机电研102-基于51单片机的红外遥控电动机转速控制
基于51单片机的直流电机调速的方法
基于51单片机的直流电机调速的方法田云 史洁 黑龙江农业经济职业学院机电工程系 1570410 引言许多单片机爱好者,在设计一些单片机控制系统的时候,都会采用小型直流电动机来制作各种各样的电子设备,因为直流电机调速范围广,易于平滑调速,启动、制动和过载转矩大,易于控制,可靠性较高。
对于直流电机的控制,无非是控制其转向,以及速度。
转向的控制方法比较简单,只要改变电机的通电极性就可改变其旋转方向。
在这里,我们重点讨论如何对其速度上的控制,对其调速可以采用多种办法。
对于直流电机转速的调节,最常用的办法是通过改变电枢端的电压来实现,传统的思路是通过调节电枢电路电阻R 的阻值来改变端电压,以达到调速的目的。
但由于接入的电阻消耗了部分电压,因此这种传统的调速方法效率很低。
随着电力电子技术的发展,出现了许多新的电枢电压控制方法,其中PWM(Pulse Width Modulation)控制是常用的一种调速方法。
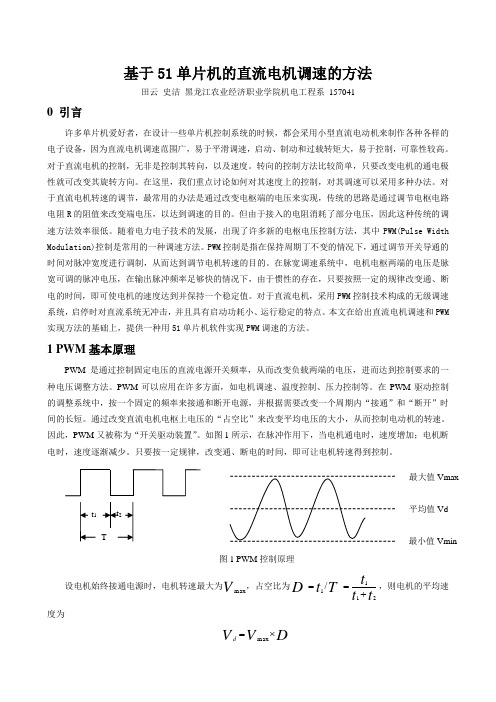
PWM 控制是指在保持周期丁不变的情况下,通过调节开关导通的时间对脉冲宽度进行调制,从而达到调节电机转速的目的。
在脉宽调速系统中,电机电枢两端的电压是脉宽可调的脉冲电压,在输出脉冲频率足够快的情况下,由于惯性的存在,只要按照一定的规律改变通、断电的时间,即可使电机的速度达到并保持一个稳定值。
对于直流电机,采用PWM 控制技术构成的无级调速系统,启停时对直流系统无冲击,并且具有启动功耗小、运行稳定的特点。
本文在给出直流电机调速和PWM 实现方法的基础上,提供一种用51单片机软件实现PWM 调速的方法。
1 PWM 基本原理PWM 是通过控制固定电压的直流电源开关频率,从而改变负载两端的电压,进而达到控制要求的一种电压调整方法。
PWM 可以应用在许多方面,如电机调速、温度控制、压力控制等。
在PWM 驱动控制的调整系统中,按一个固定的频率来接通和断开电源,并根据需要改变一个周期内“接通”和“断开”时间的长短。
通过改变直流电机电枢上电压的“占空比”来改变平均电压的大小,从而控制电动机的转速。
基于51单片机红外无线遥控智能小车控制设计

基于51单片机红外无线遥控智能小车控制设计摘要:本文利用51单片机设计了一款具有红外无线遥控功能的智能小车控制系统。
该系统基于红外技术,实现了对智能小车的远程控制。
通过建立遥控信号传输模型和小车控制模块,实现了智能小车的实时运动控制,包括前进、后退、左转、右转等操作。
本文详细介绍了系统设计方案、硬件设计和软件设计,通过实验验证,证明该系统能够稳定地实现智能小车的远程控制,具有一定的应用价值和推广前景。
关键词:51单片机;红外无线遥控;智能小车控制;遥控信号传输模型Abstract:In this paper, a smart car control system with infrared wireless remote control function based on 51 single-chip microcomputer is designed. The system is based on infrared technology, which realizes the remote control of the smart car. By establishing the remote control signal transmission model and the car control module, real-time motion control of the smart car, including forward, backward, turning left and turning right, is realized. This paper introduces the system design scheme, hardware design and software design in detail. Through experiments, it is proved that the system can stably realize the remote control of the smart car, and has certain application value and promotion prospects.Keywords:51 single-chip microcomputer; infrared wireless remote control; smart car control; remote control signaltransmission model1. 引言智能小车控制系统是一种目前比较受关注的智能化系统,在智能出行和智慧交通中有着广泛的应用。
基于51单片机的红外遥控课程设计

目录第一章设计简介 (2)第二章系统方案 (2)一、设计方案对比 (2)二、方案设计 (4)第三章硬件设计 (4)一、红外遥控器 (4)二、红外接收模块部分 (6)第四章软件设计 (7)一、红外遥控器软件设计 (7)二、红外接收模块软件设计 (10)三、程序代码 (10)第五章测试及分析 (10)第六章结论 (10)第七章参考文献 (11)附录一(程序代码): (12)第一章设计简介本设计分为红外遥控器与红外接收模块两部分。
红外遥控器包括矩阵键盘、增强型51单片机(STC11L04E)、红外发射电路组成。
单片机扫描矩阵键盘后,将按键状态进行信源编码与信道编码,载波(38k脉冲)后由红外发射器发射。
红外接收模块部分由传统51单片机、数码管、一体化红外接收头组成。
一体化红外接收头将信号进行限幅放大、带通滤波、解调、积分、整形后输出解调信号至单片机,并由单片机输出解调信号。
