电控高精度偏振控制器的制作流程
三环式偏振控制器原理
三环式偏振控制器原理
三环式偏振控制器是一种电子设备,它能够控制电磁波的偏振方向。
它的工作原理是通过三个环的反射,使光线的偏振方向发生变化。
这三个环分别是偏振器、衰减器和旋转器。
偏振器的作用是使光线只能通过一个方向,其他方向的光线被过滤掉。
衰减器的作用是控制光线的强度,使其达到最佳的工作状态。
旋转器的作用是旋转光线的偏振方向,从而实现对偏振方向的控制。
三环式偏振控制器广泛应用于通信、医疗、军事、航空、航天等领域,具有重要的应用价值和意义。
其原理简单易懂,而且具有较高的控制精度和稳定性,是一种非常优秀的光学控制设备。
- 1 -。
pwm控制电路设计
PWM(Pulse Width Modulation,脉宽调制)是一种常用的电子控制技术,通过改变信号的脉冲宽度来控制电路的输出功率。
下面是PWM控制电路的设计步骤:
1. 确定控制信号的频率:PWM信号的频率决定了控制电路的响应速度和输出精度。
一般情况下,PWM信号的频率在几十kHz到几百kHz之间。
2. 确定控制信号的占空比:占空比是指PWM信号中高电平的时间占整个周期的比例。
占空比决定了输出电路的平均功率。
一般情况下,占空比在0%到100%之间。
3. 选择PWM控制器:PWM控制器是用来生成PWM信号的电路。
常见的PWM控制器有555定时器、微控制器等。
根据具体的应用需求选择合适的PWM控制器。
4. 设计PWM输出电路:根据PWM控制器的输出信号,设计相应的输出电路。
输出电路可以是MOSFET、三极管等,用来控制负载的通断。
5. 调试和优化:完成PWM控制电路的设计后,进行调试和优化。
通过观察输出波形和测量输出功率,调整控制信号的
频率和占空比,以达到期望的控制效果。
需要注意的是,PWM控制电路设计需要根据具体的应用需求进行调整和优化。
以上是一个基本的设计流程,具体的设计细节还需要根据具体情况进行进一步研究和实践。
光纤偏振控制器的原理
光纤偏振控制器的原理
光纤偏振控制器是一种光学器件,通过调节光纤中的偏振状态来控制
光信号的传输和调制。
它是光纤光学网络中必不可少的一部分,在光
通信、光传感、光调制等领域有着广泛的应用。
光纤偏振控制器的原理主要是基于光在光纤中传输的偏振现象和波导
的作用。
在光纤中,光的偏振状态可以分为两种,即水平和竖直偏振。
而波导则可以将光分为两个不同方向的偏振光。
因此,通过波导的调控,可以控制光的偏振状态。
光纤偏振控制器一般包含一个波导和一个电极。
当电极中施加电场时,波导的折射率会发生变化,从而使得光沿着波导的传播速度和方向发
生变化。
这样就可以实现对光的偏振状态的控制,包括将水平偏振光
转换为竖直偏振光,将竖直偏振光转换为水平偏振光,以及将任意偏
振光转换为特定的偏振光等。
值得注意的是,光纤偏振控制器的工作原理与波长有关,因为电极施
加的电场对不同波长的光的折射率变化不同,因此波导的调控效果也
会不同。
总之,光纤偏振控制器是一种重要的光学器件,它通过调节光纤中的偏振状态来实现对光信号的传输和调制。
其原理基于光在光纤中传输的偏振现象和波导的作用,利用波导的调控能力来实现对光的偏振状态的控制。
这种技术在光通信、光传感、光调制等领域有着广泛的应用前景。
电气作业指导书电气控制柜制作流程及调试流程.
