飞行器结构力学电子教案4-1
飞行器结构设计第4-6章
2005-4-24 18:42
44
飞机结构的可靠性要求
❖ 满足强度、刚度、安全寿命、损伤容限的可靠性要求; ❖ 结构的变形不能影响操纵、影响相对位置的要求; ❖ 不能出现操纵效能降低、反效甚至失效; ❖ 不能出现颤振临界速度的降低。
2005-4-24 18:42
55
飞机结构的维修性与经济性要求
❖ 要求结构维修的易检性(可达性)(通道、口盖); ❖要求结构的易修理性(修补、更换、拆装); ❖要求维修的经济性。(冰山效应 , Concord)
2005-4-24 18:42
22
4.0 绪 言
飞机结构设计的总体技术要求 ■飞机结构设计的基本特征
① 安全性/可靠性; ② 维修性/经济性。
① 在保障结构安全/功能可 靠的前提下,重量最轻;
② 群体的社会化技术活动,
需要标准与工作规范。
2005-4-24 18:42
33
飞机结构承载的安全性要求 (五不准)
开口:各种功能性/维修性
装载:乘员/货物;机载设备、
起落架、连接各部件
2005-4-24 18:42
11 11
本章要点
机身结构受力型式的布局设计 机身加强框结构设计 机身与各部件的连接设计 结构开口补强设计
2005-4-24 18:42
12 12
6.1 机身结构的受力布局形式
桁梁式: (与梁式薄蒙皮机翼结构形式相当) 蒙皮较薄,剪力则全部由蒙皮承担,少数几根桁梁;
开口较少处宜采用桁条式(机身尾段)。
无开口或气动载荷较大,要求蒙皮刚度大的结构段,
宜采用硬壳式,头锥、机头罩、尾锥部位。
2005-4-24 18:42
16 16
99
西工大飞行器结构力学电子教案5-1
e
= [ S ]{δ }e = S ⋅ δ e
式中, 称为元素的应力矩阵 式中,[ S ]称为元素的应力矩阵。 称为元素的应力矩阵。 (4)杆元素轴力 )杆元素轴力N 的杆元素, 对于等面积 A 的杆元素,其轴力用节点位移表示为
EA N = σA = [− 1 L ij
1]{ δ } e
(5)平衡条件与刚度矩阵 ) 作用在杆元素上的结点力与杆轴力,满足平衡条件: 作用在杆元素上的结点力与杆轴力,满足平衡条件:
5.2 杆元素与桁架位移法求解
本节将由最简单的杆元素 和桁架开始, 和桁架开始,逐步介绍矩 阵位移法的基本原理和计 算过程 。
5.2 杆元素与桁架位移法求解
对于图示桁架, 对于图示桁架,编号为 1、2、3、4、5、6的铰结 、 、 、 、 、 的铰结 点称为结点 结点, 点称为结点,两结点之间 的链杆称为杆元素 杆元素, 的链杆称为杆元素,如杆 元素12、杆元素23等 元素 、杆元素 等。 位移法中, 位移法中,将以每个结 点处的位移(结点位移)作为基本未知量, 点处的位移(结点位移)作为基本未知量,建立关于未知结点 位移的方程,首先求出结点位移,然后利用求出的结点位移, 位移的方程,首先求出结点位移,然后利用求出的结点位移, 再求出其他的物理量(如元素应变、应力、内力等)。 再求出其他的物理量(如元素应变、应力、内力等)。 在图示坐标系中,由于每一杆元素的方位不尽相同, 在图示坐标系中,由于每一杆元素的方位不尽相同,为具普 遍性,任取其中一杆元素i ,首先来研究杆元素的平衡关系。 遍性,任取其中一杆元素 j,首先来研究杆元素的平衡关系。
4、飞行力学第一章(2)

dχ φ = μ = 0, β = 0, =0 dt
动力学方程可简化为:
dV ⎫ = T cos(α + ϕ ) − D − mg sin γ m ⎪ 铅垂面内质 ⎪ dt ⎬ dγ − mV = −T sin(α + ϕ ) − L + mg cos γ ⎪ 心运动方程 ⎪ dt ⎭
飞行迎角不太大时,上述方程组可进一步简化:
重力 重力的方向沿地面坐标系方向给出,再用转换矩阵可 得到在航迹坐标系上的投影
所以