第二章系统方案一、设计方案对比红外遥控器部分2.1.1 主控芯片方案一:HT6222方案二:STC11L04E分析:传统红外遥控器芯片HT6222具有性价比高、功能强大、稳定可靠、使用简单等特点,但该芯片难以零购。
STC11L04E为增强型51单片机,控制灵活(载波频率可调、通信协议可变更、用户码可变换)、价格较HT6222稍贵。
STC11L04E最大的特别是低功耗,功作电压低3.3V,易于应用于移动设备。
结论:由于STC11L04E单片机的灵活性以及学习性(可增强我们对一个完整通信系统的理解)。
因此我们采用方案二。
2.1.2 矩阵键盘方案一:3*6*2.5 贴片轻触开关方案二:6*6*6 直插轻触开关分析:3*6*2.5贴片轻触开关虽然体积小巧、美观,但与6*6*6直插轻触开关对比,在制板布线上较繁锁。
结论:综上,我们采用6*6*6直插轻触开关,使得整体布线简单,可布单面版,简化制板流程。
2.1.3电源模块方案一:钮扣电池CR2032方案二:可充电锂电池18650分析:可充电锂电池18650容量大,节能环保(可多次利用),但体积大。
基于单片机的红外遥感电机控制

基于单片机的红外遥感电机控制卢进军【摘要】Introduced a kind of AT89S52 devices based on single chip through infrared remote control technology to step motor design of the action. System USES modular design, divided into remote transmitters, integration by receiving head of infrared remote sensing of part and motor drive, composed of motor stepping motor parts and by four leds indicator of part Through the infrared remote control to control the step motor sports, and by leds to indicate the step motor running. The design of the system of the work principle, the hardware circuit and software were reviewed in this paper. The whole system design of simple structure, stable performance, reliable, and is easy to operate, expandability etc.%介绍一种基于单片机AT89S52的通过红外遥技术来控步进电机动作的设计.系统采用模块化设计,分为由遥控发射器、一体化接收头组成的红外遥感部分和电机驱动、电机组成的步进电机部分以及由4个发光二极管组成的指示灯部分.通过红外遥控器来控制步进电机的运动,并由发光二极管来指示步进电机的运行状态.对该系统的工作原理、硬件电路和软件方面进行了阐述.该设计整个系统结构简单、性能稳定、工作可靠,具有操作方便、扩展性强等特点.【期刊名称】《电子设计工程》【年(卷),期】2013(021)004【总页数】4页(P110-112,115)【关键词】红外遥控;AT89S52;步进电机;单片机【作者】卢进军【作者单位】陕西理工学院物理与电信工程学院,陕西汉中723001【正文语种】中文【中图分类】TP79在生活和生产上,很多的机械方面都应用到步进电机,例如洗衣机的滚筒、智能小车、数控机床、机器人等等。
基于51单片机的电动机调速系统的设计与实现

基于51单片机的电动机调速系统的设计与实现摘要本文针对市场上电动机调速系统普遍存在的价格高、功能单一等问题,以51单片机为核心,设计了一种低成本、功能强大的电动机调速系统。
该系统主要包括直流电机、电机驱动模块、转速检测模块、51单片机控制模块、人机交互模块等组成。
通过对转速检测模块和电机驱动模块的分析和设计,实现了对电机的准确控制和调速功能。
通过人机交互模块,用户可以方便地对电机进行操作和监测。
实验结果表明,该系统具有性能稳定、可靠性高、调速精度高等优点,是一种较为理想的电动机调速系统设计。
关键词:51单片机;电动机;调速系统;人机交互AbstractIn view of the problems of high price and single function of the electric motor speed control system in the market, this paper designs a low-cost and powerful electric motor speed control system based on 51 single-chip microcomputer. The system mainly consists of DC motor, motor drive module, speed detection module, 51 single-chip microcomputer control module, human-computer interaction module and so on. By analyzing and designing the speed detection module and motor drive module, the accurate control and speed regulation of the motor are