西门子TXP系统同步运行机制的研究分析
同步器工作原理
同步器工作原理同步器是一种用于控制多个执行器或机械装置同步运动的装置。
它可以确保多个部件在不同的速度和位置下保持同步,从而实现精确的协调运动。
在现代工业自动化系统中,同步器扮演着至关重要的角色,它们被广泛应用于各种生产线和机械设备中。
同步器的工作原理可以简单概括为,通过传感器获取各个执行器的位置和速度信息,然后通过控制器对执行器进行精确的调节,以确保它们保持同步运动。
具体来说,同步器通常包括以下几个关键组成部分,传感器、控制器、执行器和通信系统。
首先,传感器是同步器的重要组成部分,它们通常安装在各个执行器上,用于实时监测执行器的位置和速度。
传感器可以采用各种不同的技术,如光电传感器、编码器、霍尔传感器等,用于感知执行器的运动状态并将数据传输给控制器。
其次,控制器是同步器的大脑,它接收传感器传来的数据,并根据预先设定的运动规划,对执行器进行精确的控制。
控制器通常采用微处理器或PLC等技术,能够实时处理传感器数据,并输出相应的控制信号,以调节执行器的运动状态。
然后,执行器是同步器的执行部分,它们根据控制器发出的指令,进行相应的运动。
执行器可以是各种不同的机械装置,如电机、气缸、液压缸等,用于实现工件的定位、传送、夹持等功能。
最后,通信系统是同步器的重要支持部分,它用于传输传感器和控制器之间的数据,以及控制器和执行器之间的控制信号。
通信系统通常采用各种工业总线或现场总线协议,如PROFIBUS、CANopen、Modbus等,用于实现各个部件之间的高速、稳定的数据交换。
总的来说,同步器通过传感器实时监测执行器的位置和速度,通过控制器对执行器进行精确的控制,从而实现多个部件的同步运动。
它在现代工业自动化系统中发挥着至关重要的作用,能够提高生产效率、保证产品质量,并且具有广泛的应用前景。
西门子TXP远程控制系统技术改造
对许 多使用 同类 系统 的用户 和开发 者具 有一定 的
借鉴 意义 。
合 了所有 集 中和分散 的控制 , 系统庞 大而 复杂 , 使
用户 对 系统局 部 的开发 , 特别是 增加新 的控 制 , 或 者进 行必 要 的技术改 造感 到十 分的 困难 。 随着 我们对 S m n X i e sT P分 散 控 制 系统 的长 e 期使 用 , 握 了 T P特 性 , 南 京 西 门子 公 司专 掌 X 在 家 的支持 下 , 决 了 T P与 E 2 0 解 X T 0 U主 站 软 件 分 离 、 植 和硬 件 安 装 的各 种 问题 , 经多 次 实验 、 移 并 测 试 、 改 , 20 修 于 06年 2月 2 5日在 华 能 邯峰 发 电 公 司 2号 机 组 上 T P应 用 中成 功 地 实 现 了对 循 X 环水 远程 控制 系统 的改造 和投运 。
( unn af gPw r eea n o , adn0 60 , hn ) H aegH n n o e nr i C . H n a 5 20 C i e G tg a
Ab t a t:Se ns o rls se h sg talte p we lnt sc nr l e n ip re o to tmsp ttg te , sr c ime ’c nt ytm a o l h o rpa ’ e tai d a d ds es d c nr li o z e u o eh r ma ig te s tm uk n o lc td,a d t eeoe df c tfrte u e o d v lp a c n tu ta o a ato . kn yse b l ya d c mp iae h n h rfr iq u o s rt e eo r r o sr c nylc p r fi i l h e e l t I’ rti e s n t a h d io fa tl— n p lt n sain i rp s d.Thsh sb e u c sflyb e o ei e t sf sr ao tte a dt n o ee ma i uai tt sp o e o h h i o o o i a e n s c e su l e n d n n t h
