智能双轮车
备考2023年中考科学一轮复习-压强的大小及其计算-解答题专训及答案

备考2023年中考科学一轮复习-压强的大小及其计算-解答题专训及答案压强的大小及其计算解答题专训1、(2019吴兴.中考模拟) 如图为某型号中型履带式水路两栖突击车,它采用了轻质铝合金装甲车体,进一步增强了水中浮渡能力。
该两栖车装配有输出功率为1.1×10W的发动机。
(1)在海面训练过程中,发射多枚炮弹后,车体向上浮起来一些,车体底部受到水的压强将________(选填:“变大”、“变小”、“不变”);在陆地上行驶,履带的作用是________。
(2)两栖车的总质量约为30吨,在海水中漂浮时,它受到的浮力是多少牛? (3)两栖车在陆地上以30千米/时的速度匀速行驶90千米,若两栖发动机的输出功率全部用于做机械功,发动机做了多少焦耳的功?2、(2019温州.中考模拟) 温州试运行了共享汽车,市民出行可以使用智能手机就能实现租车还车的便捷。
首批共享汽车是纯电动车(如图),该车的具体参数如下表:整车质量1260kg 电动机最大功率50kW座位数 5 人电池容量23kWh轮胎与地面总接触面积100cm2最大车速120km/h快充至电池容量的 80%所用时间1h 纯电动车最大续航里程240km(2)假设司机和乘客的平均质量为60 千克,求满载时汽车对水平路面的压强(g取10N/kg)。
(3)共享汽车使用充电桩进行充电,快充至电池容量的80%,求充电桩的充电功率。
3、(2017湖州.中考模拟) 为提高车辆通行质量,福州交警在市区一些道路某些时段推出“绿波通行”,即车辆在绿波路段以如图所示的50km/h~55km/h范围内行驶,一路绿灯.在绿波时段,质量是1.2×103kg的汽车,经过绿波路段上相距2.7×103m的两个路口,用时180s,问:(1)汽车行驶的平均速度是多少?是否“绿波通行”?(2)若汽车在这段距离内行驶的牵引力保持3000N不变,则汽车的输出功率是多少?(3)若轮胎与地面接触的总面积是0.6m2,汽车静止时对水平地面的压强是多少?(g取10N/kg)4、(2017浙江.中考模拟) 小明在做有关浮力的实验中,测得装满水的溢水杯重力为4.8N,空小桶重力为0.2N,把它们放在水平桌面上,如图甲所示.再将一个质量为400g的小球轻轻放入溢水杯中,小球沉到杯底,溢出的水全部流入小桶,如图乙所示.将装有溢出水的小桶挂在弹簧测力计下,静止时测力计的示数敷如图丙所示。
智能平衡车车市场营销论文7700字_转播车车市场营销毕业论文范文模板

智能平衡车车市场营销论文7700字_转播车车市场营销毕业论文范文模板车市场营销论文7700字(一):EE智能平衡车市场营销策略分析论文摘要:本文通过分析当下市场经济中智能平衡车的发展背景和现状,以及综合比较目前市场上销路比较好的几大品牌,试图对模拟品牌EE智能平衡车进行营销。
本文对EE智能平衡车进行了简要介绍,用PEST法(政策、经济、社会、技术)分析市场背景,从而实现从4P角度EE智能平衡车进行营销策略分析。
因此,本文还对平衡车进行了风险预估和应对策略,以实现创新与发展。
关键词:EE智能平衡车市场背景营销策略风险生命周期1EE智能平衡车介绍EE智能平衡车为EE公司推出的主打平衡车,运作原理主要是建立在一种被称为“动态稳定”的基本原理上,也就是车辆本身的自动平衡能力。
透过精密且高速的中央微处理器计算出适当的指令后,驱动马达来做到平衡的效果,顺应当下人们出行休闲、环保、轻便的需求。
EE智能平衡车分为独轮与单轮两种类型,分为6寸、8寸、10寸三种型号,以满足不同年龄、不同体型人群的需要。
于2 018年4月正式进入市场。
由于过去两年内大量平衡车上路带来严重的交通问题,为避免隐患,北京、上海及一些大城市已经通过条款限制平衡车上路,所以目前来说智能平衡车做城市长距离代步工具的愿望还远远达不到。
但在娱乐休闲场所、封闭场所内,智能平衡车的使用率还是较高。
于是,EE平衡车主要是面向个体与单位、会场等。
EE平衡车可以短途代步,自带蓝牙功能,与之相配套的是手机APP,客户可以通过APP实现与平衡车的智能连接,以此进行电量查询、实时追踪、信息定位等。
还通过APP,使用户可以进行交流或建立分享会,定期举办XX公园会、XX 广场会等类似小型活动。
也能随时随地发现身边经常走同样路线的小伙伴,在代步的同时也带有社交功能,告别死板,使出行更加具有生活的气息。
