单片机红外电视遥控器C51程序代码单片机程序
51单片机红外解码资料+源代码
位地 8FH 8EH 8DH 8CH 8BH 8AH 89H 88H 址
源代码如下: #include<reg52.h> #define uchar unsigned char #define uint unsigned int sbit dula=P2^6; sbit wela=P2^7;
uchar irtime; //红外时间 uchar startflag; //启动接收 uchar irdata[33]; uchar bitnum; uchar irreceiveok; //红外接收完毕 uchar ircode[4]; uchar irprosok; uchar disp[8]; uchar code smg_du[]={
发射器发射的的信号为
接收器接收到的信号为
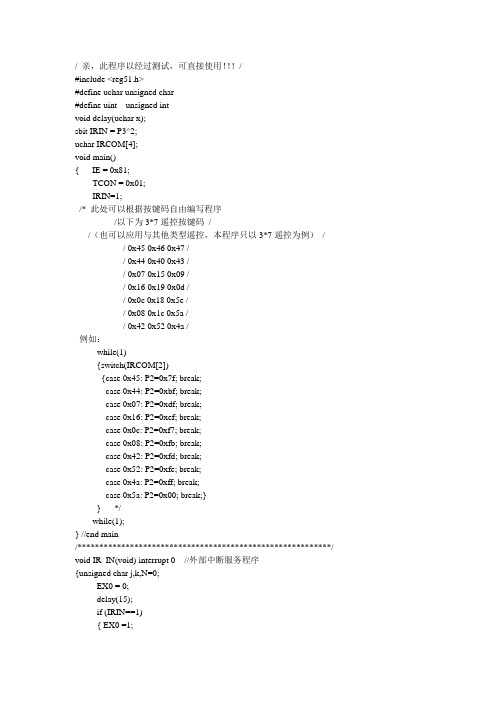
即 9ms 低电平后 4.5ms 高电平作为起始码,之后接受到两次 8 位客户码,一次八位数据码,和一次八位数据反码。
遥控器在按键按下之后周期性的发出同一种 32 位二进制编 码周期约为 108ms,一组码持续时间随本身的“0”“1”个数不同
而不同。大约在 45~63ms 之间,当一个键按下 36ms,振荡器使芯 片激活,将发射一组 108ms 的编码脉冲这 108ms 编码脉冲由一个 起始码(9ms),一个结束码(4.5ms),低八位地址码(9~18ms), 高八位地址码(9~18ms),八位数据码(9~18ms),和这八位数据 码反码(9~18ms),如果按下超过 108ms 仍未松开,接下来发射 的代码(连发代码)将仅有起始码(9ms)和结束码(2.5ms)组 成。
解码的关键是如何识别零和一: “0”和“1”都是以 0.56ms 低电平开始的,不同的是高电平 宽度不同,“0”为 0.56ms“1”为 1.168ms,所以必须根据高电平 宽度来区别“0”和“1”。 如果从 0.56ms 低电平过后,开始延时,0.56ms 后,若读到的 电平为低,说明该位为零,反之则为一,可靠其间,延时必须比 0.56ms'长一些,又不能超过 1.12ms,否则如果该位为零,读到的 已是下一位高电平,因此取(1.12+0.56)/2=0.84ms 最为可靠,一 般取 0.84ms 左右均可。根据码的格式,应该等待 9ms 起始码和 4.5ms 结束码完成后才能读码。 备注:定时器/计数器控制寄存器 TCON 位序 D7 D6 D5 D4 D3 D2 D1 D0 号 位符 TF1 TR1 TF0 IR0 IE1 IT1 IE0 IT0 号
c51、c52单片机红外线遥控接收解码c程序(可直接使用)
/ 亲,此程序以经过测试,可直接使用!!!/#include <reg51.h>#define uchar unsigned char#define uint unsigned intvoid delay(uchar x);sbit IRIN = P3^2;uchar IRCOM[4];void main(){ IE = 0x81;TCON = 0x01;IRIN=1;/* 此处可以根据按键码自由编写程序/以下为3*7遥控按键码//(也可以应用与其他类型遥控,本程序只以3*7遥控为例)/ / 0x45 0x46 0x47 // 0x44 0x40 0x43 // 0x07 0x15 0x09 // 0x16 0x19 0x0d // 0x0c 0x18 0x5e // 0x08 0x1c 0x5a // 0x42 0x52 0x4a /例如:while(1){switch(IRCOM[2]){case 0x45: P2=0x7f; break;case 0x44: P2=0xbf; break;case 0x07: P2=0xdf; break;case 0x16: P2=0xef; break;case 0x0c: P2=0xf7; break;case 0x08: P2=0xfb; break;case 0x42: P2=0xfd; break;case 0x52: P2=0xfe; break;case 0x4a: P2=0xff; break;case 0x5a: P2=0x00; break;}} */while(1);} //end main/**********************************************************/ void IR_IN(void) interrupt 0 //外部中断服务程序{unsigned char j,k,N=0;EX0 = 0;delay(15);if (IRIN==1){ EX0 =1;return;}//确认IR信号出现while (!IRIN) //等IR变为高电平,跳过9ms的前导低电平信号。
基于51单片机的红外遥控编码解码的C语言程序和电路[1]
![基于51单片机的红外遥控编码解码的C语言程序和电路[1]](https://img.taocdn.com/s3/m/223b88fc941ea76e58fa04c3.png)
请勿转载!!!作品功能简介:当学习键按下后,红外接收头便可将接受到的信号存储到单片机中。
