课程设计---直流电动机测速系统设计
双闭环直流调速系统设计

一、课程设计目的在《电机与拖动》、《电力电子技术》、《伺服系统》和《电力拖动自动控制系统》课程知识的基础上,完成课程的综合性设计。
通过课程设计环节的训练,包括设计方案的论证、参数计算、系统仿真和设计报告的撰写,掌握系统综合应用项目的设计流程和方法,加深对完整项目开发的的理解和掌握,培养应用系统的设计能力,初步积累双闭环直流调速系统的设计方法,以及分析问题和解决问题的能力,并进一步拓宽专业知识面,培养实践应用技能和创新意识。
电力系统综合课程课程设计是电气工程及其自动化专业的一门专业课程,它是一次综合性的理论与实践相结合的训练,也是本专业的一次基本技能训练,其主要目的是:1、理论联系实际,掌握根据实际工艺要求设计电力拖动自动控制系统的基本方法。
2、对一种典型的双闭环调速自动控制系统进行综合性分析设计,掌握各部件和整个系统的设计调试步骤、方法及操作实际系统的方法。
加强基本技能训练。
3、掌握参数变化对系统性能影响的规律,培养灵活运用所学理论解决控制系统中各种实际问题的能力。
4、培养分析问题、解决问题的独立工作能力,学会实验数据的分析与处理能力及编写设计说明书和技术总结报告的能力。
为下学期毕业设计作准备。
5、通过设计熟练地查阅有关资料和手册。
二、课程设计内容与要求1、本课程设计的对象直流伺服电机:学生自行查找电机型号直流测速机:学生根据设计任务选择2、本课程设计的内容要求设计一个直流双闭环调速系统。
其主要内容为:1、测定综合实验中所用控制对象的参数(在实验室完成)。
2、根据给定指标设计电流调节器和转速调节器,并选择调节器参数和具体实现电路。
3、按设计结果组成系统,以满足给定指标。
4、研究参数变化对系统性能的影响。
5、在时间允许的情况下进行调试。
3、本课程设计的设计要求a.调速范围D=5~10,静差率S≤5%。
b.空载启动时电流超调σi≤5%,转速超调σn≤10%(在额定转速时)。
c.动态速降小于10%。
d.振荡次数小于2次。
基于C51单片机直流电机测速仪设计

基于C51单片机直流电机测速仪设计摘要:电机的转速是各类电机运行过程中的一个重要监测量,测速装置在电机调速系统中占有非常重要的地位,特别是数字式测速仪在工业电机测速方面有独到的优势。
本文介绍了一种基于C51单片机的光电传感器转速测量系统的设计。
系统采用对射式光电传感器产生与齿轮相对应的脉冲信号,使用AT89C51单片机采样脉冲信号并计算每分钟内脉冲信号的数目,即电机对应的转速值,最终系统通过LCD实时显示电机的转速值。
经过软硬件系统的搭建,分别通过Protues软件系统仿真实验和实际电路搭建检查实验。
仿真实验表明本系统满足设计要求,并且结构简单、实用。
整个直流电机测速系统在降低测速仪成本,提高测速稳定性及可靠性等方面有一定的应用价值。
关键词:转速测量;光电传感器;单片机Based On C51 SCM Single DC Motor Speedometer DesignABSTRACT:Motor speed is all kinds of motor operation is an important process to monitor the amount of speed measuring device in the motor control system occupies a very important position, Especially the digital speedometer in the industrial motor speed has unique advantage. This paper describes a photoelectric sensor 51 SCM-based speed measurement system design. System uses a beam photoelectric sensor generates a pulse signal corresponding to the gear, the use of a sampling pulse signal AT89C51 SCM and calculating the pulse per minute, the number of signals that the speed of the motor