基于改进粒子群算法的函数优化
合集下载
基于改进粒子群算法的工程项目综合优化
( P O)w spo oe vi tepe a r h nmeo eP Oagrh uigeo t n y HS S a rp sdt aod h rm t ep e o n no t S l i m d r vl i .B o u fh ot n uo
usn h ta e y o ub o lto ir r h i g t e sr tg f s p pua in h e ac y,t e lo ih c n i r v h o v r e c s e n h ag rt m a mp o e t e c n e g n e pe d a d
ac rc.F rtesn ei o t i t n o acnt ci r et ahma cl pi zt n m dl cuay o h yt s pi z i f o s ut npo c,m te t a o t a o o e h s m ao r o j i mi i s a dam l.bet eo t i t nm dl f o s ci m .cs a dq ai eeet l hd na n ut ojc v pi z i o e o nt t nt e ot n u lyw r s bi e .I i i m ao c r o i u t a s
中 图分 类 号 : 2 09 文 献标 志 码 : A
S nh s t z t nfrCo sr cin P oet ae n y tei Opi ai o n tu t rjc sd o s mi o o B
M o fe ril wa m p i ia i n Al o ih di d Pa tce S r O tm z to g rt m i
法采用 多子群分层策 略 , 以提高收敛速度和优化精度. 为求 解工程项 目的综合优化 问题 , 建立 了工期一 成本一 质量 的数学优化模型 和多 目标优化模型 . 过实例对 标准粒 子群 优化算 法 ( P O) 通 S S 和差分 进化 ( E 算 法进行 了比 D ) 较, 并采用 H P O算法进行多 目标优 化. 后 , SS 最 用枚举 法验证 了模 型 的合 理性 和算法 的有效 性. 已有 研究相 与 比, S S H P O算法能在种群规模较小 (0个粒子 ) 2 的情况下 , 快速找到满意的解 ( 平均迭代次数不超过 2 0次 ) . 关键词 : 粒子群优化算法 ; 目管理 ; 目标 项 多
基于随机点摆动前行模式的改进粒子群优化算法

径 向取样 数 越大 , 搜索 越细致 , 速度 亦慢 。选取 但 不 宜过 大 , 亦 不 宜 过 小 , 根 据 具 体 问题 和 寻优 但 应
要求 而定 。 ( ) 算初 始取 样点 集 P 。 4计 设 当前 点 ( 观察 所 在点 ) : 为
P : ( , , , ) … 。
⑥
2 1 SiT c. nr. 0 c eh E gg 1 .
计 算 机 技 术
基 于 随 机 点 摆 动 前 行模 式 的 改 进 粒 子 群 优 化 算法
王 兴元 张 鹏
( 山东 大 学管 理 学 院 , 南 2 0 0 ) 济 5 10
摘
要
基于飞鸟寻食细致化仿 生, 出了一种新 的基于 随机 点摆 动前行模 式 ( S M) 改进 粒子群 算法 原理 , 提 RF 的 设计 了改进 粒子群算法 T 13 P8 ; 改进粒 子群 算法 文献标 志码 飞鸟寻食 A 随机点摆 动前行模 式( S M) RF 算法
粒子群算法流程 , 利用 算例 展示 了该算法 的具体使用方 法与计算效果。 并 关键词
中图法分类号
为 了解 决 复 杂 非 线 性 和 多 维 空 间 全 局 寻 优 问 题 , 多 学者 对 粒 子 群 算 法 进 行 了改 进 , 要 包 括 许 主
初始 解 的优化 J公式 参数 的优化 J公式 形 式 的 、 、 优化 ]粒 子 群 体 划 分 以及 不 同粒 子 群 或 不 同层 、 次粒子 群 之 间通 讯 的 优 化 J 。粒 子 群 算 法 优 异 的 性 能来 自于其仿 生 学基 础 , 由于 目前 对 粒 子 群 算 但 法 的改 进 缺少 细致 化 仿 生基 础 , 因而 改进 效 果 并 不 改进 算法 不 沿 用 经 典 算 法 ¨ , 而是 在 细致 化 仿 生基 础 上 提 出新 的 优 化 算 法 。该 算 法 通 过 飞 鸟
基于改进粒子群算法的渡槽结构优化设计

譬 =
+C 1pe k— )+ 2 (b t 一 ) ( ) l (b t r s CI ge : " s 2 1
现 J 前, 。 。目 粒子群算法在连续变量优化问题求解中应用较
多, 而对其应用 于求解 非 连续 变 量 问题 的研 究 相对 较 少 。然 而, 在工程优化设计 中经常会遇到整型变 量或离散 变量 的非连
粒子群优化算法 ( atl S a p mzt n 简称 P O) P rc w r O t i i , ie m i ao S 是
的最优位置为全局极值ge ̄ bt 在第k 1 so + 次迭代中, 粒子P按
照如下两式来更新 自身 的速度和位置 … :
K ne y E ehr在 19 end 和 brat 9 5年 提 出的一种模 拟群 体智 能行为 的 自适应概率优化技术… , 其原理简单 、 易理 解 、 容 易于编程实
基金项目 : 华北水利水 电学院青年科研基金资助项 目( S J0 80 ) H Q 20 0 4 。 作者 简介 : 周娟( 9 8 ) 女 , 17 一 , 河南郑州人 , 讲师 , 硕士 , 主要从 事结构优化设计
一
譬 屹 + 1 ( ek ) C 2 b t一 k 4 = Cl bt— rp s + 2 ( e: )() rg s 2 2 适 应度 函数 的改进 .