在接受到通用遥控器发出的信号后,如果按下发射键,单片机将调出刚刚储存的信息,通过红外发射头发射出和遥控器一样的信号来达到控制的作用。
#include <reg52.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned intsbit studylamp=P2^7;sbit lamp=P2^6;sbit studykey=P3^2;sbit remotein=P1^1;sbit remoteout=P1^0;sbit txkey=P2^0;uint i,j,m=255,n,k,s;uchar idata remotedata[206];uint head;uint remdata;//一毫秒延时程序delay1ms(uint t){for(i=0;i<t;i++)for(i=0;j<120;j++);}//初始化函数clearmen(){studylamp=1;lamp=1;remoteout=0;remotein=1;for(i=0;i<206;i++){remotedata[i]=0x00;}IE=0x00;IP=0x01;TMOD=0x22;PCON=0X00;TH1=0xf3;TL1=0xf3;IT0=1;EX0=1;EA=1;}//键功能函数void key_tx(){if(txkey==0){delay1ms(1);if(txkey==0){while(txkey==0);ET1=1;TR1=1;for(i=head;i>0;i--);remoteout=0;ET1=0;TR1=0;n=0;while(1){lamp=0;studylamp=1;if(remotedata[n]==0x00){delay1ms(10);break;}for(i=remotedata[n];i>0;i--){_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();}n++;ET1=1;TR1=1;for(i=remotedata[n];i>0;i--);remoteout=0;ET1=0;TR1=0;n++;}}}}//主函数void main(){clearmen(); //初始化while(1){key_tx(); //按键扫描}}//40KHz发生器void time_intt1(void) interrupt 3{remoteout=~remoteout;}//外中断0void intt0(void) interrupt 0{ET1=0;TR1=0;EX0=0;EA=0;head=0;while(studykey==0);studylamp=0;lamp=1;while(remotein==1);head=0;while(remotein==0){_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();head++;}n=0;remdata=0x0000;while(1){while(remotein==1){_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();remdata++;}if(remdata>m) //高电平>5毫秒退出 {remotedata[n]=0x00;EX0=1;EA=1;goto end;}remotedata[n]=remdata;n++;remdata=0x0000;while(remotein==0){_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();remdata++;}remotedata[n]=remdata;n++;remdata=0x00;}end: lamp=0;studylamp=0;}电路:实物:2009-06-25 12:39。
51单片机红外遥控程序
unsigned long m,Tc;
unsigned char IrOK;
void delay(uchar i)
{
uchar j,k;
for(j=i;j>0;j--)
for(k=125;k>0;k--);
}
void display()
{
dula=0;
P0=table[show[0]];
MOV R7,#202
DELAY882_A
NOP
NOP
DJNZ R7,DELAY882_A
RET
;=============================1000
DELAY1000 ;1.085x ((229x4)+5)=999.285
MOV R7,#229
DELAY1000_A
NOP
NOP
DJNZ R7,DELAY1000_A
Qq:735491739
红外遥控发射芯片采用PPM编码方式,当发射器按键按下后,将发射一组108ms的编码脉冲。遥控编码脉冲由前导码、8位用户码、8位用户码的反码、8位操作码以及8位操作码的反码组成。通过对用户码的检验,每个遥控器只能控制一个设备动作,这样可以有效地防止多个设备之间的干扰。编码后面还要有编码的反码,用来检验编码接收的正确性,防止误操作,增强系统的可靠性。前导码是一个遥控码的起始部分,由一个9ms的低电平(起始码)和一个4. 5ms的高电平(结果码)组成,作为接受数据的准备脉冲。以脉宽为0. 56ms、周期为1. 12ms的组合表示二进制的“0”;以脉宽为1. 68ms、周期为2. 24ms的组合表示二进制的“1”。如果按键按下超过108ms仍未松开,接下来发射的代码(连发代码)将仅由起始码(9ms)和结束码(2. 5ms)组成。