电气控制柜制作流程及调试编号:BN-S-102
1.选型:根据清洗工艺和清洗要求选配电子原器件,使之达到清洗要求。
2.检验:检查到货的电子原器件(合格证、产品型号、性能指标、技术参数。
3.制作:
3.1根据电器柜的尺寸,合理布局电子原器件,以美观、安全、互不干涉为目标,
充分利用空间,充分利用电子产品性能。
3.2选线:根据国家标准,合理选配电线的颜色和型号。
3.3根据电气原理图进行合理接线,用号码机打印号码管,用剥线钳进行剥线,
用压线钳进行压线,使之安全、牢固。
3.4复查:检查是否有漏接或少接的线,检查是否与图纸一一对应,力求完善,
安全。
3.5装柜:接好线的底板进行装柜,柜内装照明灯、排气风扇、柜子资料箱。
3.6制作柜子的标牌,装机容量、电压、电流。
3.7制作电气柜的使用操作说明书和安全注意事项。
4.调试
4.1电柜配装设备,进行合理接线,布线。
使用波纹管保护接线,电缆编号接线,
做到易查易检。
4.2校点:PLC上的点号与外布线点号一一对应,使之与图纸稳合。
4.3手动调试动作:检查每个动作点是否到位,是否合符工艺要求。
4.4自动调试:检查整个设备的运行状态及性能是否稳定。
编制:审核:批准:。
控制方法及设备的制作流程
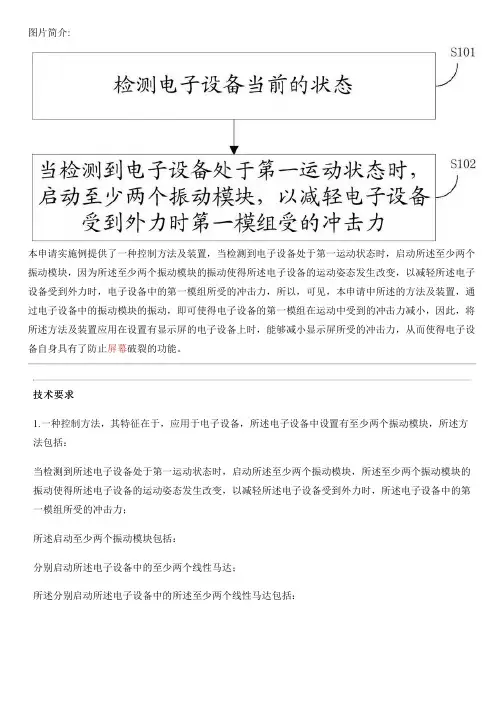
图片简介:本申请实施例提供了一种控制方法及装置,当检测到电子设备处于第一运动状态时,启动所述至少两个振动模块,因为所述至少两个振动模块的振动使得所述电子设备的运动姿态发生改变,以减轻所述电子设备受到外力时,电子设备中的第一模组所受的冲击力,所以,可见,本申请中所述的方法及装置,通过电子设备中的振动模块的振动,即可使得电子设备的第一模组在运动中受到的冲击力减小,因此,将所述方法及装置应用在设置有显示屏的电子设备上时,能够减小显示屏所受的冲击力,从而使得电子设备自身具有了防止屏幕破裂的功能。
技术要求1.一种控制方法,其特征在于,应用于电子设备,所述电子设备中设置有至少两个振动模块,所述方法包括:当检测到所述电子设备处于第一运动状态时,启动所述至少两个振动模块,所述至少两个振动模块的振动使得所述电子设备的运动姿态发生改变,以减轻所述电子设备受到外力时,所述电子设备中的第一模组所受的冲击力;所述启动至少两个振动模块包括:分别启动所述电子设备中的至少两个线性马达;所述分别启动所述电子设备中的所述至少两个线性马达包括:以第一初始相位启动所述电子设备中的第一线性马达,以第二初始相位启动所述电子设备中的第二线性马达,第一线性马达与第二线性马达对称地设置在电子设备的两端,所述第一初始相位与所述第二初始相位之差为180度,所述第一初始相位与所述第二初始相位之差使得两个线性马达的振动形成第一合力,所述第一合力与重力作用后,使得所述电子设备发生扭转,至少两个线性马达的振动方向与第一平面垂直,所述第一平面为所述第一模组所在的平面。
2.根据权利要求1所述的方法,其特征在于,检测所述电子设备处于所述第一运动状态的方法包括:检测所述电子设备当前的加速度;当所述电子设备当前的加速度大于预设的第一数值时,确定检测到所述电子设备处于所述第一运动状态。
