电子设计-电动车跷跷板
电动车跷跷板自平衡系统设计_夏鲲
第24卷 第2期 电子测量与仪器学报 Vol. 24 No. 2 2010年2月JOURNAL OF ELECTRONIC MEASUREMENT AND INSTRUMENT· 179 ·本文于2009年6月收到。
*基金项目: 上海理工大学博士启动基金项目。
DOI: 10.3724/SP.J.1187.2010.00179电动车跷跷板自平衡系统设计*夏 鲲 张振国 丁 学 陈建强(上海理工大学光电信息与计算机工程学院电气系, 上海 200093)摘 要: 采用32位ARM 芯片LPC2138作为MCU, 由AccuStar 电子倾角传感器获得的角度信号经移动平均滤波法作数字滤波构成检测信号, 用步进电动机作为控制驱动装置, 形成增量式闭环数字PID 控制系统,使电动小车能自动完成在不同条件下于跷跷板上保持平衡的控制任务.实验结果表明, 该系统在板长为1.6 s 时, 初次平衡响应时间小于65 s, 二次平衡响应时间小于60 s, 平衡位置与水平位置偏差小于1.1°。
关键词: AccuStar 电子倾角传感器; 数字PID; 移动平均滤波法; 步进电动机 中图分类号: TP272 文献标识码: A 国家标准学科分类代码: 470.4017Design for the electric car and teeterboardself-balanced systemXia Kun Zhang Zhenguo Ding Xueming Chen Jianqiang(University of Shanghai for Science and Technology, Shanghai, 200093)Abstract: The 32-bit ARM chip LPC2138 was applied as the MCU and the stepper motor was used as the driven device. The angle signals derived from the AccuStar electronic inclinometer by using moving average digital filter helped to accomplish the closed loop digital PID control system and keep the balance of the teeterboard under different conditions. The experiment results show that when the length of the teeterboard is 1.6 meter, the first balance costs less than 65 seconds, the second balance costs less than 60 seconds and the deviation between the balance point and the horizontal position is less than 1.1 degree.Keywords: AccuStar electronic inclinometer; digital PID; moving average digital filter; stepper motor1 引 言移动机器人的姿态控制技术在诸如航空、航海等许多领域有着广泛的应用, 各种类型的数字倾角传感器应运而生[1-2]。
电动车跷跷板设计

1 设计任务 与要求
1 . 1设计 任务 在给定 条件 的翘翘 板上 , 小 车 主 要 完 成从一 端出发 行驶至平衡 点附近 , 停 留一 定的时 间后开 始寻找平衡 点 , 达 到 平 衡 点 之后行 驶至终 点 , 停 留一 定 的 时 间后 返 回
终点 。 如 图1 所示 。
要 控 制 系统 达 到 平 衡 位 置 , 需 要 加 入 一 个 好 。 控制ห้องสมุดไป่ตู้。 方案一 : 采用 P I D控 制 器 。 P I D控 制 器 是 一 种 适 应 范 围广 的 控 制 算 法 。 可 以 达 3 系统 硬件设计 到 一 般 的控 制 要 求 。 跷 跷 板 的 平 衡 是 要 达 3 . 1 系统 的总 体设计 系统 总 体 框 图 如 图2 。 到 两 边 的 力矩 平 衡 。 小 车 行 驶 到 某 一 个 特 . 2 功能 模块设 计 定 的 位 置 才能 使 跷 跷 板 平 衡 。 方案二 : 采用 3
工 业 技 术
S C I E N C E&T E C H N O L O G Y .
