运动目标检测
基于混合高斯模型的运动目标平均背景法检测
景的情况下完成 运 动 目 标 的 检 测 , 但是该算法计 算复杂 , 并且需要专门的硬件才能运行此算法 , 不
6 7] ㊂帧差法是最为简单且 能用于实时 目 标 检 测 [ ] 8 , 运行速度最快 的 一 种 目 标 检 测 算 法 [ 但无论是
分法是运动目标检测算法中最主要也是最常用的
传统帧差法还是 其 改 进 算 法 , 都未能得需要克服天气 ㊁ 光照变 化等对检测带来 的 影 响 , 且检测结果对后续的处
1 2] ㊂目 前, 理影响较大 [ 光 流 法㊁ 帧差法和背景差
运动目标检测是将视频中的运动目标从背景
5 ㊂ 其中 , 光流法是根据目标运动速度 3 种算法 3 来实现对目标检 测 , 它可以在完全不知道运动场
第3 8卷 第5期 2 0 1 7年1 0月
J o u r n a l o fC h a n c h u nU n i v e r s i t fT e c h n o l o g yo g y
长 春 工 业 大 学 学 报
V o l . 3 8N o . 5 O c t . 2 0 1 7
: / / D O I 1 0. 1 5 9 2 3 . c n k i . c n 2 2 1 3 8 2 t . 2 0 1 7. 5. 0 2 j
基于混合高斯模型的运动目标平均背景法检测
刘丽伟 , 张宏美 , 薛春芳 , 满 涛
( ) 长春工业大学 计算机科学与工程学院 ,吉林 长春 1 3 0 0 1 2
摘
要 :首先采用平均背景法对混 合 高 斯 建 模 获 得 的 背 景 进 行 处 理 得 到 纯 净 的 背 景 , 然后在
当前图像与背景图像之间进行差分运算 , 最后通过轮廓筛选的方法去除目标图像中的干扰点 , 并通过形态学处理对目标中的间隙进行填充 , 获得完整目标 ㊂实验结果表明 , 对于运动目标及 停留的目标 , 该算法的识别率和误检率分别为 8 6. 7% 和 8. 3% ㊂ 关键词 :目标检测 ;混合高斯模型 ;平均背景 ;轮廓筛选 中图分类号 : T P3 9 1 文献标志码 : A ( ) 文章编号 : 1 6 7 4 1 3 7 4 2 0 1 7 0 5 0 4 2 1 0 5
视频检测和运动目标跟踪方法总结
视频检测和运动目标跟踪方法总结目前常用的视频检测方法可分为如下几类:光流法,时域差分法,背景消减法,边缘检测法,运动矢量检测法[2]。
一、光流法光流法[1]是一种以灰度梯度基本不变或亮度恒定的约束假设为基础对运动目标进行检测的有效方法。
光流是指图像中灰度模式运动的速度,它是景物中可见的三维速度矢量在成像平面上的投影,表示了景物表面点在图像中位置的瞬时变化,一般情况下,可以认为光流和运动场没有太大区别,因此就可以根据图像运动来估计相对运动。
优点:光流不仅携带了运动目标的运动信息,而且还携带了有关景物三维结构的丰富信息,它能够检测独立运动的对象,不需要预先知道场景的任何信息,并且能够适用于静止背景和运动背景两种环境。
缺点:当目标与背景图像的对比度太小,或图像存在噪音时,单纯地从图像灰度强度出发来探测目标的光流场方法将会导致很高的虚警率。
且计算复杂耗时,需要特殊的硬件支持。
二、时域差分法时域差分法分为帧差法和改进的三帧双差分法。
1.帧差法帧差法[8]是在图像序列中的相邻帧采用基于像素点的时间差分, 然后阈值化来提取出运动区域。
视频流的场景具有连续性,在环境亮度变化不大的情况下,图像中若没有物体运动,帧差值会很小;反之若有物体运动则会引起显著的差值。
优点:时域相邻帧差法算法简单,易于实现,对背景或者光线的缓慢变化不太敏感,具有较强的适应性,能够快速有效地从背景中检测出运动目标。
缺点:它不能完全提取运动目标所有相关像素点,在运动实体内部不容易产生空洞现象。
而且在运动方向上被拉伸,包含了当前帧中由于运动引起的背景显露部分,这样提取的目标信息并不准确。
2.三帧双差分法三帧双差分法与相邻帧差法基本思想类似,但检测运动目标的判决条件上有所不同。
三帧双差分较两帧差分提取的运动目标位置更为准确。
三、背景消减法背景消减法[4]是将当前帧与背景帧相减,用阈值T判断得到当前时刻图像中偏离背景模型值较大的点,若差值大于T则认为是前景点(目标);反之,认为是背景点,从而完整的分割出目标物体。
运动目标检测和跟踪的研究及应用