红外遥控编码原理及C程序,51单片机红外遥控
case 0x19:j=1;//100+
break;
case 0x0d:k=1;//200+
break;
case 0x16:l=1;//0
break;
case 0x0c:m=1;//1
{
temp=temp>>1; //最先读出的是高位数据
dingshiqi();//定时器记高低电平时间,数据码
if((HighTime>300)&&(HighTime<900)) //说明该位是0
temp=temp&0x7f;
if((HighTime>1200)&&(HighTime<2200)) //说明该位是1
uchar code table1[]={"User Code:"};
void delay(uint x)
{
uint i,j;
for(i=x;i>0;i--)//i=xms即延时约xms毫秒
for(j=100;j>0;j--);
}
void write_com(uchar com)
{//写液晶命令函数
{
a=0;b=0;c=0;d=0;
e=0;f=0;g=0;h=0;
i=0;j=0;k=0;l=0;
m=0;n=0;o=0;p=0;
q=0;r=0;s=0;t=0;
u=0;
}
void init_1602()
{//初始化函数
uchar num;
lcden=0;
rs=0;
write_com(0x38);//1602液晶初始化
while(1)
学习型红外线遥控程序——C51
学习型红外线遥控程序——C51学习型红外线遥控程序——C51/*************晶体为11.0592M,波特率9600bps***************学习型红外线遥控程序*******/#include <AT89X51.H>void Ewen(void);void Ewds(void);void Delay(void);void Irda(void);void Study(void);void Output(unsigned int h);void Comput(unsigned char outdata);void Erase(unsigned char Address);unsigned int Read(unsigned char Address);unsigned char Display(unsigned char inAddress);void Write(unsigned char Address,unsigned int InData);unsigned int Both(unsigned char data1,unsigned char data2);unsigned char data e1 _at_ 0x1A; //分别存放红外线译码后的数据unsigned char data w1 _at_ 0x1B;unsigned char data e2 _at_ 0x1C;unsigned char data w2 _at_ 0x1D;sbit IrInput=P3^2; //红外线输入引脚,可自定义sbit Study1=P3^6; //学习按键,可自定义sbit Led2=P2^5; //接收成功、学习成功指示sbit Led1=P2^6; //空闲指示sbit Dout=P2^3; //at93c16--DOsbit Din=P2^2; //at93c16--DIsbit sk=P2^1; //at93c16--SKsbit cs=P2^0; //at93c16--CS/*********************主程序***************************/ void main(void){unsigned int i;SCON = 0x50; //串口方式1,允许接收TMOD = 0x20; //定时器1定时方式2TH1 = 0xFD; //波特率9600TL1 = 0xFD;IT0 = 1; //INT0下降沿有效EX0 = 1; //开INT0中断;TR1 = 1; //启动定时器P2_7=0; //初始化引脚P1=0xff;EA = 1; //允许CPU中断while(1){for (i=0; i<20000; i++){ Led1=1;if(!Study1) Study();}for (i=0; i<20000; i++){ Led1=0;if(!Study1) Study();}}}/***********************串口输出**********************/ void Comput(unsigned char outdata){SBUF = outdata;while(!TI);TI = 0;}/*******************红外线查询子程序*******************/ void Irda(void){#pragma asmMOV R6,#10SB:MOV R4,#19 ;延时880微秒D1:MOV R5,#19DJNZ R5,$DJNZ R4,D1JB P3.2,EXIT ;延时882微秒后判断P3.2脚是为1DJNZ R6, SB ;在8820微秒内如P3.2为1就退出JNB