基于弹性支承的磁悬浮轴承转子系统振动控制_华燕_张发品_周瑾
主动磁悬浮轴承的滑模自抗扰解耦控制

设计了各自由度的滑模自抗扰控制器,并利用Lyapunov理论证明了控制系统的稳定性。通过抗干
扰和信号跟踪试验仿真,结果表明,所设计的滑模自抗扰控制器实现了对磁悬浮轴承各自由度的解 耦控制,响应快,能对设定信号进行跟踪,抗干扰能力强,同时解决了磁悬浮轴承高转速运行下的陀 螺效应对控制的影响,能适用于纺纱机械转杯的高速场合。
关键词:磁悬浮轴承;自抗扰控制;滑模控制;解耦;扩张状态观测器
DOI:10. 15938/j. emc. 2021.07.014
中图分类号:TM 355
文献标志码:A
文章编号:1007-449X(2021 )07-0129-10
Sliding mode active disturbance rejection decoupling control for active magnetic bearings
摘 要:针对磁悬浮轴承系统各径向自由度之间存在的耦合关系,特别是转子高速时的陀螺效应耦 合,提出了一种基于滑模自抗扰解耦控制的方法。首先建立了考虑耦合效应的系统模型,利用扩张
状态观测器对系统的内外扰动进行估计和补偿,把多变量耦合系统解耦成4个单自由度的二阶串
联积分型子系统。为保证系统的快速动态响应,将滑模控制引入到非线性状态误差反馈控制律中,
LI Bing-lin1 >2'3, ZENG Li2, ZHANG Peng-ming3, ZHU Zhi-da2
(1. College of Automobile and Traffic Engineering, Nanjing Forestry University, Nanjing 210037, China; 2. College of Mechanical Engineering, Yangzhou University, Yangzhou 225009 , China; 3. Zhejiang Ji riggong Science & Technology Co. , Ltd. , Shaoxing 312030, China)
基于磁力等效原理的刚性磁悬浮转子系统高精度在线动平衡

基于磁力等效原理的刚性磁悬浮转子系统高精度在线动平衡刘超;刘刚;盖玉欢【期刊名称】《振动与冲击》【年(卷),期】2016(000)004【摘要】针对磁悬浮飞轮转子不平衡振动问题,提出了一种在线动平衡方法。
其基于磁轴承控制作用力与转子不平衡离心力之间的等效原理,通过检测磁轴承的控制作用力解算转子不平衡校正质量。
设计了零位移控制器,使转子绕几何轴旋转,此时磁轴承的控制作用力与控制电流呈线性关系,通过测量控制电流来准确获得磁轴承的控制作用力。
该方法消除了传统方法由动力学模型过度简化带来的误差,尤其适用于强陀螺效应的扁平型刚性磁悬浮转子系统。
实验验证了该方法的有效性,对提高磁悬浮转子系统的动平衡精度具有实际意义。
【总页数】5页(P67-71)【作者】刘超;刘刚;盖玉欢【作者单位】北京航空航天大学仪器科学与光电工程学院,北京 100191; 北京航空航天大学惯性技术重点实验室,北京 100191; 北京航空航天大学新型惯性仪表与导航系统技术国防重点学科实验室,北京 100191;北京航空航天大学仪器科学与光电工程学院,北京 100191; 北京航空航天大学惯性技术重点实验室,北京100191; 北京航空航天大学新型惯性仪表与导航系统技术国防重点学科实验室,北京 100191;北京航空航天大学仪器科学与光电工程学院,北京 100191; 北京航空航天大学惯性技术重点实验室,北京 100191; 北京航空航天大学新型惯性仪表与导航系统技术国防重点学科实验室,北京 100191【正文语种】中文【中图分类】TH133.7【相关文献】1.磁悬浮硬盘转子系统中磁力轴承控制参数的选择 [J], 刘明尧;胡业发;周祖德2.磁悬浮刚性转子系统振动机理分析与动力学建模 [J], 房建成;张会娟;刘虎3.基于磁悬浮密度计的高精度流体 PV T测量系统 [J], 徐航;蔡旭东;胡芃;金熠4.基于极性切换自适应陷波器的磁悬浮高速电机刚性转子自动平衡 [J], 巩磊; 杨智; 祝长生; 李鹏飞5.磁悬浮高速转子基于位移刚度力超前前馈补偿的高精度自动平衡方法 [J], 魏彤;向岷因版权原因,仅展示原文概要,查看原文内容请购买。