匪圆
电动 车 跷 跷 板 设 计
王 贵山 刘 亚茹 ( 国防科 学技 术大 学机 电工程 与 自动 化学院 湖 南长 沙
4 1 0 0 0 3 )
摘 要: 本设 计主要 完成通过 控制 电动小 车的运 动来保持 翘 翘板 的平衡 , 整体采 用X  ̄ . M C U 结构。 跷跷板 上配 有倾 角传 感器 , 板 面以及 两端 贴有 黑线作 为循迹 和检 测起 点终 点的标 志 。 4 、 车配 有嵌入 式控 制芯 片MC 9 S I 2 XS 1 2 8、 灰度 循迹检 测模 块 , B T S 7 9 7 0 全桥 电机 驱 动l 电路 。
基于单片机AT89S52的电动车跷跷板设计

龙源期刊网
基于单片机AT89S52的电动车跷跷板设计作者:贾丽霞
来源:《现代电子技术》2012年第23期
摘要:该文通过采用AT89S52作为控制核心,设计了整个电动车跷跷板系统。
系统的硬件部分主要包括:电机驱动模块、步进电动机、平衡检测模块、光电检测模块、液晶显示模块以及红外遥控模块;软件部分则采用高效的C语言编写实现了平衡检测和校正功能。
总体来说,系统的设计符合要求,可以在规定的时间内达到平衡状态。
关键词:电动车跷跷板;AT89S52;平衡检测;角度传感器
中图分类号:TN911.7-34文献标识码:A文章编号:1004-373X(2012)23-0132-03。
跷跷板小车制作
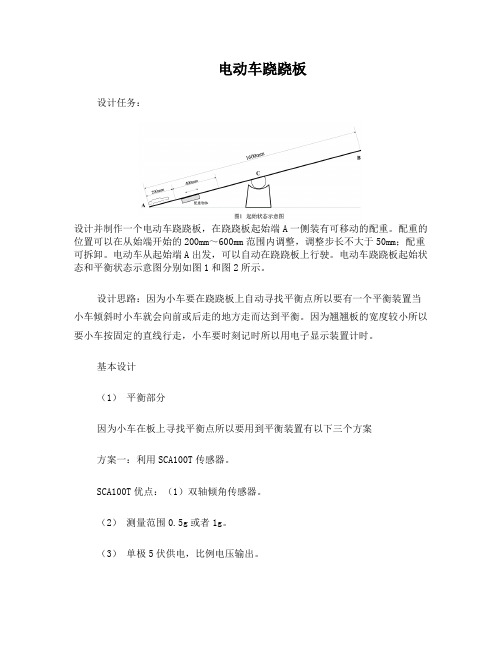
电动车跷跷板设计任务:设计并制作一个电动车跷跷板,在跷跷板起始端A一侧装有可移动的配重。
配重的位置可以在从始端开始的200mm~600mm范围内调整,调整步长不大于50mm;配重可拆卸。
电动车从起始端A出发,可以自动在跷跷板上行驶。
电动车跷跷板起始状态和平衡状态示意图分别如图1和图2所示。
设计思路:因为小车要在跷跷板上自动寻找平衡点所以要有一个平衡装置当小车倾斜时小车就会向前或后走的地方走而达到平衡。
因为翘翘板的宽度较小所以要小车按固定的直线行走,小车要时刻记时所以用电子显示装置计时。
基本设计(1)平衡部分因为小车在板上寻找平衡点所以要用到平衡装置有以下三个方案方案一:利用SCA100T传感器。
SCA100T优点:(1)双轴倾角传感器。
(2)测量范围0.5g或者1g。
(3)单极5伏供电,比例电压输出。
(4)长期稳定性非常好。
(5)高分辨率,低声,工作温度范围广。
缺点:灵敏度太高,价格昂贵,抗干扰能力差。
方案二:利用水银开关。
优点:(1)价格低,容易买到。
(2)制作方便,操控性好。
(3)工作范围广缺点:不稳定,水银液体不太容易控制。
方案三:利用旋转型可调电阻和铅坠。
优点:(1)价格低,容易组装。
(2)操控性好,灵敏度高。
(3)可以利用电阻的变化算出倾斜角。
缺点:有摩擦影响,受外界影响。
综上所述:经比较方案三比较好实验室中可以找到所用器材,可以通过电阻的变化算出倾角,价格较为便宜。
方案三的具体方法:首先将可变电阻的旋钮与铁杆连接起来,铁杆的另一端是较重的铅锤。
当小车的倾角变化时由于铅锤的重力作用在小车的带动下可变电阻的阻值产生变化,电压或电流发生变换传给单片机从而控制小车来找平衡点。
平衡装置原理图:(2)小车寻路装置:方案一启发:利用小车红外向寻路装置,可以让小车沿黑线在桥面上行走,当小车找到平衡点时小车自动停止,当小车到达桥的尽头是黑线消失小车停止倒行,这样可以防止小车一直沿直线行走能掉下桥。
方案二可以在小车两侧按上传感装置让小车不能掉下桥去。
电动车跷跷板设计

57科技资讯 S CI EN CE & T EC HNO LO GY I NF OR MA TI ON 工 业 技 术1 设计任务与要求1.1设计任务在给定条件的翘翘板上,小车主要完成从一端出发行驶至平衡点附近,停留一定的时间后开始寻找平衡点,达到平衡点之后行驶至终点,停留一定的时间后返回终点。
如图1所示。
2 方案比较与论证2.1各种方案比较与选择电机选择:为实现小车的运动,还有完成跷跷板的平衡调节,电机应该具有较好的灵敏度和动力。
