B接到直流电源 力形成逆时针方向的电磁转矩。
上,电刷A接正极,电刷B接负 当电磁转矩大于阻转矩时,电机
极。此时电枢线圈中将电流流过。转子逆时针方向旋转。
当电枢旋转到右图所示位置时
原N极性下导体ab转到S极下, 受力方向从左向右,原S 极下 导体cd转到N极下,受力方向 从右向左。该电磁力形成逆时 针方向的电磁转矩。线圈在该 电磁力形成的电磁转矩作用下 继续逆时针方向旋转。
电机与拖动
答:电磁转矩方向改变,电机旋转方向不变。
第二章 直流电动机的电力拖动
自测题参考答案
(一)填空题: 1. 他励直流电动机的固有机械特性是指在U=UN、Φ= ΦN,电 枢回路不串电阻的条件下,n和Tem的关系。 2. 直流电动机的起动方法有降压起动、电枢回路串电阻起动。 3. 如果不串联制动电阻,反接制动瞬间的电枢电流大约是能耗 制动瞬间电枢电流的2倍。 4. 当电动机的转速超过理想空载转速时,出现回馈制动。 5. 拖动恒转矩负载进行调速时,应采用降压或电枢回路串电阻 调速方法,而拖动恒功率负载时应采用弱磁调速方法
时一次、二次绕组电流均为额定值,铜损耗也达到正常运行时的数值,而电 压大大低于额定电压,铁心中磁通密度也大大低于正常运行时的数值,此时 铁损耗与铜损耗相比可以忽略不计。因此短路损耗可近似看成为铜损耗。 2. 电源频率降低,其他量不变,试分析变压器铁心饱和程度、励磁电 流、励磁电抗和漏抗的变化情况。 答:据U1≈4.44ƒN1Φm可知,当ƒ降低时, Φm(Bm)增加,铁心饱和 程度增加,励磁电流增加励磁电抗减小,漏抗减小。
② 随着Ia增加,电枢反应附加去磁作用增强,使磁通Φ 减少,电枢电动势Ea减少,最后使U下降。 并励:影响因素有三个
① 随着Ia增加,IaRa增加,使U下降; ② 随着Ia增加,电枢反应附加去磁作用增强,使磁通Φ 减少,电枢电动势Ea减少,最后使端电压U下降; ③ 而端电压U下降,又使If下降,磁通Φ下降,电枢电动 势Ea阿进一步减少,端电压U进一步下降。
子电流的频率相同。( √ )
(三)选择题: 1. 若在三相对称绕组中通入i =I sinωt,i =I sin(ωt+120 ), i =I sin(ωt-120 )的三相电流,当 ωt=210o时,其三相基波合成磁动势的幅值位于:( ③ )
第一章变压器

四、变压器的基本结构
由铁心、绕组、油箱、Байду номын сангаас缘套管及附件组 成。 1.铁心 铁心是变压器的磁路,由铁心柱和铁轭两 部分组成.铁心柱上安放绕组,铁轭使磁路闭 合. 由两面涂有绝缘漆的硅钢片叠成.有心式 和壳式两种结构.
2.绕组 绕组是变压器的电路,它由绝缘扁导线或圆 导线绕成,多为铜或铝线.高低压绕组均绕在 同一铁心 柱上,低压绕组在里侧靠铁心,以利 绝缘.
电能
(U1、I1)
磁场能
(变化的磁场)
电能
( U2、I2)
理想变压器的规律
原、副线圈中产生的感应电 动势分别是: E1=n1/ t E2=n2/ t U1=E1 U2=E2
I1
I2 n2 U2
U1 n1
E1 n1 E2 n2
U1 n1 U 2 n2
若不考虑原副线圈的内阻
(1) 理想变压器原副线圈的端电压之 比等于这两个线圈的匝数之比
变压器一次和二次绕组的电压比可认为是二者的 匝数比k U1 E1 N1 k U 20 E2 N 2
(三)空载电流i0 I0的主要作用是在磁路中产生磁动势建立磁通. 故又称励磁电流. i0的波形:
差900相位角,是纯无功分量.为磁化电流. Iμ与 E 1
Ih与
E 1
同相位,是一个有功分量,对应铁损.
