无速度传感器直接转矩控制系统设计
合集下载
直接转矩控制

Ⅱ
u5 (001) u0 (000) u1 (100) u4 (011) u0 (111) u2 (110)
扇区
Ⅲ
Ⅳ
u4 (011) u0 (111) u6 (101) u3 (010) u0 (000) u1 (100)
u3 (010) u0 (000) u5 (001) u2 (110) u0 (111) u6 (101)
* 1
1
1
1
ST
T
0
1
T T * T
(a)磁链比较器
(b)转矩比较器
逆时针旋转时,磁链滞环比较器和转矩滞环比较器的输出与开关逻辑关系
比较器输出
扇区
S
ST
Ⅰ
Ⅱ
Ⅲ
Ⅳ
Ⅴ
Ⅵ
+1 u2 (110)
+1
0
u0 (111)
-1
u6 (101)
+1 u3 (010)
-1
0
u0 (000)
-1
u5 (001)
u3 (010) u0 (000) u1 (100) u4 (011) u0 (111) u6 (101)
从上式可看出(1 1 0)对应位于距离 d 轴的 方向上。
⑤ (Sa,Sb,Sc)=0 0 1 时,u5矢量
ua ub ud /3 uc 2ud /3 将 u a u b u c 代入 u S 的表达式得:
u S 2 3 [ ( u 3 d ) ( u 3 d ) ( 1 2 j2 3 ) 2 3 u d ( 1 2 j2 3 ) ]
j
u3
010
u2
110
到如右图所示 8 个静态电压矢量:
u0 (000,111)
改善转矩脉动的无速度传感器直接转矩控制系统

制系统中存在 的转矩脉动问题 ,对传 统的无速度传感器直接转矩控制方法进行 了改进。对所提出的无速度 传感器直接转
矩控制系统进行了仿真实验 。从仿真结果可 以看出系统性能 良好。
关键词:转矩脉动 无速度传感器 直接转矩控制
中图分类号 :T 2 29 文献标识码 :A 文章编号:17 -40 2 0 )0 — 5 O P 1. 6 2 8 1(0 7 46 一 3
矩 控制技 术是交流 传动 领域 的研究热 点之一 。 传统 直接转 矩 控制 的缺 点之 一是 产生 的转矩
图 I无速 度 传 感 器直 接 转 矩 控 制 系统 结构 图
脉动较 大。为了解决这个问题,已经出现了多种 改进技术,其中一种有效的方法是采用离散占空
比控制 (Bc技术 , D R) 可以在保持传统D C T 结构简单
宰 目资助:福建工程学院科 研发展基金项 目 (Y Z6 6 项 G-05 )
6 5
4— = 。— , l = 4矗, 一 鑫 — 学 一掣 a — 叱 观 L -
一
维普资讯
《 电技 术 》2 0 年 第 4期 机 07
机 电设 计 研 究
+
3 2 观测 器模 型 .
观测 器如 下 :
乏 B +f i
( 3 )
于离 散 占空 比控 制技 术 与优 化 电压 矢 量选 择相 结 合 的直 接转 矩控 制技 术 中,所 选 的工 作 电压 矢 量
只 在该 采样 周期 中作 用一 部分 时 间 ,而 剩余 的时 间选择 零 电压矢 量 ,这就 可 以减 小转矩 脉动 。综
的 同时减 小转矩 脉动 。叻R C技术 中将 占空 比的值 离 散化 。在 选择 表选 择 电压 矢 量时 , 同时根据 转
直接转矩控制
交流异步电动机直接转矩控制理论是由德国鲁尔大学 Depenbrock 教授首次 提出,后经过 ABB 公司 10 多年的逐步完善以及产品化,直接转矩控制技术已成 为当今交流传动的最先进的控制方法之一。直接转矩控制技术是在变频器内部建 立了一个交流异步电动机的软件数学模型,根据实测的直流母线电压、开关状态 和电流计算出一组精确的电机转矩和定子磁通实际值,并将这些参数值直接应用 于控制输出单元的开关状态,变频器的每一次开关状态都是单独确定的,这意味 着可以产生最佳的开关组合并对负载变化作出快速地转矩响应,并将转矩相应限 制在一拍以内,且无超调,真正实现了对电动机转矩和转速的实时控制。 4.无测速传感器及零速满转矩
8
快速可靠。 在上述的几项关键技术中,尤以无传感器技术和零速满转矩技术最为重要,
它对于保证挖掘机安全可靠的工作起着举足轻重的作用。 2.技术方案