在人所感知到的环境信息中,视觉信息占了非常大的比重,其中动态视觉信息更是其主要组成部分.感知环境中的这些动态视觉信息已成为计算机视觉的一个重要的研究方向.运动目标检测与跟踪是应用视觉和运动图像编码研究领域的一个重要课题,在许多领域有着广泛的应用. 本文主要研究了基于DSP的运动目标检测与跟踪问题,包括硬件平台的构建和运动检测跟踪算法软件设计与实现. 在运动目标检测部分,介绍了现有的几种常用的检测算法,针对传统帧差算法,检测出的运动目标不够完整的缺点,进行了改进;针对传统的背景重建算法运算量大,耗时的缺点,提出基于块的背景重建,均通过实验验证了方法的有效性. 在运动目标跟踪部分,首先介绍了Kalman滤波的基本原理,在此基础上提出了基于Kalman滤波的跟踪算法;然后详细分析了本文目标跟踪系统所采用的波门算法,为后面系统的实现打下了理论基础. 详细介绍了基于DAM6416P图像处理平台的跟踪系统的实现, 整个系统工作过程为DSP先对采集到的图像进行预处理,然后采用帧差法检测运动目标,接着采用基于双波门算法根据目标的质心位置来判断是否移动云台以及云台移动方向,从而实现对运动目标的实时跟踪. 从实验数据与结果看,本文研究的跟踪系统在一定条件下能够准确、及时地检测跟踪目标,达到了预期效果.
2.学位论文何西华视频运动目标检测与跟踪算法研究2008
视频环境的运动目标检测与跟踪是当前计算机视觉研究中一个非常活跃的领域。计算机视觉研究的目标是使计算机具有通过一幅或多幅图像认知周围环境信息的能力。运动图像序列中包含了比静态图像更多的有用信息。运动对象的检测与提取,是将视频图像序列划分成若干的运动对象,并在时间轴上对这些运动对象进行跟踪,为以后的研究工作奠定基础,如基于对象的编码技术以及基于内容的视频检索等。目标跟踪则是随着数字视频技术的发展及应用而产生的一个新的研究课题,其在军事以及民用等诸多领域中有着广泛的应用。 本文主要研究了基于视频序列运动目标检测与跟踪的基本理论和关键技术。重点研究背景模型下运动目标的检测和提取,运动目标阴影的处理,以及运动目标跟踪等方面的内容。 论文首先对的相关背景知识作了介绍。其中包括目标检测与跟踪系统中采用的运动约束假设和外部环境约束假设;目标检测技术采用的主要算法,包括静态图像中的目标检测和运动目标检测;目标跟踪基础知识,包括跟踪的基本概念,目标的常用的四种表示方法等。 在运动目标检测研究方面,首先介绍了当前主要目标检测和提取算法的原理,通过试验对帧间差分法和自适应背景相减法进行分析。在此基础上提出将背景减除与帧间差分方法结合的目标检测算法。实验表明,该方法能够在较大程度上满足系统的要求,提高检测结果精度。针对阴影对目标检测造成的不利影响,最后本论文还总结了目标抑制阴影的几种算法。 在运动目标跟踪研究方面,首先归纳了在目标跟踪中常被采用的视觉特征、统计特征、变换系数特征和代数特征;分析了目标的三种线性运动模型;阐述了目标特征搜索匹配的主要算法,并重点研究了基于目标颜色直方图特征的均值偏移目标跟踪算法(Mean-ShiftAlgorithm),在此基础上提出了一种联合目标位置预测的改进的跟踪算法,通过对均值偏移算法和改进的跟踪算法通过的分析和实验比较,表明本论文的改进跟踪算法较均值偏移跟踪算法由于利用了目标的空间位置信息,提高了目标跟踪的可靠性和有效性。
动目标显示与动目标检测
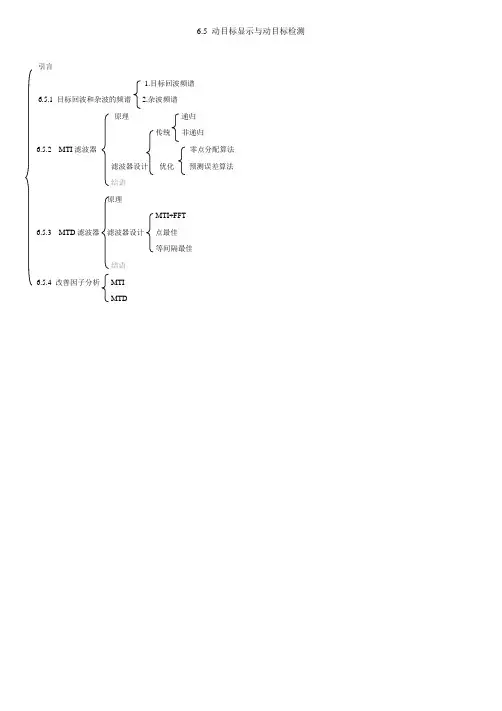
6.5 动目标显示与动目标检测引言1.目标回波频谱6.5.1 目标回波和杂波的频谱 2.杂波频谱原理递归传统非递归6.5.2 MTI滤波器零点分配算法滤波器设计优化预测误差算法结语原理MTI+FFT6.5.3 MTD滤波器滤波器设计点最佳等间隔最佳结语6.5.4 改善因子分析MTIMTD6.5 动目标显示与动目标检测雷达探测的运动目标如飞机,导弹,舰艇,车辆等周围存在各种背景,包括不动的地物和运动着的云雨,海浪或金属丝干扰等。
动目标显示(Moving Target Indicator :MTI )与动目标检测(Moving Target Detection: MTD )就是使用各种滤波器,滤去这些背景产生的杂波而取出运动目标的回波。
此外也可以通过把雷达安装在山上、增加雷达天线的倾角、安装防杂波网来阻止杂波进入天线;或通过调整雷达天线的波束形式、采用极化技术、降低雷达的分辨单元、在时域采用CFAR 检测、自适应门限、杂波图来抑制杂波。
在频域上应用MTI 与MTD 技术可以提高信杂比,改善杂波背景下检测运动目标的能力。
本节首先分析目标回波和杂波的频谱特性;然后分别讨论MTI 与MTD 原理及滤波器设计方法;最后分析MTI 与MTD 对改善因子的提高。
6.5.1 目标回波和杂波的频谱运动目标回波和杂波在频谱结构上有所差别,运动目标检测就是利用这种差别,从频率上将它们区分,以达到抑制杂波而显示目标回波的目的。
为此,应首先弄清楚目标和杂波的回波的特性。
(1) 目标回波的频谱雷达发射相参脉冲串,其脉冲宽度为e T ,脉冲重复频率为r f 。
当天线不扫描而对准目标时,所得脉冲为无限脉冲串。
调制信号)(1t u 及其频谱)(1f U 分别为∑∞-∞=⎪⎪⎭⎫⎝⎛-=n e rTnT t rect A t u )(1 (6.5.1)∑∞-∞=-=n r e e r e f n f T f T f T AT f U )()sin()(1δππ (6.5.2)A 为信号振幅。
