基于SPCE061A的步进电动机控制系统设计
基于SPCE061A的倾角测量电动车的设计
摘要: 以凌 阳 1 6位 单 片 机 S C 0 1 作 为 主 P E 6A 控 单元 , 型直流 减速 电机作 为驱动 元件 , 过增 量 小 通 式 旋转 编码 器测速 , 成 带速 度 反 馈 的伺 服控 制 系 构
统 。 利 用 加 速 度 传 感 器 测 量 倾 角 的 原 理 , 计 智 能 设
文献标 识码 : Bቤተ መጻሕፍቲ ባይዱ
资源 L , 1 进行 语 音播 报 , ] 实现 了速 度 、 时间 、 面倾 角 路
和路 程信 息 的实时 显示 和语 音播 报 。
文章编 号 :0 1 2 7 2 0 ) 5—0 5 一O 1 0 —2 5 ( O 8 O 09 2
Ab t a t T hi s t m us s m ir on r le sr c : s ys e e c oc t o l r
ph o l c rc e o t r a ie a t — s a c i ot e e ti s ns r o e lz u o — e r h ng
内部有 2路 H 桥 , 别 由 2路 P 分 WM 信 号控 制 ,通
过P WM 实 现对 电机 的调 速 , 完成 电动 车的前 进 、 后 退 和停 止 。集成 电路 包 含 内部 逻 辑 控 制 , 电荷 泵栅 极 驱动 。MC 3 8 3 8 6的导 通 电阻 为 1 0mQ, 2 脉宽 调 制 信号 ( W M) P 的频率 小 于 1 Hz 具有 短 路保 护 、 0k , 欠 压保 护 和过温 保 护 等 , 3 8 6的 工作 电压 为 5 MC 3 8
( . olg fAuo t n En ie rn Qig a iest Qig a 6 0 1, ia 2 S a d n rie , 1 C l eo t mai gn eig, n d o Unv r i e o y, n d o 2 6 7 Chn ; . h n o g Ail s n Qig a 6 1 8, ia n d o 2 6 0 Chn )
基于单片机的步进电机控制的设计
基于单片机的步进电机控制的设计本文主要介绍了基于单片机的步进电机控制的设计,包括步进电机控制的基本原理、单片机控制步进电机的具体实现方法、实验结果以及未来展望等方面。
一、步进电机控制的基本原理步进电机是一种控制精度高、响应速度快、运动平稳、噪音低的电机,广泛应用于数控机床、自动化设备、印刷机、纺织机等领域。
步进电机的控制原理是通过向电机提供不同的脉冲序列控制电机转动的步距角度,实现电机旋转、逆旋转、定位等操作。
其中,步距角度是指电机每次接收到一组脉冲信号后转动的角度,它与电机的结构参数、电气参数等有关。
单片机控制步进电机可以采用两种方式,一种是直接控制步进电机,另一种是通过驱动芯片来控制步进电机。
下面介绍两种实现方法的具体步骤。
(一)直接控制步进电机步骤一:确定步进电机的电气参数,并根据电气参数确定所需的驱动电压和电流。
步骤二:连接步进电机到单片机的相应IO口,控制步进电机正、反转和步距角度。
步骤三:编写控制程序,实现步进电机的控制。
步进电机的控制程序主要包括以下几个方面:1.设定步进电机工作方式(正转、反转、定位等)。
2.设定步进电机步距角度,根据步距角度确定脉冲信号频率。
3.输出控制信号,使步进电机按设定的方式转动。
步骤二:设计电路板,将驱动芯片和步进电机连接起来。
步骤三:编写控制程序,通过单片机向驱动芯片发出脉冲信号,控制步进电机的转动。
具体控制程序的编写与直接控制步进电机的实现方法类似,主要是控制脉冲信号的频率和方向。
三、实验结果我们在实验室里搭建了一个步进电机控制系统,采用的是第二种实现方法,即通过驱动芯片来控制步进电机。
实验结果表明,该控制系统具有良好的控制精度和响应速度,可以实现步进电机的高速旋转、逆转和定位等操作。
四、未来展望随着工业自动化的不断推进和新一代技术的不断涌现,步进电机控制技术将会变得越来越重要。
未来,我们将进一步深入研究步进电机控制技术,探索新的控制方法和应用场景,为工业自动化领域的发展做出更大的贡献。
基于SPCE061A单片机的温室温湿度控制系统的设计
』 I / 1 l1 I帕O 0 AI D a  ̄3 R BI 4 B 2 A 5 S
功 能 , 现 温 度 的查 询 。采 用 液 晶 显 示 模 块 10 实 6 2对
l2 6 藏量 O
瀑 { l _ I 1B ● 璐 1 R 度 10 - 1 I4 传O2 _ 0 B - 13 _ 5 毒 曩 _ _ ● _ 一
维普资讯
2 0 . 7月 0 8年
农 机 化 研 究
第 7期
基 于 S CE 1 单 片 机 的 温 室 温 湿 度 控 制 系 统 的 设 计 P 6 0 A
高 立 艾 ,李 丽华 ,刘 伟娜 ,周 永 杰
( 河北 农 业 大学 机 电工 程 学 院 ,河 北 保定
关键词 :温室控制 系统 ;P E 6 A; S C 0 1 温湿度 ;组态 软件
中图分类号 :T 2 3 5 P 7 .
