磁悬浮球控制系统的仿真研究
磁悬浮球形电机控制系统的研究
2 . 1 磁 悬浮球 形 电机 的磁 悬浮 力和 电磁转 矩模 型
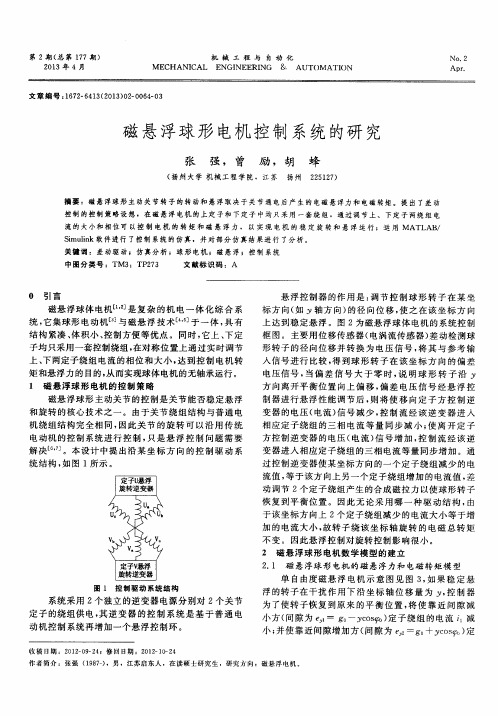
图 l 控 制 驱 动 系 统 结 构
单 自由度磁 悬 浮 电 机 示 意 图见 图 3 , 如 果 稳 定 悬 浮 的转 子在 干扰 作 用 下 沿 坐标 轴 位 移 量 为 Y, 控 制 器 为了使 转子 恢 复到原 来 的 平衡 位 置 , 将 使靠 近 间 隙减 小方( 间隙 为 , 一g 。 一y c o s  ̄ o o ) 定 子绕 组 的 电流 减
磁 悬浮球 体 电机L 1 . z ] 是 复 杂 的机 电一 体 化 综 合 系 统, 它集 球形 电动机 ] 与磁 悬 浮 技术 [ 4 于一体, 具 有 结 构紧 凑 、 体积小、 控制 方便 等优 点 。同时 , 它上 、 下 定 子均 只采用一套 控制绕组 , 在对称 位置 上通过 实 时调节 上、 下两 定子绕 组 电流 的相位 和 大小 , 达 到控 制 电机 转 矩和 悬浮力 的 目的 , 从而实现球体 电机 的无 轴承运行 。
第 2期 ( 总第 1 7 7期 )
2 0 1 3年 4 月
机 械 工 程 与 自 动 化
磁悬浮球控制系统的仿真研究
磁悬浮球控制系统的仿真研究王玲玲,王宏,梁勇(海军航空工程学院,山东烟台 264000)作者简介:王玲玲(1984—),女,硕士,讲师,主要从事控制技术研究。
本文引用格式:王玲玲,王宏,梁勇.磁悬浮球控制系统的仿真研究[J].兵器装备工程学报,2017(4):122-126.Citation:format:WANG Ling-ling, WANG Hong, LIANG Yong.Simulation and Research of Magnetic Levitation Ball Control System[J].Journal of Ordnance Equipment Engineering,2017(4):122-126.摘要:针对磁悬浮球系统的本质不稳定性,设计PID控制算法实现系统的稳定控制。
建立磁悬浮球系统的动力学模型,并对其中的非线性部分进行平衡点处的线性化,采用根轨迹校正设计超前滞后控制器。
最后采用PID控制设计,并使用根轨迹校正中零极点对系统性能影响的思想去调整PID参数,使系统的稳定性、动态性能和稳态性能满足要求。
关键词:磁悬浮球系统;PID;根轨迹法;校正磁悬浮可以用于实现各种机械结构的高速、无摩擦运转,如高速磁悬浮列车、高速磁悬浮电机、磁悬浮轴承等。
尽管磁悬浮的应用领域繁多,系统形式和结构各不相同,但究其本质都具有本质非线性、不确定性、开环不确定性等特征。
这些特征增加了对其控制的难度,也正是由于磁悬浮的这些特性,使其更加具有研究价值和意义。
本文针对磁悬浮球系统,研究其稳定控制,并使其性能指标满足要求。
1 磁悬浮球控制系统的基本原理磁悬浮球控制系统主要由铁芯、线圈、光电源、位置传感器、放大及补偿装置、数字控制器和控制对象钢球等部件组成[1],如图1所示。
当电磁铁上的线圈绕组通电时,位于磁场中的刚体受到电磁力的吸引作用。
当产生的电磁力与球体的重力相等时,球体悬浮于空中,处于不稳定的平衡状态,当它受到外界扰动时,易失去平衡。
磁悬浮的控制研究与仿真
ABS TRACT: h e e r h o i ge d g e ff e o ma n t lai g c n r l y tm st e b s fmu t d ge f T e r s a c fsn l e r e o e d m g ei f t o t s r c o n o s e i h aeo l ereo i
第2卷 第1期 5 】
文章编号 :0 6—94 ( 08 1 0 6 10 3 8 20 ) 1— 14—0 4
计
算
机
仿
真
2 8 1 0 年1月 0
磁 悬浮 的控 制 研 究 与仿 真
缪敏 娜 , 孙培德 , 张红 中
( 东华大学 信息科学与技术学 院, 上海 2 12 ) 06 0 摘要 : 自由度磁悬浮控制研究是研究多 自由度磁悬浮基础。首 先介绍基于单 自由度磁悬 浮控制实验系统 及其工作原 理 , 单
l 引言
磁悬浮技术 的发展 , 带动 了磁悬 浮轴承的广泛应用 。由
磁悬浮球控制系统分析
磁悬浮球控制系统分析简介磁悬浮球控制系统是一种先进的控制系统,将磁悬浮技术应用于球体控制,通过磁力的调节来实现对球体的悬浮控制和运动控制。
本文将对磁悬浮球控制系统进行分析和探讨。
系统组成磁悬浮球控制系统主要由以下几个组成部分构成:1.磁体:磁体是磁悬浮球控制系统中最重要的部分之一,磁体通过产生磁力来实现对球体的悬浮和运动控制。
磁体通常由电磁线圈、永磁材料等构成。
2.传感器:传感器用于感知球体的位置和姿态信息,常用的传感器包括加速度计、陀螺仪等。
传感器通过接收球体的运动信号,将信号传输给控制器进行处理。
