履带伸缩臂起重机有限元模态对比分析
电动履带起重机伸缩臂受力分析
电动履带起重机伸缩臂受力分析
郭柏树;柳海芳;蒋伟
【期刊名称】《建设机械技术与管理》
【年(卷),期】2024(37)3
【摘要】本文以FWT100电动伸缩臂起重机为载体简单介绍了伸缩臂的结构组成和伸缩原理,通过有限元分析法,对伸缩臂进行强度和刚度分析,将计算结果与实验数据进行比较,确定了有限元法在吊臂计算中的可行性。
【总页数】2页(P30-31)
【作者】郭柏树;柳海芳;蒋伟
【作者单位】辽宁抚挖重工机械股份有限公司
【正文语种】中文
【中图分类】H213.7
【相关文献】
1.伸缩臂履带起重机带载行驶下臂架应力状态分析
2.伸缩臂履带起重机回转时臂架应力状态分析
3.伸缩臂履带起重机直线行驶工况下臂架应力状态分析
4.100t伸缩臂履带式起重机臂架结构设计和优化分析
5.履带伸缩臂起重机有限元模态分析
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车起重机伸缩臂结构有限元分析及优化

汽车起重机伸缩臂结构有限元分析及优化汽车起重机伸缩臂结构有限元分析及优化引言:汽车起重机作为一种重要的工程机械设备,在建筑、物流等行业中起着重要的作用。
而在汽车起重机的设计中,伸缩臂结构是其关键组成部分之一。
伸缩臂结构的合理设计和优化可以提高汽车起重机的工作效率和承载能力,降低其重量和成本。
因此,对汽车起重机伸缩臂结构进行有限元分析与优化具有重要的理论意义和实际应用价值。
1. 伸缩臂结构的设计和工作原理汽车起重机的伸缩臂结构由伸缩臂筒、伸缩臂滑块、伸缩臂大臂、伸缩臂小臂等组成。
其工作原理是通过液压系统控制伸缩臂筒的伸缩,从而实现伸缩臂的变化和起重高度的调节。
伸缩臂结构的设计直接影响汽车起重机的工作性能和稳定性。
2. 有限元分析的原理和方法有限元分析是一种数值分析方法,通过将结构离散化为有限个小元素,利用数学和力学原理对每个小元素进行计算,最后得到整个结构的应力、应变、位移等相关信息。
有限元分析方法可以精确计算伸缩臂结构在不同工况下的受力情况,为优化设计提供基础。
3. 初始结构的有限元分析首先,采用有限元分析方法对汽车起重机初始伸缩臂结构进行分析。
通过初始结构的有限元模型建立和边界条件的设定,计算得到伸缩臂结构在不同工况下的受力情况,包括应力、应变、变形等参数。
利用有限元分析结果,可以评估初始结构的工作性能,并确定需要改进的方向。
4. 结构优化设计与分析基于初始结构的有限元分析结果,可以进行伸缩臂结构的优化设计。
结构优化的目标是提高结构的工作效率和承载能力,降低结构的重量和成本。
通过在有限元模型中进行参数化设计和分析,可以获得不同设计方案下的结构性能指标。
综合考虑结构的强度、刚度、轻量化等因素,选择最优设计方案。
5. 优化设计的验证与验证对优化设计方案进行验证与评估是优化过程的重要环节。
通过将优化设计方案转化为实际工艺制造过程中的参数,并制作样件进行实际测试和评估,可以验证优化设计方案的有效性,并进一步优化设计方案。
起重机伸缩臂有限元参数化分析
3 !载荷计算与模型加载
伸缩臂上作用的载荷有’ 吊重$ 自重$ 风 载 及机构起制动运行的惯性力% 按受力分析可将其
上半月刊" ! " # " $ " %!