文献标识码 :A
文章编号 :1 0 0 3—1 8 2 0 ) 7— 1 9—0 8 X(0 8 0 0 1 3
O 引言
、
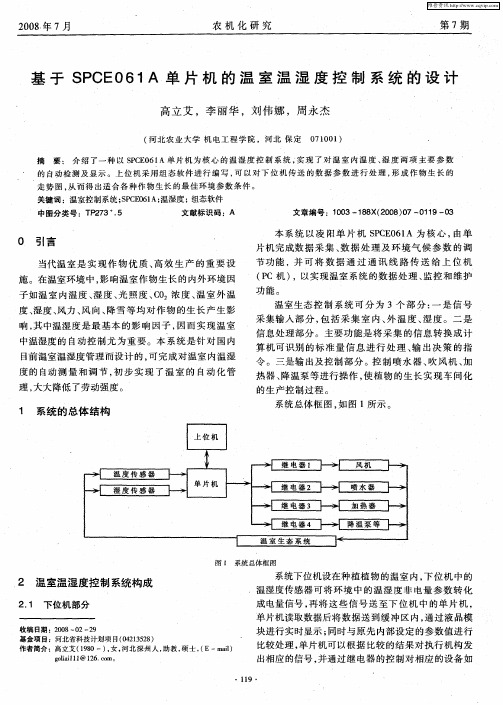
本 系 统 以 凌 阳单 片 机 S C 0 1 为 核 心 , P E 6A 由单 片 机 完 成 数 据 采 集 、 据 处 理 及 环 境 气 候 参 数 的调 数
信息处理部分 。主要功能是将采 集 的信息 转换成 计 算 机可识别 的标准 量信 息进 行处 理 、 出决策 的指 输 令 。三是输 出及控制部 分。控 制喷水 器、 吹风 机 、 加
热器、 降温 泵 等 进 行 操 作 , 植 物 的生 长 实 现 车 间 化 使
的生 产控 制 过 程 。
基于SPCE061A的水温监控系统设计

成 了 A C、A A C放 大 电 路 等 ,是 一 颗 功 能 强 大 的 S C D D C、 G O
芯 片 。 芯 片拥 有 8 1 该 路 0位精 度 的 A C, 中一 路 为 音 频 转 D 其 换通道 , 另外 7路 可 作 为 普 通 的 A D转 换 通 道 。 可 以 实 现 简 它
Ab t a t sr c :A tr e e a u emo i r y t m e in d, ih i b s do P E0 wae mp r t r n t se i d sg e whc a e n S C 61 s mp e t r e e au eb s g t os s s A, a l s wae mp r t r yu i t n P O e s r e i n t n ef r n e va d gtl l rtc n lg n r c se h mp r t r aa va p 0 0 t n hn e r l TI 0 s n o , l mia e it r e c i i i t h oo y a d p o e s st e t e af e e i e e a u ed t i r p r o a tg a— i
d r aiec nrl rPD c nrl r. h et grs l n iaeta esse h se c l n blyi mp rtr o to. ei t o t l ( I o t l )T ets n eut idc t th ytm a x el t it t eau ec nr1 v v oe oe i s h t e a i ne
第l 9卷 第 5期
Vo. 9 11 Nto i sg n i e rn l cr nc De i n E gn e i g
基于单片机的步进电机控制系统的设计

基于单片机的步进电机控制系统的设计
步进电机是一种特殊的电机,它的转动是以步进的形式进行的,每一次步进角度由控制电路发出的一个脉冲决定。
因此,基于单片
机的步进电机控制系统需要实现以下功能:
1. 产生脉冲信号:单片机需要通过定时器等模块产生相应的脉
冲信号,以控制步进电机的运动。
2. 识别旋转方向:步进电机需要能够前进和后退,因此单片机
需要实时检测步进电机的转动方向,并控制脉冲信号发生的顺序。
3. 控制转速:控制步进电机转速需要通过控制脉冲信号的频率
来实现,单片机需要动态地调整脉冲信号的频率,从而控制欲速度。
下面是实现步进电机控制的一种基本算法:
1. 设置电机控制端口,初始化各参数。
2. 等待步进电机稳定。
在控制电路上电时,如果步进电机没有
停在起始位置,需要先手动将步进电机转动到起始位置,然后等待
电机稳定。
3. 根据旋转方向和转速控制脉冲信号产生频率。
根据步进电机
的旋转方向,确定脉冲信号产生的顺序,然后通过定时器等模块产
生相应的脉冲信号,从而控制步进电机旋转。
4. 根据指令调整转速。
根据实际需求调整步进电机的转速,即
调整脉冲信号频率。
上述算法是一个最基本的控制算法,具体的实现还需要考虑步
进电机控制的精度、错误处理等方面的问题。
直流电机控制系统的设计
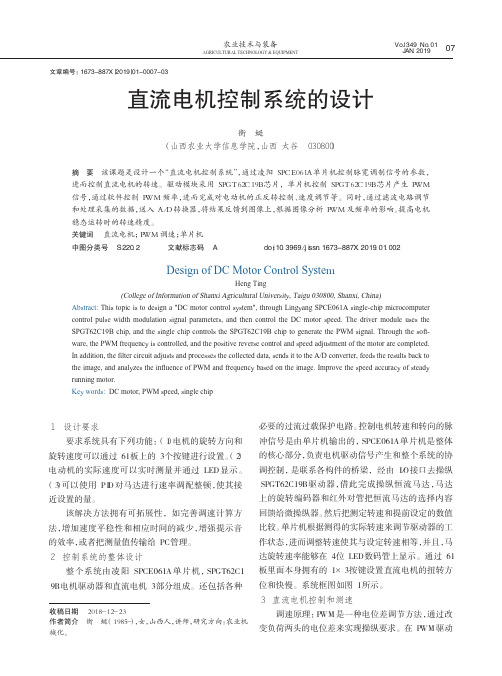
整个系统由凌阳 SPCE061A 单片机,SPGT62C1 9B 电机驱动器和直流电机 3 部分组成。还包括各种
收稿日期 2018-12-23 作者简介 衡 蜓(1985-),女,山西人,讲师,研究方向:农业机 械化。