3.控制器:控制器是磁悬浮球控制系统的核心部分,负责接收传感器的信号,计算出合适的电流和电压信号来控制磁体的工作状态。
控制器通常采用微处理器或FPGA 等逻辑设备。
4.电源:电源为磁悬浮球控制系统提供电能,常见的电源类型包括直流电源和交流电源。
电源的功率和稳定性直接影响到磁体的工作效果和系统的可靠性。
5.通信接口:通信接口用于与外部设备进行数据交互,通常采用串口、以太网等通信方式。
通过通信接口,可以实现对磁悬浮球控制系统的监控和控制。
工作原理磁悬浮球控制系统的工作原理可以简述如下:1.传感器感知信号:传感器感知球体的位置和姿态信息,将信号传输给控制器。
2.控制器计算控制信号:控制器通过对传感器信号的处理和计算,得出合适的电流和电压控制信号。
3.磁体工作状态调节:磁体根据控制信号的输入,调节磁力的大小和方向,实现对球体的悬浮和运动控制。
4.反馈调节:磁悬浮球控制系统可以通过传感器对球体的姿态进行反馈调节,保持系统的稳定性和准确性。
整个控制系统通过以上几个步骤,实现对球体的悬浮和运动控制。
应用领域磁悬浮球控制系统在许多领域都有广泛的应用,下面列举几个典型的应用领域:1.实验室实践:磁悬浮球控制系统被广泛应用于实验室实践中,可以用于展示物理原理、进行科学研究等。
2.娱乐游戏:磁悬浮球控制系统可以应用于娱乐游戏中,例如电子游戏、虚拟现实游戏等,增加游戏的趣味性和互动性。
基于PC机的磁悬浮控制系统研究_第二章磁悬浮球系统组成及系统模型_20_28

第二章磁悬浮球系统组成及系统模型2.1 磁悬浮球系统组成磁悬浮球控制系统(如图2.1)的硬件主要有以下几部分组成:图2.1 磁悬浮球控制系统结构图2.1.1磁悬浮试验平台磁悬浮试验平台由电磁铁、传感器、功率放大器和被控对象(钢球)等元器件组成。
传感器是磁悬浮系统的重要部件之一,它的性能对系统的控制精度起决定作用,因为控制系统的精度不可能超过传感器的精度。
本论文所用的磁悬浮试验平台采用的是涡流传感器,钢球相对于平衡位置的距离经过涡流传感器检测后转换为电压量,再由信号放大器放大输出。
为了消除传感器电路中的高频噪音,在传感器电路中还带有低通滤波器,其时间常数很小,对系统的影响可以忽虑不计。
功率放大器的作用是根据控制器的输出向电磁铁线圈提供电流。
由于电磁铁线圈是一个由电感和电阻组成的负载,如果功放输出的是电压,则流过负载的控制电流会由于电感的影响而产生滞后作用,这对于提高系统的动态性能很不利。
为了避免电感的滞后作用,磁悬浮试验平台采用的是电压-电流功率放大器,功率放大器的输出与电磁铁线圈相连,直接控制线圈的电流。
为了控制9功率管散热问题,采用开关功率放大器。
磁悬浮试验平台采用的电磁铁是单绕组结构,当无任何外力干扰时,激励线圈内有一定的偏置电流,由功放提供偏置电流,当有外力干扰或重力干扰时,通过改变线圈的电流来保证钢球的稳定悬浮。
2.1.2数据采集卡数据采集卡的接口一般为 ISA 和 PCI 两种接口形式。
作为一种传统的计算机接口卡总线技术,ISA(Industry StandardArchitecture)总线曾经取得了很大的成功,成为事实上的业界标准。
但是随着计算机技术的发展,ISA 总线显得越来越不能适应计算机技术的发展。
ISA 总线的缺陷主要是表现在:1.数据传输速度较低,总线采用 8M/s 的总线时钟,16bit的总线字宽,在大多数的应用中,只能达到 5MB/s 的传输速度,这些对于高速采集、控制来说是不可接受的。
磁悬浮球系统的建模与仿真设计毕业设计
声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
学生签名:年月日新疆大学毕业论文(设计)任务书班级:自动化081 姓名:论文(设计)题目:磁悬浮球系统的建模与仿真设计专题:要求完成的内容: 1. 学习系统建模方法和熟练MATLAB语言。
2. 熟悉磁悬浮球控制系统的工作原理。
3. 建立磁悬浮球控制系统的数学模型。
4. 分析磁悬浮球控制系统的稳定性。
5. 磁悬浮球控制系统的控制器(PID,模糊)的设计。
6. 用SIMULINK建模进行仿真实验进行分析。
7. 编写毕业设计说明书。
发题日期:年月日完成日期:年月日实习实训单位:地点:论文页数:页;图纸张数:指导教师:教研室主任:院长:摘要磁悬浮技术是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化技术。
随着电子技术、控制工程、处理信号元器件、电磁理论及新型电磁材料的发展和转子动力学的进展,磁悬浮技术得到了长足的发展。
本实验平台可以使用多种控制器和控制方法,适用于相关人员的研究和实验工作。
研究和设计磁悬浮球控制系统实验平台是本文的主要工作,本文在分析磁悬浮球控制系统工作原理的基础上,设计了一套磁悬浮球控制系统实验平台。
本文着重介绍控制器的设计过程。
在此基础上,本文利用了MATLAB设计了基于计算机的磁悬浮PID传统控制和模糊PID控制器。