U1 n1 U 2 n2
n2 >n1 U2>U1 ---升压变压器
n2 <n1 U2 <U1 ---降压变压器
理想变压器输出功率应等于输入功率
即:
P 出 = P入
U1I1=U2I2
I 1 U 2 n2 I 2 U 1 n1
(2)理想变压器原副线圈的电流跟它 们的匝数成反比
电力拖动ppt课件

目 录
• 电力拖动概述 • 电力拖动系统的电动机 • 电力拖动系统的控制电路 • 电力拖动系统的应用实例 • 电力拖动系统的维护与故障排除
01
电力拖动概述
定义与原理
定义
电力拖动是指利用电动机作为原 动机来拖动生产机械的工作机构 使之运转的一种方法。
原理
利用电动机产生的转矩和转速, 通过传动机构来驱动生产机械的 工作机构运转。
电力拖动系统能够精确控制生产线的速度、位置和运动轨迹,提高生产效率和产品 质量。
工业自动化生产线通常需要高可靠性和高稳定性的电力拖动系统,以确保生产线的 正常运行和生产安全。
电梯控制系统
电梯是电力拖动系统在垂直运 输领域的典型应用,通过电机 驱动曳引绳或链条实现升降运 动。
电力拖动系统能够精确控制电 梯的速度和位置,提供安全、 舒适、高效的运输服务。
按控制方式分类
手动控制、半自动控制和自动控制等 。
机械传动、液压传动和气压传动等。
02
电力拖动系统的电动机
电动机的种类与特点
直流电动机
具有良好的调速性能, 适用于需要平滑调速的 场合。但结构复杂,维
护成本高。
交流电动机
结构简单,维护方便, 但调速性能较差。常见 的有异步电动机和同步
电动机。
伺服电动机
应确保所选电动机符合安全标准,并具有 必要的安全保护功能。
03
电力拖动系统的控制电 路
控制电路的组成与原理
组成
控制电路主要由控制电器、保护电器和测量仪表组成,用于实现对电动机的启 动、调速、制动和反向等控制操作。
原理
通过控制电路中的电器元件,实现对电动机的电源通断、调速和转向的控制, 从而达到生产工艺的要求。
《电机原理及拖动》交流部分习题答案要点

第五章 三相异步电动机原理5-1 什么是空间电角度,它与空间几何角度有什么关系?答:一个圆的空间几何角度(也称机械角度)是360度。
但从电磁的观点来说:电机转子在旋转时每经过一对磁极,其绕组感应的电量(如感应电动势)就相应地变化一个周期,因此,将一对磁极对应的空间几何角度定义为360度电角度。
空间电角度与电机的极对数P 有关,即:空间电角度=空间几何角度⨯P 。
例:一台6极异步电机(P=3),其转子转一周就经过3对磁极,转子绕组中感应电动势交变3个周期,即:空间电角度=360⨯3=1080度电角度。
5-2 绕组的短矩和分布为什么能消减高次谐波? 答:短距系数:基波: ⎥⎦⎤⎢⎣⎡︒⋅=90sin τy k y 谐波:⎥⎦⎤⎢⎣⎡︒⋅⋅=90sin τννyk y 短距对于基波电动势的影响很小,但对于高次谐波的短距系数可能很小,甚至为零,因此,短距能有效地消减高次谐波。
分布系数:基波:⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛=2sin 2sin ααq q k p谐波:⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛=2sin 2sin νααννq q k p相临元件所夹空间电角度对基波来说是α,对于ν次谐波则为να,因此相临元件的ν次谐波电动势相位差很大,完全可能使相量和大为减小,甚至为零。
所以,分布能有效地消减高次谐波。