corresponding to the value of the final system time through the LCD display the motor speed value.After a hardware and software system structures, respectively, through Protues software system to build the actual circuit simulation and experimental examination. Simulation results show that the system meets the design requirements, and the structure is simple and practical. DC Motor Speed entire system in reducing speedometer costs, improve reliability, speed stability and a certain application value.Keywords: Speed measurement; Photoelectric; Single chip micyoco目录1 绪论 (1)1.1 数字式转速测量系统的发展背景 (1)1.2 转速测量在国民经济中的应用 (1)1.3主要研究内容 (2)1.4 设计的目的和意义 (2)2 转速测量系统的原理 (4)2.1 转速测量原理 (4)2.2 转速测量计算方法 (5)3转速测量系统设计方案 (7)3.1 直流电机转速测量方法 (7)3.2 设计任务及方案 (8)4 直流电机测速系统设计 (9)4.1 单片机AT89C51介绍 (9)4.2 转速信号采集 (14)4.2 转速信号处理电路设计 (16)4.4 最小系统的设计 (17)4.4.1复位电路 (17)4.4.2 晶振电路 (20)4.5 显示部分设计 (20)5 直流测速系统仿真 (24)5.1 直流测速系统仿真 (24)5.1.1单片机最小系统仿真 (25)5.1.2 数码管显示仿真 (25)5.2 主程序流程设计 (26)5.2.1 主程序流程设计 (26)5.2.2 定时器的初始化 (27)5.3 实际电路实验 (28)参考文献 (30)致谢 (31)1 绪论1.1 数字式转速测量系统的发展背景在现代工业自动化高度发展的时期,几乎所有的工业设备都离不开旋转设备,形形色色的电机在不同领域发挥着很重要的作用。
基于单片机的直流电机调速系统的课程设计
一、总体设计概述本设计基于8051单片机为主控芯片,霍尔元件为测速元件, L298N为直流伺服电机的驱动芯片,利用 PWM调速方式控制直流电机转动的速度,同时可通过矩阵键盘控制电机的启动、加速、减速、反转、制动等操作,并由LCD显示速度的变化值。
二、直流电机调速原理根据直流电动机根据励磁方式不同,分为自励和它励两种类型,其机械特性曲线有所不同。
但是对于直流电动机的转速,总满足下式:式中U——电压;Ra——励磁绕组本身的内阻;——每极磁通(wb );Ce——电势常数;Ct——转矩常数。
由上式可知,直流电机的速度控制既可以采用电枢控制法也可以采用磁场控制法。
磁场控制法控制磁通,其控制功率虽然较小,但是低速时受到磁场和磁极饱和的限制,高速时受到换向火花和换向器结构强度的限制,而且由于励磁线圈电感较大,动态响应较差,所以在工业生产过程中常用的方法是电枢控制法。
电枢控制法在励磁电压不变的情况下,把控制电压信号加到电机的电枢上来控制电机的转速。
传统的改变电压方法是在电枢回路中串连一个电阻,通过调节电阻改变电枢电压,达到调速的目的,这种方法效率低,平滑度差,由于串联电阻上要消耗电功率,因而经济效益低,而且转速越慢,能耗越大。
随着电力电子的发展,出现了许多新的电枢电压控制法。
如:由交流电源供电,使用晶闸管整流器进行相控调压;脉宽调制(PWM)调压等。
调压调速法具有平滑度高、能耗低、精度高等优点,在工业生产中广泛使用,其中PWM应用更广泛。
脉宽调速利用一个固定的频率来控制电源的接通或断开,并通过改变一个周期内“接通”和“断开”时间的长短,即改变直流电机电枢上的电压的“占空比”来改变平均电.压的大小,从而控制电动机的转速,因此,PWM又被称为“开关驱动装置”。