根据目前比较成熟的高性能的交流调速技术,有矢量控制技术和直接转矩控 制技术两种方案可以选择,这两种技术方案都可以较好地解决挖掘机的技术难 题,然而直接转矩控制技术由于所采用的基于定子磁场定向的控制方法,故不需 要在电机轴端安装测速编码器来反馈转子位置信号,而且仍能实现高精度的动静 态速度和力矩控制。另外,直接转矩控制是对转矩的直接控制,故对负载的变化 相应迅速,可实现快速的过程控制,同时又具有过高的过载能力和 200%的起动 转矩。基于直接转矩控制技术的特点能够完全满足挖掘机的关键技术要求,故在 这里采用以直接转矩控制技术为核心的交流调速装置。 3.直接转矩控制的原理
近年来,大型露天矿山中的装运设备的生产力逐年提高,主要体现在大型电 气设备-挖掘机上。将交流调速系统引入到挖掘机行业上,使电控系统具有了速 度更高、功率更大、可靠性更强、效率更高和维护费用更低的优点。 1. 挖掘机的关键技术
8
快速可靠。 在上述的几项关键技术中,尤以无传感器技术和零速满转矩技术最为重要,
它对于保证挖掘机安全可靠的工作起着举足轻重的作用。 2.技术方案
根据目前比较成熟的高性能的交流调速技术,有矢量控制技术和直接转矩控 制技术两种方案可以选择,这两种技术方案都可以较好地解决挖掘机的技术难 题,然而直接转矩控制技术由于所采用的基于定子磁场定向的控制方法,故不需 要在电机轴端安装测速编码器来反馈转子位置信号,而且仍能实现高精度的动静 态速度和力矩控制。另外,直接转矩控制是对转矩的直接控制,故对负载的变化 相应迅速,可实现快速的过程控制,同时又具有过高的过载能力和 200%的起动 转矩。基于直接转矩控制技术的特点能够完全满足挖掘机的关键技术要求,故在 这里采用以直接转矩控制技术为核心的交流调速装置。 3.直接转矩控制的原理
近年来,大型露天矿山中的装运设备的生产力逐年提高,主要体现在大型电 气设备-挖掘机上。将交流调速系统引入到挖掘机行业上,使电控系统具有了速 度更高、功率更大、可靠性更强、效率更高和维护费用更低的优点。 1. 挖掘机的关键技术
基于模型参考自适应的永磁同步电机无速度传感器直接转矩控制

: v 却 凼一 )
( )
( 2 )
() 3
式 : 一l 线 时 通 。 中 : 形 变道 非
基
△ 是 差 阵 l 0 一, △。 A误 矩 , — w lI ) w ‘ ,
误差系统渐进稳定的条件是前馈通道是严格证实的, 并
于
步电机直接转矩的无速度传感器控制方案 ,并用 M ta a lb软件进行仿真.给出了仿真结果且 对结果进 行 了分析。
关键词: 模型参考 自适应:无速度:永磁 同步 电机:直接转矩控制
中图 分 类 号 :T 2 3 P 7 文 献 标 识 码 :A 文 章 编 号 :1 7 — 7 2 (0 73 0 4 — 3 4 9 一 2 0 )— 0 9 0 61
Ab t c :B s d o h o e f p r a e t m g e y c r n u o o n t e t e r f d r c o q e c n r l sr t a e nt em d lo e mn n a n ts n ho o sm t ra d h h o yo ie t t ru ot o , a
Ta Z en i ng h gy
( 天津 工 业 大学 ,天津
306) 0 10
( in [ n u t i lU te s t ,T a j n 3 0 6 ) T a j n I d sr a n v r iy i n i 0 ] 0
摘
要: 文基于直接转矩控制理论和永磁 同步电机 的数学模 型,介绍了一种基于模 型参考 自适应 的速度辨识Байду номын сангаас永磁 同 本
维普资讯
Bsdo h oe eeec d pieCnrlo e nn ant ycrnu oo pe e srSm lto ae nteMd l frneAatv oto fPmae t ge nhoosM trSedSno iua in R M S
( )
( 2 )
() 3
式 : 一l 线 时 通 。 中 : 形 变道 非
基