5-3 何谓相带,在三相电机绕组中为什么常采用600相带,而很少采用1200相带? 答:按每相绕组在圆周上连续占有空间的电角度(俗称相带)分类:有120°相带、60°相带和30°相带等绕组。
通常三相交流电机采用 60°相带绕组。
在相同串联导体数下,60°相带绕组感应电动势约比120°相带绕组的感应电动势大 15%以上。
30°相带绕组虽然可以进一步提高绕组利用率,但由于其绕组制造复杂,而感应电动势提高不多,故仅用在一些有特殊要求的场合,例如用于高效率电动机中。
电力拖动教案:《变压器同名端判断和三相异步电动机首尾端判别》

《变压器同名端判断和三相异步电动机首尾端判别》教案任课教师授课班级课时安排本期授课次序课题内容变压器同名端判断和三相异步电动机首尾端判别教学目的1、掌握变压器同名端的判别方法2、掌握三相异步电动机首尾端的判别方法教学重点变压器同名端判断和三相异步电动机首尾端判别教学难点变压器同名端判断和三相异步电动机首尾端判别课型实习课教学方法与手段讲解法、演示法、现场实习法教学过程设计教学过程及时间分配教学内容课前准备1.准备实习设备、材料及教学用具;2.检查学生出勤情况,工具及劳动保护穿戴情况;3.集中学生注意力,准备讲授教学内容。
安全教育 1.集体背诵安全操作规程;2.正确使用电工工具及仪表;3.按操作规程要求正确操作电器设备的运行。
一、变压器同名端的判别1、观察法观察变压器一次侧,二次侧绕组的绕向,应用楞次定律、安培定则来判别例如A与a是同名端;X与x是同名端2、直流法在无法辨清绕组方向时,可以用直流法来判别变压器同名端。
用1.5V或3V的直流电源,直流电源接入高压绕组,直流毫伏表接入低压绕组。
当合上开关一瞬间,如毫伏表指针向正方向摆动,则接直流电源正极的端子与接直流毫伏表正极的端子是同名端。
3、交流法将高压绕组一端用导线与低压绕组一端相连接,同时将高压绕组及低压绕组的另一端接交流电压表。
例如:在高压绕组两端接入低压交流电源,测量U1和U2值,若U1>U2,A与a是异名端,若U1<U2,A与a是同名端。
二、异步电动机首尾端判别1、交流法(1)首先用万用表查明每相绕组的两个出线端(2)然后把其中任意两相绕组串联后与电压表连接,第三相绕组与36V交流电源接通,若电压表有读数,则是首位相连;若电压表没有读数,则是首首(尾尾)相连。
2、万用表发(1)明每相绕组的两个出线端(2)用手转动电动机转子,如万用表的指针不动,说明首尾接线正确;如万用表的指针动,说明首尾接线错误。
3、干电池法(1)首先用万用表查明每相绕组的两个出线端(2)按图接线,闭合开关的瞬间,若微安表指针摆向大于零的一侧,则连接电池正极的接线端与微安表负极所连接的连线端同为首端(尾端)。
电力拖动与控制课后答案
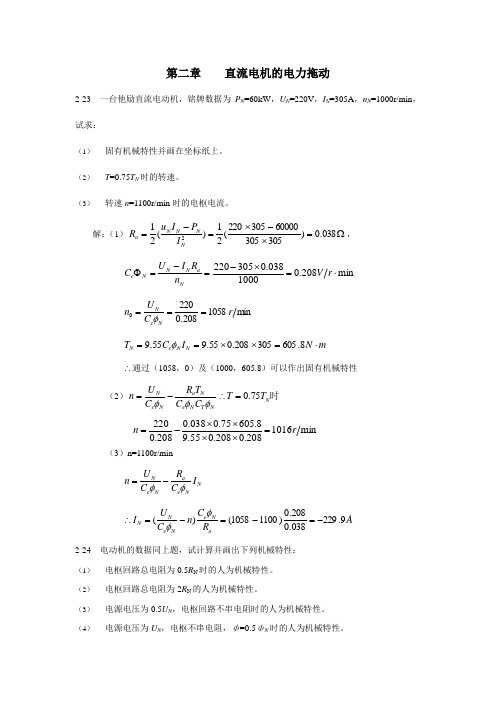
第二章 直流电机的电力拖动2-23 一台他励直流电动机,铭牌数据为P N =60kW ,U N =220V ,I N =305A ,n N =1000r/min ,试求:(1) 固有机械特性并画在坐标纸上。
(2) T =0.75T N 时的转速。
(3) 转速n =1100r/min 时的电枢电流。