适应度 函数是评价粒子质量及指 导寻优方 向的关 键 , 因此
收稿 日期 : 0 — 8 3 2 9 0- 1 0
个是整个粒子群 中所有 粒子在 历代 搜索 过程 中所达 到的最
有较好的适 用性 , 而且程序运行 可靠, 全局收敛能力强。
关 键 词 :渡槽 ;改进粒子群算法 ;适应函数 ;动态罚函数 文献标识码 : A di1.9 9 ji n 10 o:0 36 /.s .0 0—17  ̄00 0 .5 s 39 2 1 .30 4 中图分类号 :T 6 2 V7
基于改进粒子群算法的地区电网无功/电压实时优化控制
进 行 动态 分段 。根据 计算 出 的启 动增 量控 制优 化程
高, 地区电网无功/ 电压实时优化控制作为保证电网 安全 、经济运行和优质供电重要而有效 的手段 日益 受 到重 视 。无 功/ 实 时优 化 中 , 电压 变压 器 档位 与 补 偿电容器 以整数形式表示 ,而发电机端电压以实数 形式表示 , 是典型的非线性混合整数优化问题。 处理 此 类 问题通 常 有 两类 方法 : 为 解 析法 『 包 括梯 度 一 1 1 , 法、 线性规划、 二次规划和内点法等。这些传统优化 算法简单且求解速度快 , 但是需要依靠问题 的凸性
‘ _ _ _
关键词 : 区电网; 地 无功, 电压控制 ; 改进粒子群算法 ; 增量启动策略 ; 模糊控制成本
中图分类号 :M 1 T 71
_ _ - ^ ~ ● - _ _ _ _ _ _ _
文献标识码 : A
^ _ ● _ ^ _ _ _
-
‘
_
文章编号 :64 00 (0 7 0 — 0 2 0 17 — 0 9 20 )6 0 2 — 6
_ _ _ - _ ^ ● ^ ^ _ _ _ - ● - ~ _ - ^ ● _ - _ - - ● ^ - _ ● - _ v
-
●
_
-
-
^
‘ ● ● _ ● _ _ ^ _ _
法 的可 行性 和有 效 性 。
统不存在可行解时, 这些算法不能保证收敛。 二为进 化算法[ 包括遗传算法 、 2 1 , 进化规划 、 进化策略等 , 克
服 了解析 法 的上述 缺点 ,但其 求解 时 问过 长和 易 于 早熟 收敛 K ney brat 提 出 的种 群 智能 end和E ehr 教授 进 化 算 法 —— 粒 子 群 算 法 (at l w r Prce am i S
高, 地区电网无功/ 电压实时优化控制作为保证电网 安全 、经济运行和优质供电重要而有效 的手段 日益 受 到重 视 。无 功/ 实 时优 化 中 , 电压 变压 器 档位 与 补 偿电容器 以整数形式表示 ,而发电机端电压以实数 形式表示 , 是典型的非线性混合整数优化问题。 处理 此 类 问题通 常 有 两类 方法 : 为 解 析法 『 包 括梯 度 一 1 1 , 法、 线性规划、 二次规划和内点法等。这些传统优化 算法简单且求解速度快 , 但是需要依靠问题 的凸性
‘ _ _ _
关键词 : 区电网; 地 无功, 电压控制 ; 改进粒子群算法 ; 增量启动策略 ; 模糊控制成本
中图分类号 :M 1 T 71
_ _ - ^ ~ ● - _ _ _ _ _ _ _
文献标识码 : A
^ _ ● _ ^ _ _ _
-
‘
_
文章编号 :64 00 (0 7 0 — 0 2 0 17 — 0 9 20 )6 0 2 — 6
_ _ _ - _ ^ ● ^ ^ _ _ _ - ● - ~ _ - ^ ● _ - _ - - ● ^ - _ ● - _ v
-
●
_
-
-
^
‘ ● ● _ ● _ _ ^ _ _
法 的可 行性 和有 效 性 。
统不存在可行解时, 这些算法不能保证收敛。 二为进 化算法[ 包括遗传算法 、 2 1 , 进化规划 、 进化策略等 , 克
服 了解析 法 的上述 缺点 ,但其 求解 时 问过 长和 易 于 早熟 收敛 K ney brat 提 出 的种 群 智能 end和E ehr 教授 进 化 算 法 —— 粒 子 群 算 法 (at l w r Prce am i S