△ 是 差 阵 l 0 一, △。 A误 矩 , — w lI ) w ‘ ,
误差系统渐进稳定的条件是前馈通道是严格证实的, 并
于
步电机直接转矩的无速度传感器控制方案 ,并用 M ta a lb软件进行仿真.给出了仿真结果且 对结果进 行 了分析。
关键词: 模型参考 自适应:无速度:永磁 同步 电机:直接转矩控制
中图 分 类 号 :T 2 3 P 7 文 献 标 识 码 :A 文 章 编 号 :1 7 — 7 2 (0 73 0 4 — 3 4 9 一 2 0 )— 0 9 0 61
Ab t c :B s d o h o e f p r a e t m g e y c r n u o o n t e t e r f d r c o q e c n r l sr t a e nt em d lo e mn n a n ts n ho o sm t ra d h h o yo ie t t ru ot o , a
Ta Z en i ng h gy
( 天津 工 业 大学 ,天津
306) 0 10
( in [ n u t i lU te s t ,T a j n 3 0 6 ) T a j n I d sr a n v r iy i n i 0 ] 0
摘
要: 文基于直接转矩控制理论和永磁 同步电机 的数学模 型,介绍了一种基于模 型参考 自适应 的速度辨识Байду номын сангаас永磁 同 本
维普资讯
Bsdo h oe eeec d pieCnrlo e nn ant ycrnu oo pe e srSm lto ae nteMd l frneAatv oto fPmae t ge nhoosM trSedSno iua in R M S
永磁同步电机无速度传感器控制技术研究
永磁同步电机无速度传感器控制技术研究永磁同步电机是一种高性能、高效率的电机,广泛应用于工业和交通领域。
传统的永磁同步电机控制方法需要使用速度传感器来测量电机转速,但是速度传感器的安装和维护成本较高,且容易受到环境干扰。
因此,研究无速度传感器控制技术对于提高永磁同步电机的控制性能具有重要意义。
无速度传感器控制技术主要通过估计电机的转速和位置来实现控制。
其中,转速估计是无速度传感器控制技术的核心。
常用的转速估计方法有基于反电动势法、模型参考自适应系统法和卡尔曼滤波法等。
基于反电动势法是一种简单且有效的转速估计方法。
该方法通过测量电机相电压和电流,利用电机的反电动势来估计电机的转速。
但是,由于电机参数和负载变化等因素的影响,估计精度有限。
模型参考自适应系统法是一种基于模型参考自适应控制理论的转速估计方法。
该方法通过建立电机的数学模型,利用模型参考自适应控制器来估计电机的转速。
该方法具有较高的估计精度,但是需要较为准确的电机模型,且计算量较大。
卡尔曼滤波法是一种基于状态估计的转速估计方法。
该方法通过建立电机的状态空间模型,利用卡尔曼滤波器来估计电机的转速。
该方法具有较高的估计精度,且对电机和负载的变化具有较好的适应性。
在无速度传感器控制技术的研究中,还需要考虑系统的稳定性和鲁棒性。
稳定性是指系统在受到干扰或参数变化时能够保持稳定的性能。
鲁棒性是指系统对于参数不确定性和外部扰动的鲁棒性。
因此,研究无速度传感器控制技术还需要考虑稳定性分析和鲁棒性设计。
总之,无速度传感器控制技术是永磁同步电机控制领域的研究热点。
通过对转速估计方法的研究和改进,可以实现对永磁同步电机的高精度、高效率控制,提高其在工业和交通领域的应用价值。
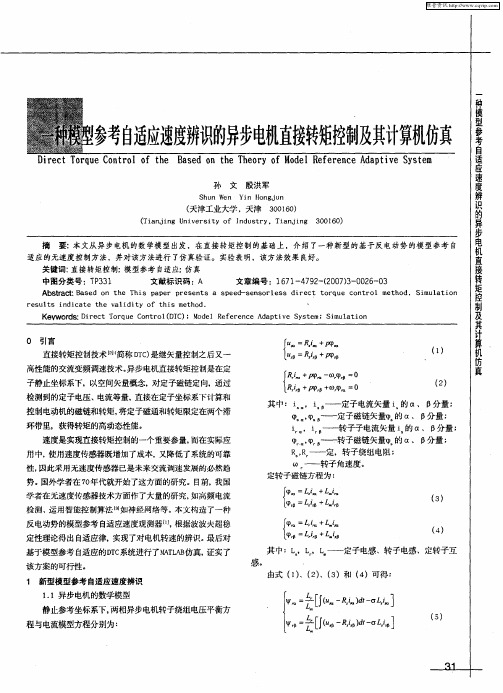
一种模型参考自适应速度辨识的异步电机直接转矩控制及其计算机仿真
— —
控 制电动机的磁链和转矩 , 将定子磁通和转矩限定在两个滞
环带里,获得转矩 的高动态性能 。
速度是实现直 接转矩控制的一个重要参量, 而在实 际应 用中, 使用速度传感器既增加了成本, 又降低了系统 的可靠
性, 囚此采用无速度传感器已是未来 交流涮速发展 的必 然趋
,
转子磁链矢量 的 o D 。 【 分量 ;
0 引 言
l R + “ = ‘ 御
