SPI时序分析和基础知识总结
SPI详解

APB总线读时序
从机必须 在ENABLE 周期的上 升沿送出 数据,总 线上数据 的采样发 生在 ENABLE周 期的下一 个周期的 上升沿。
Register Definition
• 在SPI接口中共有四个寄存器地址???(为 什么这么说)
– spcr ( serial peripheral interface control register) 控制 寄存器 – spscr(serial peripheral interface state and control register)状态寄存器 – treg(transmit register)数据发送寄存器 – rreg( receive register)数据接收寄存器 共用一个地址 – shift移位寄存器 – sper (serial peripheral interface extension register) 可 扩展寄存器
Bandwidth 8 8
paddr b00 b 01
8 8 8
b 10 b 10 b 11
spcr
spie spe reserved(0) spmstr cpol cpha spr[1] spr[0]
• • • • • • •
默认值8’h14 spie: SPI interrupt enable bit, 为1时才可以发起中断。 spe: SPI enable bit, 为1时才能工作。 spmstr: SPI master mode bit, 为1时为master 模式。 cpol: clock polarity bit,0,空闲时mater时钟为0;1,为1。 cpha: clock phase(一会我们看时序图) spr: SPI clock rate bit, spr[1:0] decides 串行发送时钟是主时钟的几倍 (周期)
SPI总线信号质量及完整性的检测方法与规范
SPI总线信号质量及完整性的检测方法与规范概述SPI(Serial Peripheral Interface)总线是一种常用的串行通信协议,用于在微控制器和外部设备之间传输数据。
为了确保SPI总线的正常工作,需要对其信号质量和完整性进行检测。
本文档将介绍SPI总线信号质量和完整性的检测方法与规范。
信号质量检测方法为了评估SPI总线信号的质量,可以采用以下方法:1. 时序分析:通过使用示波器或逻辑分析仪,捕捉SPI总线上的波形,并分析时钟信号、数据信号和使能信号之间的时序关系。
通过检查信号的上升时间、下降时间、稳定性和幅度等参数,可以评估信号的质量。
2. 噪声分析:使用频谱分析仪或噪声分析仪,检测SPI总线上的噪声水平。
噪声可能来自于电源线、地线、邻近信号线或其他干扰源。
通过分析噪声的频谱特征,可以确定是否存在噪声问题,并采取相应的措施进行抑制。
3. 眼图分析:通过使用高速示波器,捕捉SPI总线上的多个数据传输周期,并绘制眼图。
眼图可以显示信号的稳定性和噪声干扰情况,从而评估信号的质量。
通过调整信号的驱动能力、阻抗匹配和布线等措施,可以改善信号的质量。
完整性检测方法为了确保SPI总线数据的完整性,可以采用以下方法:1. 数据校验:在SPI总线上进行数据传输时,可以使用CRC (循环冗余校验)或其他校验算法对数据进行校验。
接收端可以通过计算接收到的数据的校验值,与发送端发送的校验值进行比较,以验证数据的完整性。
2. 电气特性检测:通过检测SPI总线上的电平、噪声和干扰情况,可以评估数据传输的完整性。
例如,检测信号的上升时间和下降时间是否在规定范围内,检测信号的幅度是否稳定等。
3. 容错设计:在设计SPI总线的系统时,可以采用容错技术,以提高数据传输的完整性。
例如,增加冗余数据、使用纠错码等方法,可以在一定程度上纠正传输过程中的错误。
规范要求为了确保SPI总线信号的质量和数据的完整性,应遵循以下规范要求:1. 时序规范:定义SPI总线上时钟信号、数据信号和使能信号的时序要求,包括上升时间、下降时间、保持时间等。
SPI时钟极性与时钟相位关系根本剖析