铁路入侵运动目标实时检测技术
6 4 . 7 8 %和 2 2 . 5 8 %, 且算 法具有较强的 实时性和鲁棒 性。
关键词 : 铁路入侵 ; 智 能 视 频技 术 ; 运 动 目标检 测 中 图分 类 号 : T f r 7 5 1 文献标志码 : A 文章编号 : 1 6 7 2— 7 0 2 9 ( 2 0 1 3 ) 0 6— 0 H6— 0 5
李家才, 陈治 亚 。 王梦 格
( 中南大学 交通运 输 工程 学院 , 湖 南 长沙 4 1 0 0 7 5 )
摘 要: 针 对 铁 路 场 景 下 入侵 异 物 的特 点 , 采 用 智 能 视 频技 术 , 对 监 控 视 频 图像 序 列 中入 侵 运 动 目标 检 测 方 法 进 行 研 究 . 提
第 1 0卷
第 6期
铁 道 科 学 与 工 程 学报
J oURNAL OF RAI L 、 ^ 『 AY S CI ENCE AND ENGl NEERI NG
V O I . 1 O NO . 6 De c .2 0 l 3
2 0 1 3年 1 2月
铁 路 入 侵 运 动 目标 实 时检 测 技 术
mo v i n g t a r g e t i n t h e v i d e o i ma g e s e q u e n c e w a s s t u d i e d b a s e d O U i n t e l l i g e n t v i d e o t e c h n o l o g y .T o r e a l i z e r e a l —
针对运动目标实时检测的改进码书模型算法
dfc l t b ue i e 1i i o e vrn n o i ’h曲 c mp tt n l i ut o e sd n a t i f r . me vd n i me t fr t i e o s o ua o a i
c mp e i , o e o k i r v d mo ei g me h d i e l i p l a i n i r s n e . o lx t ac d b o y mp o e d l t o r a — me a p i t p e e t d n n t c o s F r t p r mee s a d mo e i g m eh d o e c d b o r p i z d Th n a me h d i , a a t r n d l t o f h o e o k a e o t s n t mi e . e , t o t e n o ma i n b o k u c l s p e e td wh c alb s d t e a k r u d o g t i f r t l c s q ik y i r s n e , i h C l e u e o g t b c g o n o
C d bo k pr v d m olngm e ho o e ltm e o e o i m o e dei t d f rr a —i
m o ngt r e t c i n vi a g tde e to
W e- u ig o GONG, i n・a g LI - x a - n U g
21 0 0全 国计算机 网络 与通信 学术会议
针对运 动 目标 实时检测 的改进码 书模型算法
刘先 刚 龚卫 国
( 重庆大学光电技 术及 系统教育部重点实验室 重庆 4 0 4 ) 004
MATLAB中的运动检测与目标追踪方法
MATLAB中的运动检测与目标追踪方法引言运动检测和目标追踪是计算机视觉领域的重要研究内容之一。
通过使用MATLAB等工具,可以实现各种运动检测和目标追踪算法,以应用于视频监控、自动驾驶等领域。
本文将介绍MATLAB中常用的运动检测与目标追踪方法,包括光流法、帧差法、背景建模法等,并探讨它们的优缺点及应用场景。
一、光流法光流法是一种通过分析连续两帧图像中像素的运动来检测运动的方法。
其核心思想是计算每个像素点在两帧图像中的位移向量,从而得到运动信息。
MATLAB中提供了光流法的实现函数,例如vision.OpticalFlow和opticalFlowLK等。
光流法的优点是计算简单,对算法要求不高,可以很容易地处理多对象的运动,适用于快速移动的目标。
然而,由于其基于两帧图像的位移变化进行计算,对于长时间运动或场景变换较大的情况下,光流法容易产生累积误差。
二、帧差法帧差法是一种通过比较连续两帧图像的像素值来检测运动的方法。
其基本原理是通过计算两帧图像之间的差异,得到表示目标位置的二值图像。
MATLAB中的imabsdiff函数可以方便地实现帧差法。
帧差法的优点是实时性好,对于动态场景具有较好的适应性。
