一种多发射DSP的数据相关控制
基于DSP+FPGA的实时信号采集系统设计与实现

基于DSP+FPGA的实时信号采集系统设计与实现周新淳【摘要】为了提高对实时信号采集的准确性和无偏性,提出一种基于DSP+FPGA 的实时信号采集系统设计方案.系统采用4个换能器基阵并联组成信号采集阵列单元,对采集的原始信号通过模拟信号预处理机进行放大滤波处理,采用TMS32010DSP芯片作为信号处理器核心芯片实现实时信号采集和处理,包括信号频谱分析和目标信息模拟,由DSP控制D/A转换器进行数/模转换,通过FPGA实现数据存储,在PC机上实时显示采样数据和DSP处理结果;通过仿真实验进行性能测试,结果表明,该信号采集系统能有效实现实时信号采集和处理,抗干扰能力较强.%In order to improve the accuracy and bias of real-time signal acquisition,a real-time signal acquisition system based on DSP +-FPGA is proposed.The system adopts 4 transducer array to build parallel array signal acquisition unit,the original signal acquisition amplification filtering through analog signal pretreatment,using TMS32010DSP chip as the core of signal processor chip to realize real-time signal acquisition andprocessing,including the signal spectrum analysis and target information simulation,controlled by DSP D/A converter DAC,through the realization of FPGA data storage,real-time display on the PC and DSP sampling data processing results.The performance of the system is tested by simulation.The results show that the signal acquisition system can effectively realize the real-time signal acquisition and processing,the anti-interference ability is strong.【期刊名称】《计算机测量与控制》【年(卷),期】2017(025)008【总页数】4页(P210-213)【关键词】DSP;FPGA;信号采集;系统设计【作者】周新淳【作者单位】宝鸡文理学院物理与光电技术学院,陕西宝鸡721016【正文语种】中文【中图分类】TN911实时信号采集是实现信号处理和数据分析的第一步,通过对信号发生源的实时信号采集,在军事和民用方面都具有广泛的用途。
基于多DSP网络和软件无线电的扩频通信研究
第 2 期
吴 雪 冰 等 : 于 多 D P网络 和 软 件 无 线 电 的扩 频 通 信 研 究 基 S
7 3
状 态切 换 , 带 数字 部分 的一 些逻 辑 时钟 生成 、 基 处理 以及 和外 部 接 口, 送 端 数 据处 理 , 收下 变频 等 任 务. 发 接 多 DS P网络 主要 完成 扩频 、 扩 、 解 卷积 编码 、 译码 、 织 、 交 织 、 帧 ( 交 解 成 或子 帧 ) 拆 帧等 大量 数 据 的运 算处 理 、