如果电机始终接通电源是,电机转速最大为Vmax,占空比为D=t1/t,则电机的平均转速:Vd=Vmax*D,可见只要改变占空比D,就可以调整电机的速度。
平均转速Vd与占空比的函数曲线近似为直线。
4.1直流测速电动机

任务一 认识速度传感器
一、测速发电机传感器的要求
测速发电机(tachogenerator)是一种检测机械转速的电磁装置。就是
把转子转速转换为电压信号的机电式元件。它的输出电压与转速成正比关系, 即Ua=Kn。
如图4-1所示。
目录
任务一 认识速度传感器
测速发电机的输出电压能表征转速,因而可用来测量转速;测速发 电机的输出电压正比于转子转角对时间的微分,在解算装置中可以把 它作为微分或积分元件。
磁通反向, 因此合成磁场的磁通密度在半个极下是加强了, 在另外半个极
下是削弱了, 如图 (c)所示。 由于电枢磁场的存在, 气隙中的磁场发生畸变
, 这种现象称为电枢反应。
目录
•
如果电机的磁路不饱和(即磁路为线性), 磁场的合成就可以应用叠加
原理。 例如, N极右半个极下的合成磁通等于 1/2 主磁通与 1/2 电枢磁通之
•
4)电刷装置:电刷的作用是把转动的电枢绕组与静止的外电路相连接,
并与换向器相配合,起到整流或逆变器的作用。
• 转子部分:
•
转子称为电枢,包括电枢铁心、电枢绕组、换向器、风扇、轴和轴承等
。
•
1)电枢铁心:电机主磁路的一部分,用来嵌
• 放电枢绕组的,为了减少电枢旋转时电枢铁心中
目录
退出
返 回 上一页 下一页
磁场, 图 c是主磁场和电枢磁场的合成磁场。
目录
直流电机磁场
目录
•
磁场的分布在电机学中已作了分析,磁场的分布如图 (a)所示。电枢
电流所产生的磁场如图 (b)所示。由图 (b)可以看出, 在每个主磁极下面,
电枢磁场的磁通在半个极下由电枢指向磁极, 在另外半个极下则由磁极指
直流电机转速测量与控制系统的设计说明
目录1.《智能仪器综合设计》课程设计任务书 (2)1.1课程设计任务 (3)1.2课程设计目的 (3)1.3课程设计要求 (3)1.4课程设计容 (3)1.5课程设计报告要求 (3)1.6课程设计进度安排 (4)1.7课程设计考核办法 (4)2.设计方案 (5)2.1总体方案 (5)2.2PID算法 (5)2.2.1PID控制的基本组成 (5)2.2.2PID控制中的主要技术指标分析 (6)2.3PWM脉冲控制 (8)3.硬件模块 (9)3.1主体模块 (9)3.2显示与键盘模块 (10)3.3转动源模块 (12)3.4复位电路 (13)4.软件模块 (14)4.1主程序流程图 (14)4.2初始化模块 (14)4.3中断模块 (16)5.收获与体会 (18)参考文献 (19)附录 (20)1.《智能仪器综合设计》课程设计任务书题目:直流电机转速测量与控制系统的设计1.1课程设计任务日常生活和生产中,需要对各种电机的转速进行测量。
该综合设计要求完成基于AT89C52单片机的直流电机转速测量与控制系统的设计。
采用光电式传感器进行信号的转换,再经过整形、放大等电路处理,将信号送入单片机进行数据处理,能够对设定的电机转速进行自动PID调节,自动调节的效果可通过LabVIEW软件编写的上位机进行观察和调整。
1.2课程设计目的通过本次课程设计使学生掌握:1)微机接口技术与I/O通道电路的设计及实现方法;2)控制程序的设计及实现方法;3)微机控制系统的实际调试技巧。
从而提高学生对微机实时控制系统的设计和调试能力。
1.3课程设计要求1、该装置要求在智能仪器综合实验平台上完成软件编程与实现。
2、用数码管来分别显示工作状态、设定速度和实际速度。
3、用3只按钮来分别作为开机/关机键、速度设定上升键和下降键。
4、速度设定围500~3000转/分,在某个速度设置点,要求使用PID控制。
1.4课程设计容1、硬件电路原理图;2、软件流程图及程序;3、实物调试及结果。
直流电动机测速装置的设计
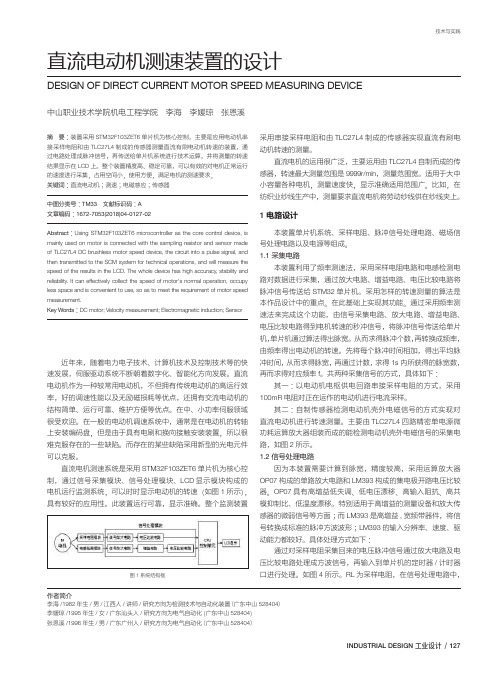
技术与实践INDUSTRIAL DESIGN 工业设计 / 127作者简介李海/1982年生/男/江西人/讲师/研究方向为检测技术与自动化装置(广东中山528404)李媛琼/1995年生/女/广东汕头人/研究方向为电气自动化(广东中山528404)张恩溪/1996年生/男/广东广州人/研究方向为电气自动化(广东中山528404)直流电动机测速装置的设计DESIGN OF DIRECT CURRENT MOTOR SPEED MEASURING DEVICE中山职业技术学院机电工程学院 李海 李媛琼 张恩溪采用串接采样电阻和由TLC27L4制成的传感器实现直流有刷电动机转速的测量。