必要的过流过载保护电路。控制电机转速和转向的脉 冲信号是由单片机输出的,SPCE061A 单片机是整体 的核心部分,负责电机驱动信号产生和整个系统的协 调控制, 是联系各构件的桥梁,经由 I/O 接口去操纵 SPGT62C19B 驱动器,借此完成操纵恒流马达,马达 上的旋转编码器和红外对管把恒流马达的选择内容 回馈给微操纵器。然后把测定转速和提前设定的数值 比较。单片机根据测得的实际转速来调节驱动器的工 作状态,进而调整转速使其与设定转速相等,并且,马 达旋转速率能够在 4 位 LED 数码管上显示。通过 61 板里面本身拥有的 1×3 按键设置直流电机的扭转方 位和快慢。系统框图如图 1 所示。 3 直流电机控制和测速
1 设计要求 要求系统具有下列功能:(1)电机的旋转方向和
旋转速度可以通过 61 板上的 3 个按键进行设置。(2) 电动机的实际速度可以实时测量并通过 LED 显示。 (3)可以使用 PID 对马达进行速率调配整顿,使其接 近设置的量。
该解决方法拥有可拓展性,如完善调速计算方 法,增加速度平稳性和相应时间的减少,增强提示音 的效率,或者把测量值传输给 PC 管理。 2 控制系统的整体设计
毕业设计论文基于单片机的步进电机控制器的设计
毕业设计论文基于单片机的步进电机控制器的设计摘要:本论文针对步进电机控制系统的需求,提出了一种基于单片机的步进电机控制器的设计方案。
该方案在硬件设计上选用了适用于步进电机驱动的控制芯片,并通过电路连接实现电机控制信号的输出。
在软件设计上,通过单片机编程实现步进电机的运动控制,包括步进角度、转速以及方向等参数的调节和控制。
通过测试实验证明,该设计方案能够有效地实现步进电机的精确控制,具有较好的稳定性和可靠性。
关键词:单片机;步进电机;控制器;硬件设计;软件设计;运动控制第一章引言1.1研究背景目前,步进电机作为一种常用的电机类型,在自动控制领域和精密仪器中得到了广泛应用。
步进电机具有结构简单、运行平稳、精度高等优点,因此在许多行业中被广泛采用。
为了实现步进电机的精确控制,需要一种高效、稳定的步进电机控制器。
1.2研究目的本论文的主要目的是设计一种基于单片机的步进电机控制器,通过硬件和软件的完美结合,实现对步进电机的精确控制。
同时,通过测试和分析,验证该控制器的有效性和可靠性。
第二章方案设计2.1硬件设计在硬件设计方面,本文选用了适用于步进电机驱动的控制芯片,并通过电路连接实现电机控制信号的输出。
通过调节电源、电阻和电容等元件,实现对步进电机驱动电压和电流的调节,以满足步进电机运行的需求。
2.2软件设计在软件设计方面,本文采用单片机进行编程,实现对步进电机的运动控制。
通过编写程序,实现对步进角度、转速以及方向等参数的调节和控制。
通过采集和处理步进电机的反馈信号,实现闭环控制,提高步进电机的运动精度和稳定性。
第三章实验与结果通过搭建实验系统,并进行测试和分析,验证了本文设计的基于单片机的步进电机控制器的有效性和可靠性。
实验结果表明,该控制器能够实现步进电机的精确控制,具有较好的稳定性和可靠性。
第四章论文总结本论文设计了一种基于单片机的步进电机控制器,并通过实验验证了该控制器的有效性和可靠性。
该控制器在硬件设计上选用适用于步进电机的控制芯片,并通过电路连接实现电机控制信号的输出。
基于SPCE061A数字语音温光测控系统的设计
中图分 类号 :T 3 M9 2
文献标 识码 :A
文章编 号 :10 — 6 3 (0 8 3 17 0 0 2 6 7 2 0 )0 — 7 — 3
.
0 引言
本 系统 由两 大模 块组 成 :模 拟遥 控 器 发射 模 块 和环 境测 量 模块 。其 中模 拟遥 控 发射 模 块 的参 数 有 :工作 电 压 :3 一 .V;遥 控距 离 :> m ( V 5 5 3 工作 在 45 时 ) . V 。环 境
控 器 ,当遥 控 器 发射 部 分 的 K Y1 KE 、 E 、 Y2 K Y3三个 键 按 下 的 时 E
工作 电压 VD H 为 V D 肋~
55 (/ 。 C U 时 钟 : .V I O) P
作 为 主控制 器 ,传感 器模 组 的 红外 发 射管 发 射 电路 作 为
发 射 装 置 ,通 过 S C 0 1 精 简 开 发 板 ( 称 6 P E 6A 简 1板 ) 上 的按 键 控制 发射 。 图 2 为 环 境 测 量 模 块 的 系 统 框 图 , 同 样 采 用