⎡ gx ⎤ ⎡ − g sin θ a ⎤ ⎡0⎤ ⎢ ⎥ ⎥ ⎢0⎥ = m⎢ m ⎢ g y ⎥ = Lkg m ⎢ ⎥ 0 ⎢ ⎥ ⎢ gz ⎥ ⎢ g cos θ a ⎥ ⎢ g⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦k
角速度分量
ω = ψ a + θa
⎡ω x ⎤ ⎡ 0 ⎤ ⎡ 0 ⎤ ⎡ − ψ a sin θ a ⎤ ⎡ − χ sin γ ⎤ ⎥ ⎢ ⎥ ⎢ 0 ⎥ + ⎢θ ⎥ = ⎢ ⎥= ⎢ γ θa ⎥ ⎢ω y ⎥ = Lkg ⎢ ⎥ ⎢ a ⎥ ⎢ ⎥ ⎢ ⎢ω z ⎥ ⎢ψ a ⎥ ⎢ 0 ⎥ ⎢ ψ a cos θ a ⎥ ⎢ χ cos γ ⎥ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎣ ⎦k
1.4.1 动坐标系中质心运动方程
速度和角速度在动坐标系的投影
V = V x i + V y j + Vz k
ω = ω xi + ω y j + ωzk
速度的微分
a
ω
Vi
V i = ω a = ω r sin( θ ) ⇒ Vi = ω × r
r
θ
O
单位矢量的微分
dV y dVz dV dV x i+ = j+ k dt dt dt dt dj dk di + Vx + V y + Vz dt dt dt
飞行器结构力学课程教学大纲

教学内容
学时
教学方式
作业及要求
基本要求
考查方式
飞行器结构设计流程
1
课堂教学/讨论
无
理解概念
考试
飞行器结构及其载荷
3
课堂教学/场地教学
调研/计算
部分掌握
考试/作业
薄壁梁的弯曲
2
课堂教学/课堂实验
计算
熟练掌握
考试/作业
薄壁梁的剪切
3
课堂教学
计算
熟练掌握
考试/作业
薄壁梁的扭转
课程教学大纲(course syllabus)
*学习目标(Learning Outcomes)
1了解飞行器结构设计的流程。(A5.2)
2掌握薄壁梁结构分析理论,掌握翼梁、机翼、机身等典型飞行器部件内力的建模和计算方法。(A5.2.1,A5.2.2,A5.2.3)
3学习薄板弯曲理论,掌握薄板弯曲问题的理论解。(A5.2.1,A5.2.2,A5.2.3)
飞行器结构力学课程教学大纲
课程基本信息(Course Information)
*课程代码
(Course Code)
AV310
*学时
(Credit Hours)
48
*学分
(Credits)
3
*课程名称
(Course Name)
飞行器结构力学
AircraftStructural Mechanics
课程性质
The core purpose of this course is toequip studentswiththe basic capabilities of aircraft structuralmodeling andanalysis.Throughthe studying ofthis course students can understand theprocess andrequirements of aircraftstructural design,mechanical characteristicsof aircraft structure, the methodto simplifying and calculating on aircraft structure. They are going to have the abilityto completethepreliminary design,thestress analysis andthe instabilitydetermination on the aircraft structural component. Throughthecurriculumproject,they will also get exercises on teamwork,expression, referencesorganization andreport writing.