直流电机的运用很广泛,主要运用由TLC27L4自制而成的传感器,转速最大测量范围是9999r/min ,测量范围宽。
适用于大中小容量各种电机,测量速度快,显示准确适用范围广。
比如,在纺织业纱线生产中,测量要求直流电机将劳动纱线供在纱线夹上。
1 电路设计本装置单片机系统、采样电阻、脉冲信号处理电路、磁场信号处理电路以及电源等组成。
1.1 采集电路本装置利用了频率测速法,采用采样电阻电路和电感检测电路对数据进行采集,通过放大电路、增益电路、电压比较电路将脉冲信号传送给STM32单片机。
采用怎样的转速测量的算法是本作品设计中的重点。
在此基础上实现其功能。
通过采用频率测速法来完成这个功能,由信号采集电路、放大电路、增益电路、电压比较电路得到电机转速的秒冲信号,将脉冲信号传送给单片机,单片机通过算法得出脉宽。
从而求得脉冲个数,再转换成频率,由频率得出电动机的转速。
先将每个脉冲时间相加,得出平均脉冲时间,从而求得脉宽,再通过计数,求得1s 内所获得的脉宽数,再而求得对应频率f 。
共两种采集信号的方式,具体如下:其一:以电动机电枢供电回路串接采样电阻的方式,采用100mR 电阻对正在运作的电动机进行电流采样。
其二:自制传感器检测电动机壳外电磁信号的方式实现对直流电动机进行转速测量。
交直流调速系统课程设计
目录交直流调速课程设计任务书 (2)前言 (4)关键词 (4)交直流调速课程设计说明书 (5)一、总体方案确实定 (5)1.1 现行方案的讨论与比拟 (5)1.2 选择PWM控制系统的优越性 (6)1.3采用转速电流双闭环的理由 (6)1.4起动过程电流和转速波形 (9)1.5 H桥双极式逆变器的工作原理 (9)1.6 PWM调速系统静特性 (11)二、双闭环直流调速系统的硬件结构 (12)2.1主电路 (13)2.2 电流调节器 (14)2.3转速调节器 (14)2.4控制电路设计 (15)2.5、控制环节电源设计 (16)2.6、限幅电路 (16)2.7转速检测电路 (17)2.8、电流检测电路 (17)2.9、泵升电压限制 (18)三、电机参数及设计要求 (19)3.1电路根本信息如下: (19)3.2计算反响关键参数 (19)四、课程设计心得体会 (23)五、系统主要硬件结构图 (24)参考文献: (25)交直流调速课程设计任务书一、题目:双闭环可逆直流PWM调速系统设计二、设计目的1、对先修课程〔电力电子学、自动控制原理等〕的进一步理解与运用2、运用?电力拖动控制系统?的理论知识设计出可行的直流调速系统,通过建模、仿真验证理论分析的正确性。
也可以制作硬件电路。
3、同时能够加强同学们对一些常用单元电路的设计、常用集成芯片的使用以及对电阻、电容等元件的选择等的工程训练。
到达综合提高学生工程设计与动手能力的目的。
三、系统方案确实定自动控制系统的设计一般要经历从“机械负载的调速性能〔动、静〕→电机参数→主电路→控制方案〞〔系统方案确实定〕→“系统设计→仿真研究→参数整定→直至理论实现要求→硬件设计→制板、焊接、调试〞等过程,其中系统方案确实定至关重要。
为了发挥同学们的主观能动作用,且防止方案及结果雷同,在选定系统方案时,规定外的其他参数由同学自已选定。
1、主电路采用二极管不可控整流,逆变器采用带续流二极管的功率开关管IGBT构成H型双极式控制可逆PWM变换器;2、速度调节器和电流调节器采用PI调节器;U*nm=U*i m =U cm=10V3、机械负载为对抗性恒转矩负载,系统飞轮矩〔含电机及传动机构〕GD2 =1.5Nm2;4、主电源:可以选择三相交流380V供电,变压器二次相电压为52V;5、他励直流电动机的参数:见习题集【4-19】〔p96〕n N=1000r/min,电枢回路总电阻R=2Ω,电流过载倍数λ=2;6、PWM装置的放大系数K s=11;PWM装置的延迟时间T s=0.4ms。
直流电机调速系统课程设计报告
直流电机调速系统设计报告题目:H桥&串口输出2016年3月一、设计任务设计并制作一套直流电机调速系统,主要包括两部分:主电路部分和以单片机为核心的控制电路部分。
