西安科技大学 双闭环直流调速系统的课程设计(MATLAB仿真)
双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证

双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真目录目录 (1)中英文摘要 (2)摘要 (2)Abstract (2)正文 (3)双闭环可逆直流脉宽PWM调速系统设计 (3)设计分析 (3)主电路设计 (8)电流调节器参数计算 (9)信号产生电路 (11)GTR驱动电路原理 (12)辅助回路设计 (13)转速给定电路设计 (13)转速检测设计 (14)MATLAB仿真设计 (15)双闭环调速系统仿真框图 (15)仿真结果 (15)结果分析 (19)总结 (20)参考文献 (21)中英文摘要摘要直流电机由于具有速度控制容易,启、制动性能良好,且在宽范围内平滑调速等特点而在冶金、机械制造、轻工业等工业部门中得到广泛应用。
直流时机转速的控制方法可以分为两类,即励磁控制法与电枢电压控制法。
本文主要研究直流调速系统,它主要由三部分组成,包括控制部分、功率部分、直流电动机。
长期以来,直流电动机因其具有调节转速比较灵活、方法简单等特点,一直在传动领域占有统治地位。
本文对双闭环可逆直流PWM调速系统进行了较深入的研究,从直流调整系统原理出发,逐步建立了闭环直流PWM调整系统的模型。
AbstractWith dc motor speed control is easy, rev, braking performance is good, smooth and in wide range speed adjustment characteristics in metallurgy, machinery manufacturing, light industry, etc. Is widely used in the industrial sector. The rotational speed of dc timing control method can be divided into two categories, namely excitation control method with the armature voltage control method. This paper mainly studies the dc speed regulation system, it mainly consists of three parts, including parts, power control, direct current motor. For a long time, the dc motor because of its adjustment speed is more flexible, simple method and so on, have been occupied dominant position in the field of transmission.In this paper, the double closed-loop irreversible dc PWM speed regulating system, a further study from the principle of dc adjusting system, gradually establish a closed-loop dc PWM adjustment model of the system.正文双闭环可逆直流脉宽PWM调速系统设计设计分析双闭环调整系统的传动系统结构图直流PWM控制系统是直流脉宽调制式调速控制系统的简称,与晶闸管直流调速系统的区别在于用直流PWM变换器取代了晶闸管变流装置,作为系统的功率驱动器,系统构成原理图如下所示:直流PWM传动系统结构图其中属于脉宽调制调速系统主要由调制波发生器GM、脉宽调制器UPM、逻辑延时环节DLD和电力晶体管基极的驱动器GD和脉宽调制(PWM)变换器组成。
双闭环直流调速控制系统MATLAB/Simulink建模与仿真