总之,EE平衡车除了它本身具有的功能外,还通过APP的连接兼具社交功能。
我校三项课题通过科技成果鉴定
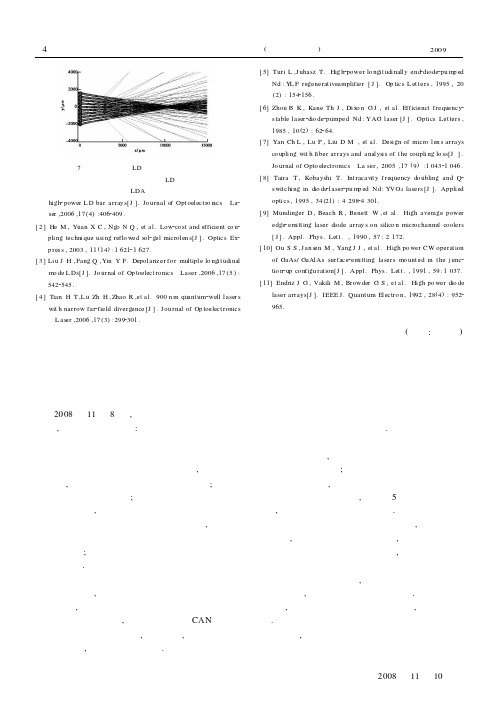
图7 采用直径小于LD 线阵周期的微柱透镜组成的柱透镜阵列一步完成对各LD 线阵快轴发散角的压缩和对LDA 整体光束的会聚hi gh 2power L D bar array s[J ].Jo urnal of Opt oel ect ro nics La 2ser ,2006,17(4):4062409.[2]He M ,Yuan X C ,Ngo N Q ,et al.Low 2co st and efficient co u 2pli ng techni que usi ng reflo wed s ol 2gel microl en s[J ].Optics Ex 2p res s ,2003,11(14):162121627.[3]Li u J H ,Fang Q ,Yin Y F.Depol arizer fo r mul tipl e lo ngi t udi nalm o de L Ds[J ].Jo urnal of Op toelect ronics Laser ,2006,17(5):5422545.[4]Tian H T ,L u Zh H ,Zhao R ,et al.900n m quant um 2well l aser swit h narrow far 2field divergence [J ].J ou rnal of Op toelect ronics L as er ,2006,17(3):2992301.[5]Turi L ,J uhasz T.Hig h 2power lo ngi t udi nall y end 2diode 2pu m p edNd :Y L F regenerat iveamplifier [J ].Op tics L et t ers ,1995,20(2):1542156.[6]Zhou B K ,Kane Th J ,Di xo n G J ,et al.Efficienct frequency 2s table l aser 2dio de 2pumped Nd :YAG l aser [J ].Opti cs Let ters ,1985,10(2):62264.[7]Yan Ch L ,Lu P ,Liu D M ,et al.Des i gn of micro l en s arraysco upli ng wit h fi ber arrays and anal ys i s of t he coupli ng lo ss[J ].Jo urnal of Opto elect ronicsLa ser ,2005,17(9):104321046.[8]Taira T ,Kobayshi T.Int racavit y f requency do ubling and Q 2s wit chi ng in dio de 2l aser 2pu m p ed Nd :YVO 4lasers [J ].Appli ed opti cs ,1995,34(21):429824301.[9]Mundinger D ,Beach R ,Benett W ,et al.High average poweredge 2em i tt ing laser diode array s o n silico n microchannel coolers [J ].Appl.Phys.Let t.,1990,57:2172.[10]Ou S S ,J an s en M ,Yang J J ,et al.High po wer C W operat ionof GaAs/GaAl As surface 2em i tt ing lasers m o unt ed in t he j unc 2tio n 2up co nfigu rat ion[J ].Appl.Phys.Let t.,1991,59:1037.[11]Endriz J G ,Vakili M ,Browder G S ,et al.Hi gh po wer dio delaser arrays[J ].IEEE J.Quant um El ectro n ,1992,28(4):9522965.