朱明zhubob结构力学4-2静力法作影响线例4-1_4-3
FQLE
1
1 4
FyB影响线
2 2
FNAC
Fy 0 :
3 8
FQLE
2 2
FNAC
2 2
FNAE
x 8d
FNAC
2x 8d
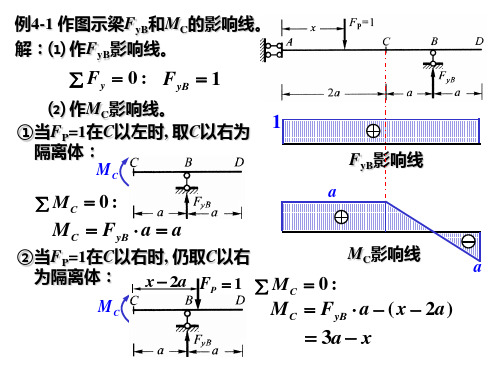
例4-2 作图示结构FNAC和梁FQLE 、FQRE和MD的影响线。
解:先作支座反力影响线。
FyA
x 4d
,
FyB
1 x 4d
解:先作支座反力影响线。
FyA
x 4d
,
FyB
1 x 4d
51
4
1
4
d
2
FyA影响线
1
FyB影响线
(4)作横梁MD 影响线 ①当FP=1在D以右时, 取横梁
的D以左部分为隔离体:
MD
d
2 2
FNAC
MD 0:
MD
2 2
FNAC
d
x 8
FNAC
2x 8d
例4-2 作图示结构FNAC和梁FQLE 、FQRE和MD的影响线。
解:先作支座反力影响线。
FyA
x 4d
,
FyB
1 x 4d
51
4
FyA影响线
(3)作横梁FQRE 影响线 ①当FP=1在E以右时, 取结构
的E以左部分为隔离体:
FQRE
1
1
4
FyB影响线
3
4
Fy 0 :
FQRE
FyA
x 4d
FNAC
2x 8d
例4-2 作图示结构FNAC和梁FQLE 、FQRE和MD的影响线。
飞行器结构力学理论基础讲义
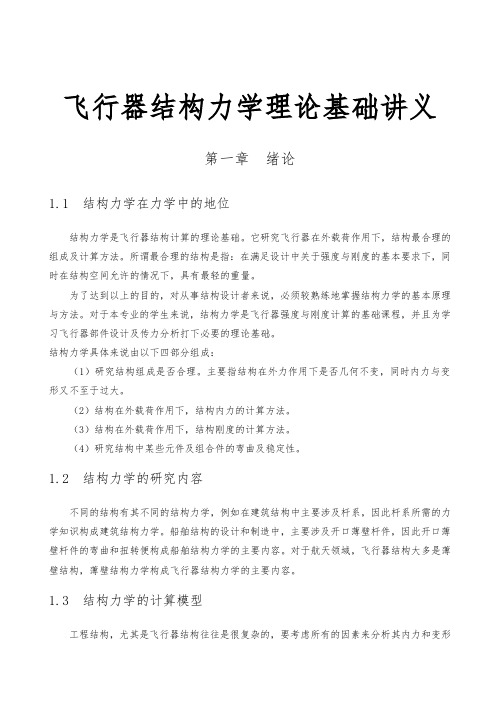
飞行器结构力学理论基础讲义第一章绪论1.1 结构力学在力学中的地位结构力学是飞行器结构计算的理论基础。
它研究飞行器在外载荷作用下,结构最合理的组成及计算方法。
所谓最合理的结构是指:在满足设计中关于强度与刚度的基本要求下,同时在结构空间允许的情况下,具有最轻的重量。
为了达到以上的目的,对从事结构设计者来说,必须较熟练地掌握结构力学的基本原理与方法。
对于本专业的学生来说,结构力学是飞行器强度与刚度计算的基础课程,并且为学习飞行器部件设计及传力分析打下必要的理论基础。
结构力学具体来说由以下四部分组成:(1)研究结构组成是否合理。
主要指结构在外力作用下是否几何不变,同时内力与变形又不至于过大。
(2)结构在外载荷作用下,结构内力的计算方法。
(3)结构在外载荷作用下,结构刚度的计算方法。
(4)研究结构中某些元件及组合件的弯曲及稳定性。
1.2 结构力学的研究内容不同的结构有其不同的结构力学,例如在建筑结构中主要涉及杆系,因此杆系所需的力学知识构成建筑结构力学。
船舶结构的设计和制造中,主要涉及开口薄壁杆件,因此开口薄壁杆件的弯曲和扭转便构成船舶结构力学的主要内容。
对于航天领域,飞行器结构大多是薄壁结构,薄壁结构力学构成飞行器结构力学的主要内容。
1.3 结构力学的计算模型工程结构,尤其是飞行器结构往往是很复杂的,要考虑所有的因素来分析其内力和变形几乎是不可能的,也是没有必要的。
为了适应实际计算,首先需要将真实的结构加以简化,保留起主要作用的因素,略去次要因素,用理想化的受力系统代替实际结构,以得到所需要的计算模型。
计算模型选取的原则是:(1)反映实际结构的主要受力和变形特征;(2)便于结构的力学分析。
计算模型的简化大致可分成以下5个方面的内容。
1.外载荷的简化(1)略去对强度和刚度影响不大的外载荷,着重考虑起主要作用的外载荷。
(2)将作用面积很小的分布载荷简化成集中载荷。
(3)将载荷集度变化不大的分布载荷简化成均布载荷。
飞行器结构学.
