BM算法与WM算法的比较
SVPWM控制算法研究与实现
机
电
工
程
第2 8卷
基本 空 间 电压矢 量如 图 2所 示 , 它包 括
~U 。 6个
可得 :
有效 空 间矢 量和 £ 。、 , 。 …两个 零 矢 量 , 中有 效 矢 量 。 其 的模 长 为 2 3 零 矢量 的模 长为 零 。 U/ ,
" i T
=
=
p r t r a ao .
Ke od :pc et uewdhm dlt n( V WM) s eus wdhmouao ( P yw rs saevc r s it oua o S P op i ; i p l i d ltn S WM) hg vl f cv ;o vl f ci n e t i ; i l e e ete l l e eet e h e f i w e f v
SP V WM 控 制 算 法 研 究 与 实 现
何 凯航
( 江工 业 大学 教科 学 院 , 江 杭州 3 0 2 ) 浙 浙 10 3
摘要 : 为解决 电机控制 中普通正 弦脉宽 调制 ( P S WM) 下谐 波分量低 、 电压利用率低及 数字化实现 比较复杂 等问题 , 空 间矢 量脉宽 将
( o eeo d ct n Z e a gU iesyo eh o g H nzo 10 3 hn ) C l g f u ai , hj n nvri f c nl y, a gh u3 0 2 ,C ia l E o i t T o
A src: re o ete r l so gn rlieus i hm d l i ( P bta tI odrosl o e f eea s p l wd o u t n S WM)m d l i o r ot l sc s m lhr nc n t v hpbm n e t ao oua o i m t nr , uha a a tn n o c o s l moi
基于改进灰狼算法的多任务优化算法

基于改进灰狼算法的多任务优化算法史光伟,王启任(天津工业大学电子与信息工程学院,天津300387)摘要:针对已有多任务优化算法寻优精度受限、计算时间成本过高等问题,提出一种基于改进灰狼算法的多任务优化算法(improved grey wolf algorithm based multitask optimization algorithm ,IGWMTO )。
该算法采用灰狼算法代替典型多任务算法中的遗传算法,计算个体的因素等级和技能因子实现狼群分类,并以此更新个体隶属任务,引入扰动因子和动态权重改善狼群个体的更新方式。
仿真测试结果表明:相比于传统多任务优化算法,所提算法在4个优化问题上的寻优精度的提升均超过了4.8%,计算耗时降低了70%以上。
关键词:多任务优化;群体智能优化算法;灰狼算法;寻优精度中图分类号:TP18文献标志码:A文章编号:员远苑员原园圆源载(圆园23)园5原园园81原06收稿日期:2022-06-02基金项目:天津市自然科学基金资助项目(19JCQNJC03300);天津市研究生科研创新项目(2020TJSS014)通信作者:史伟光(1985—),男,博士,副教授,主要研究方向为射频定位,群体智能感知计算。
E-mail :************************.cn Improved grey wolf algorithm based multitask optimization algorithmSHI Weiguang ,WANG Qiren(School of Electronics and Information Engineering ,Tiangong University ,Tianjin 300387,China )Abstract :Aiming at the problems of limited optimization accuracy and high computational time of existing multi-task opti鄄mization 渊MTO冤algorithms袁an improved grey wolf algorithm based multitask optimization algorithm 渊IGWM鄄TO冤is proposed袁which utilizes the grey