(编辑:姚佳良)我校三项课题通过科技成果鉴定2008年11月8日,我校有三项科技成果通过了山东省科技厅、教育厅、淄博市科技局组织的技术成果鉴定,与会专家一致认为:三项研究成果分别在相关领域达到了国际先进、国内领先水平.由任传波教授主持完成的“公共汽车制动能量再生智能控制技术研究与产业化开发”项目和曲金玉副教授主持完成的“城市公共汽车制动能量再生及智能化控制系统研制”项目,提出了一种制动能量回收、制动能量释放与离合器控制技术相结合的方法,研究了制动能量再生智能控制技术;采用制动能量释放过程负荷调节技术,提高了制动能量释放过程的稳定性;提出了一种公共汽车停驶时,利用再生能量对发动机进行熄火和启动自动控制的方法;研究了公共汽车制动能量再生运行模式识别与控制技术,开发了5种制动能量再生系统运行模式,建立了公共汽车制动能量再生智能控制系统,提高了制动能量回收利用率.该智能控制系统经淄博市机动车排放污染物检测中心检测,主要技术指标达到了项目合同书和相关标准的要求,研制的公共汽车制动能量再生智能控制系统性能先进、结构合理、功能完善,具备了产业化的技术基础,具有潜在的经济和社会效益;研究开发的公共汽车制动能量再生智能控制关键技术具有完全自主知识产权,主要技术达到国际先进水平.由任传波、李军伟教授主持完成的“微型电动汽车关键技术研究与开发”项目,研发了微型电动汽车双轮独立驱动系统,研究了永磁直流无刷电机直接转矩控制策略及算法,分析了汽车动力学稳定性.研发了电池管理系统,采用一种新型的安时法和卡尔曼滤波法的复合算法,对蓄电池的荷电状态进行估算,实现蓄电池工作状态的在线监控,并研发了汽车用CAN 总线控制技术.研究开发的微型电动汽车整车控制、电机驱动、电池管理等关键技术先进,创新性强,具有潜在的经济和社会效益,主要技术指标达到了项目合同书和相关标准的要求,具有国内领先水平科技处 窦红梅年月日4山东理工大学学报(自然科学版)2009年 .20081110。
便携式滑板车

毕业论文(设计)(自学考试专接本)题目便携式滑板车学生姓名叶彬准考证号084914204046专业工业设计指导教师赵仕奇二〇一六年 5 月7 日声明本人郑重声明:1.持以“求实、创新”的科学精神从事研究工作。
2.本论文是我个人在导师指导下进行的研究工作和取得的研究成果。
3.本论文中除引文外,所有实验、数据和有关材料均是真实的。
4.本论文中除引文和致谢的内容外,没有抄袭其他人或其他机构已经发表或撰写过的研究成果。
5.其他同志对本研究所做的贡献均已在论文中作了声明并表示了谢意。
作者签名:日期:便携式滑板车摘要叶彬南京理工大学,南京 210044滑板项目可算得上是极限运动历史的鼻祖,很多很多的极限运动项目都是由滑板项目延伸而来的。
20世纪50年代末60年代初由冲浪运动演变而成的滑板运动,而今已成为在地球上最“酷”的运动。
本课题主要是研究双轮滑板车的发展历程与设计原理,并通过参考现有的双轮自平衡滑板车的功能结构,以轻量化和外形设计两个方面为主设计一款新型的便携式滑板,而轻量化的灵感来源则是无叶电扇,由于无叶电扇与双轮滑板车之间有着相似之处,因此根据无叶电扇的造型做参考设计双轮双轮滑板的外观造型。
在内部结构方面根据现有的资料进行设计,尽量在现有的技术方面能实现内部构造。
当然双轮滑板车还处于发展阶段,本次课题是对发展中双轮滑板车存在问题的一种解决方式的探讨。
关键词;滑板;轻量化;设计Portable scooterAbstractYebinNanjing university of science and technology,Nanjing 210044Skateboard project is the earliest history of extreme sports, extreme sports are a number of projects extending from skateboarding to. From the end of 1950s 60 years, the beginning of the evolution of surfing from the movement,has become the world's most "cool" movementAnd now the development of the balance of the car into a two wheeled self balance of the car and single wheel self balancing two vehicle types and different to the user for government departments and large enterprises, two wheeled self balancing vehicle, ordinary consumers tend to single wheeled self balancing electric vehicle. However, due to the existence of the independent wheel of the bicycle at this stage, there is a shortage of safety, and many cities in China have banned the self balancing act of Shangjie.This topic is mainly of the unicycle self balance car development and design principle, and through the reference of the existing single wheel self balancing electric vehicle, based on two aspects of light weight and shape design based design of a new type of single wheel self balancing electric vehicle and light quantify sources of inspiration is without foliaceous fan, because there is no leaf fan and single wheel self balance car between similar, so according to no leaf fan shape to do reference design single wheeled self balancing electric vehicle appearance. According to the existing data, the internal structure can be designed, and the internal structure can be realized in the existing technology..Of course, the single wheel self balancing vehicle is in the stage of development, this topic is a solution to the problem of the development of the one wheel self balancing vehicle.Key word:Skateboard , lightweight , design目录摘要 (3)Abstract (4)目录 (5)第一章绪论 (6)1.1 研究的目的与意义 (6)1.1.1 研究的意义 (6)1.1.2 研究的目的 (7)1.2 滑板车分类及衍化 (8)1.2.1 滑板车种类划分 (8)1.2.2 滑板车发展进程 (8)第二章滑板车系统构成分析 (10)2.1 功能结构分析 (10)2.2 运动原理分析 (12)2.3 外观风格研究 (12)2.3.1 造型风格 (12)2.3.2 数据参考 (14)2.3.3 色彩风格 (14)第三章设计总体思路及框架 (16)3.1设计方向 (16)3.1.1 轻量设计 (16)3.1.2 外形设计 (18)3.1.3 功能改良 (18)3.2设计计划 (18)总结 (20)致谢 (21)参考文献 (22)第一章绪论1.1 研究的目的与意义1.1.1 研究的意义滑板车(Scooter),是继传统滑板之后的又一滑板运动的新型的产品形式。