基于复数相移陷波的磁悬浮转子系统自平衡控制
Vo1.24 No.4 A pr.2016
文 章 编 号 1004—924X(2016)04—0764—07
基 于复 数 相 移 陷波 的磁 悬 浮 转 子 系统 自平衡 控 制
Aut0balancing control of m agnetically suspended m otor system s based on pl ural phase—shift notch filter
XU Xiang—bo ,CHEN Shao,ZH ANG Ya—nan
(School of Technology,Beij ing Forestry University ,Beijing 100083,China) * C0 r】 s 0 g author,E-m ail :xuxiangbo@ fu.edu.cn
Abstract:To suppress the imbalance force in magnetically suspended rotor system s,an autobalancing control strategy based on a plural phase——shift notch filter and feedforward control method was pro—— posed. T he structure and w orking principle of a suspended rotor system w ere introduce,and a m odel of the m agnetically suspended rotor system with rotor imbalance was described.The electrical charac— teristic of the imbalance force was analyzed. Then,the condition to suppress the im balance force was calculated and the result show s that the suppression errors are m ainly caused by the am plitude error and phase error from power am plifiers.By transforming the two degrees—of—freedom translational mo— tions into a single degree—of—freedom plural equation,a plural phase—shift notch filter was proposed. Its m ath equations were formulated, and the notch features of the amplitude and phase were dis— cussed. Finally, the proposed strategy w as tested and verified on a m agnetically suspended control mom ent gyro test platform. The experimental results indicate that the im balance force has been sup— pressed by 94.2 with the proposed strategy,which verifies the effectiveness of the proposed control strategy. M oreover,the proposed control strategy is characterized by sm ooth dynamic processing and