基于改进粒子群算法的盘式制动器优化设计
下会产生变形 ,因而其气膜压力和气膜厚度分布与传统的刚性
轴承表面有所不同。
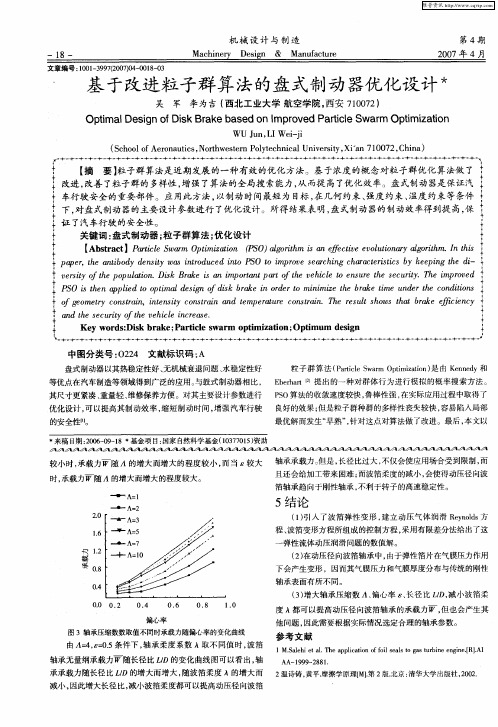
() 3 增大轴承压缩数 A、 偏心率 s 长 径 比 LD, 、 I 减小波箔柔 度 A都可 以提高动压径 向波箔轴承 的承载力 , 但也会产生其
偏况选定合理 的轴承参数。
维普资讯
第4 期
吴 军等: 基于改进粒子群算法的盘式制动器优化设计
一l 9一
制动时间最短 为 目标 , 在几何约束 、 强度约束 、 温度约束等条件
在盘式制动器设计 优化模型 中将包含设计变量 、 初始参数 、
三类变量或参数 , 为便于建立数学模 型及公式导 出, 下, 对盘式制动器 的主要设计参数 ( : 如 制动盘的直径 、 衬片的直 物理常量 , 。 径、 高压油油压等 6个设计变量 ) 进行 了优化设计 , 取得 了满意 先将这些变量或参数列于表 1 的效果 。
盘式制动器由制动盘和制动钳机构组成。 制动时 , 缸筒 中的
活 塞
高压 油 推 动 活 塞 , 进
而推动衬 片与制 动盘 发生摩擦 ,将 汽车动 能转 化为制 动盘 的内
制动时间较短则汽车的安全性较 高,因此本文选择制动时间最
短作为设计 目标 。 盘式制动器 的结构剖 面图如 图 2所示。如果将
图 3轴承压缩数数取值不 同时承载力随偏心率 的变化 曲线
参考 文献
1M. lh t 1T ea pi t no isas ogs ubn n ieR . S ei . h p lai fol elt a rieegn _ 】 a ea c o f t I AI
AA—l 9 — 8 . 9 9 2 81
中图分类 号 : 24 文献标 识码 : 02 A
基于改进的粒子群算法的风力机叶片优化设计
设 计计 算
试 验 研究
风 力机 叶 片优 化 设 计 基 矛 改进 的粒 子群 算 法的
杨从新 , 张 钊
( 兰 州 理 工 大 学 甘 肃 省风 力 机 工 程 技 术 研 究 中心 , 甘肃 兰州 7 3 0 0 5 0 )
摘 要 : 基 于有 限 叶 片变环 量 气动计 算模 型 , 加入 攻 角随 风速 的变化 处 理 , 根 据 风 电场 中来流 速度 的
gr a m de s i g ne d b y u s i ng i mp r o ve d PSO a l gor i t hm , de s i gne d t he bl a de of 1 . 3 MW wi nd t ur bi ne, a n d c om p a r e d wi t h a n e xi s t i ng 1 .3 M W wi nd t ur bi ne . The r e s ul t s s howe d t ha t a f t e r op t i mi z a t i on, c ho r d l e ng t hs of wi nd t ur bie s ha r pl y, po we r ou t p ut a t s p e c i f i e d wi nd s p e e d s a t i s f i e d t he p owe r out p ut c on t r ol r e q ui r e me n t o f c o ns t a nt bl a d e d i s t a n c e wi nd t ur bi ne, whi c h ve r i f i e d t he va l i d i t y a nd f u nc t i on al i t i e s of t he o pt i mi z at i o n mo de 1 . Ke y wo r d s: wi nd t ur bi ne, c o ns t a nt — pi t c h, opt i ma l de s i gn, i m pr ov e d p a r t i c a l s wa r m op t i mi z a t i o n