所研制的控制器软件设计方法简单、性能稳定、实时调试方便。
关键词:磁悬浮球控制系统;稳定性;传统PID控制器;模糊PID控制器ABSTRACTMagnetic Suspension is one of typical mechanics and electronics technology,which includes the electromagnetics, electron technology, control engineering, signaldisposal, mechanics and dynamics.As the electronic technology, control engineering, processing signal components, electromagnetic theory and the development of new electromagnetic material and the progress of the rotor dynamics, maglev technology got rapid progress. This experiment platform can use a variety of controller and the control method, apply to relevant personnel of research and experimental work.This thesis focuses on the research and design of Magnetic Suspension ball Control System testing platform. Based on analyzing of Magnetic Suspension ball Control system's working principle, the thesis designs a Magnetic Suspension ball Control System testing platform.The paper emphasizes the design process.On this basis, this paper use based on MATLAB design of magnetic levitation PID traditional computer control and fuzzy PID controller. The developed controller software design method is simple, stable performance, real-time debugging is convenient.Keywords: maglev ball control system;stability;the traditional PID controller;the fuzzy PID controller目录1 绪论 (5)1.1 磁悬浮技术综述 (5)1.1.1 前言 (5)1.1.2 磁悬浮方式的分类 (5)1.1.3 磁悬浮控制方法的现状与发展趋势 (5)1.2 课题的提出及意义 (6)1.3 本论文的工作及主要内容 (6)2 磁悬浮球系统组成及系统模型 (8)2.1 磁悬浮球系统组成 (8)2.2 磁悬浮球系统工作原理 (8)2.3 磁悬浮球系统的数学模型 (8)2.4 磁悬浮球系统闭环控制 (12)3 传统控制器的研究与设计 (13)3.1 引言 (13)3.2 控制器设计 (13)3.2.1 PID控制器基本控制规律 (13)3.2.1.1 比例控制器(P调节器) (13)3.2.1.2 积分控制器(I调节器) (14)3.2.1.3 微分控制器(D调节器) (15)3.2.1.4 比例-微分控制器(PD调节器) (15)3.2.1.5 比例-积分控制器(PI调节器) (16)3.2.1.6 比例-积分-微分控制器(PID调节器) (17)3.2.2 PID控制器的参数整定 (19)3.2.3 PID调节器参数的工程整定 (21)3.2.3.1工程实验法整定 (21)3.2.3.2 Ziegler-Nichols参数整定法 (22)3.3 磁悬浮球系统PID参数整定及系统仿真 (24)3.3.1 不加控制器时磁悬浮球系统及其系统仿真 (24)3.3.2 PID参数整定的步骤及系统仿真 (28)4 模糊PID控制器的设计 (32)4.1引言 (32)4.2模糊控制器简介 (32)4.2.1模糊控制的基本原理 (32)4.2.2 模糊控制器的结构 (32)4.3 模糊控制系统的设计 (34)4.3.1 模糊控制器的结构设计 (34)4.3.2 模糊控制器的基本设计 (35)4.3.3 模糊PID控制器结构及参数自整定原则 (36)4.3.4 模糊PID控制器的设计 (37)4.3.5 基于MATLAB的模糊PID控制系统的仿真研究 (39)5 总结与展望 (42)5.1总结 (42)5.2 今后的研究方向 (42)致谢 (43)1 绪论1.1 磁悬浮技术综述1.1.1 前言磁悬浮技术属于自动控制技术,它是随着控制技术的发展而建立起来的。