然而,由于该方法是基于像素值差异来检测运动,对于光照变化、场景噪声等因素较为敏感,容易产生误检测的问题。
三、背景建模法背景建模法是一种通过将场景背景与前景目标进行分离,从而检测目标运动的方法。
其核心思想是先建立环境的背景模型,然后将当前帧图像与背景模型进行比较,得到表示前景的二值图像。
在MATLAB中,可以使用vision.ForegroundDetector函数实现背景建模。
背景建模法的优点是对于静态场景具有较好的适应性,能够有效抑制光照变化和场景噪声带来的干扰。
然而,该方法对于场景动态变化较快、背景模型建立较为困难的情况下,容易产生误检测和漏检测的问题。
四、区域增长法区域增长法是一种通过将连续像素点聚类,从而检测目标区域的方法。
运动目标检测方法概述
运动目标检测方法概述作者:景阳黄柔周婧琳来源:《计算机光盘软件与应用》2012年第23期摘要:随着社会的发展,人们获取的信息途径越来越多,单纯的依靠人类的五官已不能及时的将我们获取的海量信息进行甄别和判断,因此计算机技术基础上发展的图像处理技术为我们生活、工作中的信息处理提供了很大的帮助,其在社会中的作用也越来越凸显。
其中,运动目标检测技术是整个图像处理技术的基础性环节,直接关系到后续信息处理的成败。
本文主要介绍了目标检测的常用算法的原理以及它们的优缺点,并对其中的帧间差分法和背景减除法进行了仿真实验,以验证其优缺点。
关键词:运动目标检测算法;帧间差分法;背景减除法中图分类号:TP391 文献标识码:A 文章编号:1007-9599 (2012) 23-0000-031 引言运动目标检测技术是图像处理技术中的关键基础技术[1],利用运动目标检测技术可以对视频图像中感兴趣的目标进行实时地检测、识别、提示报警,是进一步视频图像处理的重要依据。
运动目标检测技术已经广泛应用于智能视频监控、犯罪预防、智能分辨、自动制导等安防、军事领域[2]。
运动目标检测是将运动目标从视频序列图像背景中分离出来。
各类实际应用需求的不断增多,大大地推动了运动目标检测技术的发展,产生了许多成熟的目标检测算法。
一般我们会把运动目标检测区分为动态环境下和静态环境下,由于动态环境处理较为复杂,所以本文主要介绍静态环境下的目标检测算法。
2 运动目标检测常见方法静态环境下的运动目标检测是指将视频序列中的图像分割为背景图像和前景图像[1],提取其中存在变化的区域为前景图像,即运动目标或称感兴趣区域,而没有发生变化的区域为背景图像。
能否准确地检测出监控场景中的运动目标直接影响了后续目标跟踪和行为分析等效果的好坏,因为目标检测提取出来的像素是后续处理分析的主要对象,是分析与处理的基础。
虽然,在视频监控场景中,监控环境情况十分复杂,但每个运动图像都具有独特的可供计算机识别的特点,计算机利用这些特点就可以将前景图像检测出来。
动态背景下的运动目标检测
中图分类 号 : T P 3 1 文献标 识码 : A 文章编 号 : 1 6 7 3 — 6 2 9 X ( 2 0 1 3 ) 0 7 — 0 1 0 4 — 4 0
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 3 — 6 2 9 X. 2 0 1 3 . 0 7 . 0 2 6
g o it r h m o f p h a s e c o r r e l a i t o n nd a F o u ie r r —Me l l i n ra t ns f o r m t O e s t i ma t e t h e g l o b a l mo t i o n v e c t o r . S co e n d l y, us e b i l i n e a r i n t e r po l a t i o n me h— t
基于OpenCV的运动目标检测与跟踪算法仿真与分析毕业设计论文
摘要在当今社会,安全问题越来越受到人们的关注,而视频监控是保障人民群众生命财产安全的重要技术手段,同时也是目前计算机视觉与模式识别领域的研究热点之一。
视频监控历经了普通监控、网络监控到现在的智能监控三个发展阶段。
近几年来,智能监控在交通、银行、博物馆等安全性要求比较高的场所发挥了举足轻重的作用。
但由于其应用范围的广泛性、应用场景的多样性,就其技术而言仍未达到人们所期望的要求。
其算法实时性、稳定性情况还不甚理想,受雨雪等恶劣天气的影响也比较大,还需要进一步研究出更好的算法,因此它是一个十分有意义的课题。
本文设计了基于opencv的运动目标检测与跟踪系统。
进行了大量的实验,并在实验中通过多次改进系统的结构和相关的算法,达到了提高系统实时性的目的。
该系统能够打开视频文件,并对视频文件中的运动物体进行实时有效检测与跟踪。
本文的主要工作包括:在运动目标检测阶段,本文介绍了目前常用的背景差法、帧间差分法、光流法,并通过实验对其进行了多次改进,最终采用了自适应背景更新算法、以及最经典的混合高斯背景建模算法进行运动检测。