具 有较 强 的生 存能 力. 序列 理论 较为 成 熟 , 用 多 D P网络 使 序列 码 的 产生 软 件 化 , m 利 S 充分 显 示 出对 D P S
的灵活 运用和 新颖 的设 计思想 . ]
1 设计 思 想
基 于软件 无线 电 的扩频发 射机 的主要 功能是 完成 模拟 信 号 的采样 数 字化 、 带信 号 的卷 积 编码 、 频 、 基 扩
交 织 、 帧 、 冲成形 及 调制功 能 , 成 脉 同时易 于扩展 以便完 成 以后 所 附加 的其 他功 能. 对硬 件 平 台 的设计 , 保 要 证 在 以后新功 能 的实现 中几乎 不改变 硬件 , 只需 要添 加 或者 对软 件进 行修 改 就可 以达 到其 功能 升 级 的 目 而 的 , 以应 尽量 减少 专用芯 片的使 用 而采用具 有扩 展性 的通 用 芯片 . 文主要 是 对 发射 机进 行 设 计 , 个 系 所 本 整
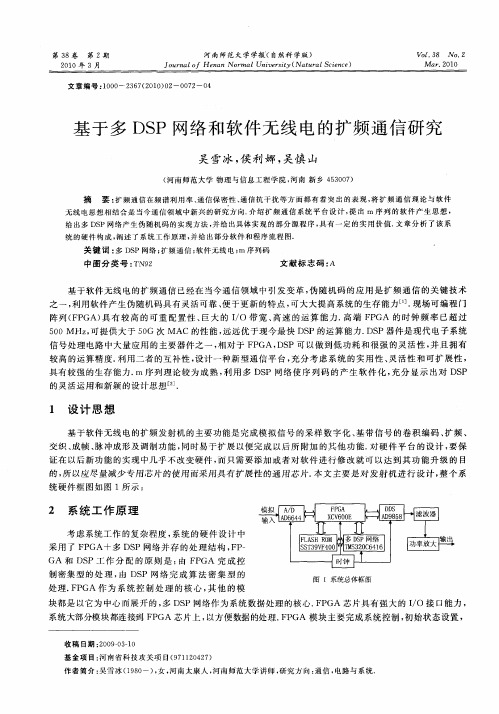
给 出 多 D P 网络 产 生 伪 随 机 码 的 实 现 方 法 , 给 出具 体 实 现 的 部 分 源 程 序 , 有 一 定 的 实 用 价 值 . 章 分 析 了该 系 S 并 具 文 统 的 硬 件构 成 , 述 了 系 统 工作 原理 , 给 出 部分 软件 和程 序 流 程 图. 阐 并
基于DSP的机载远程投放控制终端设计
基于DSP的机载远程投放控制终端设计作者:王海锋梁晶晶田苗来源:《现代电子技术》2013年第06期摘要:针对导弹研制靶场试验的需求,设计了一种基于DSP的机载远程投放控制终端,用于红外干扰源的投放控制。
给出了控制终端的组成结构,重点介绍硬件设计及软件设计,通过在线编程技术方便投放模式的远程加载,使用特定的数据帧编码原则提高了无线数据传输的可靠性。
多次的外场靶试试验验证了系统设计的通用性和工程实用性。
关键词:远程投放;控制终端; DSP;在线编程;数据帧编码原则中图分类号: TN911⁃34; TP23 文献标识码: A 文章编号: 1004⁃373X(2013)06⁃0029⁃030 引言导弹研制过程中为考核其抗干扰性指标,需要在靶机上加装红外干扰源的投放装置,在靶机起飞后的特定时间段内,按一定的投放序列完成红外干扰弹的投放,在靶机周围形成与靶机红外辐射特征相似的红外辐射源,对导弹进行干扰[1]。
以往使用的投放装置,其投放模式基本都是比较固定的:一次性全部投放或以固定时间间隔进行投放,并且投放模式的设置都是在靶机起飞前固化在装置内,无法进行再次修改。
这种比较固定的投放模式不能充分验证导弹的抗干扰性能指标,同时当靶机上天后发现投放模式设置有误或临时需更改投放模式时,无法进行再次重新加载,浪费试验机会,这些因素严重制约了导弹靶场试验的有效开展。
以DSP为控制核心的机载远程投放控制终端,利用无线数传电台接收来自地面站的控制指令,对接收到的无线通信数据进行解调、接收和存储,完成投放模式的设置及点火指令的响应,利用处理器的数字I/O信号完成红外干扰源的点火控制,实现靶机的投放任务。
1 硬件电路设计1.1 系统组成结构机载远程投放控制终端采用模块化设计,主要由通信单元、电源单元、控制单元及执行单元4个部分组成。
通信单元利用无线数传电台负责与地面站的远程通信;电源单元对靶机上的直流供电进行隔离与转换,实现投放控制终端用电的匹配;控制单元一方面接受来自地面站的指令,完成投放模式的配置,并根据指令完成对执行单元的控制,同时将终端的状态通过通信单元反馈到地面站;执行单元接收控制单元的指令,对靶机上的每一个红外干扰弹单独进行投放控制。