试 验 研究
风 力机 叶 片优 化 设 计 基 矛 改进 的粒 子群 算 法的
杨从新 , 张 钊
( 兰 州 理 工 大 学 甘 肃 省风 力 机 工 程 技 术 研 究 中心 , 甘肃 兰州 7 3 0 0 5 0 )
摘 要 : 基 于有 限 叶 片变环 量 气动计 算模 型 , 加入 攻 角随 风速 的变化 处 理 , 根 据 风 电场 中来流 速度 的
gr a m de s i g ne d b y u s i ng i mp r o ve d PSO a l gor i t hm , de s i gne d t he bl a de of 1 . 3 MW wi nd t ur bi ne, a n d c om p a r e d wi t h a n e xi s t i ng 1 .3 M W wi nd t ur bi ne . The r e s ul t s s howe d t ha t a f t e r op t i mi z a t i on, c ho r d l e ng t hs of wi nd t ur bie s ha r pl y, po we r ou t p ut a t s p e c i f i e d wi nd s p e e d s a t i s f i e d t he p owe r out p ut c on t r ol r e q ui r e me n t o f c o ns t a nt bl a d e d i s t a n c e wi nd t ur bi ne, whi c h ve r i f i e d t he va l i d i t y a nd f u nc t i on al i t i e s of t he o pt i mi z at i o n mo de 1 . Ke y wo r d s: wi nd t ur bi ne, c o ns t a nt — pi t c h, opt i ma l de s i gn, i m pr ov e d p a r t i c a l s wa r m op t i mi z a t i o n
基于动态特性的改进粒子群优化算法
.
p o f r t no t ep rils s ac igs a ewa b ie , eo t z t n rgo f h WaT y a c l arwe i n r ri o mai f h at e ’ e rhn p c so t n d t p i ai e ino teS ln d n mial n ro d o c a h mi o y a d t ee ce c fteo t z t n Wa mp o e . m p r o tde r o ef rte L n h f in y o pi a o s i rv d Co a s n s iswee d n o h DW - S a d te po o e i h mi i i u P O n h r p sd m eh d 11 x e me tle ut r e l sc le tu cin r v ee e t e e so tei p o e lo tm to . 1ee p r na s l f nca ia s fn t sp o et f ci n s fh rv dag r h i r so t s t o h v m i
作为一种基于迭代的优化算法, 为了改善其总体优
化性能, 提高其迭代速度和优化精度,防止其陷入局部
,
o t iain p o lms a d t e bid e s o at l e r hn e om a c a m p o e at l WalIo t z t n p i z t rb e n h l n s fp ri e sa c ig p r r n e n i rv d p ri e s r pi a o m o n c f c T mi i
.