双闭环直流调速控制系统MATLAB/Simulink建模与仿真文章针对传统PID直流电机调速系统转速超调量过高、调节时间不理想的问题,设计了一种双闭环直流电机调速控制系统。
建立了双闭环直流电机调速系统的数学模型,并对控制器参数进行了整定。
建立了系统Simulink模型并进行仿真,分析了系统在启动过程中的动态特性。
实验结果表明,相较于传统PID 直流电机调速控制系统,本双闭环直流调速控制系统可以消除超调量、有效缩短系统调节时间,具有更好的静态和动态性能。
标签:双闭环;直流调速;Simulink建模;仿真分析随着电机控制技术的不断发展,工业上对于电机的使用频率及动态性能的要求不断提高,直流电机的速度控制问题是常见且重要的工程研究问题之一[1]。
传统PID直流调速控制系统存在超调量过高、调节时间缓慢等问题,导致系统的动态性能不理想,在一些对于工艺要求精准的情况下无法满足系统动态指标的要求。
如何解决控制系统中稳、快、准等各方面性能制约,以达到对于转速、电流控制指标的要求,始终是一个重要的讨论课题[2]。
文章针对上述问题,设计了一种双闭环直流调速控制系统,在传统PID直流调速系统的基础上,引入了电流调节器,以改善系统输出转速的动态性能,相对于传统PID调速系统,本系统有效降低了直流电机输出转速的超调量,明显提高了系统的静态和动态指标,具有更好的系统性能。
1 双闭环直流调速系统结构设计直流电机的速度控制问题是常见且重要的工程研究问题之一,随着工业控制技术的不断发展,工程上对于直流电机调速系统的稳、准、快性能指标有了越来越苛刻的要求[3]。
双闭环控制系统是一种常用的复杂控制系统,是改善过程控制系统品质的一种有效方式,并在实际工程中得到了广泛应用[4]。
文章所设计双闭环调速系统结构如图1所示,从闭环结构上看,双闭环控制系统由两个负反馈闭环结构组成,电流调节器在里面(电流环);转速调节器在外边,(速度环)。
为了实现转速和电流两种负反馈分别作用,在系统中设置了两个调节器,电流调节器ACR(Current Regulator)和转速调节器ASR(Speed Regulator),两者之间实行串级连接,其中转速调节器ASR的输出作为电流调节器ACR的输入,再用电流调节器ACR的输出去控制晶闸管装置。
基于MATLAB的双闭环直流调速系统方案设计书
基于MATLAB的双闭环直流调速系统设计目录1、绪论 (3)2、设计方案论证 (4)3、系统仿真 (8)4、心的体会 (9)5、参考文献 (9)1.绪论对于一般的调速系统来说,采用PI 调节器的单闭环直流调速系统(单闭环系统)可一以在保证系统稳定的前提下实现转速无净差。
但是如果对系统的动态性能要求较高,例如要要求快速起动、制动,突加负载动态速降小等等。
此时仅凭单闭环系统已经很难满足要求。
这主要是因为单闭环系统不能随心所欲地控制电流和转矩的动态过程。
为了能很好地解决这个问题,我们引入了转速、电流双闭环直流调速系统组成的双闭环直流调速系统。
在系统中分别设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈。
两者之间实行嵌套(或者称为串级)联接。
如图1所示把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE 。
从闭环 结构上看,电流环在里面,称为内环;转速环在外边,称为外环。
这样就形成了转速、电 流双闭环调速系统。
双闭环直流调速系统的原理图如图1。
图1 转速、电流双闭环直流调速系统TGnASRACRU *n + -U nU iU*i+-U cTAVM+-U dI dUPL-MT2.设计方案论证 2.1.设计要求直流电动机的技术参数如下:220V 、136A 、1460r/min 、e C =0.312min V r ∙、 允许过载倍数λ=1.5,晶闸管装置的放大倍数SK =40,失控时间s T =0.0017s,电枢回路总电路R=0.5Ω,时间常数L T =0.03s, m T =0.18s,电流反馈系数β=0.05V/A ,转速反馈系数α=0.007min V r ∙。
设计要求:稳态指标无净差,动态指标,i σ%不大于5%,n σ%不大于10%2.2.具体设计方法系统无净差则ss e =0,因此选用I 型系统,采用双闭环直流调速系统,先设计电流环,再设计转速环。