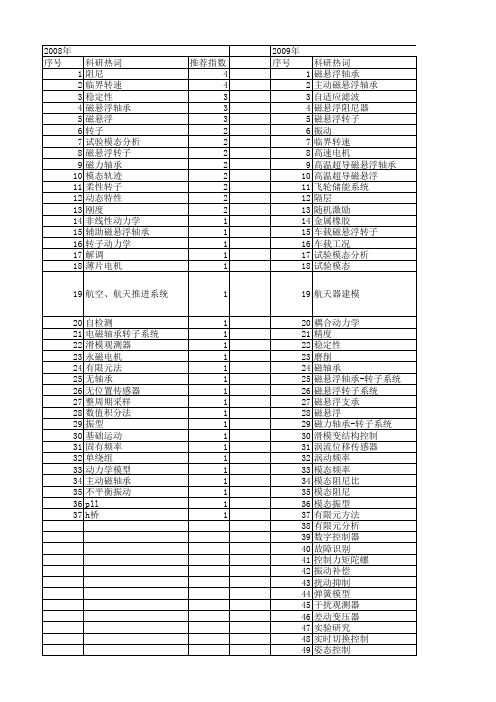
【国家自然科学基金】_磁悬浮转子系统_基金支持热词逐年推荐_【万方软件创新助手】_20140801
1 1 1 1 1 1 1 1 1
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68
垂直轴风力机 周期性振动 可控磁悬浮系统 反馈线性化 反磁悬浮 双框架控制力矩陀螺 参数估计 动框架效应 动力学耦合 动力学特性 主动磁悬浮轴承 临界转速 专家pid控制器 不平衡补偿 不平衡响应 不完全微分pid
科研热词 磁悬浮轴承 主动磁悬浮轴承 自适应滤波 磁悬浮阻尼器 磁悬浮转子 振动 临界转速 高速电机 高温超导磁悬浮轴承 高温超导磁悬浮 飞轮储能系统 隔层 随机激励 金属橡胶 车载磁悬浮转子 车载工况 试验模态分析 试验模态 航天器建模 耦合动力学 精度 稳定性 磨削 磁轴承 磁悬浮轴承-转子系统 磁悬浮转子系统 磁悬浮支承 磁悬浮 磁力轴承-转子系统 滑模变结构控制 涡流位移传感器 涡动频率 模态频率 模态阻尼比 模态阻尼 模态振型 有限元方法 有限元分析 数字控制器 故障识别 控制力矩陀螺 振动补偿 扰动抑制 弹簧模型 干扰观测器 差动变压器 实验研究 实时切换控制 姿态控制 增益自调整模糊控制 基础运动 动态特性
1 1 1 1 1 1 1 1 1 58 59 60 61 62 63 64 65 66 67 68 69 70 71
2011年
2012年 科研热词 推荐指数 序号 科研热词 主动磁悬浮轴承 5 1 磁悬浮轴承 磁悬浮轴承 3 2 磁轴承 磁悬浮 3 3 转子跌落 联合仿真 2 4 无轴承电机 磁悬浮力 2 5 开关磁阻电机 电磁转矩 2 6 变结构控制 零偏置电流控制 1 7 保护轴承 零偏置控制 1 8 高频注入法 陀螺效应 1 9 高速磁悬浮电机 锥形螺旋叶轮 1 10 飞轮 逆系统解耦 1 11 非线性干扰观测 逆系统 1 12 近似线性化 转子跌落 1 13 转子轮缘 转子动力学 1 14 超前校正 计算流体动力学(cfd) 1 15 解耦 解耦控制 1 16 航空发动机 血栓 1 17 航天器动力学 自适应滤波 1 18 自动平衡 自适应pid(proportionintegration 1 differentiation)控制 19 磁悬浮飞轮 自检测 1 20 磁悬浮轴承电主轴 综合控制策略 1 21 磁悬浮 精确非线性反馈 1 22 电磁轴承 磁滞损耗 1 23 电磁力 磁悬浮轴承弹性转子 1 24 电主轴 磁悬浮球 1 25 激光位移传感器 电磁力线性化 1 26 混合定子 球形关节 1 27 法向磨削力 球形主动关节 1 28 气隙标定 状态同步 1 29 无轴承发电机 物理原型样机 1 30 数学模型 滚动轴承 1 31 控制力矩陀螺 溶血 1 32 损耗 混合磁悬浮轴承 1 33 振动控制 涡流损耗 1 34 拍振 永磁轴承 1 35 扰动观测器 模糊控制器 1 36 悬浮力 模糊pid控制 1 37 性能测试装置 柔性转子 1 38 微框架 数学模型 1 39 微分跟踪器 数字控制器 1 40 径向位移自检测 控制特性 1 41 弹性环 接触理论 1 42 弹性减振器 拍振 1 43 开关磁阻发电机 悬浮控制 1 44 差分式涡流位移传感器 悬浮力 1 45 小波分析 形关节 1 46 图解法 弹性环 1 47 变偏置电流 应用力学 1 48 动力学耦合 广义动刚度 1 49 动力学模型 带宽 1 50 动力学响应 实时动刚度 1 51 前馈补偿 实时不平衡力补偿 1 52 刚度
重载磁悬浮轴承电控系统的研究