方案一:直流电机,直流电机响应比较快,调节起来比较方便,价格也比较便宜,可以实现高速的选择。
但是力矩有一定的限制。
方案二:减速电机,减速电机驱动能力强,制动性也好,调节平衡比较方便,但是响应比较慢。
通过实践,直流电机速度快但是动力不强,制动性比较差,不能较好的实现平衡的调节,减速电机虽然反应慢,但是可以满足平衡的调节要求,因此选择减速电机。
倾角测量传感器:倾角是小车运行的控制量,它的准确获取才能使小车能够稳定地达到平衡,并且能够准确测量倾角,还能加大控制量。
方案一:倾角传感器,经测量倾角传感器灵敏度高,跷跷板两端采样值的差值20。
方案二:MMA7260三轴加速度计,该传感器可以测量重力延竖直方向上的分量,但是通过实际的检测发现其灵敏度低,且不稳定。
控制器的选择:对于一个不稳定系统,要控制系统达到平衡位置,需要加入一个控制器。
方案一:采用PID控制器。
PID控制器是一种适应范围广的控制算法。
可以达到一般的控制要求。
跷跷板的平衡是要达到两边的力矩平衡。
小车行驶到某一个特定的位置才能使跷跷板平衡。
方案二:采用步进法不断搜索平衡点,使系统达到平衡。
步进调节比较稳定。
由于倾角传感器的灵敏度的限制,控制量太小用PD控制器实现起来比较麻烦,而且参数的调节也不好控制,因此我们采用步进控制。
2.2控制算法设计采用步进控制,角度的变化量和长度的变化量均随时间而变,并且和各自速度相关,因此,引入小车每个控制周期的步进量 v ,和角度每个控制周期的变化量 ,假设速度控制的周期为T(ms),那么就有下面的式子合力钜: ()cos(T)f M G L v T M 合 (1)每个控制周期,先让小车走一段距离,停止一定时间测量角度,然后以这个角度为依据进行下一次平衡调节,如果所调的参数满足式子(1),那么跷跷板最终可以达到平衡。
电动车跷跷板

电动车跷跷板设计跟总结报告摘要:本设计为使电动车在跷跷板上按要求准确运行采用了单片机A T89C51最小系统作为电动车的检测和控制系统。
通过红外发射接收一体探头检测路面黑色寻迹线,使小车按预定轨道行驶,根据角度传感器检测跷跷板的平衡状态控制电动车使其在跷跷板上达到动态平衡。
再加上基于STM8S单片机的键盘、液晶显示电路,构成了整个系统的硬件总电路。
最后通过软件设计,实现了按预定轨道行驶、保持平衡等功能。
关键字:STM8S 跷跷板角度(倾角)传感器1.方案设计与验证方案一:改装摇控电动车,利用单片机直接控制电动机,采用限位开关检测小车行驶位置。
由于小车是由单片机直接控制,所以驱动不了电机,实现不了小车的基本功能。
用限位开关不利于用小车的独立运行,且控制不便。
方案二:自制小车,利用步进电机,采用单片机控制,用电位器自制角度传感器,自制小车,制作过程极其复杂,且时间紧张,没有较好的机械部件支持,步进电机不易购买,体积较大,供电系统复杂,价格昂贵。
自制传感器精度不高,反应不灵活,线性度太差。
无法实现角度与电阻的线性转换。
方案三:自制小车,利用步进电机,采用stm8s单片机控制,使用现成的角度传感器跟现成的L298N电机驱动模块,成本低,花费时间短,精度高。
综上考虑,我们选择了方案三,经过一番仔细的论证比较,我们最终确定的系统详细方框图如下:2.电路设计2.1寻迹线探测模块通过光电检测器来实现黑白线的监测,当检测到黑线时输出端为低电平,白线时为高电平。
两个TCRT5000来实现小车走直线。
输出端要加上拉电阻,才能得到稳定信号,其原理图如图所示。
2.2电机驱动模块使用L298N,用单片机PWM能实现加速,减速,直线,转弯,后退等动作,原理图如下:3.3倾角检测模块MMA7361角度传感器采用了信号调理、单级低通滤波器和温度补偿技术,并且提供了2个灵敏度量程选择的接口和休眠模式接口,该产品带有低通滤波并已作零g补偿,原理图如下:4软件设计5测试方法跟结果仪器名称型号用途数量计算机联想调试程序 1数字万用表my-65 各种电路参数 1秒表测量时间 1测量结果次数到达A点时间到达B点时间到达C点时间总时间1 8.93 6.82 9.66 25.412 15.72 6.75 8.79 31.263 20.65 6.59 7.88 35.126设计总结经过我们小组的努力,我们终于成功的完成了题目的要求,并在此基础上进行了创新。