磁悬浮小球 哈工大控制
研究生自动控制专业实验地点:A区主楼518房间姓名:史帅刚实验日期:2015 年 3 月28 日斑号:14S0421 学号:14S104009 机组编号:同组人:张海东朱宁高依然李俊伟成绩教师签字:磁悬浮小球系统实验报告主编:钱玉恒,杨亚非哈工大航天学院控制科学实验室磁悬浮小球控制系统实验报告一、实验内容1、熟悉磁悬浮球控制系统的结构和原理;2、了解磁悬浮物理模型建模与控制器设计;3、掌握根轨迹控制实验设计与仿真;4、掌握频率响应控制实验与仿真;5、掌握PID控制器设计实验与仿真;6、实验PID控制器的实物系统调试;二、实验设备1、磁悬浮球控制系统一套磁悬浮球控制系统包括磁悬浮小球控制器、磁悬浮小球实验装置等组成。
在控制器的前部设有操作面板,操作面板上有起动/停止开关,控制器的后部有电源开关。
2、磁悬浮球控制系统计算机部分磁悬浮球控制系统计算机部分主要有计算机、1711控制卡等;三、实验步骤1、系统实验的线路连接磁悬浮小球控制器与计算机、磁悬浮小球实验装置全部采用标准线连接,电源部分有标准电源线,考虑实验设备的使用便利,在试验前,实验装置的线路已经连接完毕。
2、启动实验装置通电之前,请详细检察电源等连线是否正确,确认无误后,可接通控制器电源,随后起动计算机和控制器,在编程和仿真情况下,不要启动控制器。
3、系统实验的参数调试根据仿真的数据及控制规则进行参数调试(根轨迹、频率、PID 等),直到获得较理想参数为止。
四、实验要求1、学生上机前要求学生在实际上机调试之前,必须用自己的计算机,对系统的仿真全部做完,并且经过老师的检查许可后,才能申请上机调试。
学生必须交实验报告后才能上机调试。
2、学生上机要求上机的同学要按照要求进行实验,不得有违反操作规程的现象,严格遵守实验室的有关规定。
五、系统建模思考题1、系统模型线性化处理是否合理,写出推理过程? 解:小球电磁的吸引力:20f2AN K i F(i,x )()4xμ=-(1)记:20fAN K K 4μ=-,则2xiK x i F )(),(=(2)对)x ,i (F 泰勒展开:)x -)(x x ,(i F )i -)(i x ,(i F )x ,F(i x)F(i,000x 000i 00++= (3)其中,00020i 00i i x x 2Ki x F(i,x)F(i ,x )i δδ====|,,002030x 00i i x x 2Ki x F(i,x)F (i ,x )x δδ===-=|, 由小球的动力学方程:22d x(t)m F(i,x )mg dt =+(4)其中,00F i x mg 0+=(,),所以可得下面式子2200000000223002Ki 2Ki d xm (i ,x )(i-i )(i ,x )(x-x )=i x dt x x i x F F =+-(5) 根据拉普拉斯变换,)()()(s x mx 2Ki s i mx 2Ki s s x 322002-= (6)将)2020x iK(mg -=带入并变换可得,200x(s)-1=i(s)a s -b (7)其中00000i i a =, b =2gx以传感器处理电路输出电压为out U (s),以功放控制电压为in U (s),out s s a 2in a 00U (s)K x(s)-(K /K )G(s)===U (s)K i(s)a s -b(8)取系统状态变量分别为1out 2out x =u ,x =u ,则•11in s •2200a 0 1 0xx =+u 2g 2g?K 0-x x x i ?K ⎛⎫⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭ ⎪ ⎪⎝⎭⎝⎭⎝⎭ (9)将实际参数带入可得,in 2121U 124990x x 0098010x x ⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎭⎫⎝⎛∙∙..(9)另外,传函为:5250300.0311s 77.8421s G 20.)(-=(10)六、根轨迹试验思考题1、根据系统模型,采用根轨迹法设计一个控制器?分别比较超前校正和迟后超前校正的特点,用仿真结果进行说明。
磁悬浮小球仿真报告