要求设计、制作控制电路和主电路,实现如下功能:(1)通过码盘和光耦得到一系列脉冲,利用M法、T法或M/T法对这些脉冲在单片机中进行处理得到电机的转速,在液晶或数码管上进行显示;(2)DC/DC电路能够正常工作,通过旋钮或键盘设定转速,并能够通过电力电子电路输出合适的电压,使电机的转速达到设定转速。
(3)实验室提供24V直流电源为DC/DC电路供电,其余部分电源请利用220V市电自行设计。
数码管显示单元DC直流电源DC码盘和光耦驱动与保护电路单片机系统旋钮输入图1 系统总体框图二、硬件电路设计与制作2.1 显示部分电路设计使用计数器采集到电机转速后,需要用数码管进行显示。
我们组选择串口驱动数码管显示电路,74HC595芯片是一种串入并出的芯片,是8位串行输入/输出或者并行输出移位寄存器,具有高阻、关、断状态。
首先使用三极管构成驱动电路,驱动数码管。
采用单片机的P0.0-P0.2作为74HC595时钟信号与输入口,使数码管显示相应转速,具体实现电路如图1。
图1 显示电路原理图2.2 驱动部分电路设计驱动部分作为电机与单片机控制器的结合部分,是本次设计的主电路,需要完成DC/DC变化的功能。
单片机产生PWM波送给驱动芯片IR2110,2110通过驱动电路控制MOSFET开关改变加在直流电机上的电压,从而达到改变转速的目的。
单片机产生的PWM1和PWM2波形要相反,控制斩波电路的半桥互补通断。
电路设计图如图2所示。
图2 驱动电路原理图2.3 电源部分设计电源设计部分共分两个部分,一部分是IR2110的供电电压和所有芯片的供电电压,另一部分是USB口供电电部分,使用电脑供电,两部分电路通过拨码开关进行切换。
市电供电电源采用220V交流电变成15V交流电,经整流桥变成直流电,再经7815、7805稳压得到15V和5V直流电,分别给驱动和单片机系统供电。
直流电机光耦测速设计
学号11780131实习报告(生产实习)起止日期:2014 年6 月16 日至2014 年7 月11 日学生姓名岳刘香班级11电信科1班成绩指导教师(签字)计算机与信息工程学院2014年7 月11 日天津城建大学生产实习任务书2013—2014学年第2学期设计题目:直流电机光耦测速系统设计完成期限:自2014 年 6 月16 日至2014 年7 月11日共 4 周设计依据、要求及主要内容:一.实习的目的1.进一步熟悉和掌握单片机系统设计和编程原理。
2.掌握单片机的接口技术及相关外围芯片的外特性、控制方法。
3.通过设计,掌握以单片机核心的电路设计的基本方法和技术。
4.通过实际程序设计和调试,掌握模块化程序设计方法和调试技术。
5.通过完成一个包括电路设计和程序开发的完整过程,了解开发单片机应用系统的全过程,为今后从事相应开发打下基础。
二.实习的基本要求1.认真认识设计的意义,掌握设计工作程序,学会使用工具书和技术参考资料,并培养科学的设计思想和良好的设计作风。
2.提高模型建立和设计能力,学会应用相关设计资料进行设计计算的方法。
3.提高独立分析、解决问题的能力,逐步增强实际应用训练。
4.设计的说明书要求简洁、通顺,电路图内容完整、清楚、规范。
三.实习主要内容a) 设计实现功能STC12C5A60S2(引脚排序及基本功能同AT89S51)作为主控芯片,设计利用光电传感器对5V直流电机测速,系统要求:LCD1602显示当前电机速度,若转速超过限定,则发出声光报警。
b) 原理图设计1.原理图设计要符合项目的工作原理,连线要正确。
2.图中所使用的元器件要合理选用,电阻、电容等器件的参数要正确标明。
3.原理图要完整,CPU、外围器件、外扩接口、输入/输出装置要一应俱全。
c) 程序调计1.根据要求,将总体功能分解成若干个子功能模块,每个功能模块完成一个特定的功能。
2.根据总体要求及分解的功能模块,确定各功能模块之间的关系,设计出完整的程序流程图。
双闭环直流调速系统(课程设计)
4•仿真实验95•仿真波形分析13三、心得体会14四、参考文献161•课题研究的意义从七十年代开始,由于晶闸管直流调速系统的高效、无噪音和快速响应等优点而得到广泛应用。
双闭环直流调速系统就是一个典型的系统,该系统一般含晶闸管可控整流主电路、移相控制电路、转速电流双闭环调速控制电路、以及缺相和过流保护电路等。
直流调速是现代电力拖动自动控制系统中发展较早的技术。
就目前而言,直流调速系统仍然是自动调速系统的主要形式,在许多工业部门,如轧钢、矿山采掘、纺织、造纸等需要高性能调速的场合得到广泛的应用。