同步电机的工作原理
同步电机的工作原理同步电机是一种常见的电动机类型,其工作原理是通过电磁场的相互作用来产生转矩和运动。
下面将详细介绍同步电机的工作原理。
1. 磁场产生同步电机中有两个主要的磁场:定子磁场和转子磁场。
定子磁场是由三相交流电源提供的,通过定子绕组中的三相电流产生。
转子磁场是由磁极上的直流电流产生的,这些磁极分布在转子上。
2. 磁场相互作用当定子磁场和转子磁场相互作用时,会产生一个旋转磁场。
这个旋转磁场会使得转子开始旋转。
由于定子磁场是通过三相电流产生的,所以旋转磁场的速度与电源频率和极对数有关。
3. 同步运动同步电机的转子会根据旋转磁场的速度进行同步运动。
当转子与旋转磁场同步运动时,称为同步状态。
在同步状态下,转子的速度与旋转磁场的速度相同,这使得同步电机能够保持稳定的运行速度。
4. 转矩产生同步电机的转矩是由磁场相互作用引起的。
当定子和转子磁场之间存在相对运动时,会产生转矩。
这个转矩使得同步电机能够提供机械功率。
5. 控制方法同步电机的转速可以通过控制定子电流的频率和幅值来实现。
通过调节电源的频率和电压,可以改变旋转磁场的速度,从而改变同步电机的转速。
6. 应用领域同步电机由于其稳定的运行速度和高效率的特点,在许多领域得到广泛应用。
例如,同步电机常用于工业领域的压缩机、泵和风机等设备中。
此外,同步电机还被广泛应用于电力系统中的发电机组。
总结:同步电机的工作原理是通过定子磁场和转子磁场的相互作用来产生转矩和运动。
通过控制定子电流的频率和幅值,可以改变同步电机的转速。
同步电机具有稳定的运行速度和高效率的特点,在工业和电力系统等领域得到广泛应用。
同步电机的工作原理
同步电机的工作原理同步电机是一种特殊的交流电机,其工作原理基于电磁感应和磁场的相互作用。
它与普通的异步电机相比,具有更高的效率和更稳定的转速控制性能。
同步电机的工作原理可以简单地描述为:当电流通过电机的定子绕组时,产生的磁场与转子上的永磁体或者电磁铁产生的磁场相互作用,从而产生转矩,使得转子跟随定子的磁场旋转。
具体来说,同步电机的工作原理可以分为以下几个方面:1. 磁场产生:同步电机的定子绕组通过外部电源供电,形成一个旋转磁场。
这个旋转磁场的频率和极数决定了同步电机的转速。
2. 磁场相互作用:同步电机的转子上安装有永磁体或者电磁铁,产生一个固定的磁场。
当定子绕组产生的旋转磁场与转子上的磁场相互作用时,会产生一个力矩,使得转子开始旋转。
3. 同步运行:同步电机的转子会以与定子磁场的旋转速度相同的速度旋转,这就是所谓的同步运行。
当转子的转速与定子磁场的旋转速度保持一致时,同步电机处于最佳工作状态。
4. 转速控制:同步电机的转速可以通过调节供电频率或者改变定子绕组的极数来实现。
通过控制供电频率,可以改变定子磁场的旋转速度,从而改变同步电机的转速。
此外,还可以通过改变定子绕组的极数来调整同步电机的转速。
5. 功率因数控制:同步电机的功率因数可以通过调节定子绕组的电流来控制。
通过控制定子绕组的电流,可以改变电机的功率因数,从而实现对电网的功率因数补偿。
总结起来,同步电机的工作原理是通过定子绕组产生旋转磁场,与转子上的永磁体或者电磁铁产生的磁场相互作用,从而产生转矩,驱动转子旋转。
通过调节供电频率和定子绕组的极数,可以实现对同步电机转速和功率因数的控制。
同步电机具有高效率和稳定的转速控制性能,广泛应用于工业生产和能源领域。
TPS系统和西门子PLC系统之间的通信
A s a tT ipprn oue i i e n t le r et fo m n ao t en P d 7 0 . bt c: h e irdcs r c lad c az o co m u i t n e e S - 0 r s a t pn p a u i p j c ci bw T a s 3 n
2T S和 P C之阔的通 信 P L
西 门子 P C系统和 T S 间的通信 ,要求硬件 、 L P之 软件可靠和稳定 。
21 通 信硬 件 接 ¨ .