Ke r s s r o t ia in; p ril w am p i iai n; n i h o h o o g e ywo d : wa m p i z t m o a t es r o tm z to c eg b r o dr u hs t
p o f r t no t ep rils s ac igs a ewa b ie , eo t z t n rgo f h WaT y a c l arwe i n r ri o mai f h at e ’ e rhn p c so t n d t p i ai e ino teS ln d n mial n ro d o c a h mi o y a d t ee ce c fteo t z t n Wa mp o e . m p r o tde r o ef rte L n h f in y o pi a o s i rv d Co a s n s iswee d n o h DW - S a d te po o e i h mi i i u P O n h r p sd m eh d 11 x e me tle ut r e l sc le tu cin r v ee e t e e so tei p o e lo tm to . 1ee p r na s l f nca ia s fn t sp o et f ci n s fh rv dag r h i r so t s t o h v m i
作为一种基于迭代的优化算法, 为了改善其总体优
化性能, 提高其迭代速度和优化精度,防止其陷入局部
,
o t iain p o lms a d t e bid e s o at l e r hn e om a c a m p o e at l WalIo t z t n p i z t rb e n h l n s fp ri e sa c ig p r r n e n i rv d p ri e s r pi a o m o n c f c T mi i
.
Ke r s s r o t ia in; p ril w am p i iai n; n i h o h o o g e ywo d : wa m p i z t m o a t es r o tm z to c eg b r o dr u hs t
基于Alopex改进的粒子群优化算法
( )引言 一
粒子群优化算法是一类基 于群智能 的随机优化算法 。 因受 到人工生命的研 究结果启发 , E e h n博士和 K n e y博士 bra end
= × + r d)(. 4)cxad)( ̄- w qa ( p - +2 r ( p 4) () n x n x 1
= d + ( 2)
算法优于基本的 P O算法 。 S
( )基本 的 P 0算法 二 S
E e h n 士 和 K n e y 士 最 初 的 目的 是 在二 维 空 间 建 bra 博 e nd 博
迭代 中止 条件 根据 具体 问题一般选为最大迭代 次数或 ( 和) 粒子群迄今 为止搜索到 的最优位置满足预定最 小适应 阈值 。 基本P O S 算法需要用 户确定 的参数并不 多而且操作简单, 故使用 比较方便但是它 的缺点是易 陷人局部极小点 , 索精度 搜 不高 , 因此有必要对其作改进 。 文献 [] 究了惯性 因子w 优 2研 对 化性能 的影响 , 发现较大的值有利于跳 出局部极小点,而较 小 的值有利于算法收敛 , 因此提 出了 自适应调整的策略即随着 迭 代的进行 ,线性地减dw , 的值 。实验表 明这种 改进 通过 自适应 调整惯性因子,能兼顾搜 索效率和搜索精度 , 故优化性 能有所
粒子 i个体最好位置 p e t的第 d维分量; P 表示群体最 bs
好位 置 g e t的第 d维 分 量 ;C,C表 示 权 重 因 子 ;r n (表 bs ad) 示 随机 函 数 , 产 生 [, 1 的 随机 数 ;w表 示 惯 性 权重 函数 。 0 ]
P O算 法的主要缺 点是易 陷入局部极 小点 。一些 改进 的 S P O算法存在着较复杂、不便使用 的缺点 ,该文提 出一类新颖 S 的 P O算法 , S 它既保持了 P O算 法结构简单 的特点 , S 同时又融 合 了 A o e ,从 而帮助算法摆脱局部极小点的束缚,提高非 lp x 线性优化 的精度 。 比实验 结果 说明该文所提 出的改进型 P O 对 S
基于改进粒子群算法的Hammerstein模型辨识
me h d to .