! #
截面伸缩臂所受最大应力达到! #其等效应力 ! ) I % 9 分布图如图’所示%
图4 !矩形截面伸缩臂的等效应力云图
图6 !沿路径应力变化
1 !起重机伸缩臂参数化建模
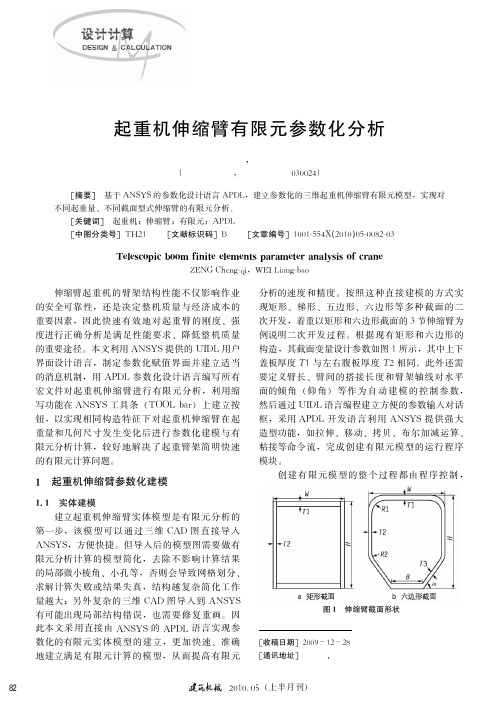
1 2 1 !实体建模 建立起重机伸缩臂实体模型是有限元分析的 第一步# 该 模 型 可 以 通 过 三 维 0 ! & 图直接导入 #方便快捷% 但导入后的模型图需要做有 ! " # $ # 限元分析计算的模型简化# 去除不影响计算结果 的局部微小棱角$小孔等# 否则会导致网格划分$ 求解计算失败或结果失真# 结构越复杂简化工作 量越大&另外复杂的三维 0 ! & 图导入到 ! " # $ # 有可能出现局部结构错误# 也需要修复重画% 因 此本文采用直接由 ! " # $ #的 ! % & ’ 语言实现参 数化的有限元实体模型的建立# 更加快速$ 准确 地建立满足有限元计算的模型# 从而提高有限元
图1 !伸缩臂截面形状
!
! 收稿日期" ! " " ) * # ! * ! ( ! 通讯地址" 曾成奇! 山西省太原市太原科技大学
! "
上半月刊" ! " # " $ " %!
使得原本繁杂的工作变得方便简捷% 六边形截面 伸缩臂整体有限元模型如图!所示#通过改变伸缩 臂仰角的大小和各节臂之间的搭接长度 # 可以完 成不同工况下的有限元分析# 仰角在材料参数输 入界面中输入%
起重机伸缩吊臂局部稳定性的有限元分析

OP+PQPR STURVWXPYPURV
WXRVpqr sqr.URtPRV
Z[\]^_‘a]bcdefg]_\g_h\ij_gk\dldmcdenk]\ho Zuvwkdvx_h^cyhgk]\_‘czd‘{ao
>HA9D?F9
1TXtr|Ut}~U!PtP~"r#U~XtX}|r$P|!rrQ }~%q|~q%XPRU~%q|&|%URX’U}URUt"(X)!"~TX#PRP~X XtXQXR~URUt"}P}U$$%rU|TUR)+,-.-$U|&UVXPR~TP}$U$X%*+rR}P)X%PRV~TX!rrQ |%r}},}X|~PrR U}U’TrtX*U$U%UQX~%P|#PRP~XXtXQXR~Qr)XtUR) U$U%UQX~%P|r$~PQP(U~PrR Qr)Xt#r%tr|Ut }~U!PtP~"|Ut|qtU~PrRr#U!rrQ }~%q|~q%X’X%XX}~U!tP}TX)*1U&PRVU%X|~URVqtU%|%r}},}X|~PrR !rrQ U}URX-UQ$tX*P~}|%P~P|Ut}~%X}}’U}|Ut|qtU~X)*1TX|Ut|qtU~X).UtqX|rPR|P)X}’P~T~TU~ #%rQ ~TXURUt"~P|QX~Tr)*1TXPR|%XU}X).UtqXr#~TX|%P~P|Ut}~%X}}X}#%rQ UTX-UVrRUt|%r}}, }X|~PrR|rQ$U%X)’P~TU%X|~URVqtU%rRX’U}r!~UPRX)*
整体平衡方程为
*80 <81+24 5
*=+
式 *=+中!随 着 <值 增 大 到 一 定 值!亦 即 中 面 力
多功能高空作业平台伸缩臂的有限元分析与优化
() 1 , 5 . 则许用应力 为 : ]331 = 3 . a ' = 3/.= 5 . 5 [ = 5/. 2 53 o ]2 51 167 1 5 MP z 5
式 中:△ } { “ —单元 8 个节点的位移向量 ;Ⅳ] [ —形函数矩阵。
任一点的应变位移的关系为 :6 I { “}e {k= N]△ ‘ "} /
重 物 惯性 阻 转矩 T=  ̄ a 1 3 I :2P  ̄ = 5 N‘ p n
() 1
( 2)
旋转轴的摩擦转矩 T=y+ T= 2 7 I :3 T 2 ̄ 6 . N。 6 n 坡度转矩 T= os a i l3 6 2 I :4P ci s  ̄ = 7 . N。 n n 9 n
21 7
3伸缩臂的有 限元分析
31接触 单元分 析及 其方 程 .