双方 距 离较 远 (0m) 80 ,硬 件连 接 是 可行 的 。 2 通 信 协议 . 2
T S系统 和 子 系统 之 间 的连 接采 用 Mo b s P d u 协议 。
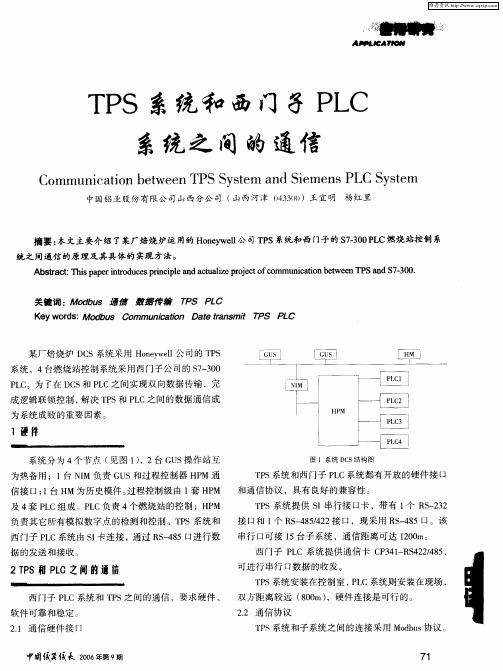
1系 统 D S结 构 图 C
为热备用 ;1 NM负责 G S和过程控制器 H M 通 台 I U P
信接 E ; 台 H 为历 史模 件 。 l1 M 过程 控制 级 由 1 H M 套 P
T S系统 和 西 门子 P C系统都 有 开 放 的硬件 接 口 P L
和通信协议 ,具有 良好 的兼容性 。 维普资讯 . —● 啊 。
口一
伊—
T S 系统 和 西 门 子 P C P L 系统 之 间 的 通 信
C mmu iainb t e P y tm n ime sP C S se o n c t ewe nT SS se a dS e n L y tm o
尔量 ;26个 实数 ;5 2 整 数 ;12 字符 。 5 1个 04个 数组 点 所 映像 子系 统 的数 据可 在操 作 站 GU 上显 S
示 , 可用 于 控 制策 略 中 。 也 这些 数据 可 与 A M或 H M P P
GE新华XDPS控制系统与西门子TXP控制系统通信的建立_叶中华
子站 地址
其中 CM 文件夹包括有系统程序,初始化文件 及用户结构,清单见表 10 。
表 10
CM104. EXE APREDE. EXE ISOPCI. EXE CM. INI H1. DAT
CM. EXE 文件夹中文件清单
功能块执行系统程序 工厂总线通信程序 ISO 通信驱动 系统配置文件 LAN 配置文件 DB / DX 功能块配置数据文件 程序功能块配置文件
Communication Establishment between GE Xinhua XDPS Control System and Siemens TXP Control System
YE Zhonghua ( Guangdong Guohua Yuedean Pow er Generation Co. ,Ltd. ,Taishan,Guangdong 529228 ,China) Abstract: Siemens PSC7 system formerly adopted as digital electric hydraulic control system ( DEH) in steam turbines of units No. 3 in a thermal pow er plan / t is replaced by XDPS400 + system and distributed control system ( DCS ) that adopts TXP control system manufactured by Siemens. To implement integrated monitoring of DCS system and DEH system ,CM 104 at TXP control system side is adopted as virtual communicator and connects to SDPS400 + system via M odbus communication protocol to implement DEH parameter monitoring and operation control at DCS side. Therefore,the paper expounds redundancy configuration connection mode betw een communication hardw are of the tw o systems,principle of M odbus communication protocol,configuration of softw are initialization file of CM104 communicator,w ork principle of CM 104 communicator,configuration