SPI时钟极性与时钟相位关系根本剖析----2011年11月21日有感而发⑴时钟极性:SCK空闲状态为低电平(时钟周期中第一个时钟沿也为低电平)①时钟相位:数据采样从第一个时钟沿开始1、如果MSB先发送,则MOSI空闲状态与最高位相同2、如果LSB先发送,则MOSI空闲状态与最低位相同②时钟相位:数据采样从第二个时钟沿开始1、如果MSB先发送,则MOSI空闲状态与最低位相同2、如果LSB先发送,则MOSI空闲状态与最高位相同⑴时钟极性:SCK空闲状态为高电平(时钟周期中第一个时钟沿也为高电平)①时钟相位:数据采样从第一个时钟沿开始1、如果MSB先发送,则MOSI空闲状态与最高位相同2、如果LSB先发送,则MOSI空闲状态与最低位相同②时钟相位:数据采样从第二个时钟沿开始1、如果MSB先发送,则MOSI空闲状态与最低位相同2、如果LSB先发送,则MOSI空闲状态与最高位相同2011年12月3日理解更本质如果CPOL = 0,且CPHA = 0,则一个时钟周期是先低电平,再高电平如果CPOL = 0,且CPHA = 1,则一个时钟周期是先高电平,再低电平如果CPOL = 1,且CPHA = 0,则一个时钟周期是先高电平,再低电平如果CPOL = 1,且CPHA = 1,则一个时钟周期是先低电平,再高电平上述简而言之就是:CPHA = 0,时钟周期第一个沿与空闲状态相同,CPHA = 1,时钟周期第一个沿与空闲状态相反。
如下图所示:网友言论:SPI总线小结SPI接口的全称是"Serial Peripheral Interface",意为串行外围接口,是Motorola首先在其MC68HCXX系列处理器上定义的。
SPI接口主要应用在EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
SPI接口是在CPU和外围低速器件之间进行同步串行数据传输,在主器件的移位脉冲下,数据按位传输,高位在前,地位在后,为全双工通信,数据传输速度总体来说比I2C总线要快,速度可达到几Mbps。
I2CSPI总线原理总结

IIC总线原理1 起始和终止都按时序图写他们的程序。
开始电平(建立>4.7us) 下降沿或上升沿(保持>4us) 之后电平(scl=0:为接受下一个数据做准备)2对于不带回值得函数,应当定义为void类型,在此函数体中不得出现Return语句。
void I2cStart() 起始信号的模拟{SDA=1; 初始条件,强制Delay10us(); >4.7usSCL=1; 初始条件,建立时间使SDA保持时间>4.7usDelay10us();//建立时间是SDA保持时间>4.7usSDA=0;Delay10us();//保持时间是>4usSCL=0;Delay10us();起始信号:在SCL时钟信号在高电平期间SDA信号产生一个下降沿起始之后SDA和SCL都为02 void I2cStop() 由主控制器(有CPU的:单片机)主动建立的{SDA=0;Delay10us();SCL=1;Delay10us();//建立时间大于4.7usSDA=1;Delay10us();}终止信号:在SCL时钟信号高电平期间SDA信号产生一个上升沿结束之后保持SDA和SCL都为1;表示总线空闲void Pcf8591SendByte(unsigned char channel){I2cStart();I2cSendByte(WRITEADDR);//发送写器件地址I2cSendByte(0x40|channel);//发送控制寄存器I2cStop();}在开始和停止条件之间从发送机传输到接收机的数据字节数是没有限制的一个主控能控制信号的传输和时钟频率。
如单片机置位和复位SDA和SCL来产生发送或接收数据的脉冲。
单片机令SDA=1时,释放数据SDA,让别的器件来控制SDA启动与停止数据传输时:单片机令SCL=0,是为下一个数据的传送做准备。
SCL=1时,SDA要保持1或0不变,因为此时接收器正在读取数据SCL=0时,允许SDA的电平发送改变,此时接收器不读取SDA上的数据总线上每传送一位数据都有一个时钟脉冲与之对应(同步控制)主控器给被控器发送应答信号子函数中:哪里有Return语句,哪里就是此函数的结束。
LPC2103 SPI硬件端口模式时序图