单面翼受载示意图
6.2 翼面结构型式
6.2.1 蒙皮骨架式翼面 材料沿四周分布,强度、刚度高,重 量轻,被广泛应用在各种飞行器上。 (1) 单梁式翼面(图6.2.1)
单梁式翼面
1 翼梁
2 前墙 3 翼肋 4 桁条 5 蒙皮 7 辅助接头 8 主接头 图6.2.1 单梁式翼面
6 后墙
单梁式翼面特点
第六章
翼面的构造与设计
6.1 概
述
• 导弹的翼面:各种空气动力面,如弹翼、安定面 (尾翼、反安定面)、操纵面(舵面、副翼)是导弹弹 体的重要组成部分。 • 弹翼的功用:产生升力,以支持导弹在飞行中的 重力和机动飞行所需的法向力。 • 安定面:常指尾翼和反安定面,用以保证导弹的 纵向飞行稳定性。
Q-剪力 M-弯矩 T-扭矩 (a)作用于弹翼的分布载荷及集中载荷 (b)作用于弹翼的剪、弯、扭作用力
6.2.3 夹层结构弹翼
夹层结构弹翼的特点: • 抗弯能力较大,耐热绝热性好,气动外形 好,装配工艺性好。 • 制造工艺较复杂,工艺质量不稳定,特别 是接头和分段处加工制造更困难。 • 夹层结构上不宜开舱件组成 的。 2. 翼梁是沿翼面最大厚度线布置的,这种布置能使 梁具有最大的剖面高度,且沿翼展展向按直线变 化,在强度和刚度上都有利。 3. 翼肋是顺气流方向排列的,翼肋的间距影响屏格 蒙皮的横向变形,普通翼肋的间距约为250~300 mm。 4. 一个能传弯的主接头和两个不能传弯但能传剪的 辅助接头。
图6.2.6 辐射网格式加强筋整体结构弹翼
(3)菱形网格式加强筋整体结构弹翼
如图6.2.7所示
1. 2. 上、下壁板上有菱形网格的加强筋。 壁板的前缘与后缘起着纵墙的作用,壁板的根部组成加 强根肋,根肋上有14对托板螺帽构成弹翼的分散传力式 接头。
飞行器结构动力学_第1章
(1-3) (1-4)
1.2 工程振动的表示方法
复振动表示简谐过程,可使许多振动问题的分析或运 算得到简化。
位移 速度
x(t) Xe jωt
dx jω Xe jωt Ve jωt dt π j 2 V jω X ω Xe
• 较抽象,自动消除约束,对复杂、连续系统较常用
• 实验方法:可检验理论的正确性
第 1章 概 论
结构动力学建模
• 分析模型: – 1)连续系统模型;2)离散系统模型。 – 模型复杂度决定因素:系统特性,计算能力、计算成本 • 最基本的物理量 – 质量(储存动能,产生惯性力) – 刚度(储藏势能,提供恢复力) – 阻尼(消耗能量,产生阻尼力) • 分析工具 – 核心问题是运动方程的求解 – 有限元方法(离散化,近似解,绝大多数问题由于复杂 程度,无法得到解析解,必须求助于数值解) – NASTRAN,ANSYS,Abaqus
n 1
(1-10)
幅值谱
其中
(n 1, 2, 3, ...)