直接转矩控制技术 【 简称 D C 是继矢量控制之后又一 2 H T) 高性 能的交流变频 调速 技术 。 异步电机直接转矩控制是在定 子静止坐标系下,以空间矢量概念 , 定子磁链定 向。通过 对 检 测到的定子 电压 、电流等量,直接在 定子坐标系下计算和
【p ‘+ p p 御,
l + 御 一 ,,= ∞ p0 I, + p ∞ m= f 御,+ 0 , D
() 2
其 中 :i 。 ,i B 。 —— 定子电流矢量 i 的 o、 D分量 : 【 ‘ , —定子磁链矢量 的 o、 D分量 : P 。— s 【 i ,i B ——转 子子电流矢 量 i 的 o、 D 。 【 分量 ;
两边微分,可得反 电动势的近似模型为 :
其 中: f ——转子时间常数, f - R : - /
1●● ●, J
甩
1
tr
+
L
—
—
。
电机漏感,L L L L。 = s -
式 ( )称为电压方程,式 ( )成为电流方程。 5 6
n p 1●● ●, J
静止参考坐标 系下, 相异步 电机转子绕组电压平衡方 两 程与 电流模型方程分 别为 :
维普资讯
控 制电动机的磁链和转矩 , 将定子磁通和转矩限定在两个滞
环带里,获得转矩 的高动态性能 。
速度是实现直 接转矩控制的一个重要参量, 而在实 际应 用中, 使用速度传感器既增加了成本, 又降低了系统 的可靠
性, 囚此采用无速度传感器已是未来 交流涮速发展 的必 然趋
,
转子磁链矢量 的 o D 。 【 分量 ;
0 引 言
l R + “ = ‘ 御
直接转矩控制技术 【 简称 D C 是继矢量控制之后又一 2 H T) 高性 能的交流变频 调速 技术 。 异步电机直接转矩控制是在定 子静止坐标系下,以空间矢量概念 , 定子磁链定 向。通过 对 检 测到的定子 电压 、电流等量,直接在 定子坐标系下计算和
【p ‘+ p p 御,
l + 御 一 ,,= ∞ p0 I, + p ∞ m= f 御,+ 0 , D
() 2
其 中 :i 。 ,i B 。 —— 定子电流矢量 i 的 o、 D分量 : 【 ‘ , —定子磁链矢量 的 o、 D分量 : P 。— s 【 i ,i B ——转 子子电流矢 量 i 的 o、 D 。 【 分量 ;
两边微分,可得反 电动势的近似模型为 :
其 中: f ——转子时间常数, f - R : - /
1●● ●, J
甩
1
tr
+
L
—
—
。
电机漏感,L L L L。 = s -
式 ( )称为电压方程,式 ( )成为电流方程。 5 6
n p 1●● ●, J
静止参考坐标 系下, 相异步 电机转子绕组电压平衡方 两 程与 电流模型方程分 别为 :
维普资讯
直接转矩控制调速系统设计与实现

变频 调速 是 当前 研 究 的热点 。
直接 转矩 控 制是 变频 调速 的一种 技术 ,它 直 接 在定 子坐 标 系 下分 析 交流 电动 机 的模 型 , 用 定子 磁场 定 向 , 接 控制 电动 机 的 采 直 转矩 和 磁链 , 眼 于 转矩 的快 速 响应 , 着 以获得 高 效 的控 制 性 能 , 省 掉 了复 杂的 矢量 坐 标旋 转变 换和 计 算 , 号 处理 工作 简 单 , 信 电机 参 数 的影 响较 小 , 鲁棒 性好 , 有广 阔 的发 展前 景和 应 用前 景 。 具 1 基 本 原 理
() 2 在数 字 电路每 个 芯 片 的供 电 电源 处 都 加上 01 F的 高频 . 去 耦 电容 , 以消 除数 字线 路 上尖 峰 电流造 成 的影 响 。 ()在 系统 的模 拟部 分 与数字 部 分 的接 口处 以及控 制 系 统与 3 通 讯 总线 的 接 口处 , 采 用光 耦 隔 离 , 都 以防 相互 干 扰 , 讯 总 线 的 通
直接转矩控制是变频调速的一种技术它直接在定子坐标系下分析交流电动机的模型采用定子磁场定向直接控制电动机的转矩和磁链着眼于转矩的快速响应以获得高效的控制性能省掉了复杂的矢量坐标旋转变换和计算信号处理工作简单电机参数的影响较小鲁棒性好具有广阔的发展前景和应用前景
● 量 堑 sj x 坌 ! eun hye iF