汽车传感技术实验报告(3篇)
第1篇一、实验目的本次实验旨在通过实际操作,了解和掌握汽车传感技术的基本原理、工作方式以及在实际应用中的重要作用。
通过实验,我们能够深入理解超声波传感器、3D视觉感知技术以及DSP在汽车传感器实验台中的应用,并分析其优缺点及在实际驾驶中的具体作用。
二、实验内容1. 超声波传感器实验- 实验原理:利用超声波传感器发射超声波,测量声波在空气中传播的速度和遇到障碍物反射回来的时间,从而计算出发射点到障碍物的实际距离。
- 实验步骤:1. 连接超声波传感器与实验台。
2. 通过上位机设定发射频率和接收灵敏度。
3. 将实验台放置于不同距离的障碍物前,记录超声波传感器测得的距离数据。
4. 分析数据,评估超声波传感器的准确性和稳定性。
2. 3D视觉感知技术实验- 实验原理:利用3D视觉感知技术生成车辆周围的三维点云图,捕捉道路、建筑物、障碍物等目标的形状和位置信息,帮助车辆进行精确定位、路径规划、障碍物避让等关键任务。
- 实验步骤:1. 连接3D视觉感知设备与实验台。
2. 设置实验场景,包括道路、建筑物、障碍物等。
3. 运行3D视觉感知软件,生成三维点云图。
4. 分析点云图,评估3D视觉感知技术的准确性和实用性。
3. DSP在汽车传感器实验台中的应用- 实验原理:利用DSP控制器,实现对汽车传感器的精确控制和数据处理。
- 实验步骤:1. 连接DSP控制器与实验台。
2. 编写控制程序,实现对传感器的控制。
3. 运行程序,观察实验台的工作状态。
4. 分析实验结果,评估DSP在汽车传感器实验台中的应用效果。
三、实验结果与分析1. 超声波传感器实验- 实验结果显示,超声波传感器在不同距离的障碍物前能够准确测量距离,但在强光、雨雾等恶劣环境下,测量精度有所下降。
- 分析:超声波传感器具有成本低、体积小、重量轻等优点,但在恶劣环境下性能有所下降。
2. 3D视觉感知技术实验- 实验结果显示,3D视觉感知技术能够生成精确的三维点云图,捕捉到周围环境中的各种目标。
高速多通道数据采集传输系统的设计
高速多通道数据采集传输系统的设计*赵忠凯,尹达,刘海朝【摘要】摘要:设计了一种基于FPGA与DSP的高速多通道实时数据采集传输系统。
该系统通过FPGA实现对时钟、ADC、DSP等芯片的功能配置,采集数据由FPGA预处理后通过EMIF接口传送至DSP,并完成后续的复杂信号处理。
该系统最高数据采集速率可达500 MSPS,FPGA与DSP之间可实现高速率的数据传输。
实际测试结果表明,该系统实现了多通道数据的实时同步采集、传输与处理,数据采集达到较高性能,能够满足当前复杂电磁环境下精确制导雷达数据处理分析的需求。
【期刊名称】火力与指挥控制【年(卷),期】2015(000)012【总页数】5【关键词】多通道,高速数据采集,EMIF,FPGA&DSP0 引言当前电磁信号环境越来越复杂,电磁信号密度已达到百万量级[1],这就要求雷达信号识别处理系统必须具备快速、准确识别威胁的能力,能够为之后作战提供及时可靠的信息。
随着一些新算法的出现,信号处理复杂度越来越高,动态范围也要求越来越大,信号的通道数也越来越多,因此,多通道信号的采集处理已成为当前雷达数字接收机的发展趋势。
传统的信号采集和传输方法已不能完全满足当前复杂电磁威胁环境下信号处理机对处理数据的要求[2],必须应用更精确更高速的采集系统,保证电子战环境中的主动权,所以对雷达信号高速多通道采集传输系统的研究具有重大且深远的意义。
FPGA具有强大的数据并行处理能力,能够满足高速ADC的数据处理要求,非常适合作为本系统的逻辑控制核心。
高性能多核DSP的高速运算能力使其适合选作复杂算法的主处理芯片[3]。
1 系统总体方案雷达信号高速多通道数据采集传输系统总体框图如图1所示。