在运动目标跟踪阶段,本文利用了颜色范围和面积大小这两个简单的特性来识别目标,在满足了识别要求的前提下,大大提高了识别的速度,再一次提升了系统的实时性;在目标跟踪阶段采用Meanshift的改进算法Camshift,并根据实验结果对算法中的优缺点进行分析。
关键词:运动目标检测,运动目标跟踪,OpenCV,高斯背景建模算法,Camshift算法。
AbstractToday,security problems are becoming increasingly subject to people’s attention.Video surveillance is the most important technical means to protect people’s lives and property.It is also the most popular problems in the computer vision and pattern recognition research fields. Video Surveillance has developed three stages as the common surveillance,the network surveillance and the intelligent surveillance.In recent years,the intelligent video surveillance has played great importance in the field of Traffic,Bank,Museum and so on which have a high safety requirements.But because of the extensive and diversity of its application,as for the technology,it has not reached the expected requirements of the people.On the other hand,the stability and real-time performance of the algorithms are not so satisfied;the result is still affected by the bad weather as rain and snow.So,better algorithm is needed.Therefore,it is one of the most valuable topics.This article is designed based on the opencv moving target detection and tracking system. Done a lot of experiments and experiments through several improvements in the structure and related algorithms,to improve the system of real-time purposes.The system is able to open video files,and video files in real-time moving object detection and tracking effectively.The main work includes:the moving target detection phase,the paper describes the current common background subtraction,inter-frame difference method,optical flow,and through experiments carried out many improvements,finally adopted adaptive background updating algorithm,and the most classic Gaussian mixture background modeling algorithm for motion detection.In moving target tracking phase,the scope of this paper,the color and size of the size of these two simple features to identify the target,to meet the