of communication modules of DCS and principles of communication implementation betw een the tw o systems. In the end,the paper elaborates on problems and solutions during debugging and initial operation. Key words: M odbus communication protocol; DEH; XDPS ; TXP; CM communicator
核电DCS介绍
DPR
故障诊断系统(DS670)
故障诊断系统(DS670)功能 DS670是TELEPERM XP系统部件进行维修 和故障检测的工具。在控制系统发生故障时,诊 断系统可以向操作员提示故障发生点并提供引起 故障原因等信息,同时可指导仪控工程师快速地 消除故障。诊断系统DS670也与电厂总线(Plant Bus)及终端总线相连, 实现对I&C设备的详细诊 断功能。机组运行时DS670可离线,因此DS670 非冗余配置
SIM
低
14
DPR
AS620自动化系统
FUM模块主要类型:
功能描述 驱动控制模件
功能模件 FUM210ESG FUM210-GB
性能 可以控制和监视8个单机驱动器,5个电机、 电磁阀、开关装置、执行机构,4个伺服驱动 器,3个逆向驱动器。 采集28个二进制信号(28个单接点或14个换 向接点) 采集和处理16个转换器输入信号,0~20mA 或4~20mA,2或4线制 可连接14个热电阻或28个热电偶信号
28
DPR
故障诊断系统(DS670)
特点: 1,详尽的诊断和分析。 2,操纵员基于窗口的指导找到故障源。 3,信息以文本和图形的 格式给出。 4,关于维护的统计,计算和详尽的信息。 5,快速和可靠的系统分析和状态估计。 6,监视和诊断的信息从ES680的配置数据中获 得,无需额外的工作。
29
DPR
21
DPR
SIMATIC NET 总线通讯系统
网络拓扑图
22
DPR
SIMATIC NET 总线通讯系统
虚拟环网技术(1):单容错能力
23
DPR
SIMATIC NET 总线通讯系统
虚拟环网技术(2)
同步电动机运行分析
同步电动机的异步启动过程
• 二、全压起动状态 星点柜合闸后,电动机进入异步全压起 动状态,转速迅速上升,当达到亚同步速 (即94%—97%同步速)时,励磁柜向电 机投励,即励磁柜向电机的励磁绕组输出 直流电压,将电动机励磁绕组重灭磁电阻 换接到励磁电源上。
同步电动机的异步启动过程
• 三、整同步状态 • 电动机转子上的励磁绕组接到励磁柜的直流电源后,在转 子上产生“+ ,-”两个均匀的磁场,与电动机定子接入三 相交流电所产生的旋转磁场相互吸引,在吸引力的作用下, 电动机的转子按照定子旋转磁场的方向和速度,转动起来。 • 注:同步电动机牵入同步运行的过程是个非常复杂的状态, 在牵入同步时,电机的定子电流大幅度波动从0到额定值; 功率因数也大幅度波动从欠励到过励。这些变化,足以证 明电机在整同步的过程中,内部电量、磁量之间的关系复 杂多变。一般来说在牵入同步前转差率越小,电动机的转 动惯量越小,负载越轻(一般都是空载启动),牵入同步 就越容易实现。
同步电动机的定义
• 同步电动机与异步电动机的比较 同步电动机 异步电动机 转速 不随负载的 随负载的 大小而改变 大小而改变 效率 高 低 功率因数 可调,可工作在 不可调,滞后 超前、平激、滞后 稳 定 性 稳定性高,转矩 稳定性差,转矩与 与端电压成正比 端电压平方成正比
同步电动机的结构
• 同步电动机的定子和异步电动机的定子相 同,转子不相同。 • 一般来说,同步发电机的转子做成隐极式 转子;同步电动机的转子做成凸极式转子。 • 转子上有励磁绕组和启动绕组(笼型绕组)
同步电动机在结构上就采取了一些措施, 把异步电动机那样的鼠笼绕组,装到了自 己的转子上。鼠笼绕组的导条用电阻率很 高的黄铜或铝青铜。在导条的两端用端环 联成一体,有了笼形绕组后,当定子绕组 接上电源,便能产生异步转矩,使同步电 动机转起来。起动结束达到同步转速后, 转子导体与旋转磁场没有相对速度,笼形 绕组中没有电流,也就失去作用了。