设计中所选用的ADC芯片数据转换速率最高可达500 MSPS。
FPGA芯片选择Altera公司Stratix III系列的EP3SL200F1152C2,DSP芯片选择TI公司的TMS320C6678。
DSP的软件系统下的无线电雷达应用技术研究
DSP的软件系统下的无线电雷达应用技术研究摘要:随着全球信息化与数字化的发展,基于dsp的软件无线电技术作为一种高端、灵活的通信系统结构,给用户带来了便捷和优质性能。
该文主要通过研究dsp原理及软件无线电技术及两者的巧妙组合优势,进而研究无线电雷达应用技术,最后还阐述了其应用前景和研究意义。
关键词:dsp;软件系统;无线电;雷达;应用技术中图分类号:tp311 文献标识码:a 文章编号:1009-3044(2013)13-3194-031 基于dsp的软件无线电系统概述1.1 dsp原理与特征分析dsp,俗称数字信号处理器,是利用计算机软硬件设备和信号处理设备,通过对信号的数字化采集、变换、滤波、估值与识别等算法研究,再结合微处理器与软硬件设备,来实现各种算法[1]。
dsp 系统主要由以下四部分组成:抗混叠滤波器用于滤掉输入信号中高于折叠频率的分量,数据采集a/d转dsp系统的处理器用于将输入信号转换为数字信号,d/a转换器可将数字信号转换成模拟信号,低通滤波器可滤除高频分量,得到平滑模拟信号。
与传统的asp相比,dsp具有高精度,高可靠性,高性能,灵活性大,成本低,,扩展性好,易于大规模生产应用;dsp芯片则具有接口便捷,多功能,体积小,功耗低等特点。
现阶段我国关于dsp 系统研究正处于逐步完善阶段,尤其是对信号处理的能力,以及硬件与软件方面取得了跨越性的发展。
1.2 软件无线电软件无线电是一种基于现代通信理论,采用数字信号处理与微电子技术将标准化、模块化的硬件单元以总线方式连接构成通用的硬件平台,再加载各种软件以实现无线电通信功能的一种开放式无线电通信体系结构。
软件无线电因其系统结构的一致性与通用性,并可采用不同软件实现各项功能的特点,使得功能的完善与升级更加便捷,且系统各模块可复用,极大地降低了更换成本;同时在相对一致的硬件平台加载各种软件所对应射频可使系统的相互操作性成为可能。
另外,软件开发周期较硬件短,成本较低,易于更新,使通信系统的生存期更长了一些;若采用新数字信号处理手段,不仅可以提高抗干扰性能,还可实现其他超越性系统功能,如在线改变信号调制模式。
现代数字信号处理
现代数字信号处理现代数字信号处理(DSP)是一种利用数字信号处理器和软件来对连续时间信号进行数字化以及进行数字信号处理算法的技术。
数字信号处理在数字音频、无线通信、医学图像、声音处理、雷达和测量学等众多领域中都得到了广泛应用。
数字信号处理的原理是将连续时间信号进行采样、量化、编码为数字信号,再进行数字滤波、频谱分析及数字信号处理等数学运算,最后再通过数模转换器转化成为模拟信号。
数字信号处理是在数字信号处理器(DSP)中执行的,DSP是一种基于专用硬件和软件开发的微处理器,用于高速处理数字信号。
在数字信号处理中,最主要的数学工具是傅里叶变换。
傅里叶变换将一段时间信号分解为一系列正弦波,并将振幅及相位信息变成复数形式。
傅里叶变换的反变换可以将信号从频率域重建回原始时间域。
傅里叶变换在频域分析和滤波处理中扮演了非常重要的角色。
数字滤波也是数字信号处理中的重要部分。
数字滤波可以根据滤波器的类型来去除信号中的高频或低频噪声,以及增加信号的某些频率成分,从而改善信号质量。
数字滤波器的种类多种多样,包括低通、高通、带通和带阻滤波器。
在数字滤波中,数字滤波器的设计与实现是非常重要的。
另外,数字信号处理还具有许多优点。
首先,数字信号处理器可以通过软件和固件升级来不断增强处理效率和功能。