基于AT89S52单片机的电动车跷跷板系统设计

基于AT89S52单片机的电动车跷跷板系统设计作者:张建化陈跃熊永超来源:《现代电子技术》2008年第24期摘要:介绍电动车跷跷板系统的设计与实现。
该系统包括单片机系统电路、寻迹检测电路、平衡检测电路、步进电机驱动电路、数码显示电路等。
在系统中,以AT89S52单片机为电动小车控制核心,使用反射式红外发射接收器来检测轨迹,步进电机作为动力源实现小车前进后退和转向控制,用2个水银开关控制完成平衡状态的检测,用数码管分阶段实时显示电动车行驶所用时间。
3次实验数据表明,这里所提出的平衡检测方案是有效可行的。
关键词:寻迹检测电路;步进电机;跷跷板系统;平衡检测电路中图分类号:TP271.4文献标识码:B文章编号:1004-373X(2008)24-163-03Design of Seesaw System with Electric Vehicle Based on AT89S52 Single Chip ComputerZHANG Jianhua,CHEN Yue,XIONG Yongchao(Xuzhou Institute of Technology,Xuzhou,221008,China)Abstract:Design and implementation of seesaw system based on electric vehicle are introduced.The control system consists of AT89S52 single chip computer system,autonomous tracing circuit,balance detection circuit,driving circuit of stepping motor and LED display circuit.Centering on AT89S52,the track detection is realized by reflective infrared emitter and receiver and the steering of the vehicle is driven by stepping motor.The detection of balance state is implemented by two mercury switches and the travel time is displayed with LED separately.The scheme is proved to be effective and practical by experimental results during three tests.Keywords:autonomous tracing circuit;stepping motor;seesaw;balance detection circuit1 引言2007年全国大学生电子设计大赛的F题目是“电动车跷跷板”[1];题目要求设计并制作一个电动车跷跷板,使得电动小车从图1所示跷跷板起始端A出发在30 s内到达中心点C并保持平衡5 s,之后在30 s内到达跷跷板末端B并停留5 s,最后在1 min内退回到起始端A。
电动车跷跷板设计 采用AVR Mega系列单片机Mega16作为主控芯片

摘要:本系统采用AVR Mega系列单片机Mega16作为主控芯片,利用定时器中断产生序列脉冲控制步进电机动作和变频调速。
行程中使用红外对管探测引导线进行路线的准直调整及边缘检测。
使用倾角传感器完成倾角探测实现平衡的调节。
并利用STA013芯片对MP3进行解码,实现平衡状态的语音播报。
各动作过程中小车所用时间及与小车与水平面的夹角通过LCD即时显示。