identification requirements under the premise,greatly improve the recognition rate,once again enhance the system in real time;in Meanshift tracking stage using the improved algorithm Camshift,and the experimental results of the algorithm to analyze the advantages and disadvantages.Key words:Moving target detection,target tracking,OpenCV,Gaussian background modelingalgorithm,Camshift algorithm.目录1绪论......................................................................11.1课题研究的背景和意义...................................................11.2国内外研究现状.........................................................11.3技术发展难点与趋势.....................................................21.4论文结构安排...........................................................32编程工具介绍..............................................................42.1opencv2.4.3简介.......................................................42.2opencv视频处理........................................................42.2.1OpenCV中处理图像Mat类............................................52.2.2OpenCV中读取视频VideoCapture类...................................62.3opencv编程环境配置....................................................62.3.1配置Windows环境变量..............................................62.3.2在VisualStudio2010中建立MFC对话框..............................72.3.3配置OpenCV函数库..................................................73运动目标检测..............................................................93.1概述...................................................................93.1.1帧间差分法.........................................................93.1.2背景差法..........................................................93.1.3光流法...........................................................103.2自适应背景更新算法....................................................113.2.1原理..............................................................113.2.2流程.............................................................113.2.3核心代码.........................................................123.2.4实验结果及分析...................................................133.3混合高斯背景建模算法.................................