且直流电动机具有良好的起、制动性能,宜于在大范围内平滑调速,在许多需要调速和快速正反向的电力拖动领域中得到了广泛的应用。
由于直流拖动控制系统在理论上和实践上都比较成熟,而且从控制的角度来看,它又是交流拖动控制系统的基础。
所以加深直流电机控制原理理解有很重要的意义。
2•课题研究的背景电力电子技术是电机控制技术发展的最重要的助推器,电力电机技术的迅猛发展,促使了电机控制技术水平有了突破性的提高。
从20世纪60年代第一代电力电子器件-晶闸管(SCR)发明至今,已经历了第二代有自关断能力的电力电子器件-GTR、GTO、MOSFET,第三代复合场控器件-IGBT、MCT等,如今正蓬勃发展的第四代产品-功率集成电路(PIC)。
每一代的电力电子元件也未停顿,多年来其结构、工艺不断改进,性能有了飞速提高,在不同应用领域它们在互相竞争,新的应用不断出现。
同时电机控制技术的发展得力于微电子技术、电力电子技术、传感器技术、永磁材料技术、自动控制技术和微机应用技术的最新发展成就。
正是这些技术的进步使电动机控制技术在近二十多年内发生了天翻地覆的变化。
(3-16) 取:(3-17) ◎i=4.3%<5%,满足课题所给要求。
3.3速度调节器设计电流环等效时间常数1/K。
取KT乙=0.5,贝IJ:1二2X0.0067二0.0134K(3-15)转速滤波时间常数T on。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
专业课程设计题目三直流电动机测速系统设计院系:专业班级:小组成员:指导教师:日期:前言1.题目要求设计题目:直流电动机测速系统设计描述:利用单片机设计直流电机测速系统具体要求: 8051 单片机作为主控制器、利用红外光传感器设计转速测量、检测直流电机速度,并显示。
元件: STC89C52、晶振(12MHz)、小按键、 ST151、数码管以及电阻电容等2.组内分工(1)负责软件及仿真调试:主要由完成(2)负责电路焊接:主要由完成(3)撰写报告:主要由完成3.总体设计方案总体设计方案的硬件部分详细框图如图一所示 :数码管显示按键控制单片机 PWM 电机驱动一、转速测量方法转速是指作圆周运动的物体在单位时间内所转过的圈数,其大小及变化往往意味着机器设备运转的正常与否,因此,转速测量一直是工业领域的一个重要问题。
按照不同的理论方法,先后产生过模拟测速法 (如离心式转速表) 、同步测速法(如机械式或闪光式频闪测速仪) 以及计数测速法。
计数测速法又可分为机械式定时计数法和电子式定时计数法。
本文介绍的采用单片机和光电传感器组成的高精度转速测量系统,其转速测量方法采用的就是电子式定时计数法。
对转速的测量实际上是对转子旋转引起的周期脉冲信号的频率进行测量。
在频率的工程测量中,电子式定时计数测量频率的方法一般有三种:①测频率法:在一定时间间隔t 内,计数被测信号的重复变化次数N ,则被测信号的频率fx 可表示为f x =Nt(1)②测周期法:在被测信号的一个周期内,计数时钟脉冲数m0 ,则被测信号频率fx = fc/ m0 ,其中, fc 为时钟脉冲信号频率。
③多周期测频法:在被测信号m1 个周期内, 计数时钟脉冲数m2 ,从而得到被测信号频率fx ,则fx 可以表示为fx =m1 fcm2, m1 由测量准确度确定。
电子式定时计数法测量频率时, 其测量准确度主要由两项误差来决定: 一项是时基误差 ; 另一项是量化± 1 误差。
当时基误差小于量化± 1 误差一个或两个数量级时,这时测量准确度主要由量化± 1 误差来确定。
对于测频率法,测量相对误差为:Er1 =测量误差值实际测量值× 100 % =1N×100 % (2)由此可见,被测信号频率越高, N 越大, Er1 就越小,所以测频率法适用于高频信号( 高转速信号) 的测量。
对于测周期法,测量相对误差为:Er2 =测量误差值实际测量值× 100 % =1m0×100 % (3)对于给定的时钟脉冲fc , 当被测信号频率越低时,m0 越大, Er2 就越小,所以测周期法适用于低频信号 ( 低转速信号) 的测量。
对于多周期测频法,测量相对误差为:Er3 =测量误差值实际测量值100%=1m2×100 % (4)从上式可知,被测脉冲信号周期数m1 越大, m2 就越大,则测量精度就越高。
它适用于高、低频信号(高、低转速信号) 的测量。
但随着精度和频率的提高, 采样周期将大大延长,并且判断m1 也要延长采样周期,不适合实时测量。