3.根据权利要求2所述的方法,其特征在于,所述当检测到电子设备处于所述第一运动状态时,启动至少两个振动模块,包括:当检测到所述电子设备中第二模组的朝向与当前的加速度的方向在第一角度范围内时,启动至少两个振动模块。
偏振相关干涉测量精度提升
偏振相关干涉测量精度提升偏振相关干涉测量精度提升一、偏振干涉测量技术概述偏振干涉测量技术是一种高精度的光学测量方法,它通过分析光波的偏振状态变化来获取物体的几何和物理特性。
这种技术在精密工程、纳米技术、生物医学成像等领域有着广泛的应用。
偏振干涉测量技术的核心在于利用光波的干涉现象,通过测量光波之间的相位差来确定物体的位移、形状或折射率等参数。
1.1 偏振干涉测量技术原理偏振干涉测量技术基于光的波动性质,特别是偏振光波的干涉。
当两束偏振光波相遇时,它们的电场矢量会相互叠加,形成干涉图样。
这种干涉图样包含了两束光波的相位信息,通过分析这些信息,可以精确地测量物体的几何参数。
偏振干涉测量技术的关键是如何准确地控制和测量光波的偏振状态,以及如何从干涉图样中提取出有用的信息。
1.2 偏振干涉测量技术的应用场景偏振干涉测量技术的应用场景非常广泛,包括但不限于以下几个方面:- 精密工程:用于测量精密机械部件的尺寸和形状,确保制造精度。
- 纳米技术:用于研究和测量纳米尺度的物体,如半导体器件和纳米结构。
- 生物医学成像:用于生物组织和细胞的成像,提供高分辨率的内部结构信息。
- 光学数据存储:用于提高光盘和硬盘的存储密度,通过测量微小的光波变化来读取数据。
二、偏振干涉测量精度提升的挑战偏振干涉测量技术的精度提升面临着多方面的挑战,包括环境干扰、系统误差、光源稳定性等问题。
这些挑战需要通过技术创新和优化来克服,以实现更高精度的测量。
2.1 环境干扰的影响环境因素如温度、湿度、气压的变化会对偏振干涉测量系统产生影响,导致测量误差。
为了减少这些影响,需要对测量系统进行精确的环境控制,或者开发出能够适应环境变化的测量技术。
2.2 系统误差的控制偏振干涉测量系统本身可能存在误差,如光学元件的不完美、光路的不稳定性等。
这些系统误差需要通过精确的校准和补偿来控制,以确保测量结果的准确性。
2.3 光源稳定性的要求光源的稳定性对偏振干涉测量的精度至关重要。
请整理电气控制柜制作的基本流程
请整理电气控制柜制作的基本流程
电气控制柜制作的基本流程如下:
1. 客户需求分析:了解并明确设备的工艺要求和设备的硬件部件。
根据这些需求,选择适合的电气硬件,如PLC、伺服驱动器、变频器、低压电器、直流电源、隔离变压器等,确保它们经济耐用且能满足控制要求。
2. 设计阶段:根据所选的元器件,完成电气原理图的控制图、电气施工图、电气清单、电气外围元件图等。
这些图纸将作为后续制作和安装的基础。
3. 采购与安装:根据图纸和详图购买所需的硬件,并在电气施工图中注明电气柜的尺寸和开口。
接着,按照图纸完成PLC控制柜的安装和接线工作。
4. 编程:在编程过程中,要充分考虑设备运行中可能出现的问题,并通过预先设计的解决方案来解决这些问题,实现程序的多方面性。
每个报警的显示和操作都应完整。
5. 调试:每一套程序都应在现场进行调试。
程序编译后,在编程过程中可能会在现场发生意外情况,需要进行调试和修改。