realized. Through the human-computer interaction module, users can conveniently operate and monitor the motor. Experimental results show that the system has the advantages of stable performance, high reliability and high speed regulation accuracy, and is anideal electric motor speed control system design.Keywords: 51 single-chip microcomputer; electric motor; speed control system; human-computer interaction.一、绪论在现代工业生产中,电动机是最常用的动力源之一,其在驱动生产线、机械设备等方面都起到着不可或缺的作用。
基于红外遥控的电机控制系统
基于红外遥控的电机控制系统设计与实现学院名称: 电气信息工程学院专 业: 电子信息工程班 级:姓 名:指导教师姓名:指导教师职称: 教 授2011 年 6月JIANGSU TEACHERS UNIVERSITY OF TECHNOLOGY 本科毕业设计(论文)基于红外遥控的电机控制系统设计与实现摘要:本文介绍了基于红外遥控电机控制系统的设计,讲述了直流电机调速的相关知识以及PWM调速的基本原理和实现方法。
直流电机具有优良的调速特性,调速平滑,方便,调速范围广,过载能力大,能承受频繁的冲击负载,可实现频繁的快速启动、制动和反转;能满足生产过程中自动化系统各种不同的特殊运行要求。
电机控制系统采用红外遥控控制是电气传动的发展方向之一。
采用红外遥控控制后,整个电机系统体积小、结构简单、可靠性高、操作维护方便,电动机稳态运转时转速精度可达到较高水平。
本设计方案基于市场的需求,结合红外遥控设计简单,操作方便,成本低廉等特点,采用了51单片机作为遥控发射接收芯片,VS1838B作为红外一体化接收发射管,在此基础上设计了一个简单的红外遥控直流电机系统。
本设计实现了直流电机的几项基本能:启动、停止、加速、减速、正转、反转。
关键词:PWM;直流电机调速;红外遥控Design and realization of motor control system basedon infrared remote controlAbstract:This article introduced the motor control system design based on the infrared remote control, narrated the related knowledge about direct current machine velocity modulation as well as the methods of PWM velocity modulation's basic principle and realization. The direct current machine has the fine velocity modulation characteristic and the velocity modulation is smooth, convenient, and the governor deflection is broad, and the overload capacity is big. It can withstand the frequent shock load and realize the frequent fast start, the brake and the reverse. It can satisfy each kind of different special movement request. in the production process and the automated system. The motor control system uses the infrared remote control control is one of electric drive development directions. After using the infrared remote control control, the entire electrical machinery system volume is small, and the structure is simple, and the reliability is high and the operation maintenance is convenient.The rotational speed precision may achieve the high level when the electric motor run quietly.This design plan based on the market demand. Because the characteristics of infrared remote control design is simple, ease of operation, cost inexpensive and so on, this design used 51 monolithic integrated circuits as the remote control transmitter and receiver devices. This design used VS1838B as the