设接触单元的厚度为 e局部坐标系 ( t的原点取在单元 , mn)
f Au 1
2两种工况来研究。 ) 约束第一节立柱的底部各节点在 U 、 、 三 。
个方 向的位移 自由度和 U U 、 R 三个方 向的旋转 自由度 。 R 、R: , U
mut u c i n hg t u e pa f r lf n t ih — i d lt m i o alt o
L i-e gJA GWe,H N i u , A a — a I n fn , N iZ A G L- n G O N n n n Q I j ( c ol f ca ia E g er gJ n s nvr t o in e n eh o g , hni g2 0 , hn ) S ho o h ncl n i ei ,i guU i s y f ce c dT cn l y Z ej n 0 3 C ia Me n n a e i S a o a 1 2
160t履带起重机四轮一带结构设计与有限元分析
Te t x .T x =d m x Bo 3 e t
解 。 由于 实 际 问 题 被 较 简 单 的 问 题 所 代 替 ,故 该
解是 近似 解 而非 准 确 解 。 由于 大 多 数 实 际 问 . i a B s S一 3 1 Vs l ai R 2 2串行 通信控 制 u c [ .北京 :清华大学 出版社 ,2 0 . M] 02 [ ]廖常初 .可编 程控制 器 的编程方 法 与工程 应用 [ . 2 M]
作 者 :陈国凡 址 :安徽省淮南市安徽理工大学机械学院 编 :2 20 30 1
4 结 论
通过 实 验 验 证 和 理 论 分 析 ,该 系 统 简 单 易
地 邮
用 ,成 本 低廉 ,满 足 实 际要 求 ,具 有 一 定 的推 广
价值。
~
收 稿 日期 :2 1 0 1—1 2—1 2
动 整 车前 进 。履 带 板 作 为 整 机 与地 面 直 接 接 触 的 部 件 ,其工 作 环 境 和 使 用 环 境 都 极 其 恶 劣 ,承 受
着挤 压和 弯 曲等 应 力 的作 用 ,是 履 带 起 重 机 上 消
耗量 最多 、备件 最 多的零 件 。
2 有 限元 法
有 限元法 是 用 较 简单 的 问 题 代 替 复 杂 问 题 后 再 求解 ,它 将 求 解 域 看 成 是 由许 多 称 为 有 限元 的 小 的互 连 子 域 组 成 ,对 每 一单 元 假 定 一 个 合 适 的 ( 较简单 的 )近似 解 ,然后 推 导求 解 这个 域 总 的满
1 0t 带 起 重 机 四轮 一带 结构 设 计 与有 限 元 分 析 6 履
张 君 文 豪 冯 亮
160t铁路救援起重机伸缩式吊臂有限元分析及优化

曾宪渊 张仲 鹏 阳 燕 曾宪仕 成都 6 0 3 10 1 西 南交通 大 学机 械 工程 学 院
摘
要 :吊臂 作 为起 ຫໍສະໝຸດ 机 的 起 吊支 撑 重 要 构 件 ,其 设 计 是 否 合 理 ,直 接 影 响起 重 机 的 承 载 能 力 、整 机 稳 定
w een wt h epo nt ee n ot r h ri i teh l ff i lme tsf eANS 0 0, teca eam sa aye n ac ltda d o eb sso h i e wa YS1 . h rn r i n z da d cluae n t ai f l n h