wolf algorithm instead of the genetic algorithm in the typical multi-task optimization algorithm.The factor level and skill factor of the individual are calculated to achieve wolf group clas鄄sification and update the individual membership task.Then袁the disturbance factors and dynamic weight are in鄄troduced to improve the update method of individual wolves.The simulation results show that袁compared with thetraditional multi-task optimization algorithm袁the proposed algorithm improves the optimization accuracy by morethan 4.8%on all four optimization problems袁and the computational time reduces by more than 70%.Key words :multi-task optimization曰swarm intelligence optimization algorithm曰gray wolf algorithm曰optimization accuracy近年来,多任务优化(multi -task optimization ,MTO )[1-6]已经成为智能优化领域的新兴研究方向,MTO 关注如何同时解决多个优化问题并提高独立解决各问题的性能,在图像处理[7]、路径规划[8]和互联网[9]等领域MTO 技术已经展现出优势。
基于非正交坐标系下的SVPWM改进算法研究
摘 要 : 分 析 传 统 的 基 于 直 角 坐 标 系的 空 间 矢 量 脉 宽调 制技 术 ( V WM) 基 本 原 理 及 缺 点 , 出 一 种 基 于 SP 的 提
非正 交的斜 角坐标 系的 S P V WM改进算法 。该改进算法是将 直角坐标 系转换为 p g斜角坐标 系, 这样使得 电压 参 考 矢 量在 进 行 扇 区判 断和 开 关 矢量 作 用 时 间 的计 算上 都 减 少或 避 免 了三 角 函数 计 算 , 降低 了运 算 量 , 约 了运 节 算时间, 更容 易数字 实现。仿 真结果验证 了该算法的可行性 。
式 中: , , —— 每 个 开 关 矢 量 的 作 用 时 间; = + + —— 脉宽调制周期 ; d U —— 直流母
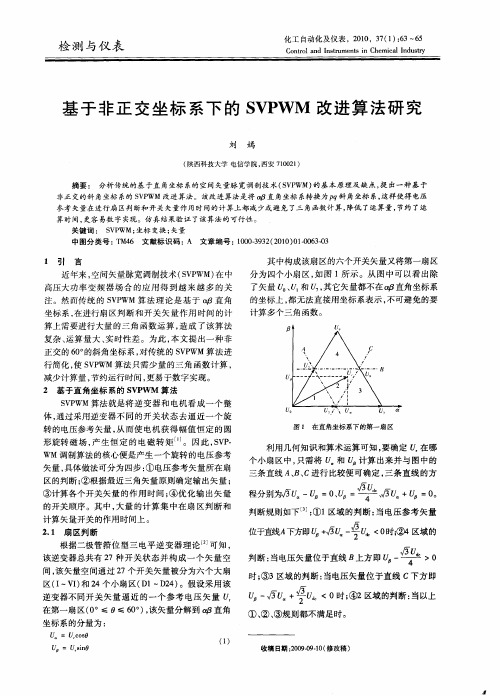
2 1 扇 区判 断 .
利用几何知识 和算术运算司知 , 要确定 在 哪 个小扇 区中 , 只需将 和 计算 出来并 与 图中的
三条直线 A B C进行 比较便可确定 , 、、 三条 直线 的方 程分别为 一 :0 : 、 + :0 。
判断规则如下 : ①1区域 的判断 : 电压参考矢 量 当 位于直线 下方即 + 一 < 时; 0 ②4区域的
的坐标上 , 都无法直接用坐标系表示 , 不可避免 的要
计算 多个三 角函数 。
正交 的 6 。 0 的斜 角坐标 系 , 对传统的 S P V WM算法进 行简化 , S P 使 V WM算法 只需少量 的三角 函数计算 ,
减少计算量 , 节约运行 时间 , 更易 于数字实现 。 2 基于直角坐标 系的 S P V WM 算 法
关键词 : S P V WM; 标 变换 ; 坐 矢量
中 图分 类 号 : M 6 文 献 标 识 码 : T4 A 文章 编 号 : 003 3 ( 00 0 枷 6 3 10 —9 2 2 1 ) 1 3
问题描述n个作业{1,2,…,n}要在由2台机器M1和M2组成的流
业集S在机器M2的等待时间为b(1)情况下的一个最优调度。则
(1),’(2),…,’(n)是N的一个调度,这个调度所需的时间 为a(1)+T(S,b(1))<a(1)+T’。这与是N的最优调度矛盾。故