integrated infrared receiving tube, on this base, I have designed a simple infrared remote control system of DC motor. This design enables DC motor of the several basic energy: start, stop, speed up, slow down, forward, reverse.Keywords:PWM; Direct current machine velocity modulation; Infrared remote control目录前言 (1)第1章设计任务与要求 (2)1.1设计任务 (2)1.2设计要求 (2)1.3 技术指标 (2)第2章总体方案设计 (3)2.1设计任务分析及系统总体设计框图的形成 (3)2.2方案选择 (3)2.2.1单片机的选择 (3)2.2.2红外接收模块的选择 (4)2.2.3电机驱动模块的选择 (4)2.3总体方案设计 (4)第3章系统硬件设计 (6)3.1电源电路 (6)3.2红外发射电路 (9)3.3单片机控制电路 (10)3.3.1 STC89C52芯片 (10)3.3.2 单片机最小系统 (11)3.4电机驱动电路 (14)3.5系统总原理图及分析 (14)3.5.1系统总原理图 (15)3.5.2 系统原理析 (16)第4章系统软件设计 (17)4.1PWM调速原理 (17)4.2软件设计流程图 (18)4.2.1 主程序流程图 (18)4.2.2 红外接收 (19)4.3红外遥控的程序设计 (18)4.3.1 遥控发射 (18)4.3.2 红外接收 (18)第5章系统调试 (23)5.1调试仪器 (23)5.2调试步骤 (23)5.2.1通电前的检查 (23)5.2.2直流电机的调速功能仿真图形 (23)总结 (26)参考文献 (27)致谢 (28)附录 (29)附录一:基于红外遥控的电机控制的设计原理图 (29)附录二:程序清单 (30)附录三:英文资料翻译 (40)前言随着科技的发展,人们的生活节奏也越来越快,随之人们对方便、快捷的要求也随之不断增高。
基于单片机的红外遥感电机控制
(完整版)基于51单片机的红外遥控器解码设计毕业论文
第1章红外解码系统分析第1节设计要求整个控制系统的设计要求:被控设备的控制实时反应,从接收信号到信号处理及对设备控制反映时间应小于1s;整个系统的抗干扰能力强,防止误动作;整个系统的安装、操作简单,维护方便;成本低。
红外载波、编码电路设计要求:单片机定时器精确产生38KHz红外载波;根据控制系统要求能对红外控制指令信号精确编码并迅速发送。
红外解码电路设计要求:精确接收红外信号,并对所接收信号进行解码、放大、整形、解调等处理,最后输出TTL电平信号;对非红外光及边缘红外光抗干扰能力强。
设备扩展模块设计要求:直流控制交流;抗干扰能力强;反应迅速不产生误动作;能承受大电流冲击。
第2节总体设计方案2.1 方案论证驱动与开关方案一:采用晶闸管直接驱动。
其优点是体积小,电路简单,外围元件少。
但控制电流小,大电流晶闸管成本高,并且隔离性能差。
方案二:采用三极管驱动继电器。
其体积大,外围元件多。
优点是控制电流大,隔离性能好。
根据实际情况,拟采用方案二。
2.2 总体设计框图经过上述方案的分析选择,得出系统硬件由以下几部分组成:电视红外遥控器,51单片机最小系统,接收放大于一体集成红外接收头,1602液晶显示驱动电路。
整体设计思路为:根据扫描到不同的按键值转至相对应的ROM表读取数据。
确认设备及菜单选择键后AT89S2将从ROM读取出来的值,按照数据处理要求从P2.5输出控制脉冲与T0产生的38KHz的载波(周期是26.3μs)进行调制,经NPN三极管对信号放大驱动红外发光管将控制信号发送出去。
红外数据接收则是采用HS0038一体化红外接收头,内部集成红外接收、数据采集、解码的功能,只要在接收端INT0检测头信号低电平的到来,就可完成对整个串行的信号进行分析得出当前控制指令的功能。
然后根据所得的指令去操作相应的用电器件工作,如图1-1所示。
图1-1 电路设计整体框图第2章红外解码硬件电路设计第1节单片机及其硬件电路设计1.1 单片机的介绍AT89S52是一种低功耗、高性能CMOS8位微控制器,具有8K 在系统可编程Flash 存储器。
基于51系列单片机控制步进电机调速实验
基于51系列单片机控制步进电机调速实验实验目的及要求:1、熟悉步进电机的工作原理2、熟悉51系列单片机的工作原理及调试方法3、设计基于51系列单片机控制的步进电机调速原理图(要求实现电机的速度反馈测量,测量方式:数字测量)4、实现51系列单片机对步进电机的速度控制(步进电机由实验中心提供,具体型号42BYG )由按钮控制步进电机的启动与停止;实现加速、匀速、和减速控制。
速度设定由键盘设定,步进电机的反馈速度由LED数码管显示。
实验原理:步进电机控制原理一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。
步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。
步进电动机的转子为多极分布,定子上嵌有多相星形连接的控制绕组,由专门电源输入电脉冲信号,每输入一个脉冲信号,步进电动机的转子就前进一步。
由于输入的是脉冲信号,输出的角位移是断续的,所以又称为脉冲电动机。
随着数字控制系统的发展,步进电动机的应用将逐渐扩大。
步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定。
步进电机的驱动电路根据控制信号工作,控制信号可以由单片机产生。