[ ywo d ]ss m e ti t n prce Wa lo t zt nag r m; e ct tt n Ha Ke r s yt i nic i ; at lS ll pi ai loi e d fao i T mi o h t v l i muai ; mmes i d l o y o rt nmo e e
2 粒子 群优化 算法
21 一般粒 子群优化算法 . P O是粒子在解空 间追随最优的粒子进行搜索 ,与其他 S
进化寻优算法相类似,P O算法 也通过个体之间的协作与竞 S 争 ,实现 多维空 间中最优解的搜索Байду номын сангаас。它首先生成初始种群 ,
1 概述
随着社会 的发展进步 ,越来越多的非线性和非线性系统 已经 引起了人们的广泛重视 。目前 已经在社会科学和 自然科 学领域投入相当的人力 和物力去观察、研 究有 关的非线性问 题 I。非线性模型 的表达式 比较复杂 ,现在还很少有人研究 “
各 种表 达 式 之 间 是 否 存 在 等效 关 系 。 由于 目前 尚缺 少 描 述 各
r a t s n t pi a o v rp mee s a e a h at l wam O t aec s a u cin o t z t n o e a a t p c , d teP r ceS r pi z t n P O) sa o t ov eo t z t n po lm. f o mi i r r n i mia o ( S i d pe t s let pi ai rb e i do h mi o I r e n a c ep r r n eo eP O ie tiain fte l aVe ct Muain P r ceS am t z t n P O n o d r O e h n e t ef ma c ft S d n i c t a r , l i tt at l w r Opi ai ( S VM)i a p i o t h o h f o h y o y o i mi o s p l d t e
[ ywo d ]ss m e ti t n prce Wa lo t zt nag r m; e ct tt n Ha Ke r s yt i nic i ; at lS ll pi ai loi e d fao i T mi o h t v l i muai ; mmes i d l o y o rt nmo e e
2 粒子 群优化 算法
21 一般粒 子群优化算法 . P O是粒子在解空 间追随最优的粒子进行搜索 ,与其他 S
进化寻优算法相类似,P O算法 也通过个体之间的协作与竞 S 争 ,实现 多维空 间中最优解的搜索Байду номын сангаас。它首先生成初始种群 ,
1 概述
随着社会 的发展进步 ,越来越多的非线性和非线性系统 已经 引起了人们的广泛重视 。目前 已经在社会科学和 自然科 学领域投入相当的人力 和物力去观察、研 究有 关的非线性问 题 I。非线性模型 的表达式 比较复杂 ,现在还很少有人研究 “
各 种表 达 式 之 间 是 否 存 在 等效 关 系 。 由于 目前 尚缺 少 描 述 各
r a t s n t pi a o v rp mee s a e a h at l wam O t aec s a u cin o t z t n o e a a t p c , d teP r ceS r pi z t n P O) sa o t ov eo t z t n po lm. f o mi i r r n i mia o ( S i d pe t s let pi ai rb e i do h mi o I r e n a c ep r r n eo eP O ie tiain fte l aVe ct Muain P r ceS am t z t n P O n o d r O e h n e t ef ma c ft S d n i c t a r , l i tt at l w r Opi ai ( S VM)i a p i o t h o h f o h y o y o i mi o s p l d t e
基于改进粒子群算法的配电网无功优化的研究
表示粒子的优劣 , 然后通过迭代找到最优解. 在每
一
=
次迭代 中, 粒子 所经历 的历史最好位置记为 P ( P … , , ,肼) 而整个 种群搜 索到 的最 P , P … p ,
, p ) 在 …, .
优位置可表示为 p =( , 2 加 P P , g
找到个体最优解和群体最优解后 , 粒子根据以下两 个公 式来更 新 速度 和位置 .
局部极 值附近 的粒子 都变 成不 活动粒 子时 , 算法就
会陷入局部最优, 出现早熟现象. 所以, 对不活动粒 子施加 扰动或 对不 活 动粒 子 重 新 初 始 化可 以提高 本算法的搜索能力, 避免陷入局部最优. 如果粒子 i
与粒 子 g 的位 置差 △ 在给定 范 围 =0 0 1 F, .0 内出 现 =4 次 时 , 可定 义粒子 为不活动 粒子. . 则 △
济寿命年限
2 2 约束条 件 .
式中 v 为节点 i j 的电压幅值 , Q 第 台发电机的无
功 出力 , 第 台发 电机 的端 电压 , 第 k台变 压 器 的变 比 , C 第 台可投 切 电容器 的补偿容 量.