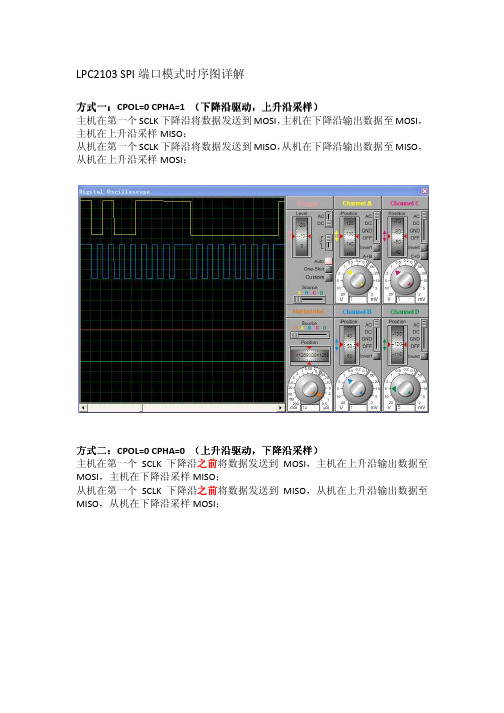
LPC2103 SPI 端口模式时序图详解
方式一方式一::CPOL=0 CPHA=1 (下降沿驱动下降沿驱动,,上升沿采样上升沿采样))
主机在第一个SCLK 下降沿将数据发送到MOSI ,主机在下降沿输出数据至MOSI ,主机在上升沿采样MISO ;
从机在第一个SCLK 下降沿将数据发送到MISO ,从机在下降沿输出数据至MISO ,从机在上升沿采样MOSI ;
方式二方式二::CPOL=0 CPHA=0 (上升沿驱动上升沿驱动,,下降下降沿采样沿采样沿采样))
主机在第一个SCLK 下降沿之前将数据发送到MOSI ,主机在上升沿输出数据至MOSI ,主机在下降沿采样MISO ;
从机在第一个SCLK 下降沿之前将数据发送到MISO ,从机在上升沿输出数据至MISO ,从机在下降沿采样MOSI ;
方式三方式三::CPOL=1 CPHA=0 (下降沿驱动下降沿驱动,,上升沿采样上升沿采样))
主机在第一个SCLK 上升沿之前将数据发送到MOSI ,主机在下降沿输出数据至MOSI ,主机在上升沿采样MISO ;
从机在第一个SCLK 上升沿之前将数据发送到MISO ,从机在下降沿输出数据至MISO ,从机在上升沿采样MOSI ;
方式四方式四::CPOL=1 CPHA=1(上升沿驱动上升沿驱动,,下降沿采样下降沿采样))
主机在第一个SCLK 上升沿将数据发送到MOSI ,主机在上升沿输出数据至MOSI ,主机在下降沿采样MISO ;
从机在第一个SCLK 上升沿将数据发送到MISO ,从机在上升沿输出数据至MISO ,从机在下降沿采样MOSI ;。
SPI协议详解

SPI协议详解SPI(Serial Peripheral Interface)总线是⼀种⾼速、串⾏、全双⼯通信总线,由Motorola公司设计并推⼴。
优点是⽀持全双⼯通信,传输速率快,SCLK时钟频率最⾼可以达到50MHz左右。
缺点是没有流控制机制,不像I2C有应答机制,也不像UART有数据帧校验机制。
总线引脚SPI总线以主从⽅式⼯作,⽀持多主多从、单主多从、单主单从模式,拥有四个信号线:MISO – Master Input Slave Output,主设备数据输⼊,从设备数据输出;MOSI – Master Output Slave Input,主设备数据输出,从设备数据输⼊;SCLK – Serial Clock,时钟信号,由主设备产⽣;需要注意的是,SCLK只有在数据传输的过程中产⽣时钟周期,不进⾏数据传输时保持⾼电平或者低电平;CS – Chip Select,从设备使能信号,由主设备控制。
其中CS信号线主要⽤于⽚选,实际通信使⽤MISO/MOSI/SCLK三根信号线。
单主单从模式如下:单主多从模式如下:(每个SPI设备由⼀根独⽴的CS⽚选信号进⾏⽚选)总线时序根据CPOL(时钟极性)和CPHA(时钟相位)的组合区分,SPI总线时序有四种模式。
SPI通信的双⽅必须同时⼯作在其中⼀种模式下,往往是主控制器匹配SPI设备的⼯作模式。
Mode0:CPOL=0,CPHA=0Mode1:CPOL=0,CPHA=1Mode2:CPOL=1,CPHA=0Mode3:CPOL=1,CPHA=1其中SPI 0和SPI 3两种模式最常⽤。
CPOL⽤来控制SCLK信号的Active状态是⾼电平还是低电平。
0 - SCLK⾼电平为Active状态1 - SCLK低电平为Active状态CPHA⽤来控制MOSI和MISO在第⼏个SCLK边沿进⾏数据采样。
0 - 第⼀个SCLK边沿采样,第⼆个边沿发送1 - 第⼀个SCLK边沿发送,第⼆个边沿采样总结:SPI总线协议本⾝并不复杂,这就意味着复杂性在SPI设备驱动的软件编码上,具体体现在:1)SPI总线协议没有数据校验机制,因此,必须根据SPI设备⽀持的SCLK时钟频率范围设置SPI时钟频率,实际应⽤中,可能会碰到⽰波器量时序信号没问题,但是SPI设备不回复数据或者回复数据错误的情况,⼤概率就是因为时钟频率不满⾜SPI设备要求导致的;2)SPI控制器的发送是直接将数据写⼊⼀个移位寄存器中,该移位寄存器跟随SCLK时钟发送数据;SPI控制器的接收与发送同步进⾏,也就是说发送数据的同时,也在接收数据,⽽接收数据是写⼊⼀个缓存寄存器中,如果缓存寄存器的值不及时读取的话,后续接收的数据会直接丢弃⽽不是覆盖到该缓存寄存器中,因此,每⼀次写数据之后,⼀定要读取数据,即使读取的数据⽆意义。