P3.2, $ ;等待高电平避开9毫秒低电平引导脉冲MOV R4,#10 ;延时4740微秒D2: MOV R5,#218DJNZ R5,$DJNZ R4,D2;延时4.74毫秒避开4.5毫秒的结果码MOV R1,#1AH ;设定1AH为起始RAM区MOV R2,#4 ;接收从1AH到1DH,用于存放操作码和操作反码PP:MOV R3,#8 ;每组数据为8位SS:JNB P3.2,$ ;等待地址码第一位的高电平信号MOV R4,#19 ;延时880微秒D5:MOV R5,#19DJNZ R5,$DJNZ R4,D5;高电平开始后882微秒判断信号的高低电平MOV C,P3.2 ;将P3.2引脚此时的电平状态0或1存入C中JNC TT ;如果为0就跳转到TTMOV R4,#2 ;延时1000微秒D6:MOV R5,#248DJNZ R5,$DJNZ R4,D6;检测到高电平1的话延时1毫秒等待脉冲高电平结束TT:MOV A,@R1 ;将R1中地址的给ARRC A ;将C中的值0或1移入A中的最低位MOV @R1,A ;DJNZ R3,SS ;接收满8位换一个内存INC R1 ;对R1中的值加1,换下一个RAMDJNZ R2,PP ;接收完所有数据EXIT:#pragma endasm}。
自己写的51单片机的红外线遥控接收程序(C语言)
//51单片机做的红外遥控实验(C语言)#include<reg51.h>#define u8 unsigned char#define u16 unsigned int#define ID 0x00 //本遥控器的ID号sbit ir=P3^3;code u8 seg[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; //0-9的段码code u8 s[]={1,0x40,0x48,0x04,0x02,0x05,0x54,0x0A,0x1E,0x0E}; u8 buf[4];bit ir_f=0;u8 nu;void delay(u16 x){while(x--);}void show(u16 x){u8 i=0,k=0;u8 s[4];kk:s[i]=x%10;if((x/10)>=1){x=x/10;i++;goto kk;}k=i+1;for(i=0;i<k;i++){P0=seg[s[i]];P2=~(8>>i);delay(300);P0=0XFF;P2=0XFF;}}void timer0_init(){TH0=0;TL0=0;TMOD|=0x01;TR0=0;}u16 low_test(){u16 t;TR0=1;while((ir==0)&&((TH0&0X80)!=0X80));TR0=0;t=TH0;t<<=8;t|=TL0;TH0=0;TL0=0; //t=(TH*256+TL0);//机器周期数return t;}u16 high_test(){u16 t;TR0=1;while((ir==1)&&((TH0&0X80)!=0X80));TR0=0;t=TH0;t<<=8;t|=TL0;TH0=0;TL0=0;return t;}/*u16 time_test(bit x){}*/u8 receive_8bit(){u8 d,i;u16 t;for(i=0;i<8;i++){t=low_test();t=high_test();d>>=1;if((t>=2750)&&(t<=3100)){d|=0x80;}}return d;}void ir_decode(){u16 t;u8 i;if(ir==0)//有遥控信号{t=low_test();//8295-9000us,倍频的是16590-18000if((t>=14500)&&(t<=18000))//检查引导码低电平时间{t=high_test();if((t>=8000)&&(t<=9000))//检查高电平{for(i=0;i<4;i++){buf[i]=receive_8bit();}if(buf[0]==(~buf[1]))//检查系统码是否正确{if(buf[0]==ID){if(buf[2]==(~buf[3])){//具体按键处理ir_f=1; //遥控有效}}}}}}}/*void key(){if(buf[2]==0x40){P1^=(1<<0);}if(buf[2]==0x48){P1^=(1<<1);}}*/void ir_execuse(){if(ir_f==1){switch(buf[2]){case 0x40:P1^=(1<<0);break;case 0x48:P1^=(1<<1);break;case 0x04:P1^=(1<<2);break;case 0x02:P1^=(1<<3);break;case 0x05:P1^=(1<<4);break;case 0x54:P1^=(1<<5);break;case 0x0A:P1^=(1<<6);break;case 0x1E:P1^=(1<<7);break;}ir_f=0;}}void show_d(){u8 j;for(j=0;j<10;j++){if(s[j]==buf[2]){nu=j;break;}}show(nu);}void isr_init(){EA=1;EX1=1;//外部中断,一直看3.3有没有下降沿。