TXP-PCS7比较
可实现的控制规模可达30000点
OS操作站
系统平台 网络接口 接口电缆 计算机 ES软件
ES工程师站
系统平台 网络接口 接口电缆 计算机
处理单元 服务器单元
网络协议
PCS7 OS软件(WINCC服务器/工作站软 OM650 操作终端OT软件 件) WINDOWS NT4.0 SCO UNIX CP1613 10/100M工业以太网 CP1613 10/100M工业以太网 工业以太网ITP/TP电缆 工业以太网ITP电缆 西门子工控机/服务器(配置可选) 西门子服务器(配置可选) PCS7 ES软件(STEP7,CFC,SFC, ES680 图形化组态软件(面向电厂对象) WINCC CS软件) WINDOWS NT4.0 SCO UNIX CP1613 10/100M工业以太网 CP1613 10/100M工业以太网,CP1413 工业以太网ITP/TP电缆 工业以太网ITP电缆 西门子工控机/服务器(配置可选) 西门子服务器(配置可选) OM650 处理单元PU(西门子服务器,配置 通用IPC/硬件 可选) OM650 服务器单元SU(西门子服务器,配 通用IPC/硬件 置可选) 工业以太网,终端总线:TCP/IP,电 工业以太网,终端总线:TCP/IP,电厂总 厂总线:TCP/IP,PROFIBUS FMS, 线:SFT S7通讯 OSM/ESM(switch 100M/bit), ASGE星型偶合器 光缆,同轴电缆,工业以太网电缆 光缆 23Km,同轴电缆 500m,以太网 电缆 100m,环型冗余 冗余CPU414H/CPU417H,冗余电源, 网络接口模件和背板总线 总数字量1300通道,总模拟量330通 道 ET200M I/O单元,PROFIBUS DP总线 FM350 记数 OSM/ESM(switch 100M/bit),ASGE星型 偶合器 光缆 光缆 23Km,虚拟环4.3Km,环型冗余 AS620B: 冗余CPU948R,冗余电源,网络 接口模件和扩展模件(随标准机柜 IP20/IP54) 总模拟量900通道,总数字量15000通道 FUM子机架(14个FUM模件,随标准机柜) MAX:扩展6个 DI: FUM210(28DI,1ms) FUM511(16DI,16DO)
「分析」两种同步电机之间的区别,同步电动机的运行原理以及差异
「分析」两种同步电机之间的区别,同步电动机的运行原理以
及差异
来源:网络
无刷直流电动机(简称BDCM)
其出发点是用装有唯玛特永磁体的转子取代有刷直流电动机的定子磁极,将原直流电动机的转子电枢变为定子。
有刷直流电动机是依靠机械换向器将直流电流转换为近似梯形波的交流,而BDCM是将方波电流(实际上也是梯形波)直接输入定子,其好处就是省去了机械换向器和电刷,也称为电子换向。
为产生恒定电磁转矩,要求系统向BDCM输入三相对称方波电流,同时要求BDCM的每相感应电动势为梯形波,因此也称BDCM为方波电动机;
永磁同步电动机(简称PMSM)
其出发点是用永磁体取代电励磁式同步电动机转子上的励磁绕组,以省去励磁线圈、滑环和电刷。
PMSM的定子与电励磁式同步电动机基本相同,要求输入定子的电流仍然是三相正弦的。
为产生恒定电磁转矩,要求系统向PMSM输入三相对称正弦电流,同时要求PMSM 的每相感应电动势为正弦波,因此也称PMSM为正弦波电动机。
VEMT减速机小结同步电动机的最大优点是调节励磁电流可以改
变功率因数。
在一定有功功率下,改变可得到同步电动机的U形曲线。
过励时从电网吸收超前无功功率,欠励时从电网吸收滞后无功功率。
当改变同步电动机的励磁电流时,能够改变同步电动机的功率因数,这点是三相异步电动机所不具备的。
当改变励磁电流时,同步电动机功率因数变化的规律可以分为三种情况,即正常励磁状态、欠励状态和过励状态。
同步电动机拖动负载运行时,一般要过励,至少运行在正常励磁状态,不要让它运行在欠励状态。
来源:网络。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 TXP 系 统 拓 扑 结 构
2 1 结 构 介 绍 .