关键词:Mega16 倾角传感器步进电机Abstract: This system adopts A VR micro processer Mega16 as main controller. The processer directs the motion of the motor by a sequence of pulses generated by the MCU timer interruption. In the purpose of adjusting its equilibrium,this system utilizes the inclination sensor to measure the angle of horizontal inclination In the process, and boundary detect is completed the collimation adjustment in the help of the light sensors. STA013 is put to use to decode the mp3,thus to report the equilibrium. The time spent in each process and the dip angle is displayed in the LCD.Keywords: Mega16 inclination sensor step-motor一、系统方案(一)实现方法:本系统的主要设计任务是完成一个精确定位运动的平衡小车系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大学生电子设计竞赛电动车跷跷板参赛学生:学校:赛前指导老师:2012年9月电动车跷跷板摘要本设计采用两个凌阳SPCE061A 16位单片机作为控制核心。
其中一个安装在小车上,另一个持在使用者手中连接键盘和LCD,通过无线模块进行双机通讯,实现远程对小车运行状态的实时监测。
为了对小车的行为进行精确控制,采用步进电机进行驱动。
系统通过倾角传感器采集跷跷板的倾角变化后传给单片机。
程序控制方法采用PID算法,使小车通过一个二阶欠阻尼脉冲响应过程最后趋于动态平衡。
根据设计需要,车体采用有机玻璃与铝合金自制而成。
关键词:SPCE061A单片机,角度传感器,光电传感器,PID算法.Abstract:This system takes two SPCE061A 16 bit microprocessor as the control center, one fixed on the car and another connected with keyboard and LCD handed by the controller. In this system, wireless is used to complete the two processors` communication to acquire a perfect interface between the controller and the whole control system. The car with four wheels is driven by two stepper motors, and through the angle sensitive gathering the information about the teeterboard’s equinity condition and then send to the microprocessor. The system takes the PID as main control method, through a progress of two pulse damping response, the car and the teeterboard finally reach an equinity condition.Keywords: SPCE061A microprocessor, angle sensor, light sensor, PID.1.系统方案设计1.1实现方法采用倾角传感器检测跷跷板与水平面的夹角,通过PID算法控制小车寻找平衡位置。