关于举办西安建筑科技大学-西安建筑科技大学-教务处

郑建校
装载机工作装置可靠性分析及整机稳定性计算
一般
吴晓君
气动喷砂控制系统设计
一般
冶金学院
刘佰龙
提高硫酸铜产品质量关键技术的基础研究
重点
张玉洁
基于能量回收功能的电容法去离子工艺研究
重点
马幼平
冷却条件对镁合金凝固组织影响研究
重点
王文礼
铁素体不锈钢凝固组织的等轴晶形成及增值机理研究
重点
宋永辉
褐煤热解动力学及热解过程的影响因素研究
重点
宋丽君
两轮智能小车直立姿态控制系统研究
重点
陈登峰
电除尘器多相流三维建模研究
重点
卫铭斐
建筑集成光伏系统中最大功率点跟踪技术研究
重点
卢英
基于视频的大空间建筑火源定位与扑救系统设计
重点
宋阳
基于ZigBee的智能家居监控系统
重点
嵇启春
双轮智能车平衡控制研究
一般
朱旭东
基于视频的公共建筑群体事件检测算法设计与实现
附件:
第九批大学本科生科研训练(SSRT)计划项目结题名单
院(系)
申报人
项目名称
项目类型
建筑学院
李岳岩
折纸空间的无限可能性研究
重点
刘大龙
对寒冷地区绿色建筑被动式采暖方式的新探索—以西安单层建筑为例
重点
张中华
遗址公园休闲情境空间研究—以大明宫为例
一般
土木学院
杨勇
土木楼交流空间开发和课外辅助教学模式的探索
重点
陈晋
钙钛矿型铁电体BNT基无铅压电陶瓷结构和性能研究
重点
张强
高居里温度无铅压电制备与应用研究
重力势能驱动的智能越障小车的设计

'底板工艺分析
材料!容
号序
夹持 $%%%
$ $%%% $
ECC的 有
机玻璃
板" 用 直
径为 (CC
的平刀钻
(CC 的
孔" 再 将
数
$
其 余 槽'
铣
孔进行深
ECC $ 到
位% 的 外
形 铣 削-
最后铣外
形尺寸到
位" 深
ECC尺 寸
到位#
机械加工工艺 工序简图
关键词重力势能%智能越障%超声波%单片机%=>RS/-T%<>UT软件
44)%$3 年 0 月在两院院士大会讲话中"习近平总书记引用 ) 礼记&大学* 名句+ 苟日新"日日新"又日新, "直指+ 我国科技 发展的方向就是创新'创新'再创新,# +惟创新者进"惟创新者 强"惟创新者胜,# 通过培养创新能力进而得到创新型人才"这 样的人才将会对社会的发展与科技的进步做出更多的贡献# 前几届全国大学生工程训练综合能力竞赛都以+ 无碳小车, 为 命题"突出强调了节能减排# 重力势能驱动的智能越障小车是 无碳 小 车 的 进 一 步 升 华" 该 命 题 更 接 近 生 活" 更 具 有 实 际 的 价值#
另一方面"传感器'单片机'舵机等部件通过程序控制小车 起到越障的功能# 如今许多家用汽车的 =<<自适应巡航技术 在一定程度上减轻驾驶员疲劳驾驶"更高端的汽车公司向无人 驾驶技术方面发展#
$&$ 设计的总体方案 重力势能驱动的智能越障小车分为两部分# 驱动部分!小 车上自带重物下落产生重力势能"通过传动系统传动到驱动 轮"进而驱动小车前进-转向越障部分!小车周围安装传感器" 采集障碍物信息"反馈给单片机"进而控制舵机执行转向越障# $&) 传动方式方案优选 方案一 链轮传动!链传动运用广泛"能够保证传动比"效 率高"负载能力很强"传递功率较大# 但该方案传动成本高"容 易磨损"传动平稳性较差# 方案二 带传动!带传动效率较高"结构简单-但智能越障 小车中两个传动轴的中心距较小"不易保证包角# 方案三 齿轮传动!齿轮传动的效率高"结构紧凑"传动比 稳定"并且传动功率和速度范围广# 综合比较"最终选取齿轮传动"因为齿轮传动的效率较高" 采用线切割技术加工铝板"齿轮精度较高"且结构紧凑"质量不 会太大# $&( 后轮驱动方式方案优选 方案一 双轮同步驱动!该方式在转向时产生轮子在地面 打滑的现象"对小车的前行造成影响-相比滚动摩擦"滑动摩擦 损失的能量更多# 方案二 双轮差速驱动!该方式可以利用差速器实现"完成 小车的轨迹行驶# 但是差速器的制造精度要求高'体积大'重 量大# 方案三 单轮驱动!单轮驱动即一个后轮固定在轴上成为 驱动轮"另一个后轮通过轴承和轴配合作为从动轮# 综上比较"单轮驱动具有结构简单'能量利用率高'传动精度 高等优点# 因此"最终选择单轮驱动作为小车的后轮驱动方式#
基于STM32的自平衡车系统的设计与实现(定稿)