2. 平 束 . 1 衡约 条件’ 2
3 改进粒子群算法的无功优化流程图
状态变 量 :
i
无功优化数学模型包括技术 目标和经济 目 , 标 本 文 以年运行 费用为无 功优 化 的 目标 函数 :
n
Mn i F=K × f × +[ ( × c ] o P 丁 ∑ Q C) 0 i
f 1 :
≤ ≤ V ( m i= 12 … , ) , , n
82 5
佳 木 斯 大 学 学 报 (自 然 科 学 版 )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
£)∑xx [00最 值 的 峰 函 。 ( x = -,】 小 为0 单 值 数 ,∈ 22 ,
() c a e 函数 2 Sh f r f x=可i ( 2 ) s 2 ̄ ( n 丽
算 机科 学 , 0 ,69: 42 5 2 93 () 2 —4 . 0 2
[]基 于 小生境 的极性 P O 多 目标优化及 应 用 [] 5 S J.自动 化与仪 表,
( n n iesyo S i c n eh ooy L oa g 7 0 3 Henn Hea v rt f ce e d cn lg , u y n 10 , n a) Un i n a T 4
【Abt c s a t】 T v i e rbe o p e tr o v re c n o r c ua yi t e o . e ia z dp r o p r c s u - r oa o t o l dhp m f r ma ec n eg n e dp o c rc l e p r d ri t l e at f at l r u a a nar i nii ie d
2 1 , : ・ 8 0 08 454 . 1
05X [ 0 0, 小 值 为 0的 ) .,i - , 】最 22
-
[】一 种 基 于 量 子 行 为 的 改 进 粒 子 群 算 法 [】 算 机 工 程 与 应 用 , 6 J.计 2 0 ,33 ) 99 . 0 7 (6: —1 4 8
shr 数 p ee函
【 .rc6hItS mp s m iMir c iea dH ma cec A] o t n y oi Ol coMahn n u n Sine P u [] gy ,9 53 —3 C . o a19 .94 . Na
[]h E eh r R. df d prce s r o t zrC】nIE 3S iY,b rat A mo ie at l wam pi e [ . : E i i mi I E
本 文提 出的改 进算法 中,位 置和速 度更 新 公式仍 然与
P O相 同。 S
31 部分粒子 的位置随机变化 . 由于粒子群算法对于多峰值 函数 空间的优化容 易早熟收
敛, 每次迭代搜索时, 使适应值最差 的部分粒子 的位置在搜索 空间中重 新随机分布 , 这样就改善 了部分粒子 的位置值 , 保持
部 分
子 群
19 9 5年发 明的一种基 于群智能 的进化计算技 术I1 l, I 来源 于对 2 鸟群捕食 的行 为研究 。 后来 si h 等人翻 引入惯性权 重, 形成了当
前的标准版本 。 S P O的优势在于概念简单, 容易实现并且没有 许多参数 需要调整 。因此, 该算法很快应用 于神经 网络 、 目 多
到最优解 。在每 一次迭代 中, 粒子通过跟踪两爪‘ ‘ 极值 ” 更新 来
自己。 第一个就是粒子本 身所找到 的最优解。 这个叫做个体极 值, 记为 P。另一个极值是整个种群 目前找到的最优解 。这个 极值是全局极值, 记为 P。 设搜索 空问为 D 维 ,总粒子数 为 n ,第 i 个粒 子表 示为 Xrxl …, ; i = |X , x 第 个粒子 的历史最优位置记为 P ( P , ( , 尸 p
速度等 因素影响 , 粒子会在全局 最优 点附近摆动 , 却不 能到 达 到全局最优点。考虑到此时粒子距离最优点 已经很近 了, 因此 应该进行小步长的变异 。使最优粒子位置做出变异, 了能做 除 进一步搜索之外, 还可 以引导其它粒子作搜索。位置变异公式
如下 : P 一) , c i ( 脚rP P 1 ( )
对标准的 P O算法主要进行了 3 S 个方面的改进 ,大大改 善 了粒子种群 的多样性 , 增强了优 化性 能的稳定性 , 较好地解 决 了算法的早熟收敛和后期搜索精度较低 的缺 点。实验证明, 改进后 的算法达到了预期 的 目的 。
参考文献 :
[] n e yJ brat .at l m2 pi zt n [ . o E t ai A] rcI E I o mi o P E n C n o Ne rl t rs ] et, 9 . 4 —9 8 o f n ua Ne k [ . r 1 51 214 . wo C P h 9 9
Se3更 新 粒 子 的个 体 极 值 ; t : p
标优化[ 函数优化 [ 5 ] 、 6 1 等问题。作为一种 高效的全 局优 化算 法,
P O可用于求解大量非线性、不可微和多峰值的复杂函数优 S