当跷跷板在允许范围内满足达到平衡状态时,暂停5秒后行驶到跷跷板B端;当小车的上的四个光电开关同时检测到预先粘贴在跷跷板B端上的黑线时记数1,并倒车回到跷跷板A端,当四个光电开关第二次同时检测另一端的黑线时记数2,小车停止,此时基本部分完成。
在发挥部分中,我们采用黑线引导小车走上跷跷板,小车启动时在水平位置,以此为标志来选择调用发挥部分所需要的程序,使小车在找到平衡之后停在原位并在收到扰动之后自动寻找新的平衡。
在完成题目要求的同时,我们也做出了自己的特色。
我们利用一个从单片机制作了一个手持观测系统,进行小车状态的实时播报和显示,另外还制作了电池低电压报警电路。
1.2方案比较与论证1.2.1控制器模块由于题目要求的小车功能较多,如果采用一个单片机会使各模块之间的程序嵌套复杂,而且难以实现总体系统的稳定性要求。
此外该控制系统程序庞大,包括角度传感器、光电传感器,LCD,语音模块,时钟等模块,一个单片机难以存储。
所以我们采用两个SPCE061A 16位单片机,一个为主控制器安装在小车上来控制小车的行驶,另一个为从单片机持在控制者手中,用来连接LCD,键盘以及语音模块。
主从单片机之间采用无线通讯,实现两机之间的信息交流。
这样不仅可以很好的解决上述问题,而且使人机交互界面变得更加方便完美,也更加人性化和智能化。
1.2.2电机驱动模块方案一:采用H桥式电路驱动的直流电机作为小车驱动。
直流减速电机输出力矩大,功耗相对较低,且运行平稳,但本题目需要对小车的位置进行精确步进控制,而直流电机输出轴之间存在一定间隙,而且不能精确定位控制,所以我们放弃此方案。
方案二:采用输出力矩相对较大的步进电机,这样能够保证两个轮子的速度基本相同,实现了小车的精确控制。
为了使步进电机低速时转动更平滑,采用专门的电机细分驱动芯片TA8435驱动电机,利用两个定时器控制电机速度,实现小车的速度与方向调整。
实践证明该方案电路简单、控制方便且工作稳定。
电路见附图一。
所以我们选择方案二。
1.2.3角度测量模块采用市场购买的低成本双轴倾角传感器ZCT245AL-485。
ZCT245AL-485输出采用半双工通信方式RS485与单片机UART互通信息。
它具有零角度设定,波特率可选等功能。
ZCT245AL-485的精度高达0.1度,侧角范围正负45度,每秒送给单片机15次倾角值。
完全可以满足本题目要求。
测量方向见图1。
程序见附录图1倾角传感器测量方向1.2.4 行进路线准直方案论证与选择在跷跷板上贴宽度为2cm的黑线,采用发射接收一体化的单光束反射取样式光电传感器RPR220作为敏感元件,利用红外线对不同颜色的反射系数不同而产生强弱电流信号,该方案受外界环境的影响比较小,抗干扰性比较强。
如寻迹原理图所示,当1,2检测到黑线,3,4白色时,小车会通过差速左转直至1,2检测通时到黑线为止。
电路图见附图2。
程序见附录1.2.5显示及语音模块由于本设计采用的是凌阳SPCE061A单片机,其芯片内部具有专门的语音功能。
本控制系统对于语音没有很高的要求,而且从单片机所承担的任务较少完全能够利用SPCE061A单片机自身资源实现语音功能。
时间,角度以及路程的实时显示采用LCD模块OCMJ128x64,自带字库,编程简单,而且功能齐全。
1.2.6电源模块为了减轻小车重量,方便小车自由行驶,我们采用可充电的大容量锂电池作为小车电源,输出电压12V。
中间加装一个开关电源稳压至5伏,给单片机等控制电路供电,电源效率高,比7805等三端稳压器节省能源。