基于STM32的自平衡车系统的设计与实现学院:专业:姓名:指导老师:计算机学院计算机科学与技术蔡瑞峰学号:职称:160201102848 宋琛讲师中国·珠海二○二○年五月诚信承诺书本人郑重承诺:本人承诺呈交的毕业设计《基于STM32的自平衡车系统的设计与实现》是在指导教师的指导下,独立开展研究取得的成果,文中引用他人的观点和材料,均在文后按顺序列出其参考文献,设计使用的数据真实可靠。
本人签名:日期: 2020 年 5 月 1 日基于STM32的自平衡车系统的设计与实现摘要随着新时代技术的不断革新,人们对日常使用的机器人系统有了更多的需求,因此衍生出多种不同类型、形态各异的机器人,有日常生活中的扫地机器人、汽车组装厂的机械臂,酒店中的智能服务机器人等等。
而自平衡车系统则是其中一个很具代表性的机器人科技产物。
平衡车相比其他传统代步工具而言,集轻便、无污染、速度适中、价格成本低等优点于一身,使人们的日常生活变得更加便利,成为了人们出行新的性价比极高的代步工具。
自平衡车系统是基于STM 32设计实现,通过以STM 32作为核心控制板,集成陀螺仪模块、驱动电机模块、超声波模块、电机模块等组成整个平衡车结构。
为实现小车平衡,使其实现站立平衡行走,通过运用平衡原理,测量小车倾角和角速度控制小车加速度即加入PID算法,调节参数,实现小车平衡行走。
PID算法通过对小车角度进行测量(PD算法)是小车在直立控制下保持平衡,再通过对小车测速(PI算法),使小车通过改变倾角来控制速度,进而对自身姿势进行调整。
关键词:机器人;自平衡车系统;性价比;模块;PID算法Design and implementation of self-balancing vehicle system based onSTM32AbstractWith the innovation of the new era of technology, people for daily use of robotic systems have more demand, so a variety of different types of forms are derived from the robot, a sweeping robot car assembly plant in everyday life of mechanical arm, the intelligent service robot, and so on and the balance in the hotel car system is one of the very representative of the robot technology balanced car, compared with other traditional transport sets of portable pollution-free speed moderate price low cost advantages in one, make People's Daily life become more convenient, has become a new travel the transport of high performance-price ratio The self-balancing vehicle system is designed and realized based on STM 32. By STM 32 as core control board, integrating gyroscope module driven motor module ultrasonic module of the whole car balance structure to achieve the car balance, make its standing balance walking, by using the principle of balance, measuring Angle and angular velocity control car the car acceleration to join the PID algorithm, namely to adjust parameters, to achieve the car