................153.3.1原理..............................................................153.3.2流程..............................................................163.3.3核心代码.........................................................173.3.4实验结果及分析...................................................174运动目标跟踪.............................................................214.1概述..................................................................214.2均值漂移MeanShift算法...............................................224.2.1原理..............................................................224.2.2流程图............................................................234.3Camshift算法.........................................................234.3.1原理..............................................................234.3.2流程图............................................................254.3.3核心代码.........................................................254.4实验结果及分析........................................................275软件的设计与仿真.........................................................296全文总结与展望...........................................................32参考文献...................................................................33翻译部分...................................................................35英文文献.................................................................35中文译文.................................................................45致谢.....................................................错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大者表示有较小的方差与较大的出现概率,说明这些点在1~t时 间段内出现的概率较大,因此这些分布可以作为背景的描述。
从由首权部重选wi取,t 和前阈B值t 个T高斯(0分,1)布决作定为:该B点t 处ar的g背m景in模(型b w,i,t时变T )参数 Bt
b
i 1
运动目标检测的方法
背景相减法 背景相减法是目前运动检测中最常用的一种方法,
帧间图像补偿
全局运动参数矩阵M代表的是背景的运动,即 摄像系统的旋转、水平和垂直偏移运动。对当 前帧的像素坐标利用M矩阵进行变换,得到新 的坐标,并将原图中像素赋给该新坐标,即可 获取补偿后的结果图像,实现对帧间背景运动 的校正。
混合高斯模型建模
假设图像中的每一点的像素观测值和其他像素
点的观测值相互独立,在某时刻t,设像素点 的观测值为 Xt ,则时刻t观测值为Xt的概率可 以用具有K个高斯分布的混合高斯模型建模:
滑函数
是高斯平
得到一个二阶实对称矩阵M=[A,C;C,B],必然存在两个特征值
代表2 自相关的主曲率。
和1
,
提取特征点
如果特征值1和2是极大值时,则点(x,y)是一个特征点。
即满足:R det(M ) k • trace2 (M ) T ,其