C51红外遥控代码
本程序只适用于本图所显示的遥控器以及stc12c5a60s2的单片机并且晶振是11.0592M的:
使用方法:
软件上将下列.c和.h加入c51工程,在主程序运行前加入红外初始化ini_hw()函数,然后运行程序的时候,如果signal=1,代表接收到按下的按键,用完后注意清零。
读key就是红外按键的值(1,2,3······代表按键依次的按键值),读kr就是按键的键值。
硬件上,把接收头的put接单片机的外部中断的P3^2上。
下面是.h文件
#ifndef _hwcl_h_ //红外处理,用于处理红外键值
#define _hwcl_h_
#include<STC12C5A60S2.H>
#include<intrins.h>
#define I 10
sbit js=P3^2;
#ifndef uchar
#define uchar unsigned char
#endif
#ifndef uint
#define uint unsigned int
#endif
extern uint key,kr; //key和kr都是键值,但kr是红外码二进制转换过来的,而key 是处理过的键值变成如1,2,3
extern uint signal; //当按键检测到时,signal值是1
extern uchar pdata b[40];
extern void ini_hw();
#endif。
STC单片机51简单的红外遥控发射程序C语言
}
void H(){ //红外1; 以低电平0.565ms,高电平1685表示1
uchar j;
for (j=0;j<43;j++) {s1=~s1;Delay13us();} //低电平0.565ms载波,模拟38KHZ
{
uint j;
while(1){
Delay3000ms();
//以下开始发送
for (j=0;j<692;j++) {s1=~s1;Delay13us();}//载波发送9ms的起始码
for (j=0;j<346;j++) {s1=1;Delay13us();} //无载波发送4.5ms的结果码
for (j=0;j<173;j++) {s1=1;Delay13us();} //2.25ms
for (j=0;j<44;j++) {s1=~s1;Delay13us();}//结束位
for (j=0;j<7400;j++) {s1=1;Delay13us();} //在延时96.2ms到108ms,在发送连发码
for (j=0;j<692;j++) {s1=~s1;Delay13us();}//载波发送9ms的起始码
for (j=0;j<173;j++) {s1=1;Delay13us();} //2.25ms
for (j=0;j<44;j++) {s1=~s1;Delay13us();}//结束位
51单片机红外的遥控解码程序的编写
下面把这次红外编程的解码的经历简要的写一下,以便以后回顾总结:红外遥控过程是这样的:红外遥控器的矩阵键盘按键,接着专用芯片编码调制然后红外发射;红外接受头经过光电放大,解调,最后解码编程。
我的遥控专用芯片是UPD6122G-001.解码晶振是455kHz,调制载波频率是455kHz/12=38kHz。
此外调制信号是PWM进行调制的,0是脉冲波形位0.5625ms的高电平跟0.5625ms的低电平组成,1则是0.5625ms的高电平跟1.6785ms的低电平组成。
跟其他通用的波形一样,有键按下时,先是9ms的高电平的起始码,接着是一个4.5ms结果码,接下来就是数据了。
用户码的高8位,用户码的低8位,8位数据码,8位数据反码,最后还有一个停止位。
如果按键一直没松,则接下来就只是发送起始码(9ms高电平),接着是一个2.2ms的低电平,再接着是一个停止位。
我的红外接在单片机p3.7引脚上面,从网上收集了一些程序,基本上如同一则,汇编编写,跟外部中断还有关系。
于是便萌生了自己写一下的想法。
我的思路是用定时器进行计数,然后编程。
刚开始编写程序是,由于忘了对定时器的标志位进行置为,结果定时中断根本就没有执行,手头上又没有用仿真芯片,搞得我下载调试了十来次才发现了这个问题。
还有一个问题刚开始遥控能够解码的时候,可是一直按某个键,你按一次,她就变化一次,搞得我很是郁闷,差点儿没晕过去。
怎么找都不知道问题的所在,心里不断地打算放弃,不过最后还是坚持了下来,原来电路的实际解码电平跟资料上是相反的。
遥控器的实际电平由高变低,而电路板上却是由低变高。
这点确好相反。
总结:一要自信,二要坚持,才有可能完成你想做的事件。