T’T(S,b(1))。从而T’=T(S,b(1))。即流水作业调度问题具有
最优子结构的性质。
3
流水作业调度
2. 递归结构
由流水作业调度问题的最优子结构性质可知:
T ( N ,0) min{a i T ( N {i}, bi )}
1 i n
T ( S , t ) min{ai T ( S {i}, bi max{ t ai ,0})}
iS
T(S,t)中的bi+max{t-ai,0}:
的最优值为m(i,j),即m(i,j)是背包容量为j,可选 择物品为i,i+1,…,n时0-1背包问题的最优值。由01背包问题的最优子结构性质,可以建立计算m(i,j)的 递归式如下:
j wn vn m(n, j ) 0 0 j wn
j wi max{m(i 1, j ),m(i 1, j wi ) vi } m(i, j ) 0 j wi m(i 1, j )
2
流水作业调度
1. 最优子结构性质
设是n个流水作业的一个最优调度,所需的加工时间为 a(1)+T’。其中T’是在机器M2的等待时间为b(1)时,安 排作业(2),…,(n)所需的时间。 记S=N-{(1)},则有T’=T(S,b(1))。
由T的最优性可知,T’T(S,b(1))。若T’>T(S,b(1)),设’是作
中文多模式匹配算法性能的分析与研究
( 1 . 成都 网安科技发展有限公 司, 四川 成都 6 1 0 0 9 2 ;
2 . 电子 科技 大学 示 范性软 件 学院 , 四川 成都 6 1 0 0 5 4 )
摘 要: 模 式 匹配算 法一 般不 具有所 有环 境 下的通 用 性 , 不 同 的算法 在不 同语 义环 境 下 的表 现 , 往往 差 异较 大 。为 实现 中
文环 境下 对模式 串 的快速 多模 式 匹配 , 选 择 出在 中文环 境 下 的最 优 匹 配 算法 , 分 析 了几种 经 典 的 多模 式 匹 配算 法 。通 过 对各 个算 法设 计思路 、 时 间性 能与 空间性 能 的研究 , 推 导 出基 于 “ 坏 字 符” 的算 法设 计思 路最 适用 于 中文 环境 下 大字 符集 、
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 3 - 6 2 9 X . 2 0 1 4 . 0 2 . 0 1 6
An a l y s i s a n d Re s e a r c h o f Ch i n e s e Mu l t i - p a t t e r n Ma t c h i n g
第2 4卷 第 2期 2 0 1 4年 2月
计 算 机 技பைடு நூலகம்术 与 发 展
COMP UTER TEC HNOLOGY AND DEVEL0P MENT
Vo 1 . 2 4 N o . 2 F e b . 2 0 1 4
中文 多模 式 匹配 算 法 性 能 的分 析 与研 究
h i n g, s e l e c in t g t h e o p ima t l ma t c h i n g a l go it r hm u n d e r t h e Ch i n e s e e n v i r o n me n t , a n ly a z e s e v e r a l c o mmo n mu l t i —p a t t e n r ma t c h i n g a l g o —
停泵水锤的计算方法详解

停泵水锤的计算方法详解停泵水锤计算及其防护措施停泵水锤是水锤现象中的一种,是指水泵机组因突然断电或其他原因而造成的开阀状态下突然停车时,在水泵及管路系统中,因流速突然变化而引起的一系列急剧的压力交替升降的水力冲击现象。
一般情况下停泵水锤最为严重,其对泵房和管路的安全有极大的威胁,国内有几座水泵房曾发生停泵水锤而导致泵房淹没或管路破裂的重大事故。
停泵水锤值的大小与泵房中水泵和输水管路的具体情况有关。
在泵房和输水管路设计时应考虑可能发生的水锤情况,并采取相应的防范措施避免水锤的发生,或将水锤的影响控制在允许范围内。
我院在综合国内外关于水锤的最新科研成果并结合多年工程实践的经验,以特征线法为基础开发了水锤计算程序。
这一程序可较好地模拟各种工况条件下水泵及输水管路系统的水锤状况,为高扬程长距离输水工程提供设计依据。
1 停泵水锤的计算原理停泵水锤的计算有多种方法:图解法、数解法和电算法。