中,det M 1 2,traceM 1 ,2 这里T是
运动目标检测的简介 运动目标检测的预处理
帧间背景校正 混合高斯模型建模
运动目标检测的方法 卡尔曼滤波 粒子滤波
运动目标检测的简介
运动目标检测是指在序列图像中检测出变化区 域并将运动目标从背景图像中提取出来。
通常情况下,目标分类、跟踪和行为理解等后 处理过程仅仅考虑图像中对应于运动目标的像 素区域,因此运动目标的正确检测与分割对于 后期处理非常重要。
由于场景的动态变化,如天气、光照、阴影及 杂乱背景干扰等的影响,使得运动目标的检测 与分割变得相当困难。运动检测分为静态背景 和动态背景两类。
常用的方法有帧差法、光流法、背景减除法等。
运动目标检测的预处理
帧间背景校正——首先对相邻帧进行全局运动 估计,补偿当前帧以实现背景校正 背景建模——混合高斯模型建模
斯分布的均值向量, i,t 是其相应的协方差
矩阵, 是高斯分布的概率密度函数 。为
了减少计算量,通常假定(R,G,B)三个颜色通
道是相互独立的,并且具有相同的方差,这样,
协方差矩阵就有下面的形式:
i,t
2 i,t
I
假设图像中某像素点,在1~t时刻的状态为
X1, X2,..., Xt,权重wi,t 反应了像素点从1~t时间
光流法
光流是空间运动物体被观测面上的像素点运动产 生的瞬时速度场,基于光流方法的运动检测采用了运 动目标随时间变化的光流特性,通过计算位移向量光 流场来初始化基于轮廓的跟踪算法,从而有效地提取 和跟踪目标。该方法的优点是在摄像机运动存在的情 况下也能检测出独立的运动目标。然而,大多数的光 流计算方法相当复杂,且抗噪性能差,如果没有特别 的硬件装置则不能被应用于视频流的实时处理。
基本思想是将输入的图像与背景图像或背景模型进行 比较,通过判定灰度特征的变化,或用直方图等统计 信息的变化来分割运动目标。它一般能够提供最完全 的特征数据,但对于动态场景的变化,如光照和外来 无关事件的干扰等特别敏感。传统的背景相减法包括 背景模型的建立,目标决策和背景模型更新三个步骤。
帧间差分法
帧间差分法是在连续的图像序列中两个或三个相 邻帧间采用基于像素的时间差分并且阈值化来提取出 图像中的运动区域。使用基于时间序列图像上的差分 图像检测运动目标,能够较好的适应环境变化大的情 况,但对于图像序列中运动缓慢的目标其检测效果不 好,难以有效的检测出图像序列中与运动目标相对应 但变化相对较小的像素点,运动实体内部容易产生空 洞现象。
一个固定的阈值,参数k=0.04~0.06。。减号后面的部分是修正, 目的是抑制边缘点的误检。
特征点匹配
在当前帧找到参考帧中每一个特征点的唯一匹配点。
step1:以特征点pk 为中心,将其领域构造一个尺寸为M N的
模ste板p2图:像在I1当作前为图特像征中窗对应位置处,确定(M+2p) (N+2p)的搜索
step4:找出最小的SAD值,则其对应位置为 匹配特征窗,其中心点即为匹配特征点
全局运动参数计算
假定参考帧中点 x, y
T运动到当前帧的位置
xˆ, yˆ
T
则对应的坐标关系为:
xˆ yˆ
m0m1 m3m4
x
y
m2 m5
其中m2和m5表示两图的平移量,m0,m1,m3,m4表示尺度和旋转量, 即为图像仿射变换模型。 将特征点代入,求最小二乘解,求解的目标是使得各特征点的位置误差 达到最小。
段内满足第i个高斯分布的后验概率,X1, X2,..., Xt
中属于第i个高斯分布的观测样本越多,权重 wi,t
就越大,方差 i,t越小。
根据场景中任意点处大部分时间都呈现背景,而运动目标只是短 暂出现的基本认识,对背景进行建模:把
K个高斯分布按照 wi,t i,t
值从大 到小排序,wi,t
i,t
K
P( X t )
wi,t ( X t , i,t ,
i,t )
i 1
(Xt , i,t ,
i,t )
1
n
(2 ) 2
1
exp{
1 2
(Xt
i,t
)T
i,t 2
1 i ,t(X Nhomakorabeat
i,t )}
K是是第高i个斯高分斯布分的布个的数权,重一,般去i ,t3是至时5个刻,t第wi个i ,t高
帧间背景校正
特征点提取
采用经典的Harris算子提取参考帧的特征点,
计算图像亮度I(x,y)在点(x,y)处的梯度: X I (1, 0,1)
Y
I
(1, 0,1)T
构造自相关矩阵
A X 2 w, B Y 2 w, C ( XY ) w
表示卷积算子, w exp((x2 y2 ) / 2 2 )
区域 I 2,其中p表示设定的水平和垂直方向最大偏移量
step3:从搜索区域的中心开始搜索,搜索路径采用菱形法,计 算每点的绝对误差和SAD(Sum of Absolute Difference)值,其 计算公式
MN
SAD(i, j) I1(m, n) I2 (m i p, n j p) (i, j p,.....p) m1 n1