#include"reg51.h"#include"2-16.h"#include"address.h"//需要显示的信息uchar code hello[] = "Hello,PengSen!";//变量uchar data psCount; //定时器计数器uchar data i;uchar data j;uchar data temp;uchar data dp[4]; //用来保存红外遥控的码值uchar data dp2[12];//用来显示红外遥控的码值sbit HW = P3^7;void delay(unsigned int y);void main(){//初始化initlcd();dp[0] = 0x0;dp[1] = 0x0;dp[2] = 0x0;dp[3] = 0x0;TMOD = 0x11; // 定时器0, 1工作模式1, 16位定时方式TH1 = 0xfe; //定时500uSTL1 = 0x33;TCON = 0x01;IE = 0x80;TR1 = 1;printf(hello,13);while(1){//报文头ET1 = 0;psCount = 0;while(HW == 1); //初始状态下,红外输出脚一直是高电平,等待遥控按键ET1 = 1;while(HW == 0);if( psCount > 17)//0.5* 17 = 8.5ms约为9.0ms{ET1 = 0;psCount = 0;ET1 = 1;while(HW == 1);if(psCount > 5)//超过0.5*5 = 2.5毫米,检查一下遥控命令是不是连发,不是则执行下面的程序{ET1 = 0;psCount = 0;dp[0] = 0x0;dp[1] = 0x0;dp[2] = 0x0;dp[3] = 0x0;//数据for(i = 0 ; i < 4; i++){for(j = 0; j < 8; j++){while(HW == 0);ET1 = 0;psCount = 0;ET1 = 1;while(HW == 1);if(psCount > 2)//根据波形长度判定码值为0或1temp = 0;elsetemp = 1;dp[i] |= (temp<<j);//保存键值}}}}//停止位while(HW == 1);//数据显示delay(20);dp2[0] = dp[0]/100 + 0x30;dp2[1] = dp[0]%100/10 + 0x30;dp2[2] = dp[0]%10 + 0x30;dp2[3] = dp[1]/100 + 0x30;dp2[4] = dp[1]%100/10 + 0x30;dp2[5] = dp[1]%10 + 0x30;dp2[6] = dp[2]/100 + 0x30;dp2[7] = dp[2]%100/10 + 0x30; dp2[8] = dp[2]%10 + 0x30;dp2[9] = dp[3]/100 + 0x30;dp2[10] = dp[3]%100/10 + 0x30; dp2[11] = dp[3]%10 + 0x30;printf(dp2,12);delay(20);}}//延时子程序void delay(unsigned int y){uchar x;for(;y!=0;y--)for(x=200;x!=0;x--); }//定时器1中断void timer1() interrupt 3{psCount++;TH1 = 0xfe; //定时500uSTL1 = 0x33;}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机红外电视遥控器C51程序代码单片机程序
//**************************************************************
//名称:单片机红外电视遥控器C51程序代码()
/*--------------------------------------------------------------
描述:
一般红外电视遥控器的输出都是用编码后串行数据对38~40kHz的方波进行
脉冲幅度调制而产生的.当发射器按键按下后,即有遥控码发出,所按的键
不同遥控编码也不同。
这种遥控码具有以下特征:
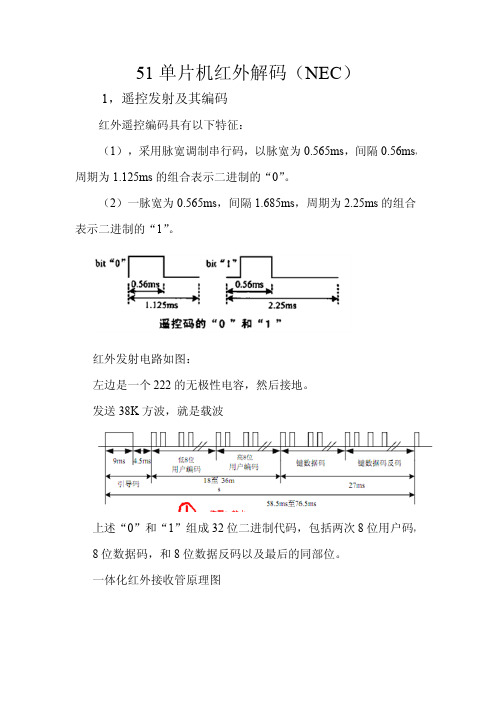
采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms
的组合表示二进制的“1”。
上述“0”和“1”组成的32位二进制码经38kHz
的载频进行二次调制,然后再通过红外发射二极管产生红外线向空间发射。
一般电视遥控器的遥控编码是连续的32位二进制码组,其中前16位为用户识别码,能区别不同的红外遥控设备,防止不同机种遥控码互相干扰。
后16位
为8位的操作码和8位的操作反码,用于核对数据是否接收准确。
根据红外编码的格式,发送数据前需要先发送9ms的起始码和4.5ms的结果码。
接收方一般使用TL0038一体化红外线接收器进行接收解码,当TL0038接收到38kHz红外信号时,输出端输出低电平,否则为高电平。
所以红外遥控器发送红外信号时,参考上面遥控串行数据编码波形图,在低
电平处发送38kHz红外信号,高电平处则不发送红外信号。
----------------------------------------------------------------*/
//编辑:
//日期:
//****************************************************************
#define uchar unsigned char //定义一下方便使用
#define uint unsigned int
#define ulong unsigned long
#include <reg51.h> //包括一个51标准内核的头文件
static bit OP; //红外发射管的亮灭