双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证

双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证双闭环可逆直流脉宽调制(PWM)调速系统是一种常见的电机调速控制方案。
该系统通过两个闭环来实现电机的速度控制和电流控制,从而实现精准的调速效果。
本文将介绍双闭环可逆直流脉宽PWM调速系统的设计原理,并使用MATLAB进行仿真验证。
设计原理:该系统由以下几个主要部分组成:1.输入信号:输入信号一般是一个速度设定值,表示期望电机的转速。
该信号可以通过人机界面或其他控制系统输入。
2.速度控制环:速度控制环根据输入信号和反馈信号之间的差异来控制电机的转速。
常见的速度控制算法有比例控制、积分控制和微分控制。
3.脉宽调制器:脉宽调制器根据速度控制环输出的控制信号来生成PWM信号,控制电机的转速。
通常使用的脉宽调制算法有定时器计数法和比较器法。
4.电流控制环:电流控制环根据PWM信号和反馈信号之间的差异来控制电机的电流。
常见的电流控制算法有比例控制、积分控制和微分控制。
5.电机驱动器:电机驱动器将电流控制环输出的控制信号转换为电机驱动信号,驱动电机正常运转。
MATLAB仿真验证:为了验证双闭环可逆直流脉宽PWM调速系统的性能,可以使用MATLAB进行仿真。
以下是一种基本的MATLAB仿真流程:1.定义电机模型:根据电机的参数和特性,定义一个数学模型来表示电机的动态响应,例如通过电机的转矩-转速曲线或电机的方程。
2.设计速度控制器:根据系统要求和电机模型,设计一个适当的速度控制器。
可以使用PID控制器或其他控制算法。
3.设计PWM调制器:根据速度控制器输出的控制信号,设计一个PWM调制器来生成PWM信号。
根据电机模型和控制要求,选择合适的PWM调制算法。
4.设计电流控制器:根据PWM信号和电机模型,设计一个电流控制器。
可以使用PID控制器或其他控制算法。
5. 仿真验证:将以上设计参数输入到MATLAB仿真模型中,并进行仿真验证。
可以使用Simulink工具箱来搭建仿真模型,并通过逐步增加负载或改变速度设定值等方式来验证系统的性能。
双闭环调速系统调剂器设计及matlab仿真验证
双闭环调速系统调剂器设计及MATLAB仿真验证1.设计任务及要求分析由设计任务可知,本次课程设计要求采纳双闭环调速系统,对不可逆生产设σ≤,空载启动到额定转速时备进行操纵,以实现稳态无静差,电流超调量5%iσ≤的指标要求。
另外,别离在电流调剂器有限幅和无穷幅的转速的超调量10%n情形下,对直流调速系统稳态运行时转速环突然断线时系统指定环节的工作情形进行仿真。
为了实现稳态无静差,能够将电流调剂器和转速调剂器设计成PI调机械结构,为了知足电流超调量和转速超调量的指标,在对电流调机械和转数调机械选取参数时,能够选取典型的参数值,系统具体参数见说明书后面的参数计算部份。
要实现稳态运行时转速环突然断线时系统的工作情形仿真,能够将转速信号与阶跃信号通过乘法器作为速度环节的反馈信号。
阶跃信号在指定的时刻从初始值1跳变到终值0。
通过上述的简要介绍,即能够看出系统设计的整个思路。
以下个环节将做具体介绍和方案的实现。
2.双闭环系统的组成及模型2.1双闭环系统的组成关于常常正、反转运行的调速系统,缩短起、制动进程的时刻是提高生产率的重要因素。
在起动(或制动)过渡进程中,希望始终维持电流(电磁转矩)为许诺的最大值,使调速系统以最大的加(减)速度运行。
当抵达稳态转速时,最好使电流当即降下来,使电磁转矩与负载转矩相平稳,从而迅速转入稳态运行。
在最大电流(转矩)受限制时调速系统所能取得的最快的起动(制动)进程如图1所示。
图1时刻最优的理想过渡进程I的为了实现许诺条件下的最快启动,关键是要取得一段电流维持最大值dm恒流进程。
因此,采纳电流负反馈来实现这一目的。
为了使转速和电流两种负反馈别离起作用能够再系统中设置两个调剂器,把转速调剂器的输出当做电流调剂器的输入,再用电流调剂器的输出去操纵电力电子变换器UPE。
系统整体的原理图如图2所示。
图2双闭环直流调速系统原理图2.2双闭环系统的稳态结构图双闭环直流调速系统的稳态结构图如图3所示。
基于Matlab的双闭环直流调速系统设计及仿真1