SPI总线小结
SPI总线小结
SPI 接口的全称是”Serial Peripheral Interface”,意为串行外围接口,是Motorola 首先在其MC68HCXX 系列处理器上定义的。
SPI 接口主要应用在EEPROM,FLASH,实时时钟,AD 转换器,还有数字信号处理器和数字信号解码器之间。
SPI 接口是在CPU 和外围低速器件之间进行同步串行数据传输,在主器件的移位脉冲下,数据按位传输,高位在前,地位在后,为全双工通信,数据传输速度总体来说比I2C 总线要快,速度可达到几Mbps。
1、SPI 总线主要特点
- 全双工;
- 可以当作主机或从机工作;
- 提供频率可编程时钟;
- 发送结束中断标志;
- 写冲突保护;
2、接口定义
该总线通信基于主-从配置。
它有以下4 个信号:
MOSI:Master Out Slave In 主出/从入
MISO:Master In Slave Out 主入/从出
SCK:Serial Clock 串行时钟
SS:Slave Select 从属选择
芯片上从属选择(slave-select)的引脚数决定了可连到总线上的器件数量。
3、SPI 时序分析
在SPI 传输中,数据是同步进行发送和接收的。
数据传输的时钟基于来自主处理器的时钟脉冲,摩托罗拉没有定义任何通用SPI 的时钟规范。
然而,最常。
SPI协议解析
SPI定义一、SPI是英文Software Process Improvement的缩写,中文意思是软件过程的改进。
它是CMM(还有其他能力模型)中的一个重要概念,CMM模型的目的就是要改进一个组织的过程,提高过程能力,所以叫做SPI-软件过程改进。
二、SPI是英文Service Provider Interface的缩写。
中文意思是服务提供商接口。
满足某种服务标准的供应商提供的符合该标准的应用程序接口,SPI应该和该服务的API标准是兼容的,应用程序一般应该是基于API编写,除非是SPI中包含AP I中没有提供的功能而又必须使用。
三、SPI是英文Serial Peripheral Interface的缩写,中文意思是串行外围设备接口,SPI是Motorola公司推出的一种同步串行通讯方式,是一种三线同步总线,因其硬件功能很强,与SPI有关的软件就相当简单,使CPU有更多的时间处理其他事务。
四、SPI是英文Single Program Initiation的缩写。
中文意思是单个程序启动。
SPI概述SPI:高速同步串行口。
3~4线接口,收发独立、可同步进行.SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。
是Motorola首先在其MC68HCXX系列处理器上定义的。
SPI接口主要应用在EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,比如AT91RM920 0.SPI总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。
外围设置FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。
SPI通信的总结
STM32---SPI通信的总结(库函数操作)本文要紧由7项内容介绍SPI并会在最后附上测试源码供参考:1.SPI的通信协议2.SPI通信初始化(以STM32为从机,LPC1114为主机介绍)3.SPI的读写函数4.SPI的中断配置5.SPI的SMA操作6.测试源码7.易显现的问题及缘故和解决方式一、SPI的通信协议SPI(Serial Peripheral Interface)是一种串行同步通信协议,由一个主设备和一个或多个从设备组成,主设备启动一个与从设备的同步通信,从而完成数据的互换。