static unsigned int count; //延时计数器
static unsigned int endcount; //终止延时计数
static unsigned char flag; //红外发送标志
char iraddr1; //十六位地址的第一个字节
char iraddr2; //十六位地址的第二个字节
void SendIRdata(char p_irdata);
void delay();
//**************************************************************
void main(void)
{
count=0;
flag=0;
OP=0;
P3_4=0;
EA = 1; //允许CPU中断
TMOD = 0x11; //设定时器0和1为16位模式1
ET0 = 1; //定时器0中断允许
TH0 = 0xFF;
TL0 = 0xE6; //设定时值0为38K 也就是每隔26us中断一次
TR0 = 1; //开始计数
iraddr1=3;
iraddr2=252;
do{
delay();
SendIRdata(12);
}
while(1);
}
//**************************************************************
//定时器0中断处理
void timeint(void) interrupt 1
{
TH0=0xFF;
TL0=0xE6; //设定时值为38K 也就是每隔26us中断一次count++;
if (flag==1)
{OP=~OP;}
else
{OP = 0;}
P3_4 = OP;
}
//**************************************************************
void SendIRdata(char p_irdata)
{
int i;
char irdata=p_irdata;
//发送9ms的起始码
endcount=223;
flag=1;
count=0;
do{}while(count)
//发送4.5ms的结果码
endcount=117;
flag=0;
count=0;
do{}while(count)
//----------------------发送十六位地址的前八位-------------------
irdata=iraddr1;
for(i=0;i<8;i++)
{
//先发送0.56ms的38KHZ红外波endcount=10; //(即编码中0.56ms的低电平)
flag=1;
count=0;
do{}while(count)
//停止发送红外信号(即编码中的高电平)if(irdata-(irdata/2)*2) //判断二进制数个位为1还是0
{ endcount=41; //1为宽的高电平
}
else
{ endcount=15; //0为窄的高电平
}
flag=0;
count=0;
do{}while(count)
irdata=irdata>>1;
}
//-----------------------发送十六位地址的后八位-------------------
irdata=iraddr2;
for(i=0;i<8;i++)
{
endcount=10;
flag=1;
count=0;
do{}while(count)
if(irdata-(irdata/2)*2)
{endcount=41;}
else
{endcount=15;}
flag=0;
count=0;
do{}while(count)
irdata=irdata>>1;
}
//-----------------------发送八位数据------------------------------
irdata=p_irdata;
for(i=0;i<8;i++)
{
endcount=10;
flag=1;
count=0;
do{}while(count)
if(irdata-(irdata/2)*2)
{endcount=41;}
else
{ endcount=15;}
flag=0;
count=0;
do{}while(count)
irdata=irdata>>1;
}
//-------------------------发送八位数据的反码----------------------
irdata=~p_irdata;
for(i=0;i<8;i++)
{
endcount=10;
flag=1;
count=0;
do{}while(count)
if(irdata-(irdata/2)*2)
{endcount=41;}
else
{endcount=15;}
flag=0;
count=0;
do{}while(count)
irdata=irdata>>1;
}
endcount=10;
flag=1;
count=0;
do{}while(count) flag=0;
}
//**************************************************************
void delay()
{
int i,j;
for(i=0;i<400;i++)
{
for(j=0;j<100;j++) { };
}
}。