基于Matlab的双闭环直流调速系统设计及仿真宋友志摘要:本文介绍了基于工程设计方法对直流调速系统的设计,根据直流调速双闭环控制系统的工作原理,详细分析了系统的起动过程及参数设计,运用Simulink 进行直流电动机双闭环调速系统的数学建模和系统仿真。
最后显示控制系统模型以及仿真结果并加以分析。
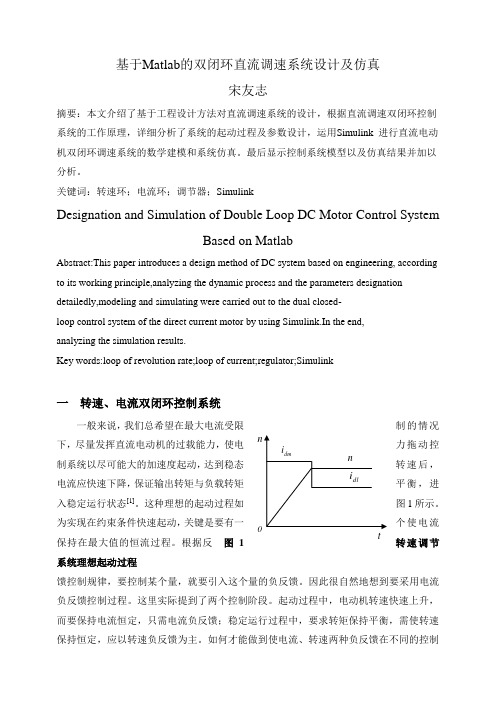
关键词:转速环;电流环;调节器;SimulinkDesignation and Simulation of Double Loop DC Motor Control SystemBased on MatlabAbstract:This paper introduces a design method of DC system based on engineering, according to its working principle,analyzing the dynamic process and the parameters designation detailedly,modeling and simulating were carried out to the dual closed-loop control system of the direct current motor by using Simulink.In the end,analyzing the simulation results.Key words:loop of revolution rate;loop of current;regulator;Simulink一转速、电流双闭环控制系统一般来说,我们总希望在最大电流受限制的情况制系统以尽可能大的加速度起动,达到稳态转速后,电流应快速下降,保证输出转矩与负载转矩平衡,进入稳定运行状态[1]。
这种理想的起动过程如图1所示。
为实现在约束条件快速起动,关键是要有一个使电流保持在最大值的恒流过程。
课设-双闭环调速系统调节器设计与matlab仿真验证
目录1课程设计任务及要求分析 (1)2双闭环直流调速系统 (2)2.1双闭环直流调速系统的介绍 (2)2.2双闭环调速系统的组成 (3)2.3双闭环直流调速系统的稳态结构图和静特性 (4)2.4双闭环直流调速系统的动态数学模型 (5)2.4.1起动过程分析 (5)2.4.2动态抗扰性能分析 (6)2.4.3双闭环调速系统调节器作用 (7)3双闭环控制直流调速系统的设计 (8)3.1电流调节器的设计 (8)3.1.1电流调节器的工作原理及作用 (8)3.1.2电流环结构图的简化 (8)3.1.3确定时间常数 (10)3.1.4选择电流调节器结构 (10)3.1.5计算电流调节器参数 (11)3.1.6检验近似条件 (11)3.1.7计算调节器电阻和电容 (11)3.2转速调节器的设计 (12)3.2.1转速调节器的工作原理及作用 (12)3.2.2电流环的等效闭环传递函数 (13)3.2.3转速调节器简化 (14)3.2.4确定时间常数 (15)3.2.5选择转速调节器结构 (15)3.2.6计算转速调节器参数 (16)3.2.7检验近似条件 (16)3.2.8计算调节器电阻和电容 (17)3.3超调量的计算 (17)4双闭环直流调速系统matlab仿真 (19)4.1调速系统稳定运行在满磁通时系统仿真波形图 (19)4.2 稳定运行时磁场突然减半仿真框图 (21) (23)5总结与体会 (24)6参考文献 (25)本科生课程设计成绩评定表 (26)双闭环调速系统调节器设计与matlab仿真验证1课程设计任务及要求分析由课程设计任务书的内容可知,本次课程设计要求采用双闭环调速系统,对σ≤,空载启动不可逆生产设备进行控制,以实现稳态无静差,电流超调量5%iσ≤的稳态和静态指标要求。
到额定转速时转速的超调量10%n为了实现稳态无静差,可以将电流调节器和转速调节器设计成PI调节器结构利用其特点消除稳态误差。
根据MATLAB的直流电机双闭环调速系统的设计与仿真
《机电控制系统分析与设计》课程大作业之一 基于MATLAB 的直流电机双闭环调速系统的设计与仿真1 计算电流和转速反馈系数β=U im ∗I dm =10V 4A =1.25Ωα=U nm ∗n =10500=0.02V ∙min/r2 按工程设计法,详细写出电流环的动态校正过程和设计结果根据设计的一般原则“先内环后外环”,从内环开始,逐步向外扩展。