电机、变频器和伺服驱动器的一些参数也应在负载下进行调试和修改。
完成以上步骤后,电气控制柜的制作流程基本结束。
请注意,具体的制作流程可能会因项目需求和设备类型而有所不同,因此在实际操作中可能需要根据具体情况进行调整。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本技术新型提出了一种电控高精度偏振控制器,包括光纤以及基座,基座上转动安装有第一叶桨及第二叶桨,第一叶桨通过第一转动连接器连接有第一伺服电机,第二叶桨通过第二转动连接器连接有第二伺服电机;基座上设有位于第一伺服电机一侧的第一穿纤座,以及位于第二伺服电机尾端的第二穿纤座;光纤穿过第一穿纤座及第一伺服电机后,于第一叶桨与第二叶桨上进行环绕,并穿过第二伺服电机及第二穿纤座;改善了现有的光纤偏振器采用手动方式调节造成调节精度降低的情况。
技术要求
1.一种电控高精度偏振控制器,包括光纤(1),其特征在于:包括基座(2),所述基座(2)上转动安装有第一叶桨(3)及第二叶桨(4),所述第一叶桨(3)通过第一转动连接器(5)连接有第一伺服电机(6),所述第二叶桨(4)通过第二转动连接器(7)连接有第二伺服电机(8);所述基座(2)上设有位于第一伺服电机(6)一侧的第一穿纤座(9),以及位于第二伺服电机(8)尾端的第二穿纤座(10);所述光纤(1)穿过第一穿纤座(9)及第一伺服电机(6)后,于第一叶桨(3)与第二叶桨(4)上进行环绕,并穿过第二伺服电机(8)及第二穿纤座(10)。
2.根据权利要求1所述的一种电控高精度偏振控制器,其特征在于:所述第一叶桨(3)与第二叶桨(4)之
间的相对夹角范围为0~270°。
3.根据权利要求2所述的一种电控高精度偏振控制器,其特征在于:所述第一叶桨(3)、第二叶桨(4)均包括穿线座(11)以及固接在穿线座(11)上的缠绕盘(12),所述缠绕盘(12)内设有用于缠绕光纤(1)的环形架;所述缠绕盘(12)上还设有可拆卸的压盖(13),所述压盖(13)通过锁紧螺帽(14)锁紧在缠绕盘(12)上。
4.根据权利要求3所述的一种电控高精度偏振控制器,其特征在于:所述光纤(1)于第一叶桨(3)上的缠绕圈数为3圈。
5.根据权利要求3所述的一种电控高精度偏振控制器,其特征在于:所述光纤(1)于第二叶桨(4)上的缠绕圈数为2圈。
6.根据权利要求1~5任意一项所述的一种电控高精度偏振控制器,其特征在于:所述基座(2)包括底板(21),所述底板(21)上间隔设有用于安装第一转动链接器的第一支撑板(22)以及用于安装第二转动链接器的第二支撑板(23);所述底板(21)上设有位于第一支撑板(22)与第二支撑板(23)之间连接支座(24),所述连接支座(24)用于转动连接第一叶桨(3)及第二叶桨(4)。
7.根据权利要求1所述的一种电控高精度偏振控制器,其特征在于:所述第一穿纤座(9)与第二穿纤座(10)均包括固定安装于基座(2)上的支架(15),支架(15)上开设有穿过光纤(1)的半孔,所述支架(15)上安装有用于压紧光纤(1)的压块(16)。
8.根据权利要求7所述的一种电控高精度偏振控制器,其特征在于:所述支架(15)呈“凸”字形结构。
技术说明书
一种电控高精度偏振控制器