根据以上的讨论,考虑到实际应用中需要测量的转速范围很宽 ,上述的转速测量方法难以满足要求,因此,研究高精度的转速测量方法,以同时适用于高、低转速信号的测量,不仅具有重要的理论意义,也是实际生产中的需要。
二、转速测量原理一般的转速长期测量系统是预先在轴上安装一个有 60 齿的测速齿盘,用变磁阻式或电涡流式传感器获得一转 60 倍转速脉冲,再用测频的办法实现转速测量。
而临时性转速测量系统,多采用光电传感器,从转轴上预先粘贴的一个标志上获得一转一个转速脉冲,随后利用电子倍频器和测频方法实现转速测量。
不论长期或临时转速测量,都可以在微处理器的参与下,通过测量转轴上预留的一转一齿的鉴相信号或光电信号的周期,换算出转轴的频率或转速。
即通过速度传感器, 将转速信号变为电脉冲,利用微机在单位时间内对脉冲进行计数,再经过软件计算获得转速数据。
即:n=N/ (mT) (1)◆n ———转速、单位:转/ 分钟;◆N ———采样时间内所计脉冲个数 ;◆T———采样时间、单位:分钟;◆m ———每旋转一周所产生的脉冲个数 (通常指测速码盘的齿数) 。
如果 m=60, 那么 1 秒钟内脉冲个数 N 就是转速 n, 即:n=N/ (mT) =N/60 × 1/60=N (2)◆通常 m 为 60。
在对转速波动较快系统或要求动态特性好而精度高的转速测控系统中, 调节周期一般很短,相应的采样周期需取得很小,使得脉冲当量增高,从而导致整个系统测量精度降低,难以满足测控要求。
提高采样速率通常就要减小采样时间T, 而 T 的减小会使采到的脉冲数值 N 下降,导致脉冲当量(每个脉冲所代表的转速) 增高,从而使得测量精度变得粗糙。
通过增加测速码盘的齿数可以提高精度,但是码盘齿数的增加会受到加工工艺的限制,同时会使转速测量脉冲的频率增高,频率的提升又会受到传感器中光电器或磁敏器或磁电器件最高工作频率的限制。
凡此种种因素限制了常规智能转速测量方法的使用范围。
而采用本文所提出的定时分时双频率采样法,可在保证采样精度的同时,提高采样速率,充分发挥微机智能测速方法的优越性及灵活性。
系统原理图各部分模块的功能:①传感器:用来对信号的采样。
②放大、整形电路:对传感器送过来的信号进行放大和整形,在送入单片机进行数据的处理转换。
③单片机:对处理过的信号进行转换成转速的实际值,送入 LED④LED 显示:用来对所测量到的转速进行显示。
三、最小系统的设计1、复位电路:MCS-51 单片机复位电路是指单片机的初始化操作。
单片机启运运行时,都需要先复位,其作用是使 CPU 和系统中其他部件处于一个确定的初始状态,并从这个状态开始工作。
因而,复位是一个很重要的操作方式。
但单片机本身是不能自动进行复位的,必须配合相应的外部电路才能实现。
图 1 复位电路2、晶振电路:晶振(图 2)是晶体振荡器的简称,在电气上它可以等效成一个电容和一个电阻并联再串联一个电容的二端网络,电工学上这个网络有两个谐振点,以频率的高低分其中较低的频率是串联谐振,较高的频率是并联谐振。
AT89C52 单片机内部有一个用于构成振荡器的高增益反相放大器。
引脚XTAL1 和 XTAL2 分别是此放大器的输入端和输出端。
这个放大器与作为反馈元件的片外晶体谐振器一起构成一个自激振荡器。
外接晶体谐振器以及电容 C1 和C2 构成并联谐振电路,接在放大器的反馈回路中。
对外接电容的值虽然没有严格的要求,但电容的大小会影响震荡器频率的高低、震荡器的稳定性、起振的快速性和温度的稳定性。
因此,此系统电路的晶体振荡器的值为 12MHz,电容应尽可能的选择陶瓷电容,电容值约为30 μF。
在焊接刷电路板时,晶体振荡器和电容应尽可能安装得与单片机芯片靠近,以减少寄生电容,更好地保证震荡器稳定和可靠地工作。
晶振有一个重要的参数,那就是负载电容值,选择与负载电容值相等的并联电容,就可以得到晶振标称的谐振频率。