磁悬浮小球控制仿真报告一.仿真要求采用根轨迹和频域法仿真磁悬浮小球系统 二.系统建模磁悬浮系统方程可以由下面的方程描述:22d x(t)mF(i,x )mg dt =+动力学方程 2iF(i,x )K()x= 电学力学关联方程(,)+=F i x mg 0 边界方程()()=+1diU t Ri t L dt电学方程 对2xiK x i F )(),(=泰勒展开:)x -)(x x ,(i F )i -)(i x ,(i F )x ,F(i x)F(i,000x 000i 00++= )x -(x K )i -(i K )x ,F(i x)F(i,0x 0i 00++=平衡点小球电磁力和重力平衡,有(,)+=F i x mg 0|,δδ===00i 00i i x x F(i,x)F(i ,x )i ;|,δδ===00x 00i i x x F(i,x)F (i ,x )x对2iF(i,x )K()x=求偏导数得:==-20x x 00302Ki K F(i,x )x ==0i i 00202Ki K F(i,x )x此系统的方程式如下:x x 2Ki i x 2Ki )x -(x K )i -(i K dt xd m 30202000x 0i 22-=+= 拉普拉斯变换后得:)()()(s x mx 2Ki s i mx 2Ki s s x 322002-= 由边界方程 )2020x iK(mg -= 代入得系统的开环传递函数:200x(s)-1=i(s)a s -b 定义系统对象的输入量为控制电压in U ,系统对象输出量为x 所反映出来的输出电压为out U ,则该系统控制对象的模型可写为:out s s a 2in a 00U (s)K x(s)-(K /K )G(s)===U (s)K i(s)a s -b00000i i a =, b =2g x 特征方程为:200a s -b =0解得系统的开环极点为:s =取系统状态变量分别为1out 2out x =u ,x =u &系统的状态空间表示法如下:•11in s •2200a 0 1 0xx =+u 2g 2g?K 0-x x x i ?K ⎛⎫⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭ ⎪ ⎪⎝⎭⎝⎭⎝⎭ ][121x x x 0 1y =⎪⎪⎭⎫ ⎝⎛=代入实际参数,可以得到in 2121U 124990x x 0098010x x ⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎭⎫⎝⎛••..系统的状态方程可以写为⎪⎩⎪⎨⎧=+=•CXY BU AX X in 故Y U in -间的传递函数为 B A)(sI C s U s Y s G 1T in 0--==)()()(将以上参数值代入有5250300.0311s 77.8421s G 20.)(-=三.根轨迹法仿真根据系统模型,采用根轨迹法设计一个控制器 对于传递函数5250300.0311s 77.8421s G 20.)(-=的系统,设计控制器,使得校正后系统达到以下指标:调整时间2s(%2)0t s .=;最大超调量%10M p ≤;稳态误差=2%∆;步骤如下:1) 确定闭环期望极点d s 的位置,由最大超调量p M e10(%ζπ-=≤可以得到: =0.591ζ;近似取0.6ζ≈; 由cos()ζθ=;可以得到:=0.938θ(弧度)。
基于Matlab实时控制的磁浮球系统的实验研究
r a ie .Re lt o to t a lb i ame h d wh c a k o t o lrd sg r o v n e ta d p — el d z a— i c n r 1 me wi M t s t o ih c n ma ec n r l e i n mo ec n e in n a h a e
针对某 种 目标机 创建 整个 系统 或是 部分 子系 统 的可下
载执 行 的 C代 码 , 以开 展 快 速 原 型 或 硬 件 在 回路 仿
真 [ 。通 过 RT 进 行 实 时控 制 研 究 , 制 器 可 以直 1 ] W 控 接 在 Smuik环 境下 以模 块形 式 给 出 , 行 与调 试 更 i l n 运
( l g fE eto i I fr t n & Co to gn eig ej gu iest Col eo lcr nc n o mai e o nr lEn ie r ,B in nv r i n i y
o e h oo y,B in 0 1 4,C ia {tc n l g ei g 1 0 2 i hn)
Ex ei n a su yo ge alp y isd vc pr me tl td f ma lvb l h s eie c b sdo elt o to t t b a e nra-i cnrlwi Mal me h a
Ch n M el n,Yu Ja j n,Li ,S n Lin e ia i in u u Qi u a g
Ab t a t sr c :Ba e uz y l i o bo n M a l b,t e f z y PI c nt o lrha e sgne A nd b her a— s d on f z og ct ol x i ta h u z - D o r le sbe n de i d. y t e l tm ew i do st r ti a tb, t e ltm e c ntolt he m a l v b l i n w a ge n M ta he r a—i o r o t g e a lphy is xpe i e a e c s be n s c e rm nt ld vie 的磁 浮 球 a 系 统 的实验 研 究