技术领域
本技术新型涉及偏振控制器领域,具体涉及一种电控高精度偏振控制器。
背景技术
偏振控制器主要用于控制、改变光的偏振态,可将任意偏振态的输入偏振光转变为输出端制定的偏振状态,采用波片改变光的波长的偏振态。
现有的光纤偏振控制器采用手动方式进行粗略调节造成调节精度降低的情况。
实用新型内容
针对现有技术中所存在的不足,本技术新型提供了一种电控高精度偏振控制器,解决了现有的光纤偏振器采用手动方式调节造成调节精度降低的问题。
为实现上述目的,本技术新型采用了如下的技术方案:
一种电控高精度偏振控制器,包括光纤以及基座,所述基座上转动安装有第一叶桨及第二叶桨,所述第一叶桨通过第一转动连接器连接有第一伺服电机,所述第二叶桨通过第二转动连接器连接有第二伺服电机;所述基座上设有位于第一伺服电机一侧的第一穿纤座,以及位于第二伺服电机尾端的第二穿纤座;所述光纤穿过第一穿纤座及第一伺服电机后,于第一叶桨与第二叶桨上进行环绕,并穿过第二伺服电机及第二穿纤座。
优选的,所述第一叶桨与第二叶桨之间的相对夹角范围为0~270°。
优选的,所述第一叶桨、第二叶桨均包括穿线座以及固接在穿线座上的缠绕盘,所述缠绕盘内设有用于缠绕光纤的环形架;所述缠绕盘上还设有可拆卸的压盖,所述压盖通过锁紧螺帽锁紧在缠绕盘上。
优选的,所述光纤于第一叶桨上的缠绕圈数为3圈。
优选的,所述光纤于第二叶桨上的缠绕圈数为2圈。
优选的,所述基座包括底板,所述底板上间隔设有用于安装第一转动链接器的第一支撑板以及用于安装第二转动链接器的第二支撑板;所述底板上设有位于第一支撑板与第二支撑板之间连接支座,所述连接支座用于转动连接第一叶桨及第二叶桨。
优选的,所述第一穿纤座与第二穿纤座均包括固定安装于基座上的支架,支架上开设有穿过光纤的半孔,所述支架上安装有用于压紧光纤的压块。
优选的,所述支架呈“凸”字形结构。
相比于现有技术,本技术新型具有如下有益效果:
通过第一伺服电机带动第一叶桨偏摆、通过第二伺服电机带动第二叶桨偏摆后使得第一叶桨与第二叶桨之间的光纤根据相对夹角而受到不同应力,从而产生不同的偏振效果,形成了无极调节过程,提高了调节精度;在无极调节过程中能够满足应用设备对光偏振态需求。
附图说明
图1为本技术新型一种实施例的结构示意图;
图2为本技术新型一种实施例的俯视结构示意图;
图中,光纤1、基座2、底板21、第一支撑板22、第二支撑板23、连接支座24、第一叶桨3、第二叶桨4、第一转动连接器5、第一伺服电机6、第二转动连接器7、第二伺服电机8、第一穿纤座9、第二穿纤座10、穿线座11、缠绕盘12、压盖13、锁紧螺帽14、支架15、压块16。
具体实施方式
下面结合附图和具体实施例对本技术新型作进一步说明,以使本领域的技术人员可以更好地理解本技术新型并能予以实施,但所举实施例不作为对本技术新型的限定。