在这里,首先设计电流调节器,然后把整个电流环看作是转速调节系统中的一个环节,再设计转速调节器。
电流调节器设计分为以下几个步骤:a 电流环结构图的简化 1) 忽略反电动势的动态影响在按动态性能设计电流环时,可以暂不考虑反电动势变化的动态影响,即 E ≈0。
这时,电流环如下图所示。
2) 等效成单位负反馈系统如果把给定滤波和反馈滤波两个环节都等效地移到环内,同时把给定信号改成U *i (s ) /β ,则电流环便等效成单位负反馈系统。
3) 小惯性环节近似处理由于T s 和 T 0i 一般都比T l 小得多,可以当作小惯性群而近似地看作是一个惯性环节,其时间常数为T ∑i = T s + T oi 简化的近似条件为电流环结构图最终简化成图。
ois ci 131T T ≤ωb 电流调节器结构的选择 1) 典型系统的选择:从稳态要求上看,希望电流无静差,以得到理想的堵转特性,采用 I 型系统就够了。
从动态要求上看,实际系统不允许电枢电流在突加控制作用时有太大的超调,以保证电流在动态过程中不超过允许值,而对电网电压波动的及时抗扰作用只是次要的因素,为此,电流环应以跟随性能为主,应选用典型I 型系统 2) 电流调节器选择电流环的控制对象是双惯性型的,要校正成典型 I 型系统,显然应采用PI型的电流调节器,其传递函数可以写成K i — 电流调节器的比例系数; τi — 电流调节器的超前时间常数3) 校正后电流环的结构和特性为了让调节器零点与控制对象的大时间常数极点对消,选择则电流环的动态结构图便成为图a 所示的典型形式,其中ss K s W i i i ACR )1()(ττ+=msT l 8i ==τRK K K i s i I τβ=a) 动态结构图:b) 开环对数幅频特性c. 电流调节器的参数计算电流调节器的参数有:K i 和 τi , 其中 τi 已选定,剩下的只有比例系数 K i , 可根据所需要的动态性能指标选取。
基于MATLAB的直流电机双闭环调速系统的设计与仿真
. . . . . MATLAB课程设计基于MATLAB的直流电机双闭环调速系统的设计与仿真班级:自动化12-2:学号:目录一、目录-----------------------------------------------------------1二、前言-----------------------------------------------------------2三、设计目的及要求--------------------------------------------3四、设计题目及参数--------------------------------------------3五、设计容过程-----------------------------------------------31.计算电流和转速反馈系数-----------------------------------------32.电流环的动态校正过程--------------------------------------------33.转速环的动态校正过程--------------------------------------------94.建立转速电流双闭环直流调速系统的Simulink仿真模型,对上述分析设计结果进行仿真-------------------------------------14六、设计总结---------------------------------------------------18七、参考文献---------------------------------------------------19二、前言:控制系统理论与技术是现代科学技术的主要容,以经广泛应用于航空与航天工业、电力工业、核能工业、石油工业、化学工业及冶金工业等众多学科和工程技术领域,并且具有经济、安全、快捷、优化设计和预测的特殊功能等优点,在非工程系统(如社会、管理、经济等系统)中,由于其规模及复杂程度巨大,直接实验几乎不可能,这是通过仿真技术的应用可以获得对系统的某种超前认识,因此仿真技术已经成为对控制系统进行分析、设计和综合研究中很有效的手段。