s c n y i a d c c lt n i i f rh ro t z d s h ti c n me tt e r q ie n sfr me h n c rp r e . u h a a ss n a ua i t s u t e p i e o t a t a e h e u r me t c a i a p o e is l l o mi o l t
性和整机 自重 。纵 观国内外 流动式起 重机 吊臂设计 ,大多数采 用 的截面形式 是多边 形截 面。通过对 截面形 式 的
改进 ,采 用 了椭 圆形 截 面 吊臂 设 计 。 通过 有 限 元 软 件 A S S 0 0 N Y 1 . ,对 10 t 路 救 援 起 重 机 吊臂 进 行 分 析 计 算 。 6 铁 并 且 在 此 基 础 上 对 该 伸 缩 式 吊臂 进行 了 优 化 ,使 吊臂 力 学 性 能 满 足 要 求 。
1 铁 路 救 援起 重 机伸 缩 式 吊臂 的 整 体 结 构
起重机吊臂结构有限元模态分析

从 前 N 万阶方振数型据图 可 以 看 出 $第 <%"阶 振 型 其 振 动 形 态 表 现 为 M吊 臂 绕 尾 部 轴 线 的 垂 直 弯 曲 振 型 $这
图 1 油缸铰孔处应力分布 9(:;1 <=%>??@(?=%(AB=(C)D%CB)@=E>
FGH()@>%’D=():ECH>?
试验采用的测试系统结构为
图 8 测点布置位置 9(:;8 IHHCFD=(C)CJ=E>’>D?B%>’>)=KC()=?
通过测量系 统 得 到 的 各 测 点 应 变 量-需 先 转 化 为应力值-然后根 据 第 四 强 度 理 论 得 到 试 验 等 效 应 力 , L8M
Q 模态计算及分析
*+,-,具 有 强 大 的 模 态 分 析 功 能$它 提 供 了 包 括 ,36R7STU子 空 间 法 V%WT:3ST:U缩 减 法 V% 27JRT:U阻尼法V等 D种模态提取方法."0&考虑到吊 臂的模型规模$选用 WT:3ST:法&
根 据 静 态 分 析 结 果$危 险 工 况 发 生 在 吊 臂 水 平 吊重&故选择吊臂水平工况进行模态分析&
则用
W38 9!-j74 "
收稿日期*!""# -- -"
蒋红旗 万徐方州数师范据大学工学院
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
履带伸缩臂起重机有限元模态对比分析
摘要:针对履带式伸缩臂起重机,建立了整机三维模型,提出了模型简化方案。
利用ABAQUS软件对起重机在额定工况下有吊载和无吊载的整机模型进行了模态
分析,得出了10阶共振频率和振型。
对两个模型的模态进行对比分析,得出了
起重机起吊后的模态变化,为避免共振现象的发生提供了理论依据。
关键词:履带式伸缩臂起重机、模态分析、有限元法、整机
0.引言
履带式伸缩臂起重机不仅拥有履带式底盘附着力大、转换方便、带载行走的
特点,还结合了伸缩臂架自由调节长度的优点,在当今施工领域具有广泛的应用
市场。
为提高公司自主研发的ZTCC550履带式伸缩臂起重机的产品质量,提高产
品的安全性能,本文应用ABAQUS软件对起重机进行了计算模态分析,对比了有
吊载和无吊载情况下起重机整机模态,为起重机在极限工况下避免共振提供了帮助。
1. 有限元模型建立和简化
本文的研究对象为为我公司所设计的ZTCC550履带式伸缩臂起重机的整机模型,基本结构如图1所示[1]。
图1 ZTCC550起重机结构简图
起重机的最大额定载荷为55t,整车整备重量为63t;伸缩臂由5节臂组成,
为U型截面,全伸臂长40.3m;采用履带式底盘,履带架可自由展开,搭载自卸
式配重,可360回转。
本文主要分析最大起重量工况下的起重机模态:主臂全缩,吊臂仰角为74°,起吊载重为55吨。