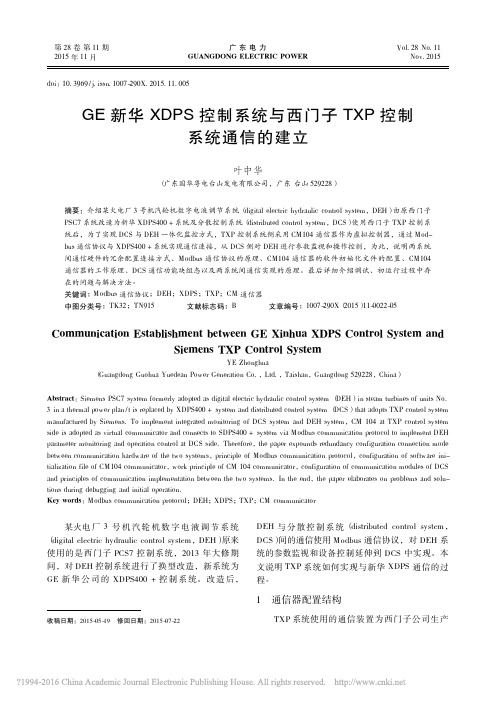
T XP 系统 具 体 配 置 见 图 1 ,由 星 型耦 合 器 1和 星 型 耦 合 器 2分 别 构 成 了 Temia— u 终 端 总 r n lB s(
线 , 以下 简 称 TB) 和 P a tB s( ln — u 电厂 总线 ,以下 简称 P B)两 种 总 线 框 架 ,P 单 元 因为 既 要 获 得数 U 据 进 行 运算 处 理 , 又要 将 数 据 送 至 人 机 接 口 ,所 以 它 分 别 通 过 C 4 3卡 和 TP- C 卡 与 P 和 TB P1 1 - P B 连 接 。E 单 元 和 P 的 连 接 方 式 一 样 ,也 分 别 与 S U
董 晓 伟
( 西 电力科 学研 究院 ,山 西 太 原 山 00 0 ) 3 0 1
摘 要 : 单 介 绍 了西 门子 TXP 系统 的 数 据 传 输 机 制 , 析 了 系统 的拓 扑 结 构 ,详 细 介 绍 了 时钟 系 简 剖
统 ,并 从 软 件 角 度 分 析 了 系 统 的 基 础 结 构 , 而 阐 明 了 理 解 系 统 的 同 步 运 行 机 制 是 理 解 Tx 分 散 从 p
阳 城 国 际 发 电 有 限 公 司 采 用 的 TX 系 统 分 为 P
TXP 系 统 对 需 要 记 录 的 事 件 都 贴 上 时 间 标 签 进 行 传 输 ,这 有 助 于查 阅事 件 发 生 的顺 序 ,整 定 控 制 参 数 ,分 析 事 故 原 因 。很 明 显 时 间标 签 增 加 了系 统 的 通 讯 量 ,这 就 要 求 优 化 系 统 时 有 选 择地 设 置 。
c 总 线 上 数 据 传 输 的 负 荷 率 最 好 勿 超 过 ) 4 ,否 则 会 出 现 麻 烦 ,这 就 要 求 对 传 输 的数 据 进 0 行优化 。
1 TXP 系 统 的 数 据 采 集 和 传 输
采 集 过 程 。现 场 数 据 如 温 度 、压 力 、 流 量 等 模 拟 变 量 和 马 达 开 关 等 开 关 变 量 ,进 入 采集 模 件 进 行 滤 波 、迟 延 、限 幅 等 预 处 理 ,这 里 要 注 意 采 样 时 间 、
控 制 系统 的 关 键 。
关 键 词 : 同 步 运 行 机 制 ; 数 据 传 输 ; 拓 扑 结 构 ; 时 钟 ; 基 础 结 构 中 图分 类 号 : TK3 2 文 献 标 识 码 : B 文 章 编 号 : 6 10 2 ( 0 1 0 — 0 9 0 1 7 — 3 0 2 0 ) 50 0 — 3
分析。
数 据 传 输 。TXP 系 统 有 2条 冗 余 的 总 线 T r e—