情 况 ,软件 系 统 选 用 C语 言 中嵌 入 汇 编 语 言 语 句 的 方 法进 行 编 表 。磁链 和 转矩 的滞 环 均可 以设置 多级 , 且其 宽度 可 变 , 并 滞环 宽 程 。软 件 系统 主要 包括 主模 块 、 S D P初始 化模 块 、 定时 器周 期 中 断 度越 小 , 关频 率越 高 , 开 控制 越 精确 。直 接转 矩控 制 的基 本 原理 如 服 务程 序 以及 软件 抗 干扰 措施 等 几部 分 。
直接 转矩 控 制是 变频 调速 的一种 技术 ,它 直 接 在定 子坐 标 系 下分 析 交流 电动 机 的模 型 , 用 定子 磁场 定 向 , 接 控制 电动 机 的 采 直 转矩 和 磁链 , 眼 于 转矩 的快 速 响应 , 着 以获得 高 效 的控 制 性 能 , 省 掉 了复 杂的 矢量 坐 标旋 转变 换和 计 算 , 号 处理 工作 简 单 , 信 电机 参 数 的影 响较 小 , 鲁棒 性好 , 有广 阔 的发 展前 景和 应 用前 景 。 具 1 基 本 原 理
() 2 在数 字 电路每 个 芯 片 的供 电 电源 处 都 加上 01 F的 高频 . 去 耦 电容 , 以消 除数 字线 路 上尖 峰 电流造 成 的影 响 。 ()在 系统 的模 拟部 分 与数字 部 分 的接 口处 以及控 制 系 统与 3 通 讯 总线 的 接 口处 , 采 用光 耦 隔 离 , 都 以防 相互 干 扰 , 讯 总 线 的 通
直接转矩控制是变频调速的一种技术它直接在定子坐标系下分析交流电动机的模型采用定子磁场定向直接控制电动机的转矩和磁链着眼于转矩的快速响应以获得高效的控制性能省掉了复杂的矢量坐标旋转变换和计算信号处理工作简单电机参数的影响较小鲁棒性好具有广阔的发展前景和应用前景
● 量 堑 sj x 坌 ! eun hye iF
情 况 ,软件 系 统 选 用 C语 言 中嵌 入 汇 编 语 言 语 句 的 方 法进 行 编 表 。磁链 和 转矩 的滞 环 均可 以设置 多级 , 且其 宽度 可 变 , 并 滞环 宽 程 。软 件 系统 主要 包括 主模 块 、 S D P初始 化模 块 、 定时 器周 期 中 断 度越 小 , 关频 率越 高 , 开 控制 越 精确 。直 接转 矩控 制 的基 本 原理 如 服 务程 序 以及 软件 抗 干扰 措施 等 几部 分 。
无刷直流电机无位置传感器直接转矩控制
Ab ta t A drc ru o t lo e s resbu hesDC moo rs ne ip p r T ec nrl sr c: i t oq ec nr f r n ols rs l trip ee tdi t s a e h o t e t o s s s nh o
实验 结 果表 明本文 提 出的控 制方 法有 效可行 。 关键 词 :无刷 直流 电机 无位 置传 感 器控制 直 接转 矩控 制
中 图 分 类 号 :T 3 M3 文献标 识码 :A 文 章 编 号 : 10 .8 22 1 ) 0 .G 10 0 34 6 (0 2 90 .4
制用于无刷直流 电机的研 究还存在 一定的困难 。
0 引言
电机 的 控 制 ,本 质 上 是 对 电机 转 矩 的控 制 ,
般 来 说 ,我 们 都 是 通 过 控 制 电机 电流 来 控 制 转 矩 的 【2 但 这 种 方 法 的转 矩 响应 速 度 相 对 来 说 较 1] I,
一
本 文提 出 的控 制 采 用 三 三 导通 方 式 ,更 直 接
meh dp ee td rq i s osrain o h u otg n h he-h s ttrc ret o to rsne eur bev t f teDC bs vl e a d te tre aesao urns f e o a p buhesDC moo, n si t e u,oq e a drtr oio n lso oo nodrt cnrl rsl tra det et x tru, n oo st na ge fm trI re o t s ma h f l p i o o
矢量分析方 法,采用定子磁场 定 向l,在 更简单 引