为了得到更加准确的模态分析结果,对模型进行简化是一个重要环节[2]。
本
文针对履带起重机的结构特点对其进行了模型简化:
①钢丝绳和吊钩省略,主臂上不受力的辅助件省略,3、4、5节臂受力等效
作用在各滑轮上;
②两组卷扬卷筒在安装位置(大致的几何中心,可选择卷筒轴线的中点)施
加刚性拉力(适当考虑钢丝绳质量);
③所有原动/驱动部件总成均简化成集中质量,如发动机、油泵等。
④各液压缸简化成一维刚性单元或高刚度单向弹簧单元(据长度、等效截面积、推力确定刚度),两端由铰接或安装位置而定,等效质量在一维单元两端分
布施加;
⑤驾驶室、上下车配重装置简化成集中质量等效作用在铰接点处;
⑥控制系统、液压小元件及管路省略,小型小质量标准件省略;
⑦各焊接部位需要对焊缝进行处理,填平各坡口,保证焊接部位的连续性。
关键部位(主臂、回转台、底座、履带架等)需要增加角焊缝对连接部位进行强化。
本文为了对比在最大起重量工况下有吊载和无吊载的起重机模态,仅在臂架
头加载不同集中质量以示区别:对于无吊载的工况,臂头仅加载吊钩载荷1.1t;
对于有吊载的工况,臂头加载55t。
起重机优化后的整机模型如图2所示。
图2 起重机整机CAE模型
网格划分时,对钢板框架用板壳单元进行网格划分,保留了框架箱体所有的
几何形体特征,其余部位采用三维实体单元进行网格划分。
2. 计算模态分析
将建立好的模型导入ABAQUS软件,起重机主体材料设置为Q345A,密度为7800 kg/m3,弹性模量为2.1×1011Pa,泊松比为0.3。
起重机臂架设置为80号高
强度钢,其密度为7810 kg/m3,弹性模量为2.0×1011Pa,泊松比为0.3[3]。
模态分析中只有零位移约束[4],及只约束履带与地面接触6个方向自由度。
本文计算出了的起重机前20阶模态固有频率及振型,展示了有、无吊载两种工况下的前5阶振型图,并在表1种展示了两种工况的前10阶的固有频率及振
型对比结果。
图2无吊载第1阶振型图3有吊载第1阶振型
图4无吊载第2阶振型图5有吊载第2阶振型
图6无吊载第3阶振型图7有吊载第3阶振型
图8无吊载第4阶振型图9有吊载第4阶振型
图10无吊载第5阶振型图11有吊载第5阶振型
表1 无吊载时起重机前10阶模态
表2 有吊载时起重机前10阶模态
通过对起重机的两种工况模态分析结果可知,在有吊载的情况下,起重机的模态
发生明显变化。
有吊载时前几阶固有频率值明显小于无吊载状态下的固有频率值;对比第一阶模态,主臂振幅无吊载要比有吊载的大;有吊载时伸缩臂几乎在所有
阶次模态下都会出现振动现象;无吊载时,伸缩臂并不参与所有阶次的振动。
起重机实际工作中,发动机的转动、伸缩臂的变幅过程、回转台的互转运动、卷筒的回转都是主要振动源。
通过前文模态对比结果可知,对于低频振动源,起
重机在有吊载的情况下,更容易达到共振频率,产生共振几率更大。
3.结论
1)本文对在额定载荷状态下的ZTCC550履带式伸缩臂起重机进行了三维建模,提出了模型简化方案。
2)对起重机模型在有吊载和无吊载两种状态下进行了模态分析,得出了前
10阶共振频率和振型。
3)对比分析了有吊载和无吊载两种状态的起重机模态,为实际工程中避免共振现象的发生提供了参考依据。
参考文献:
[1]刘洋,杨兵宽,林瀚.履带式伸缩臂起重机整机有限元分析[J].工业(2):
59-60.
[2]张明旭,尹志宏,刘晓东,et al. 结构几何简化对模态结果的影响[J]. 起重
运输机械,2009(3).
[3]范祖尧.现代机械设备设计手册[M].北京:机械工业出版社,1998.
[4]蒋红旗. 起重机吊臂有限元模态分析[J]. 拖拉机与农用运输车(6):35-36.。