其次,数字信号处理可以利用数字信号的精确度和可编程性,具有很高的信号处理精度和灵活性。
最后,由于数字信号处理器可以对多路信号同时进行处理,因此具有很好的处理多通道信号的能力。
数字信号处理在许多领域都得到了广泛应用。
例如,在音频处理方面,数字信号处理可以对声音进行降噪、滤波、均衡和压缩等处理,从而实现更好的听感效果。
在移动通信方面,数字信号处理可以对调制解调、编码译码等信号处理技术进行优化,提高通信效率和通信质量。
在医学图像处理方面,数字信号处理可以对生物信号进行分析和诊断,其中包括心电图、脑电图和心率变异性等医学信号。
总之,数字信号处理在现代通信和信息技术中扮演着非常重要的角色。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Microcomputer Applications Vol. 27, No.11, 2011 技术交流 微型电脑应用 2011年第27卷第11期 ·56·文章编号:1007-757X(2011)11-0056-03 一种多发射DSP的数据相关控制
王晓勇,张盛兵,黄嵩人 摘 要:超标量技术的应用,使DSP设计中的数据相关控制变得尤为重要。介绍并实现了一种多发射DSP的数据相关控制机制。在指令的译码和执行周期进行寄存器地址指针比较,根据比较器的结果及指针有效信号检测指令间的数据相关,再通过结果前推与寄存器冒险控制相结合的方式来消除数据依赖,减少流水线的停顿,提高处理器的性能。 关键词:数据相关;寄存器冒险;前推控制 中国分类号:TH332 文献标志码:A
0 引言 超标量技术通过多条指令并行执行的方式,以提高处理器性能,但也导致了不同流水之间指令的相关性问题。流水线的深度和并行度的提高以及功能单元数量的增加使得数据相关性对性能的影响也更加严重。 先前对数据相关性问题的研究包括:采用寄存器重命名技术来克服寄存器相关,可以通过软件静态实现也可以通过硬件动态实现;采用指令缓冲区是流水线具有一定的乱序执行能力,减少数据相关引起的停顿[1][3]。这些方法主要通过
调整存在相关的指令以提高指令执行效率,并未对数据相关做详细研究。 本文所讲的相关控制机制是基于已设计完成的某型号DSP,此机制是基于大量寄存器指针比较器的结果,在严密的数据相关检测条件下,首先采用前推控制对执行结果进行定向传送,当前推无法解决时,再生成寄存器冒险信号并将其发送到流水线控制模块,由流水线控制模块对各流水线的状态进行控制,从而实现流水线深度与并行度双方面的数据相关控制。
1 多发射DSP流水线 在采用超标量技术该DSP中包含两条主要流水线和一条从流水线。两条主要流水为4级深度,共享一个取值阶段,随后分别在其流水线内部进行译码、执行、和写回。一条流水线叫做整数流水线,主要处理数据运算的指令,包括MAC、ALU、BMU运算单元;另一条流水线叫做取存流水线,主要实现地址运算、访存、跳转、调用和上下文交换的操作。从流水线是循环流水线,专门用于循环指令,它的目的是零开销的循环指令,即循环流水线中的循环指令有效时,通过相应的数据通路,循环指令直接从译码阶段到写回阶段,可实现零开销循环。 根据其发射机制该DSP可以在每个时钟周期往每个主要流水发射一条指令:其中相邻的两条数据运算指令只能被发射在独立的周期内;取存指令被发射时可以被.单独发射
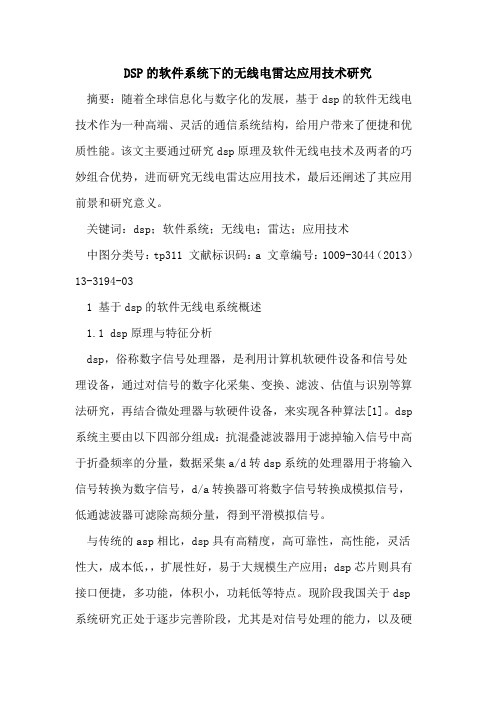
或与一条数据运算指令配对发射;而MAC指令执行需要两个周期执行一阶段实现乘操作,执行二阶段实现累加操作;需要注意的是当主要流水线中的任意一条悬停时,另一条也同时自动悬停。该DSP的基本结构如图1所示:
内核
数据存储器单元(可配置)
指令存储器单元(可配置)
数据 CACHE数据 SPRAM指令 CACHE指令 SPRAM