传 感 器模 组 可 以测 量温 度 和光 线 状 况 ;可 以接 收来 自遥控 器 的信 号 ,也可 以模 拟简 易遥 控器 。
究生 。 主要 从 事 电i 术及 控 制 方 面 的研 究 。 - f技
维普资讯
第2 1卷 第 3期 20 0 8年 5月
De eo me t I n v t n o a hn r v lp n & n o ai f c ie y& El t c lP o u t o M e r a r d cs c i
基于单片机的步进电机控制系统设计--毕业设计
基于单片机的步进电机控制系统设计摘要:步进电动机由于用其组成的开环系统既简单、廉价,又非常可行,因此在打印机等办公自动化设备以及各种控制装置等众多领域有着极其广泛的应用。
本文介绍的是一种基于单片机的步进电机的系统设计,用汇编语言编写出电机的正转、反转、加速、减速、停止程序,通过单片机、电机的驱动芯片ULN2004以及相应的按键实现以上功能,并且步进电机的工作状态要用相应的发光二极管显示出来。
本文内容介绍了步进电机以及单片机原理、该系统的硬件电路、程序组成,同时对软、硬件进行了调试,同时介绍了调试过程中出现的问题以及解决问题的方法。
该设计具有思路明确、可靠性高、稳定性强等特点,通过调试实现了上述功能。
关键词:步进电机;脉宽调制;驱动机构;单片机;转动Design of The Control System of Step-motor Abstract:The open-loop system which is composed by step-motor is simple, cheap and very practical, so there are very wide range of applications in printers and other office automation equipment and various control devices, and many other fields.This article describes one design of step-motor system based on program of the preparation of a motor , reverse, speed up, slow down, stop is written by compile language. The above functions are realized through the microcontroller, motor driver chip ULN2004 and correspond key , and the work state of stepper motor is diaplayed through the light-emitting diode. This article introduces the principle of stepper motor and single-chip microcomputer, the system hardware circuit, the program components, while software and hardware for the debugging, at the same time introduces the problems which are appeared in the debugging process and the solutions of the problems . The design has the advantages of clear , high reliability, strong stability, etc.,and the above-mentioned functions are realized through the debugging..Key Words:Stepper motor; Pulse-width modulated; driving mechanism; singlechip; rotation目录序言 (1)第1章绪论 (2)课题研究的目的和意义 (2)国内外研究概况 (2)论文的主要研究内容 (3)第 2 章步进电机与单片机简介 (4)步进电机介绍 (4)步进电机概述 (4)步进电机的工作原理 (6)步进电机的分类与选择 (8)步进电机驱动系统介绍 (9)步进电机驱动系统简介 (9)步进电机绕组的电气特性 (10)单片机原理 (11)单片机原理概述 (11)单片机的应用系统 (12)AT89C51简介 (13)第 3 章系统整体硬件结构 (17)系统整图 (17)电源部分 (18)按键部分 (18)驱动部分 (19)状态指示部分 (20)时钟部分 (20)第 4 章系统软件设计 (21)系统开发软硬件环境 (21)系统主程序 (21)查键部分 (22)前进部分 (22)后退部分 (23)加速部分 (24)减速部分 (25)第 5 章系统的调试与检测 (26)程序编译时的错误与解决方法 (26)LM7812输出电压错误与解决方法 (26)步进电机转动错误及解决方法 (26)结论与展望 (27)参考文献 (28)致谢 (29)附录 (29)附录1:源程序清单 (30)附录2:英文资料及其中文翻译 (35)基于单片机的步进电机控制系统设计序言步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。
基于单片机的步进电机控制系统设计与实现
基于单片机的步进电机控制系统设计与实现1. 本文概述随着现代工业自动化水平的不断提高,步进电机因其高精度、易控制等特点,在各个领域得到了广泛应用。
本文旨在设计并实现一种基于单片机的步进电机控制系统,以实现步进电机的精确控制和高效运行。
本文首先对步进电机的原理和工作特性进行了详细分析,然后选择了合适的单片机作为控制核心,并设计了系统的硬件和软件部分。
在硬件设计方面,本文详细介绍了电源模块、驱动模块、信号处理模块等关键部分的设计与实现在软件设计方面,本文阐述了系统控制算法的设计和程序流程的实现。
通过实验验证了系统的稳定性和可靠性,并对实验结果进行了详细分析。
本文的研究成果对于提高步进电机控制系统的性能,促进工业自动化技术的发展具有重要的理论和实际意义。
2. 步进电机原理及特性步进电机是一种电动机,它将电脑指令转换为机械运动,每接收到一个脉冲信号就转动一个步距角。
这种电机的主要特点是其“步进”功能,即它可以在没有反馈系统的情况下,通过控制脉冲的数量和频率来精确控制旋转的角度和速度。
步进电机的工作原理基于电磁学,它通过施加脉冲电流到电机的线圈上来产生旋转力矩。
电机内部有多个线圈,它们按一定的顺序被激活,产生磁场,这个磁场与永磁体相互作用,从而推动电机的转子转动。
每个线圈的激活对应一个步距角,通过控制线圈的激活顺序和时间,可以实现精确的角度控制。
精确控制:步进电机能够精确地控制旋转的角度和速度,这对于需要精确定位的应用场景非常重要。
无需反馈系统:与伺服电机不同,步进电机不需要外部反馈系统来控制位置,这简化了控制系统的设计。
低速度时的高扭矩:步进电机在低速时能提供较高的扭矩,适合于需要大扭矩但速度不高的场合。
控制简便:步进电机的控制通常只需要简单的数字信号,易于与微控制器或单片机接口。
速度与扭矩的可调性:通过改变脉冲频率和电流大小,可以调整步进电机的转速和扭矩。
失步问题:在高速或高负载的情况下,步进电机可能会出现失步现象,即电机的实际位置与控制信号指示的位置不同步。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
理 ;最后 重点介 绍 了软 件设 计过 程 。通过 实验 ,该 控 制器取 得 了令 人 满意 的效果 。
关键词 :单片机 ;S C 0 1 ;步进 电动机;语音 ;控制系统 P E 6A
t n , a d s e c l y o o k saef rt e mo o u s t t g frt d t n ip a . Had r tu t r i s n p e h p a fw r t t t rs b t u n o a i o a d s ly o o h i i r i l r wa e sr c u e
i to u e n t i p r f au ng wi n u fs e c o n r d c d i h spa e , e t r t i p to p e h c mma d s b tt tn o r d to l e p r — i h n u siu i g f rta i na k y o e a i