PPT 磁悬浮球系统的建模与仿真
1 0.8 0.5
1
0.6 0
-0.5 0.4
0.5
-1
0.2 -1.5
10
0.1 0.5 0.5 0.2 1 1 0.3 1.5 1.5 0.4 2 2 0.5 2.5 2.5 0.6 33 0.7 3.5 3.5 0.8 4 4 0.9 4.5 4.5 1 5 5
00 -2 0 0 0
电气工程学院毕业论文(设计)答辩汇报
mg
钢球
7
电气工程学院毕业论文(设计)答辩汇报
在论文中,功率放大器和涡流传感器都等同 于比例环节所以磁悬浮球的闭环系统及仿真 效果如下:
4.5 4 3.5 3 2.5 2 1.5 1 0.5 0 0 x 10
45
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
8
电气工程学院毕业论文(设计)答辩汇报
根据Z-N法整定先整定出临界增益和临界振荡周 期。求解临界振荡周期和临界增益框图及仿真效 果图如下:
模糊自整定PID控制器的结构
13
电气工程学院毕业论文(设计)答辩汇报
根据模糊自整定PID控制器的结构设 计的磁悬浮模糊控制器模型如下图:
2 1.8 1.6 1.4 1.2 1 0.8 0.6 0.4 0.2 0 模 糊 PID控 制 仿 真 曲 线 传 统 PID控 制 仿 真 曲 线
0
0.2
0.4
4
电气工程学院毕业论文(设计)答辩汇报
磁悬浮球系统工作原理的分析:
由电磁场原理知,电磁铁绕组中通一定的电流会产 生电磁力,控制电磁铁绕组中的电流,使产生的电磁 力与悬浮物体的重力相平衡时,悬浮物体就可以悬浮 在空中而处于平衡状态。但是这个平衡状态是一种不 稳定平衡,这是由于电磁铁与悬浮物体之间的电磁力 大小与它们之间的距离成反比,只要平衡状态稍微受 到扰动,就会导致球掉下来或被电磁铁吸上去,因此 必须对系统采用闭环控制。当钢球受到扰动下降,钢 球与电磁铁之间的距离增大,传感器输出电压增大, 经控制器计算、功率放大器放大处理后,使电磁铁绕 组中的控制电流相应增大.电磁力增大,钢球被吸回 平衡位置,反之亦然。 5
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
磁悬浮球控制系统的仿真研究王玲玲,王宏,梁勇(海军航空工程学院,山东烟台 264000)作者简介:王玲玲(1984—),女,硕士,讲师,主要从事控制技术研究。
本文引用格式:王玲玲,王宏,梁勇.磁悬浮球控制系统的仿真研究[J].兵器装备工程学报,2017(4):122-126.Citation:format:WANG Ling-ling, WANG Hong, LIANG Yong.Simulation and Research of Magnetic Levitation Ball Control System[J].Journal of Ordnance Equipment Engineering,2017(4):122-126.摘要:针对磁悬浮球系统的本质不稳定性,设计PID控制算法实现系统的稳定控制。
建立磁悬浮球系统的动力学模型,并对其中的非线性部分进行平衡点处的线性化,采用根轨迹校正设计超前滞后控制器。
最后采用PID控制设计,并使用根轨迹校正中零极点对系统性能影响的思想去调整PID参数,使系统的稳定性、动态性能和稳态性能满足要求。
关键词:磁悬浮球系统;PID;根轨迹法;校正磁悬浮可以用于实现各种机械结构的高速、无摩擦运转,如高速磁悬浮列车、高速磁悬浮电机、磁悬浮轴承等。
尽管磁悬浮的应用领域繁多,系统形式和结构各不相同,但究其本质都具有本质非线性、不确定性、开环不确定性等特征。
这些特征增加了对其控制的难度,也正是由于磁悬浮的这些特性,使其更加具有研究价值和意义。
本文针对磁悬浮球系统,研究其稳定控制,并使其性能指标满足要求。
1 磁悬浮球控制系统的基本原理磁悬浮球控制系统主要由铁芯、线圈、光电源、位置传感器、放大及补偿装置、数字控制器和控制对象钢球等部件组成,如图1所示。
当电磁铁上的线圈绕组通电时,位于磁场中的刚体受到电磁力的吸引作用。
当产生的电磁力与球体的重力相等时,球体悬浮于空中,处于不稳定的平衡状态,当它受到外界扰动时,易失去平衡。
因此,为了使系统稳定,就必须加上反馈环节,实现闭环控制,并设计控制算法,使稳定后的性能满足要求。
图1 磁悬浮球系统示意图2 系统数学模型的建立2.1 理论分析如果忽略电磁铁的感抗对系统的影响,磁悬浮系统的数学模型可以完全由竖直方向运动方程和电磁力方程给出:(1)式中取向下方向为正。
(2)F(i,x)为电磁力且为矢量(N);x为小球质心到电磁铁磁极表面的瞬时气隙(m);i 为电磁铁绕组中的瞬时电流(A);m为小球质量(kg)。