双闭环直流调速系统设计及matlab仿真验证(
双闭环直流调速系统设计与MATLAB仿真验证班级:姓名:学号:指导教师:摘要:对双闭环直流调速系统的电流调节器和速度调节器用PID 调节器进行设计,该方法比以前常用的PI 调节器大大地减小饱和超调,仿真结果表明,该方法十分有效。
关键词:直流调速系统;调节器;超调;仿真1双闭环直流调速系统1.1双闭环直流调速系统的介绍双闭环直流调速系统,是在单闭环直流调速系统的基础上发展起来的.转速单闭环调速系统使用PI 调节器,可以实现转速的无静差调速,采用电流截止负载环节,限制了起(制)动时的最大电流。
这对一般的要求不太高的调速系统,基本上已能满足基本要求,但电流环只是在超过临界电流值以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。
带电流截止负反馈的单闭环调速系统起动时的电流和转速波形如图 1-1-(1)所示。
当电流从最大值降低下来以后,电机转矩也随之减小,起动(调整时间s t )的时间就比较长。
在实际工作中为了尽快缩短过渡时间,希望能够充分利用晶闸管元件和电动机所允许的过载能力,使起动的电流保护在最大允许值上,并且始终允许最大值,使电力拖动系统尽可能用最大的加速度起动,到达稳定转速后,又让电流立即降下来,使转矩马上与负载相平衡,从而转入稳态运行。
这样的理想起动过程波形如图 1-1-(2)所示,这时,启动电流成方波形,而转速是线性增长的。
这是在最大电流(转矩)受限制时调速系统所能获得到的最快的起动过程。
(1)带电流截止负反馈的单闭环调速系统起动过程 (2)时间最优的理想过渡过程图1-1 调速系统起动过程的电流和转速波形I dtI dI dcr(1)(2)实际上,由于主电路电感的作用,电流不可能突变,为了实现在允许条件下最快启动,关键是要获得一段使电流保持为最大值dm I 的恒流过程。
按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么采用电流负反馈就能得到近似的恒流过程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
任务书1.设计题目转速、电流双闭环直流调速系统的设计2.设计任务某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据为:直流电动机:U n=440V,I n=365A,n N=950r/min,R a=0.04,电枢电路总电阻R=0.0825,电枢电路总电感L=3.0mH,电流允许过载倍数=1.5,折算到电动机飞轮惯量GD2=20Nm2。
晶闸管整流装置放大倍数K s=40,滞后时间常数T s=0.0017s电流反馈系数=0.274V/A (10V/1.5IN)转速反馈系数=0.0158V min/r (10V/nN)滤波时间常数取T oi=0.002s,T on=0.01s===15V;调节器输入电阻R a=40k3.设计要求(1)稳态指标:无静差(2)动态指标:电流超调量5%;采用转速微分负反馈使转速超调量等于0。
目录任务书 (I)目录 (II)前言 (1)第一章双闭环直流调速系统的工作原理 (2)1.1 双闭环直流调速系统的介绍 (2)1.2 双闭环直流调速系统的组成 (3)1.3 双闭环直流调速系统的稳态结构图和静特性 (4)1.4 双闭环直流调速系统的数学模型 (5)1.4.1 双闭环直流调速系统的动态数学模型 (5)1.4.2 起动过程分析 (6)第二章调节器的工程设计 (9)2.1 调节器的设计原则 (9)2.2 Ⅰ型系统与Ⅱ型系统的性能比较 (10)2.3 电流调节器的设计 (11)2.3.1 结构框图的化简和结构的选择 (11)2.3.2 时间常数的计算 (12)2.3.3 选择电流调节器的结构 (13)2.3.4 计算电流调节器的参数 (13)2.3.5 校验近似条件 (14)2.3.6 计算调节器的电阻和电容 (15)2.4 转速调节器的设计 (15)2.4.1 转速环结构框图的化简 (15)2.4.2 确定时间常数 (17)2.4.3 选择转速调节器结构 (17)2.4.4 计算转速调节器参数 (17)2.4.5 检验近似条件 (18)2.4.6 计算调节器电阻和电容 (19)第三章Simulink仿真 (20)3.1 电流环的仿真设计 (20)3.2 转速环的仿真设计 (21)3.3 双闭环直流调速系统的仿真设计 (22)第四章设计心得 (24)参考文献 (25)前言许多生产机械要求在一定的范围内进行速度的平滑调节,并且要求具有良好的稳态、动态性能。