整数流水线指令取存流水线指令MACALUBMU地址生成单元地址ALU数据寄存器堆地址寄存器堆循环缓存
取指单元取指级
译码级执行级写回级
64
128 图1流水线结构图 多条流水的流水线技术在提高指令执行速度的同时也使得流水线各段及其流水线之间的相互依赖更加复杂[2]。如果处理不当,指令的运行达不到预期的结果,因此设计基于流水线的多发射DSP,必须注意流水线的数据相关问题。
2 数据相关控制 在该DSP中主要通过前推控制和寄存器冒险相结合的机制来控制数据相关,以解决数据冲突,提高处理器性能。这种机制的基础是在硬件设计中加入比较器,通过比较器对
—————————————— 基金项目:“核高基”重大专项基金资助项目 (2009ZX01034-001-002-003);
作者简介:王晓勇(1986-),男,陕西宝鸡人,西北工业大学计算机学院,硕士研究生,研究方向:微处理器设计,西安,710072
张盛兵(1968-),男,西北工业大学计算机学院,教授,博士生导师,研究方向:VLSI设计、计算机体系结构,西安,710072
黄嵩人(1972-),男,中国电子科技集团公司第五十八研究所,教授级高级工程师,研究方向:数字集成电路设计,无锡,214035 Microcomputer Applications Vol. 27, No.11, 2011 技术交流 微型电脑应用 2011年第27卷第11期 ·57·读写寄存器指针进行比较,由比较结果及相应的指针有效信号判断所读写的寄存器数据是否存在相关[4],假如相关,先考虑采用前推机制来解决,即将执行级或写回级的数据前推,如果所需的数据无法前推,则生成相应的寄存器冒险信号,将冒险信号传送给流水线控制模块由其对各流水线进行实时控制。 2.1通过前推解决数据相关 在该DSP中,非访存指令在译码阶段从寄存器读取源操作数,存储指令在执行阶段由逻辑运算单元计算出访存地址后从寄存器读取源数据。根据前推的作用周期,将其分为W-D、W-E、E-D三种,对各种前推进行详细定义,在产生数据相关时,根据判断条件确定相应的前推控制信号,由其决定执行结果是否要通过定向的数据通路传送[5]。 分别在指令的译码和执行阶段对指令的源寄存器和目标寄存器号进行对比,由比较器的输出结果和相应指针有效信号的并集作为前推控制信号,如图2所示: 图2 前推类型 在处理器的设计过程中,根据前推种类的不同,给整数、取存、循环流水线都加入定向的数据通路及数据相关检测控制,实现对写回、执行流水级的运行结果的前推。 假如在DSP中存在以下的汇编指令: 0 mov d0, #1; 1 add d1, #1; 2 mov d2, d0; 3 mov d0, #3; 4 mov.a a1, d1; 5 st.w d0,[a0+]2; 6 mov d2 #4; 7 madd d0, d1, d2, d3; W—>D :程序0在pc=3时才将数据写回寄存器d0,程序2在pc=2时,即需要读取d0数据,此时便通过W—D的数据通路将数据传送给程序2使用; W—>E :程序3在pc=6时才可以将数据写回,而程序5 的Store指令间接寻址时,访存地址在其执行阶段才能算出,故Store指令统一在其执行阶段读取寄存器数据,而此时由于M1指令的d0结果尚未写回到寄存器,因此将其值通过相应的数据通路前推给Store指令,使得Store指令不必等待,流水线继续执行。 E—>D :程序7在程序6处于执行阶段时即用到其执行结果,因此在pc=8时将程序6的执行结果由E—D的数据通路前推给程序7。 2.2寄存器冒险控制 当前条指令的执行结果在当前指令读取源操作数时尚未运算得到时,便无法采用前推控制来解决数据相关,故本控制机制同时加入了寄存器冒险控制对其进行完善,两者结合以解决各种情况下的数据冲突的消除。 