其基本原理是按照弹性水柱理论,建立水锤过程的运动方程和连续方程,这两个方程是双曲线族偏微分方程。
运动方程式为:连续方程式为:式中H ——管中某点的水头V——管内流速a——水锤波传播速度x——管路中某点坐标g——重力加速度t——时间f——管路摩阻系数D——管径通过简化求解得到水锤分析计算的最重要的基础方程:H-H0=F(t-x/a)+F(t+x/a) (3)V-V0=g/a×F(t-x/a)-g/a×F(t+x/a) (4)式中F(t-x/a)——直接波F(t+x/a)——反射波在波动学中,直接波和反射波的传播在坐标轴(H,V)中的表现形式为射线,即特征线。
它表示管路中某两点处在水锤过程中各自相应时刻的水头H与流速V之间的相互关系。
为了方便计算机的计算,将上述方程组变换为水头平衡方程和转速改变方程,即成事故停泵时水泵的两个边界条件方程式:F1=PM-BQv+H n(β2+v2)(A0+A1x)-ΔH0v2/(τ2)=0 (5)F2=(β2+v2)(B0+B1x)+m0-C3(β0-β)=0 (6)式中β——N/N n(实际转速/额定转速)v——Q/Q n(实际流量/额定流量)通过上述两式的联立,采用牛顿—莱福生迭代公式,可以解出v和β的近似数值。
NPC三电平逆变器SVPWM算法的研究及仿真实现
Ab ta t s r c :Thr e lv li ve t ri n ft an c m p ne t fa me um— la ehi h p we y — e —e e n r e s o e o hem i o o n so di vo t g g o rs s t r ,a e n nd SVPW M l ort a g ihm s t y p r he e n W e d s u si hi t y t a i rncpls i he ke a tt r i . ic s n t ss ud he b sc p i i e
(. 国矿 业 大 学 信 电 学 院 , 苏 徐 州 1中 江 2 10 ;. 2 0 82 淮海 工 学 院 电子 工 程 系 , 苏 连 云 港 江 220) 2 0 5
摘
要 : 电平逆 变器是 中压 大功 率 系统 的主要 组成 部分之 一 , S WM 算法 又是 其 关键部 分 。 三 而 VP
论 述 了三 电平 空间 矢量算 法( VP S WM) 的基本 原 理 , 阐述 了其 与 两 电平算 法之 间的 关 系。在 此基
础上, 借鉴 了两电平空 间 矢量 算 法的仿 真 方 法 , 出 了在 Smuik环 境 下三 电平 空 间 矢量 算 法的 给 i l n
实现 方 法。最后给 出了两种调 制 下的仿真 结果 , 而验 证 了该方 法的正确 性和 可行性 。 从 关键 词 : 电平 ; VP 三 S WM 算法 ; i l k仿 真 Smui n 中图分类号 : M4 4 T 6 文献标识 码 : A
2 .De t o e to i a g n e i g p . fElc r n c lEn i e rn ,Hu i a n tt t fTe h o o y ah i s i e o c n l g ,Lin u g n 2 0 5,C i a I u a y n ag2 2 0 hn )
三相电压型PWM整流器差值SVPWM算法的仿真研究
1 三 相 电压 型 P WM 整流 器 的数 学模 型
三相 电压 型 P WM 整 流器 主电路 拓扑 结构 如 图 1 所示 。 根据 电压 、 电流 基 尔霍 夫 定 律 可 以得 到 三 相 静止 坐标 系 ( 口 , b , ) 中 的数 学方 程 为 :
引 言
采用 P R调节 器 直接对 正 弦 电流信 号进行 控 制 , 不需 要进 行 预测 量计 算 , 在开关 频率 不高 的情 况下 可 以 实 现三 相 电压 型 P WM 整流 器 良好 的稳 态 和动 态性 能 。 此外 , 采用 了差值 S VP WM 算 法 , 该 方法 简化 了传统 S VP WM 算 法 , 在 每个 控 制周 期 内计 算三 相 电压 差值 得到 基本 空 间矢量 的作 用 时间 , 避免 了坐 标 变换 、 三 角
摘要 : 建立 了三相电压型 P WM 整流器的数学模型 , 控 制 系统 采 用