电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:(图2所示)图1 是反应式步进电动机结构示意图,它的定子具有均匀分布的六个磁极,磁极上绕有绕组。
红外遥控系统毕业设计基于单片机的红外遥控系统设计
《单片机设计》课程设计题目:基于单片机的红外遥控系统设计专业:电气工程系班级:姓名:学号:指导教师:小组成员:成绩:摘要随着社会的进展、科技的进步和人们生活水平的慢慢提高,各类方便于生活的遥控系统开始进入了人们的生活。
采纳单片机进行遥控系统的应用设计,具有编程灵活多样、操作码个数可随意设定等优势。
由于单片机具有集成度高、体积小、靠得住性高、价钱廉价等优势,其在机电一体化、工业操纵、仪器仪表和家用电器等领域取得了普遍应用。
当前单片机对家用电器操纵呈现出外形简单化、功能多样化、产品智能化的进展趋向。
红外遥控技术具有利用方便、功耗低、抗干扰能力强、价钱廉价的特点,因此它的应用前景十分广漠。
本课题以延伸红外无线遥控技术为目的,提出了一种红外遥控器集中操纵的方案,核心是设计出一个红外接收系统。
本设计以红外线作为传递信息的载体,可对受控对象的工作状态进行短距离无线操纵,适用于遥控工业、医疗、家用电器等设备的开闭状态。
并含有设备计数模块,可对处于工作状态的设备进行计数,并显示出来。
课题的重点在于通过软件实现二进制数据的解码工作,然后通过红外收发头进行数据传输操纵系统。
关键词:红外遥控;单片机操纵;显示模块目录1 引言........................................................................................................................................ - 4 -1.1 课题研究的目的........................................................................................................... - 4 -............................................................................................................................................. - 4 - 2设计任务及要求....................................................................................................................... - 5 -2.1红外遥控系统的设计与实现任务,要紧完成:........................................................ - 5 -2.2 红外遥控系统的设计要求:....................................................................................... - 5 -3 红外遥控系统的硬件设计...................................................................................................... - 6 -3.1 本设计方案思路......................................................................................................... - 6 -3.2 研发方向和技术关键................................................................................................. - 6 - ..................................................................................................................................................... - 7 - ...................................................................................................................................... - 7 -3.3.3 红外接收模块.................................................................................................. - 11 -3.3.4 LED模拟外围设备模块.................................................................................. - 12 -.................................................................................................................................... - 13 - 4 红外遥控系统的软件设计.................................................................................................... - 