图 2 晶振电路3、电机控制部分: (如下图)图 3:控制电机部分4、最小系统的仿真:图 4:最小系统的仿真5、总体电路图:图五:总体电路图四、电机转速控制系统软件设计:程序用 C 语言编写如下:#include<reg52.h>#define unint unsigned int#define uchar unsigned char sbit in1=P3^0;sbit in2=P3^1;bit way=0;uchar temp;unint count=0;///包含头文件///自定义变量///控制位定义//正反转标志位//计数定时中断累积次数uchar code zm[12]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x40,0x00};/// 在程序存储区定义字型码表uchar code wm[4]={0xfe,0xfd,0xfb,0xf7};/// 在程序存储区定义字位控制码表(千、百、十、个)unint disp_buf[4]={11,11,11,11}; ///显示缓冲器unint a;unint speedbuf; ///占空比控制字///速度值unint high1,low1,high2,low2;void display(); ///子函数声明void pwm_out();void delays(uchar n);void speedscan();void speedscan(){if(count==500){TR0=0;speedbuf=(TH0*256+TL0)*60;TH0=0;TL0=0;TR0=1;}}void display(){uchar j;speedbuf=a*4/10;if(way) disp_buf[0]=10;else disp_buf[0]=0;disp_buf[1]=speedbuf/100%10;disp_buf[2]=speedbuf/10%10;disp_buf[3]=speedbuf%10;for(j=0;j<4;j++){P2=wm[j];P0=zm[disp_buf[j]];delays(20);}}void delays(uchar n) {uchar i,j;for(i=0;i<5;i++)for(j=0;j<n;j++); }void main(){P0=0xff;P2=0xff;speedbuf=0;in1=0;in2=0;a=950;TMOD=0X15;为计数模式,使用方式2TH1=0Xfe;TL1=0X0c;TH0=0;TL0=0;EA=1;ET0=1;ET1=1;TR0=1;TR1=1;while(1){P1=0xff;temp=P1;if(temp>0xEF){ in1=0;in2=0;ET1=0;}else{ET1=1;if(temp==0xEE){ delays(40);if(temp==0xEE){ in1=1;in2=0; ///电机控制的初始化///定时器1 为定时模式,使用方式2;定时器0 ///装定时器初值///装计数器初值///开总中断///允许定时器0 中断///允许定时器1 中断///开计数器///开定时器//拉高P1 口电平,读数据way=0;}}if(temp==0xED){ delays(40);if(temp==0xED){ in1=0;in2=1;way=1;}}if(temp==0xEB){ delays(40);if(temp==0xEB){ a=a+50;if(a>=950)a=950;}}if(temp==0xE7){ delays(40);if(temp==0xE7){ a=a-50;if(a<=50)a=50;}}while(P1!=0xef);}speedscan();display();}}void timer_ 1()interrupt 3 using 1 {TR1=0;pwm_out();TR1=1;}void pwm_out(){if(way==0){ if(in1==0){high1=(65536-a)/256;low1=(65536-a)%256;TH1=high1;TL1=low1;count++;}else{high2=(64536+a)/256;low2=(64536+a)%256;TH1=high2;TL1=low2;}in1=~in1;}else{ if(in2==0){ high1=(65536-a)/256;low1=(65536-a)%256;TH1=high1;TL1=low1;count++;}else{high2=(64536+a)/256;low2=(64536+a)%256;TH1=high2;TL1=low2;}in2=~in2;}}五、系统软件仿真图:如图:系统仿真图六、心得及体会:本次实习我与我的组员做的是直流电机测速,当老师给出题目时,我们还是按照以前实习的解题步骤一步步的做,首先是查找相关的资料,如PWM 的工作原理。