张震 宇
( 江科技学院 自动化与 电气工程学 院 ,杭州 3 0 2 ) 浙 10 3
摘 要 :介绍一种新型实用的步进 电动机控制系统 的设计 ,以 S C 0 1 P E 6 A语音单片机为核心 ,其 特色在于以语音命令输入代替传统按键操作 ,以语音播报 电机运行状态代替传 统显示方式;给
ABS TRACT : B s d o c o o t l rS C 0 , a n v l a d p a t a tp moo o t l s se i a e n mi rc n r l P E 61 oe A o e n r ci l se t rc n r y tm s c o
L D和 L D 告知用户 ,如显示 “ ” E C) 1 表示 已走完一 步等。虽然按键和显 示方式 设计简单 ,但 是这种 命令 及 状 态 表 达 方 式 在 先 进 性 、智 能 化 程 度 上 还 是较为欠缺 的。人类 使用最 频繁 、最习惯 的信息
而 电机 的运 行 状 态 一 般 通 过 显 示 方 式 ( 常 用 的 如
话” ,这对丰富工控场合 的控制手段 ,有一定的现
实意 义 。但综 观 现 有 的 步 进 电 动 机 控 制 系 统 ,几 乎很 少有 带 语 音 处 理 功 能 的 。从 技 术 角 度 看 ,在 现有 以单 片 机 为 核 心 的控 制 方 案 中 加 入 额 外 的语
维普资讯
基于 S C 0 1 P E 6 A的步进 M 8 .
文献标 识码 :A
文章编号 :10 -8 8 2 0 )60 6 -4 0 16 4 (0 7 0 -0 10
基 于 SC 01 P E 6 A的步 进 电动机 控 制 系统 设计
De i n o t p M o o n r lS se s d o P sg f S e t r Co t o y t m Ba e n S CE 6 0 1 A
ZHANG e — u Zh n y
( c ol f uo t na dEetcl nier g hj n nvri f Sh o o t i n lc a E g e n ,Z ei gU iesyo A ma o i r n i a t S i c n eh ooy ce eadT cn l ,Hagh u3 0 2 ,C ia n g n zo 10 3 h ) n
音控制 ,并 不是非 常复杂 ,也是完全 可行 的,但 是这样会使原有 的系统 变得庞 大 ,不够 精简。如
果选 用 的单 片机 本 身 内部 就 带 有 语 音 识 别 和处 理
等功能 ,那么实现语音功能就将变得轻而易举 。
本 文 介 绍 的 就 是 这 样 一 种 方 案 ,采 用 凌 阳 (U P U ) 司 出 品 的语 音 单 片 机 一S C 0 1 SN LS公 P E 6 A,
o h y tm d it r l e o r e f S ft e s se a ne na r s u c s o PCE0 A r r s n e re y. Th a i in i l fi p t n 61 a e p e e td b f i l e b sc pr cp e o n u , r c g iai n a d p a fs e c sd s u s d, mo e v rt e s fwa e d sg o e u e i x e s d i e e o n z to n l y o p e h i ic s e ro e h o t r e in pr c d r se prs e n d - ti. Atl s , s ts e o to f c s g i e hr u h e pe me t . al a t a f d c n r lef ti an d t o g x r n s ii e i
KEY ORDS:MC ; S C 0 1 ; S e t r S e c W U P E 6 A tp moo ; p e h; C n r ls se o t y tm o
O 引 言
步进电动机 由于结 构简单 、控制 方便 ,能做 到精确定位 ,成 为工 控上 常 用 的执行 器 件之 一。 目前大 部分 步进 电 动 机控 制 系统 以单 片 机 为 基 础 , 控制者的命令通过按键 输入来表 达 ,如按 某键使 电机正向走 一 步,按某 键 使 电机 反 向走 一步 等 ;