balance walking PID algorithm based on Angle measurement algorithm (PD) is the car under control in the vertical balance, again through the car speed (PI algorithm), make the car to control the speed by changing the Angle, and then adjust their own position. Keywords: Robot; The self-balancing vehicle system;Cost performance; The module; PID algorithm目录1 绪论 (1)1.1课题研究现状 (1)1.2课题研究意义 (1)1.3课题研究内容与目标 (2)2系统总体设计 (2)2.1系统总体方案设计 (2)2.2系统平衡原理设计 (3)3系统硬件设计 (3)3.1单片机 (3)3.2电源模块 (4)3.3陀螺仪模块 (4)3.4驱动电机模块 (5)3.5电机模块 (7)4系统软件设计 (7)4.1程序初始化 (7)4.2平衡算法 (7)4.2.1角度(PD算法) (8)4.2.2速度(PI算法) (8)4.2.3串级PID (9)5系统测试 (10)5.1系统测试概述 (10)5.2系统测试内容 (10)5.3系统测试结果 (12)6 总结 (12)参考文献 (14)谢辞 (15)附录 (16)1 绪论1.1 课题研究现状随着近几年科技行业的迅速发展,因时代需要,各种平衡小车(Balance of the car)在此背景下应运而生,平衡小车作为一种新兴行业里的前沿技术之一——机器人技术,不但顺应时代潮流的发展,还符合市场需求。
智能机器人平衡车调试技巧研究
智能机器人平衡车调试技巧研究作者:丁熠来源:《中国信息技术教育》2019年第14期随着科教兴国战略决策的提出、素质教育的开展和壮心精神的提倡,教育部及社会各相关部门纷纷联手举办了面向广大中小学生,培养和激发他们创新意识和实践能力的各种比赛活动,“全国中小学信息技术创新与实践大赛”(简称NOC)就是其一,迄今已成功举办了十六届。
由于平衡移动机器人应用领域的不断扩大,其已成为机器人研究领域中不可或缺的一部分,为了适应社会的发展、技术的更新,NOC于2018年新增了智能机器人平衡车(以下简称平衡车)技巧挑战赛。
此项目主要是模拟未来社区的场景,由机器人驾驶平衡车,完成一系列社区任务,重点在培养学生的动手动脑能力,提高学生的信息技术素养。
项目一出现就受到了广大师生的高度关注,在专业人员的操作下,机器人能非常顺利地完成各项任务,但对广大师生来说,要在保证速度的前提下完成所有任务并非易事,从区赛、市赛以及全国决赛的实际比赛情况来看,平衡车的调试具有较大难度。
2018年的比赛中,有50%的选手无法顺利完成所有任务,能顺利完成任务到达终点的选手在速度上却并不理想。
因此,在比赛中如何做到稳定性和速度并存是广大师生迫切需要攻克的调试难关。
为解决这一难题,笔者对平衡车的构成、工作原理,结构、软件及行驶过程中速度的调整等进行了深入研究,并将研究结果与学校相关教师一起进行了探讨、实验。
平衡车构成1.平衡车官方物理样机的机械结构如图1所示,该机械系统主要部件包括车轮、馬达、控制器、灰度传感器、陀螺仪、电池、木质人偶、基础板以及各类支架辅助材料。
平衡车工作原理2.平衡车的控制思想是基于一级倒立摆的思想。
车身固定在两轮之上,当车身产生摆动时,陀螺仪角速度传感器会实时检测并采集到车身角度变化,反馈到控制器,控制器接受信号及时做出反应,驱动电机向相反的方向施加力矩,形成一个动态的稳定系统;当平衡车前行时与重心形成一个角度差,角速度计实时检测到角度差,传输给控制系统;控制系统输出信号驱动电机,车身重心前移,使平衡车在前进中保持稳定。
名人创业团队成功案例
名人创业团队成功案例篇一:名人创业团队成功案例】名人创业分析1:papi 酱吸金千万网红经济产业链逐渐延伸以短视频吐槽而获得高达千万粉丝的papi 酱近期获得1200 万元投资的消息引爆社会对于网红是否为下一个网络投资的关注。