重载磁悬浮轴承电控系统的研究程炜超;谢振宇;张云聪;郝建胜【摘要】针对大型高速旋转机械中磁悬浮轴承电磁力小和响应(电流响应和电磁力响应)速度较慢等问题,采用了IGBT器件作为功率器件,研究了变换器的拓扑结构及其控制方法,设计制作了高电压大电流功率放大器和电压可调高频开关功率电源.将设计制作的功率放大器和开关功率电源,与实验室已有的传感器和数字控制器相结合,搭建了重载磁悬浮轴承电控系统,并将其应用于磁悬浮飞轮转子试验台进行了试验.试验及研究结果表明:重载磁悬浮轴承电控系统的最大输出电流为120 A,最大输出电压为450 V,大大提高了磁悬浮轴承的电磁力和响应速度,并且其能够保证飞轮转子在工作转速范围内稳定运行.【期刊名称】《机电工程》【年(卷),期】2019(036)006【总页数】6页(P562-567)【关键词】功率放大器;IGBT;开关电源;高频变压器;FPGA【作者】程炜超;谢振宇;张云聪;郝建胜【作者单位】南京航空航天大学机电学院,江苏南京210016;南京航空航天大学机电学院,江苏南京210016;南京航空航天大学机电学院,江苏南京210016;南京航空航天大学机电学院,江苏南京210016【正文语种】中文【中图分类】TH133.3;TH39;TM1330 引言当前,旋转机械正向高速、重载和细长方向发展。
磁悬浮轴承具有无接触、高转速和主动控制等优点,因而得到了广泛应用[1]。
一般磁悬浮轴承电控系统包括传感器、控制器、功率放大器和线性功率电源等。
单自由度磁悬浮轴承转子系统的工作原理是:首先,传感器检测转子的位移,并将位移信号转化为电压信号;其次,控制器接受上述电压信号,与预定位置的参考值做比较得出偏差,并按照相应的控制策略对偏差进行处理,得到控制信号的输出;最后,功率放大器接受控制信号,并根据该信号调整磁悬浮轴承线圈上的电流大小,以改变电磁铁A和B的吸力,从而改变转子偏离平衡位置的趋势,保证其稳定悬浮[2]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中 图 分 类 号 :V214.9 文 献 标 识 码 :A 文 章 编 号 :1001-2257(2015)12-0060-04 Abstract:Simulation analysis of the dynamic characteristics of the magnetic bearing rotor with or without damper is carried based on ANSYS to find ways to control the vibration.Magnetic bear- ing rotor system experiment table is set up,and the experiment is conducted.The results show that the introduction of an additional out-elastic support structure can effectively control the vibration. Key words:vibration control;magnetic bearing;ro- tor;ANSYS;elastic support
· 60 ·
机、压 缩 机 等 领 域 正 逐 渐 得 到 越 来 越 广 泛 的 应 用[1-2]。然而磁悬 浮 轴 承 在 抑 制 振 动 方 面 因 自 身 的 刚度阻尼调 节 范 围 较 窄,有 着 先 天 不 足,尤 其 在 系 统过临界时,容 易 因 转 子 振 幅 过 大 而 发 生 碰 磨,甚 至引发事故 。 [3-4] 因此,寻找一种有效的减振 手 段 就 显得尤为重要。
由表2可 知,利 用 ANSYS 计 算 得 到 的 临 界 转 速值与模态试验值 十 分 接 近,所 存 在 的 误 差 在 可 接 受范围内,说明 利 用 ANSYS 建 立 的 有 限 元 模 型 准 确 可 靠 ,可 用 于 对 系 统 动 态 特 性 子 实 物