1.3系统设计1.3.1 系统总体方案经过上述的分析和论证,决定了系统各模块采用的最终方案如下:车体:由有机玻璃和铝合金片加工而成;主控单元:两个凌阳16位单片机SPCE061A;循迹模块:接收一体化红外传感器RPR220;倾角检测模块:数字式双轴倾角传感器(ZCT245AL-485)驱动模块:两相混合式步进电机42BYG021+TA8435细分驱动芯片语音播报模块:单片机自带D/A+基于SPY0030的功率放大电路+扬声器计时模块:DS1302和凌阳单片机内部时钟显示模块:OCMJ128x64 LCD单片机无线通讯:半双工无线通讯模块nRF24011.4结构框图(见图3)图3系统结构框图2.理论分析与计算2.1测量与控制方法 1). 小车平衡的PID 算法经过分析可得小车在翘翘板上寻找平衡点的是一个二阶欠阻尼震荡过程如图4:图4 二阶欠阻尼震荡 算法公式:tt k dtt k t k t V t σσθθθθ)()(1])([)(30201+++=⎰,其中])([01θθ+t k 是比例环节 ,⎰+dtt k t ])([1002θθ是积分环节,tt k σσθ)(3是微分环节。
比例环节:及时成比例地反映控制系统的角度偏差信号])([01θθ+t k ,偏差一旦产生,通过角度传感器传给单片机,单片机立即产生调整控制信号,])([01θθ+t k 。
其中常数0θ使用来控制翘翘板达到平衡位置时与水平面的夹角。
在题目要求中0θ=0即跷跷板要在水平位置平衡。
积分环节:主要用于消除跷跷板趋于平衡时的稳态误差,提高系统的无差度。
可是积分环节动态反映时间较长,这样虽然是系统更加稳定,但是却延长了系统的动态相应时间,而且算法复杂,考虑到该题目中的平衡的控制并不是很复杂,而且有允许在要求范围内存在些许误差,所以我们放弃积分环节。
微分环节:微分环节能反映角度偏差信号的变化趋势(变化速率),并能在角度偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。
在该微分控制中,控制器系统的输出速度)(t V 与输入误差信号的微分(即角速度)tt σσθ)(成正比关系。
微分环节使抑制误差的作用变化“超前”,即在误差接近0时,抑制误差的作用就应该是0。
综合考虑我们决定采用PD 算法来实现整个系统的平衡控制。
公式为:tt k t k t V σσθθ)()()(31+=。
2.2 理论计算确定参数小车启动时,)(t θ=5度,tt σσθ)(=0度/秒,所以)()(1t k t V θ=。
小车由点A 到点C 大约需要10~20秒的时间,/AC/=80cm 。
t /AC/)()(1==t k t V θ,推出度秒)(5*20~1080(t)t /AC/1cm k ==θ。
可得出1k 的取值范围在(0.8,1.6)区间之内。
根据多次测试结果参数3k 在区间(1,1.3)范围内时小车寻找的平衡的效果最好。
2.3误差分析由于系统存在很多外在因素引起的误差,比如步进电机低速转动时的震动使角度传感器的制在一定范围内波动,因而对小车寻找平衡产生很大的干扰;即使小车处于平衡点时,跷跷板仍然存在微小的扰动,这些扰动会使小车不停的移动,从而大大延迟了小车调节平衡的时间,消除这些影响,我们设定当-2度<)(t θ<2度时,比例环节作用关闭,当-1.4度<tt σσθ)(<1.4度时积分环节关闭,由此来消除外界环境因素及小车子身设计所带来的误差影响。
3.电路与程序设计3.1检测与驱动电路电机驱动电路:电路见附图一:细分电机驱动芯片TA8435电路图 直线寻迹模块:电路见附图二:光电对管寻迹电路图3.2总体电路图见附图三:系统总线图3.3软件设计与工作流程图该小车控制系统根据题目要求主要包括角度检测程序,时间显示,语音播报和寻迹程序等,以及我们在创新发挥部分自加的无线通讯模块。
为了节省篇幅,在这我们只附上我们的程序流程图,(即图五)。
图5程序流程图程序代码见附录:部分程序代码4.结果分析4.1创新发挥我们采用自制车体,题目要求实时显示小车各阶段所用的时间等信息,若将LCD安装在不断运动的小车上,观察极为不便,为此我们为了方便控制者实时观察小车的行驶状态,我们用一个从单片机制作了一个手持人机交换系统,与主单片机之间采用nRF2401相互交换信息。
4.2结果分析1).测试仪器:PC机、秒表、卷尺;SPCE061单片机系统2).将系统的电机模块、直线行进模块、角度测量模块、液晶显示模块和语音模块分开测试,通调后在进行整机调试,以提高测试效率。