坐 标 系下 的 比例 谐 振 双 闭环 控 制 策 略 , 实 现 了 交 流 电流
信号无静差跟踪指令值 。 采用 差值 S VP WM 算法在每个控制周期 内计算三相 电压差值得到基本空间矢量的作用时间 , 避免 了
2 比例 谐 振 双 闭环 控 制策 略
=相 电 压 犁 PW M 罄 流 器 丰 电 路 拓 扑 结 构 及 比例 谐 振 双 闭 环 控 制 系 统 框 图 如 图 2所 示 。
三 相 电压 型 P W M
电流 内环 组成 。电压外环 通 过 P I 调节 产 出指令 电流 , 将 两 相 同步旋转 坐标 系 中的指
式 中, 。 , , S 分 别 为三相 桥臂 的开 关 函数 。 当开关 函数值 均为 1时 , 对应 桥臂 的上 桥臂 开关管 导通 , 下桥 臂 开关 管关 断 ; 当开关 函数 值 均为 0时 , 对应 桥臂 的下 桥臂 开关 管导通 , 上 桥臂 开关 管关断 。 式( 1 ) 是 建 立在 三相 静 止 坐标 系 中的高 频 数学 模 型 , 通 过变换 矩 阵式 ( 2 ) 可 以将 三 相静 止 坐标 系变 换 到
非完美算法初探——任一恒
非完美算法的应用——河北唐山一中任一恒在平时的练习和考试中,我们都是尽量设计出完全正确的算法来解决问题。
可是,实际中很多问题都是不能完美解决的,还有很多问题完美解决所需要的时间&空间是根本无法接受的,所以,非完美的算法在实际中有着很广的应用。
随着竞赛的题目越来越接近时际,以按优劣计分的题目为代表的考察非完美算法的题目越来越多,本文将讨论一些常用的非完美算法,希望给读者一些启发。
1、贪心算法贪心算法的基本思路是从问题的某一个初始解出发逐步逼近给定的目标,以尽可能快的地求得更好的解。
当达到某算法中的某一步不能再继续前进时,算法停止。
这样我们就得到了一个解,但是我们无法保证解是最优的。
下面我们来看看贪心算法的表现。
例题1 NOI2007 追捕盗贼某国家要追捕一个大盗,该国家的城市网络是一棵树,现在要你通过在某城市空降警察,让警察从某城市移动到有道路连接的城市,收回某警察来达到捕捉到盗贼的目的。
用到的警察越少越好。
这道题的标准算法用到了很多高等知识,而且实现也是相当复杂的,在限定的时间内完美的解决这道题可以说是不能完成的任务,那么我们贪心算法在这道题上的表现如何呢?我们不妨将原树想象为一棵有根的树,先在根结点空降一个警察,然后再次在根结点空降一个警察,让这个警察走向某棵子树,对这棵子树重复上面的过程,这样一棵子树一棵子树的排除,直到整棵树被排除。
这里可以采取一个十分有效的优化就是在只剩一棵子树的时候,不用再安排新的警察,直接让一直守在根结点的那个警察走过去即可。
所以不妨安排需要警察最多的那颗子树最后走,这样可以使结果得到很大优化。
由于结点数不超过1000,所以我们可以枚举每个结点为根结点,找出其中需要警察最少的那个。
这个算法虽然存在着反例,但是由于那个十分有用的优化,可以使结果十分接近标准结果。
通过数据试验的结果,有90%的结果和标准算法产生的结果一致,10%不一致的相差也是十分的小。
可以说贪心算法在这道题目上发挥的很好。
一种基于二分法和属性加权平均重要度的约简算法
量化决策属性对各个条件属性 的依赖程度的变化 , 重点计算包含在正域或相对正域中的元素 , 却忽视 了负域 和边界域 中的元素和孤立点 , 所以这个算法显得精细度不够。基 于信息熵的约简算法 以信息论为基础 , 结合 互信息和条件熵的特点 , 对边界域中的元素进行了较细致的描述 , 却忽视 了正域或相对中的元素 , 这个算法显 得过于精细。以上两种属性约简算法在单独使用时的效果都不是很理想。把两种算法结合起来 , 取长补短 、 优 势互补 的方 法更 为合 理 , 这 种方 法就 是结合 两种 算法 定义属 性 的加权 平均 重要度 。 加权 , 指 的是 在进行 平均 数计算 时 , 根据 各个 变量 的重要 程 度 , 给 出具 有权 衡 轻 重作 用 的数 值 , 权 值 一般
定 义 1 给定决 策 表 K=( U , C U D , V , f ) , v, a∈C , 定 义
S I G ( . I 3 1 , C D ) : = r( c ( D h ) 。 r c ( } ( D ) : = — — }
1 . 2 基 于信 息熵 的属 性 重要度
.