如图1~图2所示,本技术新型提出了一种电控高精度偏振控制器,包括光纤1以及基座2,在基座2上转动安装有第一叶桨3及第二叶桨4,所述第一叶桨3通过第一转动连接器5连接有第一伺服电机6,所述第二叶桨4通过第二转动连接器7连接有第二伺服电机8;所述基座2上设有位于第一伺服电机6一侧的第一穿纤座9,以及位于第二伺服电机8尾端的第二穿纤座10;所述光纤1穿过第一穿纤座9及第一伺服电机6后,于第一叶桨3与第二叶桨4上进行环绕,并穿过第二伺服电机8及第二穿纤座10;通过第一穿纤座9与第二穿纤座10对光纤1的位置进行定位后,在第一伺服电机6带动第一叶桨3偏摆,第二伺服电机8带动第二叶桨4偏摆,让第一叶桨3、第二叶桨4之间的光纤1受到应力变化产生无极变化的偏振效果,从而满足应用设备想要获得的光偏振态,以满足应用设备在补偿、图像处理或者偏振损耗测量的需求。
其中第一伺服电机6、第二伺服电机8均采用现有型号SUMTOR-28HS3306B4K-01-JWL;而第一转动连接器5、第二转动连接器7均为中空管状结构,便于光纤1穿过。
为了保证在第一叶桨3、第二叶桨4偏摆过程中对光纤1的应力变化起到合理控制,让第一叶桨3与第二叶桨4之间的相对夹角范围为0~270°,以保证光纤1在此偏摆范围内能够产生稳定的偏振效果,确保调节精度。
同时为了便于光纤1在第一叶桨3、第二叶桨4上进行环绕并能在偏摆过程中让光纤1保持稳定,让第一叶桨3、第二叶桨4均包括穿线座11以及固接在穿线座11上的缠绕盘12,缠绕盘12内设有用于缠绕光纤1的环形架;所述缠绕盘12上还设有可拆卸的压盖13,所述压盖13通过锁紧螺帽14锁紧在缠绕盘12上,从而便于光纤1经过穿线座11进入到缠绕盘12后在环形架上进行缠绕后再通过穿线座11穿出,而压盖13能够避免光纤1从环形架上滑出。
为了调节第一叶桨3、第二叶桨4对光纤1的应力变化范围,让光纤1于第一叶桨3上的缠绕圈数为3圈,并让光纤1于第二叶桨4上的缠绕圈数为2圈。
同时为了合理安装零部件,对基座2的结构进行合理优化设计,让基座2包括底板21,所述底板21上间隔设有用于安装第一转动链接器的第一支撑板22以及用于安装第二转动链接器的第二支撑板23;所述底板21上设有位于第一支撑板22与第二支撑板23之间连接支座24,所述连接支座24用于转动连接第一叶桨3及第二叶桨4;通过合理设计第一支撑板22、第二支撑板23以及连接支座24的位置让各个零部件的连接更加紧密,保证光纤1穿过各个零部件的紧密性;而第一支撑板22对第一伺服电机6、第一叶桨3进行安装支撑,第二支撑板23对第二伺服电机8、第二叶桨4进行安装支撑。
通过第一穿纤座9对光纤1穿入位置进行限位,并通过第二穿纤座10对光纤1穿出位置进行限位,为了便于调节光纤1穿过的张紧效果,让第一穿纤座9与第二穿纤座10均包括固定安装于基座2的支架15,支架15具体固定安装在底板21上,并在支架15上开设有穿过光纤1的半孔,并在支架15上安装有用于压紧光纤1的压块16,其中压块16通过螺钉锁紧于支架15上,对压块16的松紧进行调节实现光纤1的张紧调节。
其中,支架15呈“凸”字形结构,便于在底板21上进行安装。
本技术新型的解释中,需要说明的是,术语“第一”、“第二”等仅是为了便于描述和理解,并非对具体技术特征的安装顺序、使用数量或重要程度进行限定。
最后说明的是,以上实施例仅用以说明本技术新型的技术方案而非限制,尽管参照较佳实施例对本技术新型进行了详细说明,本领域的普通技术人员应当理解,可以对本技术新型的技术方案进行修改或者等同替换,而不脱离本技术新型技术方案的宗旨和范围,其均应涵盖在本技术新型的权利要求范围当中。