14 -4.1 主控程序..................................................................................................................... - 14 -4.2 遥控发射部份............................................................................................................. - 14 -4.3 遥控接收处置部份..................................................................................................... - 15 -5 测试结果及分析.................................................................................................................... - 15 -5.1 实验仪与运算机的连接............................................................................................. - 15 -5.2 硬件系统的调试......................................................................................................... - 16 -5.3 软件系统的调试......................................................................................................... - 16 -6 总结与体会............................................................................................................................ - 16 - 参考文献.................................................................................................................................... - 17 - 7附录程序代码....................................................................................................................... - 18 -1 引言1.1 课题研究的目的本设计要紧研究并设计一个基于单片机的红外发射及接收系统,实现对温度操纵、蜂鸣器、LED灯的隔离操纵。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于51单片机的红外遥控电动机转速控制
一 题目来源
根据已有期刊上的一篇论文进行改编自行设计,并将现有的技术应用到敞篷
轿车遮阳窗自动调节实现遮阳的功能。
二 课题要求与目的
单片机具有体积小、速度快、性能可靠和价格低廉等优点,通常在其外部配
置外围电路就可构成一完整的控制系统。红外遥控具有抗干扰能力强响应速度
快,功耗低等众多优。 目前,基于单片机控制的红外遥控技术已广泛应用于家
用电器、智能玩具和工业控制等众多领域,给人们的生产和生活带来极大的方便。
本文设计的以STC-51单片机为核心的红外遥控电机调速系统具有硬件电路简单
成本低廉,软件编写较容易,用电机带动相应的驱动机构后便是一实用性极强的调
速控制系统。
将单片机与红外遥控技术相结合,设计一套红外遥控单相电机调压调速装
置,包括设计发射电路及软件编写,接收器电路及软件编写。另外,电动机转速
设置为7档。
三 课题电路原理设计
1 器件的选型
1) 固态继电器SSR
固态继电器(Solid State Relay,缩写SSR),是由微电子电路,分立电子器
件电力电子功率器件组成的无触点开关。用隔离器件实现了控制端与负载端
的隔离。固态继电器的输入端用微小的控制信号,达到直接驱动大电流负载。
固态继电器是具有隔离功能的无触点电子开关,在开关过程中无机械接
触部件,因此固态继电器除具有与电磁继电器一样的功能外,还具有逻辑电
路兼容,耐振耐机械冲击,安装位置无限制,具有良好的防潮防霉防腐蚀性
能,在防爆和防止臭氧污染方面的性能也极佳,输入功率小,灵敏度高,控
制功率小,电磁兼容性好,噪声低和工作频率高等特点。目前已广泛应用于
计算机外围接口设备,调温、调速、调光、电机控制、电炉加温控制、电力
石化、医疗器械、金融设备、煤碳、仪器仪表、交通信号等领域。
2) 红外接收器NJL41H38
NJL41H38的中心频率为38KHz的一体化红外接收器,有3个引脚,其中
一个脚为TTL电平输出,2脚为地线,3脚为电源端。NJL41H38只能接收调
制成38KHz的信号,并且只响应脉冲调制信号,不响应连续调制信号。脉冲
宽度范围为400µs~20ms。因此,发射端的发射信号必须是脉冲信号。
2 红外遥控发射电路
红外遥控主要包括单片机控制系统、红外发射电路、键盘三个部分。红外线
发射电路将要发射的数字信号调制到38KHZ的载波上,通过红外线发射管发射
出去。电路如图1所示。其中按键S1~S7分别对应电动机的7档调速,P2.0输
出欲发射的调制信号。
图1 红外遥控发射电路原理图
3 接收系统与调速系统