HUA Yan1,ZHANG Fapin2,ZHOU Jing3 (1.Shanghai Aviation Industrial(Group)Corporation Ltd.,Shanghai 200232,China;2.Shanghai Aircraft Manufacturing
Corporation,Ltd.,Shanghai 264006,China;3.College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
图 2 转 子 有 限 元 模 型
为保证后续仿 真 分 析 的 准 确 性,通 过 有 限 元 法 计算上面建立 的 转 子 有 限 元 模 型 在 自 由-自 由 状 态 下 的 临 界 转 速 ,并 与 转 子 在 自 由 -自 由 状 态 的 模 态 试 验结果进行对比验证。 1.1 有 限 元 法 计 算 自 由 -自 由 状 态 临 界 转 速
为寻找有效的 振 动 抑 制 方 法,有 必 要 对 系 统 动 力学 特 性 进 行 充 分 分 析,这 涉 及 到 固 体 力 学 分 支———转子动 力 学。 求 解 转 子 动 力 学 问 题 通 常 采 用传递矩 阵 法 和 有 限 元 法。 因 前 者 将 转 子 系 统 简 化成一系列极简单的 集 中 质 量 点 - 梁 模 型,使 模 型 完整性和求解精 度 难 以 保 证。 后 者 相 较 于 前 者,所 建立的模型完整性 得 到 很 大 提 高,更 接 近 转 子 真 实 结构,适应 性 更 强,在 转 子 临 界 转 速 计 算 和 不 平 衡 响应分析等问题解 决 上 有 着 突 出 优 点,使 求 解 更 为 简单可行。因此,下 面 基 于 有 限 元 软 件 ANSYS,采 用有限元法建立转 子 系 统 有 限 元 模 型,以 对 其 动 态 特性进行仿真分析。
阶次
试 验/(r/min)
仿 真/(r/min)
偏差
一阶
28 882.8
28 983.7
+0.45%
二阶
77 826.0
81 983.2
+5.34%
三阶
141 911.4
《机 械 与 电 子 》2015(12)
133 570.7
-5.88%
图 6 磁 悬 浮 轴 承 支 承 转 子 系 统 原 理
· 61 ·
基于弹性支承的磁悬浮轴承转子系统振动控制
基于 ANSYS转 子 动 力 学 模 块,取 磁 悬 浮 轴 承 支承刚度为 K1=5.0×106 N/m,在 转 子 上 节 点 13 和68两处均添加 大 小 为 7.5×10-6 kg·m 的 不 平 衡 量,阻尼C1 分别取为50N·s/m、500N·s/m 和 1 000N·s/m。 为确保不发生转子碰磨,重点分析 两端径 向 磁 悬 浮 轴 承 对 应 节 点,即 节 点 18 和 97。 下 面 对 节 点 18 处 的 转 子 稳 态 不 平 衡 响 应 进 行 仿 真 。 图 7 为 节 点 18 的 稳 态 不 平 衡 响 应 。
《机 械 与 电 子 》2015(12)
基于弹性支承的磁悬浮轴承转子系统振动控制
对于转子 系 统 的 两 端 径 向 和 轴 向 磁 悬 浮 轴 承 则 选 用 COMBI214单元模拟。确定单元后利用 ANSYS 建立的转子有限元模型如图2所示。图中 M0 表示 集中质量 点,K0 表 示 弹 簧 阻 尼 单 元。 所 建 有 限 元 模型共包括111个节点,110个 梁 单 元,左 右 两 处 径 向 磁 悬 浮 轴 承 分 别 对 应 于 节 点 18 和 节 点 97。
基于弹性支承的磁悬浮轴承转子系统振动控制
华 燕1 ,张 发 品2 ,周 瑾3 (1.上海航空工业(集团)有限公司,上海 200232;2.上海飞机制造有限公司,上海 200436;
3.南京航空航天大学机电学院,江苏 南京 210016 )