SPI 接口一样由4根线组成,CS片选信号(有的单片机上也称为NSS),SCLK时钟信号线,MISO数据线(主机输入从机输出),MOSI数据线(主机输出从机输入),CS 决定了唯一的与主设备通信的从设备,如没有CS 信号,那么只能存在一个从设备,主设备通过产生移位时钟信号来发起通信。
通信时主机的数据由MISO 输入,由MOSI 输出,输入的数据在时钟的上升或下降沿被采样,输出数据在紧接着的下降或上升沿被发出(具体由SPI的时钟相位和极性的设置而决定)。
二、以STM32为例介绍SPI通信1.STM32f103 带有3个SPI模块其特性如下:2SPI 初始化初始化SPI 主若是对SPI要利用到的引脚和SPI通信协议中时钟相位和极性进行设置,其实STM32的工程师已经帮咱们做好了这写工作,挪用库函数,依照自己的需要来修改其中的参量来完成自己的配置即可,要紧的配置是如下几项:引脚的配置SPI1的SCLK, MISO ,MOSI别离是PA5,PA6,PA7引脚,这几个引脚的模式都配置成GPIO_Mode_AF_PP 复用推挽输出(关于GPIO的8种工作模式如不清楚请自己百度,在此不说明),若是是单主单从,CS引脚能够不配置,都设置成软件模式即可。
通信参数的设置1.SPI_Direction_2Lines_FullDuplex把SPI设置成全双工通信;2.在SPI_Mode 里设置你的模式(主机或从机),3.SPI_DataSize是来设置数据传输的帧格式的SPI_DataSize_8b是指8位数据帧格式,也能够设置为SPI_DataSize_16b,即16位帧格式4.SPI_CPOL和SPI_CPHA是两个很重要的参数,是设置SPI通信时钟的极性和相位的,一共有四种模式在库函数中 CPOL有两个值SPI_CPOL_High(=1)和SPI_CPOL_Low ( =0). CPHA有两个值SPI_CPHA_1Edge (=0) 和SPI_CPHA_2Edge(=1)CPOL表示时钟在空闲状态的极性是高电平仍是低电平,而CPHA那么表示数据是在什么时刻被采样的,手册中如下:我的程序中主、从机的这两位设置的相同都是设置成1,即空闲不时钟是高电平,数据再第二个时钟沿被采样,实验显示数据收发都正常。
数字电路时序分析
数字电路时序分析数字电路时序分析是指对数字电路中各个信号的时序关系进行分析和处理的过程。
在现代电子设备中,数字电路扮演着至关重要的角色。
了解数字电路的时序分析能够帮助我们有效地设计和优化电子设备,提高其性能和可靠性。
一、时序和时钟信号时序是指在数字电路中各个信号按照一定的时间顺序发生和传递的规则。
时序信号是指用来控制和同步数字电路中各个元件操作和数据传输的信号。
其中,时钟信号是最核心的时序信号,它在数字电路中起到非常重要的作用。
时钟信号确定了数字电路中各个时刻的起点和终点,决定了元件的状态和信号的传输。
二、时序分析的基本概念1. 时序图:时序图是用来描述数字电路中各个信号之间的时间关系和传输顺序的图形工具。
通过时序图,我们可以清楚地了解各个信号之间的关系,从而进行分析和调试。
2. 时序约束:时序约束是指在设计数字电路时,对其时序性能提出的要求,包括最大延迟、最小延迟、时钟频率等等。
时序约束的严格满足与否直接影响着电路的正确性和可靠性。
3. 时序敏感路径:时序敏感路径是指数字电路中传输延迟最长的路径。
在时序分析中,我们需要特别关注这些路径,确保其传输时间满足时序约束。
4. 时序错误:时序错误是指由于信号传输延迟、时钟频率等因素导致的数字电路功能上的错误。
通过时序分析,我们可以及时发现和排除这些错误,提高电路的可靠性和性能。
三、时序分析的方法和工具1. 时间图分析:时间图是时序分析中最基本的工具之一。
通过绘制信号的时序波形图,我们可以更直观地观察各个信号之间的时间关系,进而进行分析。
2. 逻辑仿真:逻辑仿真是一种通过计算机模拟数字电路的运行过程,以验证其时序性能的方法。
通过逻辑仿真,我们可以模拟不同的输入条件和时钟频率,分析电路的输出是否满足要求。
3. 时序约束验证:时序约束验证是通过使用专业的时序验证工具,对设计的数字电路进行时序约束的验证。
这些工具可以帮助我们全面、准确地分析电路的时序特性,提高设计的可靠性和性能。