式(2)中,假设磁通在气隙处均匀分布,且电磁铁与球体组成的磁路的磁阻主要集中在气隙处;常系数K为与空气磁导滤等定参数相关的量。
假设平衡点处小球的位移为x0,电磁铁线圈电流为i0,则平衡点处:(3)2.2 系统模型的线性化处理对式(2)进行平衡点处的泰勒展开并线性化有(4)其中。
当定义系统输入量为电流,输出量为气隙,对上式两端进行拉式变换可得传递函数模型为(5)在实际系统中采用电压值表示对气隙和电流的控制,其中电压与气隙的关系需要通过传感器标定得出,其关系式为U=K x(6)其中K为气隙与电压的关系系数(V/mm)。
而电压和电流的关系采用电压-电流型功率放大器表示,在功率放大器的线性范围内,可以将这种电压电流关系表示为:(7)其中,K为功率放大器的增益。
如此结合式(6)与式(7),气隙-电流模型式(5)变为(8)式中,U为气隙对应的电压,U为电流对应的电压。
考虑在平衡点处有,则有(9)取系统状态变量,系统的状态方程为:(10)2.3 实际物理参数表1给出具体参数值,当实验系统不同时,参数要重新测量。
另外,即便针对同一套系统,如果更改平衡位置时,带有符号*的参数要根据实际进行测量和计算。
表1 系统的物理参数值将参数代入式(9)与式(10)得到(11)(12)可以看出系统有一个极点位于复平面的右半平面,根据系统稳定性判据,磁悬浮球系统是本质不稳定的。
在Matlab中进行编程判断系统的可控性和可观性,可以得到系统的可控矩阵和可观矩阵的秩为2,即系统状态可控矩阵的秩等于系统的状态变量维数,系统的输出可控矩阵的秩等于系统输出向量的维数,所以磁悬浮实验系统既是可控又是可观,因此可以对系统进行控制器设计,使系统稳定。
3 根轨迹控制设计当系统的性能指标以时域指标提出时,可以借助根轨迹曲线获取校正装置的结构和参数。
若期望主导极点在原根轨迹的左侧,则采用相位超前校正;若期望主导极点在原根轨迹上,则通过调整根轨迹增益,满足静态性能要求;若期望主导极点在原根轨迹的右侧,则采用相位滞后校正。
3.1 使用根轨迹法设计磁悬浮球系统控制器3.1.1 超前控制器的设计设计控制器使得校正后的系统满足如下要求:调节时间t≤0.2 s(2%);超调量σ≤10%;稳态精度阶跃输入下e≤0.05。
按照超前校正的步骤,通过Matlab编程得到系统的串联超前校正控制器为(13)令输入为单位阶跃,得系统根轨迹如图2,单位阶跃响应如图3。
图2 磁悬浮系统超前校正后的根轨迹图3 一次超前校正后的单位阶跃响应通过系统的阶跃响应可以分析得出:1) 系统无超调,调节时间大约需要1.5 s,系统的稳态误差较大;2) 在10%的超调要求下可设计出校正环节阶跃响应无超调,说明超前校正对系统的动态性能具有较好的调节作用。
但过于平滑的过渡过程使系统的调节时间变慢,因此可以考虑适当降低过渡过程平稳性,使系统的调节过程加快;3) 系统的静态误差较大,超前对于稳态误差的改善较弱,可以采用滞后装置改善。
3.1.2 滞后控制器的设计通过上述一次超前校正,控制系统开环传函为按照滞后校正的步骤设计滞后网络,此时系统的开环增益为:根据稳态指标的系统的静态误差系数K0≈20;代入滞后校正的设计公式(14)可得到b=0.053 64。
选取T值,可得到滞后网络传递函数。
取T=3时,系统的根轨迹如图4。
图4 超前滞后校正后的根轨迹图5 多次超前滞后校正的单位阶跃响应调整根轨迹增益,使闭环极点处于期望位置,得到阶跃响应如图5。
此时稳态精度满足要求,但动态性能欠佳。
分析根轨迹可知:由于渐近线为,使得复平面根轨迹近似垂直于实轴,动态性能随着增益调到一定位置后,上升空间有限。
因此单纯增加零极点很难同时保证动态性能和稳态性能。
但是从图4的根轨迹可见,如果希望无穷远处根轨迹不垂直于实轴,可以使渐近线位于等角度。
又考虑到开环零点对系统稳定性的改善,只能减少校正环节的极点个数。
当然,此时校正元件分子阶次高于分母阶次,实际上不易实现。
但是可以按照这样的零极点分布思路重新设计校正方式,或采用其他控制算法。
另外,在实际设计超前滞后网络时,应将其作为一个元部件设计,而不是把超前校正和滞后校正作为分离元件分别引入。
4 PID控制器的设计利用Matlab中的Simulink设计含有PID控制器的闭环控制系统。
其中,K为比例参数,K为积分参数,K为微分参数。
根据PID参数校正的方式,先将积分微分系数设为零,只调比例环节。
当输出由发散调至等幅振荡时,K=0.6,如图6所示。
从图中可以看出,在5 s内有约13.5个周期,故周期约为P=6 s/13.5≈0.44 s。
图6 K=0.6时的系统仿真图调整参数有K=0.6K=0.36,T=0.5P=0.22,T=0.125P=0.055。
因此。
利用这三个参数得到的仿真结果系统发散,如图7所示。
此时系统根轨迹如图8所示,可以看出PID增加的两个零点过于靠近虚轴,对原系统的改善作用有限。