电动机的调压调速是指通过改变加在电动机上的电压来实现的。接收与调速系统
电路如图2所示。
图2 接收与调速电路
单片机的并口P1.7控制固态继电器K的通断,进而控制电动机电源的通断。
在50Hz的正弦交流的半个周期内,如果电动机断电与通电的时间间隔分别为
t1ms与t2ms,则t1+t2=10ms.每当电源电压过零时,单片机产生一个中断,在服
务程序中,控制继电器断开t1ms,再导通t2ms.正半周与负半周一样。对于7个
转速档,t1分别为0ms、2ms 、4ms、5ms、6ms、8ms、10ms.当t1=0ms时电动
机的转速最大,t1=10ms时电动机停止。
过零检测电路由比较器µA741和非门电路组成,用于识别电源电压的的过零
位,保证单片机对电动机电源的控制信号与电动机电源保持同步,即保证每次t
1
的起始时间都在电源刚刚过零点时。当电源电压由正半周到负半周过零时,比较
器由1到0跳变,在外部中断0处产生一次中断申请;而当电源电压由负半周到
正半周过零时,比较器由0到1跳变,经非门电路在外中断1处产生一次中断请
求。
四 单片机选型
MCS51系列单片机是目前国内实用最广泛的一种单片机型,它以其优越的性
能、成熟的技术及高可靠性和高性能价格比,迅速占领了工业控制和自动化工程
应用的主要市场,成为国内单片机应用领域的主流。全球各单片机厂商在MCS51
内核基础上,派生了大量的51内核系列单片机,极大地丰富了MCS51的种群。
其中宏晶科技公司推出了STC89系列单片机,增加了大量的新功能.提高了5l
的性能,是MCS51家族种的佼佼者。
本次设计采用STC89C51单片机。STC89C51系列单片机是MCS5l系列单片机
的派生产品。它们在指令系统、硬件结构和片内资源上与标准8052单片机完全
兼容,12时钟/机器周期和6时钟,机器周期可反复设置。它的主要特点有:
1.增强型6时钟/机器周期,12时钟/机器周期8051CPU;
2.工作电压:5.5v一3.4v(5v单片机);
3.工作频率范围:0一40MHz,相当于普通8051的0一80MHz,实际频率
可达48MHz;
4.用户应用程序空间4K字节;
5.片上集成512字节/1280字节RAM:
6.EEPROM功能;
7.看门狗;
8.共有3个16位定时器,计数器;
9.外部中断2路,下降沿中断或低电平触发中断;
10.通用异步串行口;
11.工作温度范围:-40一+85C;
12.封装:PDIP-40,PLCC-44,PQFP-44。
选用STC单片机的主要理由是可以降低成本、提升性能、原有程序可直接使
用,硬件无需改动。STC89系列单片机内部Flash擦写次数为100000次以上,且
在出厂时就已经完全加密,无法解密。用户程序下载方便,可以直接用STC提供
的下载工具下载程序,也可利用通用编程器。
四 课题软件编程
1 发射器软件编程
1) 发射的脉冲信号
由于发射端的发射信号必须是脉冲信号,故规定占空比为1/4的脉冲用数字
0表示,占空比为3/4的脉冲用数字1表示,每个数字的周期为4ms。
电动机的7档转速对应的发送端的数据采用3位编码方式,如表1所示。
表1 发送端的数据编码
编 码 按 键 功 能
001
1键 1档转速(全速)
010
2键 2档转速
011
3键 3档转速
100
4键 4档转速
101
5键 5档转速
110
6键 6档转速
111
7键 7档转速(停止)
一个数据帧共5位数据,每帧数据的格式为:
起始位0 数据位的低位 数据位的中间未 数据位的高位 终止位1
当发送端无键按下时处于空闲状态,空闲状态时一直发送数字1.一旦有键按
下,便发送一帧数据。
2) 发送端的程序流程图
(a)主程序 (b)显示程序
(c)键盘处理程序 (d)定时器0中断服务程序
图3 发送端的程序流程图
发送端的程序流程图如图3所示。发送端由定时器0定时溢出产生中断,在
中断服务程序中发送数据。中断周期为0.5ms,每4ms即8个定时器溢出周期发
送1位数字。对于数字0,在4ms内通过P2.0输出00000011;对于数字1,在
4ms内通过P2.0输出00111111。1帧数据有5位脉冲数字,因而发送1帧数据
要20ms,共40个定时器溢出周期。
键号存储在片内RAM50H单元,定时器0中断的次数存储在RAM51H单元,
片内RAM20H~RAM24H单元对应的40个可寻址位00H~27H,分别对应40个定时
器0一处周期通过P2.0所输出的数据。可寻址位28H作为有键按下与否的标志
位,该位为0表示没有键按下,此时输出空闲帧状态,可以接受按键;该位为1
时表示正在发生数据帧,不扫描键盘,拒绝接受按键信息,直到当前数据帧发送
完。每发送完数据帧后,将按键标志位28H置0,此时可接受新的按键。
2 接收器软件编程
接收端的程序包括主程序和中断服务程序。
1) 主程序编程
当主程序中检测到P0.1有负跳变,并延时4ms后再检测P0.1,若为0,则
说明接收到信号为0;否则,则说明接收信号为1。如前所述,对应发射端不同
的键按下,约定t1分别取值0ms、2ms 、4ms、5ms、6ms、8ms、10ms。主程
序在“发送3位数据”程序段中,按照这一约定设置20个可寻址位00H~13H控
制t1和 t2的时间数值。流程图如图4所示。
图4 接收端主程序流程图
2) 中断服务程序编程
外部中断是电源过零时向单片机提出的外部中断。在中断服务程序0中完成
如下内容:令定时器0的定时周期为0.5ms。交流电的半周期为10ms,为20次
定时器溢出。定时器每次溢出时设置固态继电器的状态,由20个可寻址位00H~
13H的内容分别表示对应的定时器溢出时的固态继电器的状态。00H~13H的内
容由主程序接收到的有效数据帧设置。中断服务程序1完成与中断服务程序0
完成的内容相同,所以在执行中断服务程序1时,可以直接转到中断服务程序0
中。