化问题 。为了提高算法 的优化效率 , 近几年 出现了很多改进 的 P O算法, 已经应用于许多科学和工程领域 。 S 并且 然而 , 当遇到
子速度记 为 V=v , …, 。则对 于每一代, (.v , v . 每个 粒子的位 置根据如下方程变化:
v vv+ 1r (i i C r ( x i 宰ic l P-d 2 2 p d * d ) * X+
x iv d +
公式 中 是 D维的位 置向量 ,hlk ) prnk ) ci ( 和 ae t( , d
3 .改 进 的 粒 子群 算 法 ( S ) MP O
对于这些 问题 ,许 多人做 了大量 的工作来 改进 算法 的性 质, 比如从参数的控制角度 出发 , 以结合其它 算法 来增强算 可 法的效率 。本文提出了一种改进的粒子群算法 , 通过不断随机 初始化部分适 应值 较差 的粒 子的位置 ,个 体历史最优粒子做
多峰值 函数 。 实验 中两种 算法 的群 体规模 为 3 ,惯性 权重 w 的值从 0 11 . 线性递减到 03 c c 2 第一个 函数 为 1 , .,1 2 , == 0维 第二个 函数
为2 。 维
算 法迭代次数 为 10 0 0次,取平 均适应值 和平均迭 代次 数。结果如表 1 :
62 7
47 2
48 3
23 5
F n t nOp i iainBa e nI r v dP r ceS am t z t n u ci t z t s do o m o mp o e at l w r Op i ai i mi o
C e n gn QiYo g Ni n i hn Yo g ag u n uDame
W o l ng e s n Co utto l n e l e c ,9 :9— 3 rd Co r s mp a i na t li n e 1 98 6 7 . o I g
[] 于 扩 展 的 TS模 型 的 P O神 经 网络 在 故 障 诊 断 中 的 应 用 [] 4基 - S J. 计
ig t e s a c i g p o e si a o t d Cr s o e t t n i u e o p mu p rilsa dr n o v rai n o r u p i l a t lsi n e r hn r c s d p e . o s v r h s mu ai s s d f ro t m a t e n d m ai t f o p o t o i c a o g ma r c e p i s u e mal a g . h i lt n e p rme t n iae a o ae t e sa d r S ag r h , h mp o e S a g rt m sd i s lrn e T es n mu a i x e o i n d c t st tc mp r d wi t t n a d P O l o t m t e i r v d P O l o h i h h h i i
速度 超过 用户 设定 的 v ,那么 这 一维 的速度 就 被设 定为
V , V ∈[ ~ V眦 。 一 即 . V ]
P O算法基本 步骤如下 : S Se l随机初始化粒子种群 , t : p 即初 始化种群 中所有粒子 的 速度和位置( 可行解) ; Se2根据适应度 函数对粒子种群进 行评价 ; t : p
一
6 5—
蒹 藩 研 究 33 对群体最优粒子进行小范围位置变异 . 从表 中 的指 标上 看 ,改进 的算法 MP O 都优 于标 准 的 S P O, S 且求解精度优势 明显优 于标准 P O, 明了改进算 法的 S 说 有效性 。
5 结论 .
P O算法 的一个不足之处在于在算法运行的后期 ,受 到 S
其 中 P 的适应值 比较接近 ,可在个体历史最优群体中 前 1%的个体 中随机选取一个 。r为随机整数,4 0 3 1是介于[,】 " 01 之 间的随机数。 算法中 对采取保序策略 , 一个变量保存最 用
优 的 P, 保证算法得 到的最优解 。
4 .仿 真 结 果及 其 分 析
…
对历 史个体最优粒子之 间进行两两杂 交,这个 杂交概率 由一个随机数 确定,与粒 子的适应度没有 关系。在每次迭代 中, 所有 的个体最优粒子进行随机的两两杂交 , 产生同样数 目 的孩 子粒 子,并用孩子粒子代替父母粒子作 为个体 最优 粒子
来引导粒子 的运动 。孩子粒子 的位置 由父母粒 子的位置的算
某些具有较 多局部极值 点的搜索空 间时 ,S P O算法 的搜 索效 率可 能会突 然大大 降低 并且在最 优 点附近 的搜索 效率 也不
高。
Se4更新粒子的群体极值 ; t : p Se5根据式() 2进行速度和位 置的迭代; t : p 1和()
Se6 ̄复 Se2 Se5直到满足算法停止迭代的条件。 t : p t  ̄ tp , p
表 1 仿 真 结 果
适应度平均值
函数
PS 0 M PS 0
平均迭代 次数
P S0 M P O S
s h r p ee
s h fe ca r
28 4 * 09 .0 6 1 -
一 .9 5 09 4 1