相位谱
(1-11)
周期振动过程可视为频率顺次为基频ω1 及其整数倍的若干或
无数简谐振动分量的合成振动过程。
依据n =1, 2, 3,…各阶分量依次称为基频分量、二倍频分量、三
倍频分量等。基频分量有时称为基波,n倍频分量称为n次谐波。
第 1章 概 论
结构动力学研究内容
激励 输入 系统 输出 响应
• 研究对象-系统,它表征系统本身振动特性 • 响应:系统对输入的输出。 • 振动设计:已知输入,设计系统的输出特性,使其满 足一定要求。 • 系统识别:输入与输出已知,研究系统的特性。 • 环境预测:已知系统特性和输出,研究输入。 • 飞行器结构动力学/振动介绍飞行器等结构振动分析 的基本理论和方法,是飞行器设计,固体力学等专业 的必修课之一。
《飞机结构力学》课件
飞机结构力学的基本原理
材料力学
研究飞机材料的力学性能,包括 材料的弹性、塑性、强度和疲劳
等特性。
结构分析
对飞机结构进行静力学和动力学分 析,确定结构的承载能力和稳定性 。
有限元分析
利用有限元方法对飞机结构进行离 散化分析,通过数值计算得到结构 的应力、应变和位移等结果。
《飞机结构力学》PPT课件
目录
• 飞机结构力学概述 • 飞机结构分析 • 飞机结构材料力学性能 • 飞机结构设计方法 • 飞机结构力学的未来发展
01
飞机结构力学概述
飞机结构力学的定义与重要性
01
飞机结构力学是研究飞机结构的 强度、刚度和稳定性的一门学科 ,是航空航天领域的重要基础学 科之一。
02
飞机结构力学的应用领域
飞机设计
在飞机设计阶段,结构力学需要 考虑飞机的气动外形、载荷分布 、材料选择等因素,以确保飞机 的安全性和性能。
飞机制造
在飞机制造阶段,结构力学可用 于指导制造工艺、确定制造过程 中的关键技术参数和质量控制标 准。
飞机维护
在飞机维护阶段,结构力学可用 于评估飞机的损伤和老化情况, 制定维修计划和方案,确保飞机 的安全运行。
尺寸优化
多学科优化
通过调整结构中各个部件的尺寸参数,以 达到优化结构性能和减轻重量的目的。
综合考虑飞机结构设计的多个学科因素, 如结构、气动、热、控制等,进行多学科 协同优化设计。
飞机结构设计的验证与评估
试验验证
通过物理试验和仿真试验对飞机结构进行验 证,以评估其性能和安全性。
损伤容限评估
评估飞机结构的损伤容限,研究其在损伤情 况下的剩余强度和稳定性。
西北工业大学飞行器结构力学电子教案5-6分析
w z dz (ax by c) z d
不一定符合平面分布。如原来是平面的剖面,变形后发生翘曲, 变形后的剖面不一定再是平面,但其沿母线投影仍是平面的。
▄ 简化假设
显然,满足以上简化假设的薄壁结构,其纤维可以自由伸缩, 剖面可以自由翘曲——称为自由弯曲和自由扭转。 注意,工程梁理论不适用于下列情形: (1)小展翼型机翼如三角型机翼。沿纵向(z向)其剖面变化剧 烈,不符合简化假设(1)要求的棱柱壳体。 (2)长直机翼的根部。不符合简化假设(4)。 (3)开口区附近。不符合简化假设(4)。 (4)材料性质沿纵向不连续。不符合简化假设(4)。 工程梁理论研究的是自由弯曲和自由扭转下薄壁结构的受 力和变形分析,这也是本章的重点内容。
x0
Ax A
i i
i
y0
Ay A
i i
i
相应于形心坐标轴的剖面惯性矩、惯性积和剖面总面积由下列各式确定:
J x Ai y i
2
J y Ai x i
2
进一步可以求出形心主惯性轴x’oy’:
J xy Ai xi y i F0 Ai
tg 2
2 2 J xy
翼肋的构造
典型的机翼布局
典型的机身布局
在飞行器构造中经常遇到梁 式薄壁结构,如长直机翼、后 掠机翼的中外翼、机身等。对 于这类薄壁结构,在已知外载 荷作用下各剖面的总内力(弯矩、 扭矩、轴力和剪力)是静定的, 但若要进一步求出各个元件(桁 条、蒙皮等)的内力,由于这种 梁式长直机翼 具有多桁条的结构是高度静不定 的,要用力法求解就必须借助于电子计算机。倘若蒙皮较厚, 能同时承受正应力和剪应力,此时可以把结构看作是有无穷多 桁条排列着,因而静不定次数是无穷的,用力法来解不可能, 而必须采用有限元素法或能量法,但那也非常麻烦。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例4-1 求解图所示静不定桁架的内 力,已知桁架水平杆及垂直杆的截 面面积均为A,斜杆的断面面积 为 2A,各杆子的材料相同。
解 (1) 分析静不定次数。结构具有4个自由结点,有8个自由度, 而杆子数目为10,相当于10个约束。故 f = 2。 (2) 选取基本系统。 选杆2-4及杆 3-5的轴力为多余约束力,切断杆 2-4及杆3-5的静定系统为基本系 统。求出<P>状态和单位状态<1>、 <2>的内力图。
所谓静不定结构是指:具有多余约束的几何不变体。 或 f > 0 的几何不变体。
所谓多余约束是指:去掉该约束后,不会改变原结构 的几何不变性。
从静不定结构的运动学上:
结构的自由度数 N
< 结构的约束数 C
从静不定结构的 静力学上:
独立的静力平衡方程数目N < 未知力的数目C
通常,将多余约束(多余未知力)的数目称为结构的静 不定次数或静不定度。
移呢?