( 1 )
为 条件 属性 B对条 件属 性集 c相对 于决 策属 性 D 的重 要度 。
定义2 基于信 息熵的 属性重 要度: 给 定决策表K : r ( D ) . ( D ) : 坚 竺
性 1 3 ∈C—B, 当把 B加 入 到属 性集 B后 互 信息 的增 量
,长春 师范 学 院学Fra bibliotek ( 自然 科 学 版 )
J o u r n a l o f C h a n g c h u n N o r m a l U n i v e r s i t y ( N a t u r a l S c i e n c e )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
移 动 函数米 计 算偏 移值 。在 同时满 足两 种 启发 式规 则的情 况 下 ,则应 选取 两者 中的较 大者
作 为模 式 串右移 的距 离 。
B 算法分 为两 个阶 段 :预处 理阶段 和 查找 阶段 。 M ( )预处 理阶 段 : 1
P ,长度为 m,其中 n ≥m。模式串与文本串最左对齐,每个文本长度为 m 的段成为窗 口。
B 算法 的基 本思 想是 : M ( )考虑 到 匹配过程 中,很 多情 况 下是 串中前 面 的许 多字符 都 匹配 ,而 最 后 的几个字 1 符 不匹 配 。因此 ,采 用传统 的 从左到 右方 式进 行扫 描就 会增 加不 必 要 的时 间消耗 。所 以, 我们 可 以采 用从 右到 左 的方 式对 模式 串和文 本 串进 行扫 描 。这 样 ,一 旦发现 文 本 串中 出现
后 取两者 中的大者 。 预 处理 阶段 的任 务是计 算 B dhr Gcdu i 个偏 移量 函数 。 aca 计算 每个 字 aca 和 osfx两 B dhr
符所对应的偏移量,如果某个字符在模 式串 P中出现多次,则以最右边的那次出现来确定 偏 移量 。G o sfx 函数 则 是用 来计 算模式 串中 的某个 后缀 匹配成 功 时文 本 串指针 右移 的 o du l
B 算法 首先对 模式 串 P进 行预 处理 ,计算两 个偏 移 函数 :Baca( 对某 个字 符) M dhr 针 和
收 稿 日期 :2 1—-0 0 151 作者简介 :马永 强 ( 9 2年生),男,汉族 ,内蒙商都 人,讲师 ,研 究方 向:多媒体技 术及 网络 安全 。 18
第 4期
关键词:模 式匹配:S o t M:w n r ;B M 中图分类号 : t 3 2 文献识别码 : B 文章编号 :1 0 — 1 1(O 1 4 0 4- 5 p 1 0 9 7 7 2 l )0 - 0 8 0
S ot 基于特 征检 测 的网络入 侵检 测系 统 ,它 的检测 方式 是进 行模 式 匹配 。因此 ,模 nr是 式 匹配算 法 的好坏 直接 决定 了检测 引擎 的性 能 。 S ot实现 的模式 匹配 算法主 要有 :B yr oe简 称 B 算 法) nr oe- r( Mo M 、Ah. oaik简称 oC rs ( c A 算法) C 、wuMabr 称 wM 算法 ) . ne( 简 以及 S KSac 法 。而本 文主 要是 对 B 和 WM F erh算 M 算法 进行 了一 些分 析 、比较 。 1 o e- oe 法 、B y r Mo r 算 B 算法 是 B yr Mor 在 17 M oe和 oe 9 7年提 出来 的 ,该算法 在 匹配过 程 中 ,模式 串从 左 向 右 移动 ,但字 符 比较 则应 按照 从右 向左 的次序 进行 。假 设文本 串为 T,长 度 为 n ,模式 串为