而直流调速系统调速范围广、静差率小、稳定性好以及具有良好的动态性能,在高性能的拖动技术领域中,相当长时期内几乎都采用直流电力拖动系统。
双闭环直流调速系统是直流调速控制系统中发展得最为成熟,应用非常广泛的电力传动系统。
它具有动态响应快、抗干扰能力强等优点。
我们知道反馈闭环控制系统具有良好的抗扰性能,它对于被反馈环的前向通道上的一切扰动作用都能有效的加以抑制。
采用转速负反馈和PI调节器的单闭环的调速系统可以再保证系统稳定的条件下实现转速无静差。
但如果对系统的动态性能要求较高,例如要求起制动、突加负载动态速降小等等,单闭环系统就难以满足要求。
这主要是因为在单闭环系统中不能完全按照需要来控制动态过程的电流或转矩。
在单闭环系统中,只有电流截止至负反馈环节是专门用来控制电流的。
但它只是在超过临界电流值以后,强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。
在实际工作中,我们希望在电机最大电流限制的条件下,充分利用电机的允许过载能力,最好是在过度过程中始终保持电流(转矩)为允许最大值,使电力拖动系统尽可能用最大的加速度启动,到达稳定转速后,又让电流立即降下来,使转矩马上与负载相平衡,从而转入稳态运行。
这时,启动电流成方波形,而转速是线性增长的。
这是在最大电流转矩的条件下调速系统所能得到的最快的启动过程。
随着社会化大生产的不断发展,电力传动装置在现代化工业生产中的得到广泛应用,对其生产工艺、产品质量的要求不断提高,这就需要越来越多的生产机械能够实现制动调速,因此我们就要对这样的自动调速系统作一些深入的了解和研究。
本次设计的课题是双闭环晶闸管不可逆直流调速系统,包括主电路和控制回路。
主电路由晶闸管构成,控制回路主要由检测电路,驱动电路构成,检测电路又包括转速检测和电流检测等部分。
第一章 双闭环直流调速系统的工作原理1.1 双闭环直流调速系统的介绍双闭环(转速环、电流环)直流调速系统是一种当前应用广泛,经济,适用的电力传动系统。
它具有动态响应快、抗干扰能力强的优点。
我们知道反馈闭环控制系统具有良好的抗扰性能,它对于被反馈环的前向通道上的一切扰动作用都能有效的加以抑制。
采用转速负反馈和PI 调节器的单闭环调速系统可以在保证系统稳定的条件下实现转速无静差。
但如果对系统的动态性能要求较高,例如要求起制动、突加负载动态速降小等等,单闭环系统就难以满足要求。
这主要是因为在单闭环系统中不能完全按照需要来控制动态过程的电流或转矩。
在单闭环系统中,只有电流截止负反馈环节是专门用来控制电流的。
但它只是在超过临界电流dcr I 值以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。
带电流截止负反馈的单闭环调速系统起动时的电流和转速波形如图1-(a )所示。
当电流从最大值降低下来以后,电机转矩也随之减小,因而加速过程必然拖长。
(a)带电流截止负反馈的单闭环调速系统起动过程 (b)理想快速起动过程图1 调速系统起动过程的电流和转速波形在实际工作中,我们希望在电机最大电流(转矩)受限的条件下,充分利用电机的允许过载能力,最好是在过渡过程中始终保持电流(转矩)为允许最大值,使电力拖动系统尽可能用最大的加速度起动,到达稳定转速后,又让电流立即降下来,使转矩马上与负载相平衡,从而转入稳态运行。
这样的理想起动过程波形如图1-(b )所示,这时,启动电流成方波形,而转速是线性增长的。
这是在最I dLntI d O I dm I dL n t I d O I dmI dcr n n(a) (b)大电流(转矩)受限的条件下调速系统所能得到的最快的起动过程。
实际上,由于主电路电感的作用,电流不能突跳,为了实现在允许条件下最快启动,关键是要获得一段使电流保持为最大值I的恒流过程,按照反馈控制规dm律,采用某个物理量的负反馈就可以保持该量基本不变,那么采用电流负反馈就能得到近似的恒流过程。