静定结构的 内力和位移 计算方法
静不定结构中各元件的内力
SiR
静不定结构
当 X1 和 X2 为已知时, 静不定结 构中各元件的内力便可以用叠加 原理,通过下式求出:
SiR SiP Si1 X1 Si2 X 2
问题关键是: 如何确定 X1 和 X2 呢?
4.2 力法基本原理与力法正则方程
1 2
24 2P 55
1 2
21 55
P
其它各杆的轴向力均可如上法求出, 最后绘制内力图。
例4-2 求图示刚架的内力。刚架几何形 状、截面惯性矩、载荷及约束情况均如 图示。
解 (1) 分析刚架的静不定次数。外部约 束多余2个,故 f = 2。
(2) 选取基本系统。 选1点处的两个支座 反力为多余约束力,去掉1点的支座的系 统为基本系统。求出<P>状态和单位状 态<1>、<2>的内力图。
(3) 计算位移影响系数,可利用图形互乘法。
11
a3 6EJ1
a3 EJ1
7a3 6EJ1
12
21
a3 2EJ1
53Pa3 1P 96EJ1
Pa3 2P 4EJ1
22
a3 3EJ1
(4) 建立力法正则方程,并解之。
7 6
X1
1 2
X
2
53 96
P
0
1 2
X1
1 3
X
2
1 4
P
0
17 X1 40 P
力单独作用下产生在用下外的的载效内荷应力作之和。
分解为三
个力状态
的叠加
SiR
=
SiR
=
< R >状态 外载荷在基 本系统上引 起的内力
未知力X1 在 基本系统上 引起的内力
未知力X2 在 基本系统上 引起的内力
SiP
+
SiX1
+
SiX 2
< P >状态
< X 1 >状态
< X 2 >状态
由叠加原理:一线弹性体在诸外力作用下产生的效应等于每个 力单独作用下产生的效应之和。
建立补 充方程
4.2 力法基本原理与力法正则方程
本节将通过一个2次静 不定结构的例子,说 明力法基本原理和力
法正则方程。
4.2 力法基本原理与力法正则方程
对于具有2个多余约 束的静不定结构。
静不定结构
选取1处的2个约束为多余约束,解除 之,代之以约束力。
注 意:
1、解除多余 约束,不是简 单地将约束去 掉,而必须用 相应的约束力 来代替。
由线性代数的知识可知: 当方程的数目小于未知量的数目时,满足这组方程
的未知量的解有无穷多组。
因此,对于静不定结构:
在满足静力平衡方程的无穷多组解中,只有其中一 组解是真实的,这组解必须同时满足变形协调方程。
换句话讲,仅满足静力平衡方程的解,不一定是静 不定结构的真实内力解。
只有满足静力平衡条件,同时又满足变形协调条件 的内力,才是静不定结构的真正的内力。
外载荷或< P >状态
Δ iP δi j
外载荷在第 i 个位移方向上引起的位移。
所求位移的第位2个置下1和、标方表δ向示i i载>荷0作用位置; 第1个2下、标δ表i示j =所δ求j位i 移位置。
单位力 ( i ≠ j )
第 j 个单位力在第 i 个位移方向上引起的位移。
所求位移的位置和方向
一般地,对于一个 n 次静不定结构:
在切口X1和X2方 切口将X1<和XX12>方状态和切 < X口2 X>1状和X2方
向的相对位移为 向的态相的对位位移移,分别向用的单相位对状位移
Δ1P和Δ2P 。
为δ11态和<δ211 。>和单位状为态δ1<2和2 δ>22 。
Δ11 11 X1 Δ21 的 21位X1移Δ来12 表 示12 X。2 Δ 22 22 X 2
X2
9 80
P
(5) 利用叠加原理求刚架内力,内力可按 下式计算,
M A M p M1X1 M2X2
例如,刚架中点A、2、3处的弯矩分别为
M
A
0
17 40
P
a 2
9P 80
0
17 80
Pa
Pa 17
9P
3
M2