寄存器冒险按其相关性可以分为两种:写后写(WAW)和写后读(RAW),同时根据发生数据相关的流水线的不同,将寄存器冒险分为具体的11种,分别用hazardx 表示。再将冒险信号进行one-hot编码,得到11bit的向量信号,将其传送到流水线控制模块,实时控制模块在冒险信号有效时,针对相应的机制改变流水线状态,对流水线进行控制。 2.2.1写写冲突的控制机制 为了实现准确的数据控制,首先根据数据冲突的特征分类,在发生相关时根据分类生成相应的寄存器冒险信号,具体如下: (1) 整数流水线内部数据相关,发生在两条连续指令,MAC指令在前,非MAC在后,都在整数流水线中执行,由于MAC指令的执行需要两个周期,而普通IP指令只需一个执行周期,若两条指令的写回地址一致,在其写回周期写回冲突,生成Hazard冒险信号。Hazard有效使得流水线控制模块将非MAC指令的写回周期推迟一个周期; (2) 整数流水线与取存流水线写回相关,当一条数据运算指令与一条取存指令配对发射时,若两条指令的写回寄存器地址一致,在写回周期对同一个寄存器写回数据,即生成冒险信号Hazard2。流水线控制模块检测到冒险信号有效,保持整数流水线不变,取消当前取存指令的译码并在下个周期往取存流水重新注入该取存,使得取存指令被推迟一个周期写回; (3) 循环流水线与取存流水线写回相关,LOOP/LS双发射时,若两条指令的写回寄存器地址一致,生成冒险信号Hazard3,将LOOP流水线中的指令执行结果推迟一个周期写回。 当整数流水和循环流水线双发射时发生写写冲突时具体的控制,如图3所示: mov d0, #2; M ld.w d0, [a0+]2; L
图3写写冲突流水线 Microcomputer Applications Vol. 27, No.11, 2011 技术交流 微型电脑应用 2011年第27卷第11期
·58·以上两条指令在第3周期内同时往寄存器d0写回数据,产生了寄存器写回冲突,此时寄存器指针比较器结果为高,同时各寄存器指针有效,逻辑与结果为高,生成冒险信号Hazard3。流水线控制模块检测到冒险有效信号,从而将指令L推迟一个周期,使其在第4周期往d0写回数据。 写写冲突的控制机制为:生成相对应的冒险信号,流水线控制模块将三条流水线当前处于执行阶段的指令正常写回,同时取消三条流水的后续操作,将处于译码阶段且在指令集中后发射的指令推迟一个周期写回数据。 2.2.2 读写冲突的控制机制 与写写冲突一致,读写冲突处理步骤为生成不同的冒险信号,交由流水线控制模块具体操作。此时的控制机制如下: 当双发射的整数流水线与取存流水产生了读写冲突时,三条流水线状态,如表1所示: 表1流水线状态 流水线 循环 整数 取存 状态 正常 注入 取消并注入 流水线控制模块取消流水线中处于译码阶段的指令,并在下个周期往整数流水线和取存流水线分别注入指令,以串行化双发射; 其他读写冲突的控制机制包括: 整数流水线内部的读写相关,即双执行周期的Mac指令与普通Ip指令的读写冲突,此时将Ip指令的译码推迟一个周期,在Mac指令第二执行阶段的下周期译码; 取存流水线内部的读写相关,即Store指令与下条Load指令EA(Memory访存地址)值一致。在Load指令译码阶段生成冒险信号Hazard;流水线控制模块使Load指令处于等待状态,等待两个周期直到Store的数据写回之后再进入执行阶段; 取存流水线与循环流水线之间的读写相关,在循环流水和取存流水双发射或三条流水线同时发射的时候产生,必须保证循环流水线中的循环指令有效。 DSP流水线三发射时读写冲突的处理机制,如图4所示: iloop add.a a5, a2, a3; A1 add d5, d2, d3; A2 loop a2, iloop; L