说起papi 酱的走红则要回顾一下,2015 年7 月起,在凌乱的家居背景中,一位年轻美女papi 酱穿着家居服,素颜出镜,以独白秀的形式,利用变音器发布原创短视频内容,通过对口型、方言恶搞、男女关系点评等,大讲时下热点。
据报道,papi 酱在微博上的粉丝数已高达1072 万人,数量上一举超越许多当红热门明星,像岳云鹏、歌手华晨宇等人。
据了解,真格基金、罗辑思维、光源资本和星图资本宣布对papi 酱投资1200 万元,占股12%;papi 酱团队持股88% ,估值 1 亿元。
3 月21 日,罗辑思维宣布与papi 酱联合拍卖广告,广告主可以在短视频中露脸。
这起投资被业内视为首例网红成功变现案例。
可以说,papi 酱演绎了一个在半年时间内从一个无人知晓的穷学生变成估值上亿元的网红传奇。
但是,papi 酱的传奇能否复制? 网红会否成为中国互联网的下一个投资热点等等皆是未知数。
在papi 酱获千万元投资后,网红经济正被越来越多的投资者关注和重视。
招商证券分析指出,严格意义上讲,网红并非新生事物,但网红经济这一概念近两年才被提出。
实现从网红至网红经济的跨越,需要具备高质量的社交资产和恰当的。
伴随消费趋势变化,电商面临产品同质化、流量获取成本高、转化率低等诸多问题,以及消费者获取信息方式的转变,网红经济近两年来快速发展。
有业内人士指出,目前网红经济市场规模过千亿元,短期内行业或将加速扩张,长期而言,实力不同的网红群体将出现内部分层,各自配合不同的变现模式,形成较为稳定的金字塔结构。
从淘宝网红到主播再到移动视频,网红经济衍生的产业链已经比较庞大了。
从资本市场角度来看,目前至少有包括服装及电商平台、视频直播平台、及医疗板块可能会受益于网红经济。
2015年吉林大学电子设计竞赛获奖名单
通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 通信工程学院 仪器科学与电气工程学院 仪器科学与电气工程学院 仪器科学与电气工程学院 仪器科学与电气工程学院 仪器科学与电气工程学院 仪器科学与电气工程学院 仪器科学与电气工程学院 仪器科学与电气工程学院 仪器科学与电气工程学院 仪器科学与电气工程学院
杨慧婷 刘洪立 袁锦烽 余梦梦
变色龙智能小车 智能时钟 光彩人生,炫舞青春 红外遥控探测预警小车 基于arduino针对高位截瘫患者的 重力感应自助鼠标系统 红外光通信装置 便携蓝牙防盗报警装置 对于车祸报警定位的安全服务系统 基于kinetis MK60DN512的智能小车 多功能视力保护器 智能安防警报系统 基于ZigBee的智能工厂系统 智能小车设计方案 基于安卓客户端的远程智能监控系统 自动寻迹避障智能小车 单级移动倒立摆 液体点滴速度监测与控制装置 智能驾驶辅助系统 基于飞思卡尔单片机的智能草坪修剪机器 基于双控制器的高精度自动农药喷洒系统 基于51单片机的智能垃圾桶 智能窗户 声音定位相机 基于PID算法的双轮平衡小车 基于STC89C52单片机的电子秤装置 太阳能充电的方向盘加热套 音频放大器 基于非接触视线追踪的机械控制台 智能客户系统 基于STC12C5A60S2单片机的智能温控风扇 的设计 基于四旋翼飞行器的雾霾检测系统 指纹、密码门锁控制装置 懒虫起床神器--哑铃闹钟 基于zigbee技术的移动监测系统
滕佳洁 20132530 陈 泱 徐赛君 52130728 刘惠文 贺 凯 52120918 宋 钰 朱飞白 52120821 申洪光 李亚男 52121019 王 旭 冯玉芽 52121018 陈华健 张英瀚 52130603 王 艺 逄 博 52122406 韩雪山 李 越 20122426 王润涛 丛晓东 52120717 徐晔铖 饶 诚 52120507 廖崧琳 陈贵阳 52120601 杜 臣 柳文章 52120723 车玉涵 杨 洋 52130614 顾令鑫 于新艺 52120210 张 毅 唐小泉 52120309 王晓琳 张 睿 52130114 李若铭 吴东禹 52121304 高梦竹 刘 宁 52122611 王一阳 闫大伟 65120110 田 雨 李沣儒 65120111 朱金宝 白宇鑫 65120206 姜金明 蔡珊珊 65120229 左濂锐 邱 卓 65120312 王 奇 郑如意 任同阳 姜 曜 刘 涛 胡新蕾 65120332 65120513 65130620 65140114 65130436 周 瑞