2
P a 0 Pa
40
80 40
M3
Pa 2
17 40
Pa
9P 80
a
3 80
根据结构几何组成分析,正确判断多余约束数——静不定次 数。
解除多余约束,转化为静定的基本系统。多余约束代以多余 未知力——基本未知力。
分析基本系统在单位基本未知力和外界因素作用下的位移, 建立位移协调条件——力法典型方程或正则方程。
从典型方程解得基本未知力,由叠加原理获得结构内力。静 不定结构分析通过转化为静定结构获得了解决。
4.2 力法基本原理与力法正则方程
对于具有2个多余约 束的静不定结构。
静不定结构
选取1处的2个约束为多余约束,解除 之,代之以约束力。
注 意:
2、约束力必 须是成对的出 现,且大小相 等、方向相反。 这样的一对约 束力构成一对 自平衡力系。
4.2
力法基本原理与力法正则方程 与原静不定
对于具有2个多余约 结解构除相多余比约较束后,,
P
静不定结构
转化为
1 X1 X2
X1 和 X2 应满足1点处的变形协
调条件:Δ1 = 0, Δ2 = 0
分别求出< P > 、< X 1 >、 < X 2 >三个状态在1处的位移值:
< P>
<X1>
<X2>
外力单独作用在 X1 单独作用在
基本系统上,在 基本系统上,
切口X意须尽欢,莫使金樽空对月。05:39:5605:39:5605:3910/22/2020 5:39:56 AM
•
安全象只弓,不拉它就松,要想保安 全,常 把弓弦 绷。20.10.2205:39:5605:39Oc t-2022- Oct-20
•
加强交通建设管理,确保工程建设质 量。05:39:5605:39:5605:39Thursday, October 22, 2020
将已知外力和多 余未知力作用在
束的静不定结构。 差原别静在不定哪结里构转? 基本系统上。
化成静定的。
P
静不定结构
X1
解除多余约束后的结构,
X2
称之为基静本不系定统结构的基本X1 和X2 应满足
系统或或基基本本结结构构。
约束处的
变形协调条件
由叠加原理:一线静 不弹定性结体构在诸外力作用下产生的效应等于每个
4.3 静不定结构内力计算
(1) 准确判断系统的静不定次数 f ; (2) 选取并解除多余约束(即选取基本系统),分别求出< P >状
态和各单位状态< i >内力,并作出各自的内力图; (3) 利用单位载荷法求位移影响系数; (4) 建立力法正则方程,并解此方程,首先求出多余未知力; (5) 利用叠加原理求出结构真实内力,并绘制内力图。 (6) 对计算结果进行校核。对计算结果除需进行力的校核外,
Pa
最后绘制内力图。
轴力图和剪力图也可以按下式计算,具体计算从略。
N NP N1X1 N2 X 2 Q QP Q1X 2 Q2 X 2
从静不定问题转化为静定问题,多余约束的选取不 是唯一的,因此力法求解的基本系统也不是唯一的。
例如:对于图示的两次静不定刚架,可以选取不同的 多余约束,形成不同的基本系统。
•
安全在于心细,事故出在麻痹。20.10.2220.10.2205:39:5605:39:56October 22, 2020
< 2 >状态
X 1 =1时,在 基本系统上 引起的内力
X 2 =1时,在 基本系统上 引起的内力
SiR SiP + Si1 X1 + Si2 X 2
< P > 状态和< 1 >状态、 < 2 >状态的内力求解:
P
SiP
Si1
Si2
< P >状态
< 1 >状态 1
< 2 >状态 1
如何求这三个状 态下的内力和位
δii = <i> ×<i> δij = <i> ×<j>
= δji ΔiP =<i>×<P>
解此正则方程,求出多余未知力X1、X2、……Xn。