mia— u n lB s和 P a tB s 采 集 回来 的数 据 , 过 AS ln — u 。 经 单 元 进 行 控 制 运 算 后 ,一 方 面 进 行 控 制 操 作 ,另一 方 面 将 数据 通 过 P a tB s和 网桥 传 输 给 P ln — u U, U, S E S等 单 元 ,以进 行 性 能 计 算 、数 据 存 档 等 操 作 。过 程 数 据 通 过 Temia— u r n lB s和 网桥 进 入 oT 单 元 , 运
死 区 、 回滞 区 、变 化 率 等 参 数 的设 置 ,因 为 它 们 直
接 影 响 到 系统 的通 讯 负 荷 。应 注 意 两 个 概 念 :① 事 件 的 概 念 ,TXP 系 统 认 为 事 件 有 两 个 含 义 , 一 是 其 指 开 关 量 的变 化 ,其 二 是 指 模 拟 量 的变 化 ,当模 拟
维普资讯
第 5期 ( 第 1 7期 ) 总 0
20 0 2年 1 0月
山 西 电 力
SH A N X I ELEC TR I C P0 W E R
NO.5 ( r. Se 17) 0ct 200 . 2
西 门 子 TXP 系 统 同 步 运 行 机 制 的 研 究 分 析
自动 系统 AS 2 、操 作 监 控 系 统 M 6 0 60 5 、工 程 师 站
E 6 0三 大 方 面 。 它 由 P ( 作 监 控 单 元 ) U S8 T 操 、S
( 据服务单元 ) U ( 据处理 单元 ) 数 、P 数 、AS ( 自动 单元) 、ES ( 2 师 单 元 )等部 分 组 成 。其 中 AS 负 3程 责 数 据 采 集 、开 闭 环 控 制 , U 负 责 数 据 的通 讯 、运 P 算 处 理 和 短 期 存 储 ,S 负 责 数 据 的 长 期 存 储 及 报 U 表 打印等功能 , OT 是 人 机 接 口 , 责 过 程 监 视 和 操 负 作 , ES是 工 程 师 站 ,所 有 组 态都 在 这 里 进 行 ,它 同 时 可 以监 控 系统 的 通 讯 状 况 和 其 他 各 单 元 的运 行 情 况 ,处 理 系统 的 各 类 故 障 。 如 何 使 各 个 单 元 能 够 有 机协调地 运行 , T 是 XP 系统 完 整 运 行 的 关 键 , 清 弄 TX 系统 的 同步 运 行 机 制 ,有 助 于 加 深 系 统 认 识 , P 分 析 故 障 原 因 ,提 高 系 统 的 维 护 水 平 ,本 文 总 结 了 作 者 在 实 际 工 作 中 的 一 些 经 验 以及 与 西 门 子 专 家 的 共 同 探 讨 心 得 ,对 TXP 系 统 的 同步 运 行 机 制 进 行
行 人员在此 监视 各设 备运行 状况 并进行 适 当操作 。
这里要 注意几点 :
a )总 线 、 网 桥 、P ,S 等 都 是 冗 余 的 ; u U
b )Te mia— u r n l s上 的 数据 遵 循 TC /P协 议 , B PI
P a tB s 上 的 数 据 遵 循 AP D 协 议 ; ln — u RE