问题是希望在启动过程中只有电流负反馈,而不能让它和转速负反馈同时加到一个调节器的输入端,到达稳态转速后,又希望只要转速负反馈,不再靠电流负反馈发挥主作用,因此我们采用双闭环调速系统。
这样就能做到既存在转速和电流两种负反馈作用又能使它们作用在不同的阶段。
1.2 双闭环直流调速系统的组成为了实现转速和电流两种负反馈分别起作用,在系统中设置了两个调节器,分别调节转速和电流,二者之间实行串级连接,如图2所示,即把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置。
从闭环结构上看,电流调节环在里面,叫做内环;转速环在外面,叫做外环。
这样就形成了转速、电流双闭环调速系统。
该双闭环调速系统的两个调节器ASR和ACR一般都采用PI调节器。
因为PI 调节器作为校正装置既可以保证系统的稳态精度,使系统在稳态运行时得到无静差调速,又能提高系统的稳定性;作为控制器时又能兼顾快速响应和消除静差两方面的要求。
一般的调速系统要求以稳和准为主,采用PI调节器便能保证系统获得良好的静态和动态性能。
图2 转速、电流双闭环直流调速系统图中U *n 、U n —转速给定电压和转速反馈电压;U *i 、U i —电流给定电压和电流反馈电压; ASR —转速调节器; ACR —电流调节器;TG —测速发电机;TA —电流互感器;UPE —电力电子变换器1.3 双闭环直流调速系统的稳态结构图和静特性图3:双闭环直流调速系统的稳态结构图双闭环直流系统的稳态结构图如图3所示,分析双闭环调速系统静特性的关键是掌握PI 调节器的稳态特征。
一般存在两种状况:饱和——输出达到限幅值;不饱和——输出未达到限幅值。
当调节器饱和时,输出为恒值,输入量的变化不再影响输出,相当与使该调节环开环。
当调节器不饱和时,PI 作用使输入偏差电压U ∆在稳太时总是为零。
实际上,在正常运行时,电流调节器是不会达到饱和状态的。
因此,对静特性来说,只有转速调节器饱和与不饱和两种情况。
1.转速调节器不饱和这时,两个调节器都不饱和,稳态时,它们的输入偏差电压都是零,因此,*Un = Un =n ⨯α=0n ⨯α (1-1)*Ui = Ui =d I ⨯β (1-2)由式(1-1)可得:n=α*nU =0n K s α1/C e U *n U ct I dE nU d0 U n ++ - ASR + U *i-I d R R βACR - U i UPE从而得到静特性曲线的CA 段。
与此同时,由于ASR 不饱和,*Ui <*im U 可知d I <dm I ,这就是说,CA 段特性从理想空载状态的Id=0一直延续到d I =dm I 。
而dm I ,一般都是大于额定电流dn I 的。
这就是静特性的运行段,它是一条水平的特性。
2.转速调节器饱和 这时,ASR 输出达到限幅值*im U ,转速外环呈开环状态,转速的变化对系统不再产生影响。
双闭环系统变成了一个电流无静差的单电流闭环调节系统。
稳态时:d I =β*imU =dm I (1-3)其中,最大电流dm I 取决于电动机的容许过载能力和拖动系统允许的最大加速度,由上式可得静特性的AB 段,它是一条垂直的特性。
这样是下垂特性只适合于0n n 〈的情况,因为如果0n n 〉,则*n n U U 〉,ASR 将退出饱和状态。
图4 双闭环直流调速系统的静特性曲线1.4 双闭环直流调速系统的数学模型1.4.1 双闭环直流调速系统的动态数学模型双闭环控制系统数学模型的主要形式仍然是以传递函数或零极点模型为基础的系统动态结构图。
双闭环直流调速系统的动态结构框图如图5所示。
图中)(s W ASR 和)(s W ACR 分别表示转速调节器和电流调节器的传递函数。
为了引出电流反馈,在电动机的动态结构框图中必须把电枢电流d I 显露出来。
图5:双闭环直流调速系统的动态结构框图 1.4.2 起动过程分析双闭环直流调速系统突加给定电压gn U 由静止状态起动时,转速调节器输出电压gi U 、电流调节器输出电压k U 、可控整流器输出电压d U 、电动机电枢电流a I 和转速n 的动态响应波形过程如图2—8所示。
由于在起动过程中转速调节器ASR 经历了不饱和、饱和、退饱和三种情况,整个动态过程就分成Ⅰ、Ⅱ、Ⅲ三个阶段。