图7 K=0.36、K=4.55、K=0.055时通过分析知道,PID控制器传函可以表示为(15)所增加的积分环节可以调整系统的稳态性能,增加两个开环零点可以调整系统的动态性能。
其零点公式为(16)让附加的开环零点远离虚轴,最直接的方式就是增大K。
当K增大至1.5时,系统响应曲线如图9所示,此时系统的超调过大。
根据PID参数调节规则继续调节参数,当K=30,K=7,K=0.1时,系统仿真曲线如图10所示,系统的性能指标达到要求。
图8 K=0.36、K=4.55、K=0.055根轨迹图图9 K=1.5、K=4.55、K=0.055仿真图图10 K=30、K=7、K=0.1仿真曲线将上述参数代入实验系统进行仿真,得到图11所示的仿真曲线,可以看出磁悬浮球系统在PID控制下可以实现稳定控制,终值范围在±0.01 mm间波动。
当系统受到扰动时,可很快回复到平衡位置。
图11 磁悬浮球系统的半实物仿真曲线5 结论本文分析了磁悬浮球系统模型,并使用根轨迹方法进行了超前滞后控制器的设计。
仿真表明超前滞后控制器仅可改善系统的稳定性,很难大幅改善动态性能。
以根轨迹中开环零极点对系统性能影响的思路,设计PID控制器并进行参数调试,可以快速调整系统性能至最佳。
参考文献:[1] 磁悬浮实验装置[R].固高科技(深圳)有限公司,2006.[2] 张震.磁悬浮系统若干控制算法研究[D].上海:上海交通大学,2004年.[3] 薛炜杰.基于MATLAB的磁悬浮控制系统研究[D].沈阳:东北大学,2008年.[4] 张波,汤炳新.基于MatLab的磁悬浮球控制系统的设计[J].河海大学常州分校学报,2005,19(1):47-49.[5] 张占军,林小玲.磁悬浮球系统控制器的分析设计[J].机电工程,2007,24(1):19-21.[6] 吕辉榜,刘小静,卢长明.基于MATLAB的磁悬浮球实时控制设计及实验研究[J].仪表技术与传感器,2009(5):50-52.[7] 彭辉,徐锦华,侯海良.模糊控制在磁悬浮球系统实时控制中的应用[J].控制工程,2009,16(3):278-281.[8] KATSUHIKO OGATA.现代控制工程[M].4版.北京:电子工业出版社,2013. Simulation and Research of Magnetic Levitation Ball ControlSystemWANG Ling-ling, WANG Hong, LIANG Yong(Naval Aeronautical and Astronautical University, Yantai 264000, China) Abstract:In order to solve the nature unstable feature of the magnetic levitation ball system, PID control algorithm was designed to realize the stability of the system. But traditional method for parameters adjustments had some subjectivity. Firstly, the dynamic model of the magnetic levitation ball system was established, and the nonlinear part of the system was linearized at the equilibrium point. Then the root locus method was used to design the lead lag compensator, and it was shown by the simulation results that the dynamic performance was difficult to meet the demands, although it can be stable. Thus PID control was adopted. And the thinking of the influence of open loop zeros and poles on root locus was adopted to correct parameters, which made the parameters adjustments have guidance. Finally the system was compensated to meet the requirements for stability, accuracy and swiftness.Key words:magnetic levitation ball system; PID; root locus method; compensation 中图分类号:TP27文献标识码:A文章编号:2096-2304(2017)04-0122-05。