解:(1)Ω=⨯-⨯=-=038.0)30530560000305220(21)(212N N N N a I P I u R , =-=ΦNa N N N e n R I U C min 208.01000038.0305220⋅=⨯-r V min 1058208.02200r C U n N e N ===φ m N I C T N N e N ⋅=⨯⨯==8.605305208.055.955.9φ∴通过(1058,0)及(1000,605.8)可以作出固有机械特性(2)时N NT N e Na N e N T T C C T R C U n 75.0=∴-=φφφ min 1016208.0208.055.98.60575.0038.0208.0220r n =⨯⨯⨯⨯-=(3)n=1100r/minN Ne a N e N I C RC U n φφ-=A R C n C U I a N e N e N N 9.229038.0208.0)11001058()(-=-=-=∴φφ 2-24 电动机的数据同上题,试计算并画出下列机械特性:(1) 电枢回路总电阻为0.5R N 时的人为机械特性。
(2) 电枢回路总电阻为2R N 的人为机械特性。
(3) 电源电压为0.5U N ,电枢回路不串电阻时的人为机械特性。
(4) 电源电压为U N ,电枢不串电阻,ф=0.5фN 时的人为机械特性。
注:R N =U N /I N 称为额定电阻,它相当于电动机额定运行时从电枢两端看进去的等效电阻。
解:(1)Ω===721.0305220N N N I U R 当外串后总电阻为0.5R n 时:T T C C R C U n NT N e nN e N 874.010585.0-=⋅-=φφφ (2)当电枢总电阻为Ω=442.12n R 时:T T C C R C U n NT N e nN e N 49.310582-=⋅-=φφφ (3)N U U 5.0=T T C C R C U n N T e aN e N 092.0529)(5.02-=-=φφ (4)N φφ5.0=T T C C R C U n N T e aN e N 368.02116)(25.05.02-=-=φφ2-25 Z2—71型他励直流电动机,P N =7.5kW , U N =110V , I N =85.2A , n N =750r/min ,R a =0.129Ω。
三相异步电动机械特性及各种运行状态
n
n0
a1
O
T
-n0
机械功率Pm
第 十 章 异步电动机的电力拖动
(2) 转子反向的反接制动 ——下放重物
① 制动原理
n
定子相序不变,转子 电路串联对称电阻 Rb。 低速提 a 点 惯性 b 点(Tb<TL),升重物
n↓ c 点 ( n = 0,Tc<TL )
n0
a
b
e TL
Oc
1 T
在TL 作用下 M 反向起动
由参数表达式可知,改变定子电压U1、 定子频率f1、极对数p、定子回路电阻 r1和电抗x1、转子回路电阻r2ˊ和电抗 x2ˊ,都可得到不同的人为机械特性。
(1)降低定子电压的人为机械特性
在参数表达式中,保持其它参数不变, 只改变定子电压U1的大小,可得改变 定子电压的人为机械特性。
讨论电压在额定值以下范围调节的人 为特性(为什么?)
Pe = m1—I2'—2 R定2'子+s 发Rb出'<电0功率,向电源回馈电能。
Pm=
(1-s ) ——
轴Pe上<输0入机械功率(位能负载的位能)。
PCu2 = Pe-Pm
|Pe | = |Pm|-PCu2
—— 机械能转换成电能(减去转子铜损耗等)。
第 十 章 异步电动机的电力拖动
制动效果 Rb →下放速度 。
第 十 章 异步电动机的电力拖动
(3) 能耗制动过程 —— 迅速停车 2
① 制动原理
b
n
a1
制动前:特性 1。
制动时:特性 2。
a 点 惯性 b 点 (T<0,制动开始)
O TL
T
n↓ 原点 O (n = 0,T = 0),制动过程结束。