Vibration Control for Magnetic Bearing Rotor System Based on Elastic Support
在 ANSYS中 基 于 上 面 建 立 的 转 子 有 限 元 模 型,并将磁悬浮轴承 的 刚 度 和 阻 尼 均 取 为 零 以 模 拟 转 子 的 自 由 -自 由 支 承 状 态 进 行 模 态 求 解 ,得 到 转 子 的 前 三 阶 弯 曲 临 界 转 速 ,如 表 1 所 示 。
表1 ANSYS 有限元分析得临界转速
比 ,得 到 图 9。 由图7和图9 可 知,外 弹 性 支 承 的 引 入 可 以 明
显降低磁悬浮转子 系 统 的 振 幅,且 外 弹 性 支 承 的 阻 尼 越 大 ,抑 制 能 力 越 强 。
图 8 系 统 原 理
图 7 不 同 磁 悬 浮 轴 承 阻 尼 下 的 稳 态 响 应
从图7可知,转 子 振 动 幅 值 随 着 磁 悬 浮 轴 承 阻 尼的增加而减小,即 磁 悬 浮 轴 承 阻 尼 可 以 有 效 抑 制 转子振动,因此为了 控 制 磁 悬 浮 轴 承 柔 性 转 子 系 统 的振动,可以考虑 增 大 阻 尼。 磁 悬 浮 轴 承 刚 度 和 阻 尼的大小依赖于控 制 系 统 中 参 数 的 设 定,而 参 数 设 定的主要目标是使转子能够稳定悬浮。为了降低磁 悬浮轴承为减小转子振动所付出的代价,可以在原有 磁悬浮轴承结构以及一般控制方法的基础上,附加额 外的刚度阻尼 支 承 ,如 电 流 变 液 阻 尼 器 、磁 流 变 液 阻 尼器以 及 挤 压 油 膜 阻 尼 器 等。另 外,现 有 文 献 也 指 出 ,合理的外弹 性 支 承 可 有 效 抑 制 系 统 振 幅 ,并 同 时 提高系统稳定性,即要减小系统振幅可以通过外加合 适的刚度阻尼结构来实现。下面对外弹性支承引入 前后转子系统不平衡响应进行对比。
图 3 转 子 一 阶 弯 曲 模 态 振 型 图 4 转 子 二 阶 弯 曲 模 态 振 型
模态阶次
一阶
二阶
三阶
临界转速/(r/min) 28 983.7
81 983.2 133 570.7
1.2 模 态 试 验 得 自 由 -自 由 状 态 临 界 转 速 采用泡沫 垫 支 承 转 子 来 模 拟 转 子 自 由-自 由 状
态进行模态振动测试试验。利用锤击激励法对转 子 上 选 定 的 10 个 测 试 点 进 行 敲 击 ,并 在 非 振 动 节 点 处布置传感器采集振动数据。分析测试所得数据, 得 到 前 三 阶 模 态 振 型 ,如 图 3~ 图 5 所 示
将有限元 法 计 算 的 转 子 自 由-自 由 状 态 下 临 界 转 速 与 模 态 试 验 所 得 结 果 对 比 ,如 表 2 所 示 。
摘要:为寻找抑 制 磁 悬 浮 轴 承 转 子 系 统 振 动 的 有效方法,基于 有 限 元 分 析 软 件 ANSYS 对 转 子 系 统附加外 弹 性 支 承 前 后 的 动 态 特 性 进 行 仿 真 对 比 分析,同时搭建磁悬 浮 轴 承 转 子 试 验 台 进 行 试 验 验 证。仿真及试验均 表 明,通 过 引 入 合 适 的 外 弹 性 支 承 结 构 ,可 以 有 效 抑 制 系 统 振 幅 。
将磁悬浮转子 系 统 置 于 外 弹 性 支 承 上,并 假 定 附加的两端支承处 刚 度 和 阻 尼 分 别 相 等,且 分 别 为 K2 和 C2,则系统原理图如图8所示。
在节 点 13 和 节 点 68 处 均 添 加 大 小 为 7.5× 10-6 kg·m 的不平衡量,取磁 悬 浮 轴 承 的 支 承 刚 度 K1=5.0×106 N/m,阻 尼 C1=50 N·s/m,外 弹 性 支承的刚度 K2=1.0×106 N/m,阻 尼 C2 分 别 取 值 为 50、500 和1 000N·s/m,得 出 在0~1 000 Hz内 磁 悬 浮 轴 承 支 承 节 点 18 处 的 不 平 衡 响 应 ,并 进 行 对