马永强 :B M算法与 w M算法的 比较
4 9
G o sfx针对 某个 子 串) o duf ( i ,然后将 模 式 串和文 本 串对齐 ,从 右往 左进 行 匹配 ,当文 本 串中
的 字符 与模 式 串字 符 不匹配 时 ,我们根 据 函 数 B l a 和 Go du i  ̄c r h o sf x计算 出的偏移 值 ,然
摘 要:模 式匹配算 法比较成熟 ,但是传统的模 式 匹配算法对提 高 Sot 测性 能的效果不是 nr检 十分有 效. nr 采用的 B 算法是一种单模式 匹配算法,目前研 究者对 Sot 式 匹配算法的 So t M nr 模 研 究和改进 主要是 采用多模式 匹配算法来替抉原有的 B M算法.本文主要 介绍 了 B M算法和 w M 算法,分析 了这 两种 算法的基本原理并进行 了一些相关的比较 .
在模 式 串 中的最右 出现 对齐 。
( )好 后缀 移动 。该 移动 函数 G osfx是 针对模 式 中某个 子 串 的。 当匹配 失败 时 , 3 o du i
如果已匹配子串长度不为 0 ,就可 以采用好后缀启发式规则,即移动模式 串使得已匹配部
分 与该 部分 在模 式 串中的 最右 端 出现 对齐 。
第 3 第 4期 3卷 21年 l 01 2月
集
宁
师
专
学
报
V 1 3,No 4 b. 3 . De .0l c2 l
J u a f iig e c esColg o r l Jnn T a h r l e n o e
B 算法与删 算法 的 比较 M
马 永强
( 集宁师范学 院 计算机 系,内蒙古 乌兰察布 0 2 0) 100
偏 移量 ,它 是 由两 个 因素决 定 的: a 后缀在 模 式 串中除 去 自身 外 ,从最 右端 开始 荐 次 出现 的位 置 。 . 该
b . 在第一个条件不成立的情况下,该后缀的某个后缀 同时又是模式的前缀。
综合 考虑 ,设 i 是文 本 串与模 式 串某 次 不匹配 时字符在 模 式 中的位 置(<≤m一 ) 次 Oi 1。每 计算 偏移 量 时取 B dhr ]m++ 和 G o sfxi aca[ 一 ti e odt i[的最 大值 是很 有道 理 的 , r ] 因为 由上 面两 个 函数 的讨 论知 道小 于这 个偏 移量 的文本 移 动是 不可 能 出现模 式 匹配 的 。
模式串中没有的字符时,就可以将模式串大幅度的 “ 滑过 ”一段距离,实现快速匹配。 ( )坏字 符移 动 。B 算法 首先 对模 式 串进行 预处理 ,会 得到 一些 启发 式信 息 ,并使 2 M
用 这些 信息 来计 算模 式 串 P 向右 移动 的距 离 ,该移动 函数 B dhr是针对 模式 串中的某 个 aca 位 置 的。坏 字符 启发 式规 则是 当发 生失 配 时 ,移 动模 式 串 ,使 得 失配 的文本 字符 与该 字 符