基于神经网络进行图像识别的嵌入式监控设备
基于卷积神经网络的图像处理技术研究
基于卷积神经网络的图像处理技术研究图像处理技术是目前智能化发展的重要组成部分。
其主要通过对图像进行分析、识别、处理等一系列操作,来获取有用信息,帮助人们更好的进行决策。
而其中的卷积神经网络(CNN)则成为了图像处理技术中最为重要的一部分。
卷积神经网络是一种强大的图像处理技术,它通过学习和训练大量的数据来自动提取图像中的特征,并对图像进行分类、识别和分割等操作,因此在目标检测、人脸识别等领域发挥着重要的作用。
接下来,我们将从以下几个方面对基于卷积神经网络的图像处理技术进行研究。
一、卷积神经网络的基本结构卷积神经网络的基本结构由多个卷积层、池化层、全连接层等组成。
其中卷积层主要用来提取特征,池化层用来降维,全连接层用来做最终的分类。
在卷积神经网络中,对图像进行卷积操作是核心步骤。
卷积操作通过使用一组大小固定的卷积核,对原图的每个像素进行计算,得出新的图像特征,从而实现对图像特征的提取。
而池化层则通过缩小卷积特征图的尺寸,且保留主要特征信息,来减少网络的参数量,提高网络的鲁棒性和泛化能力。
全连接层则是卷积神经网络中的最后一层,它将卷积层和池化层提取好的特征进行分类,输出结果。
由于特征的提取已经在前面的层次中完成,因此全连接层的主要作用是输出对应的分类标签。
二、基于卷积神经网络的图像分类基于卷积神经网络的图像分类,可以分为传统的单尺度CNN 和新型的多尺度CNN两种。
单尺度CNN通过不同深度的卷积层和池化层来对图片进行特征提取,并通过全连接层将结果分类。
其最大的问题是无法处理不同尺度的输入图片,因此从单尺度CNN出发,提出了新型多尺度CNN。
多尺度CNN是指将图像分成几个不同的尺度,然后将不同尺度的图像输入到不同的卷积层,使得不同尺度的特征能够在一个网络中学习到更好的表示。
而这种方法能更好的改善单尺度CNN 无法处理不同尺度图片的问题。
三、基于卷积神经网络的图像处理技术基于卷积神经网络的图像处理技术包括目标检测、图像分割、人脸识别等。
基于深度学习卷积神经网络图像识别技术的研究与应用
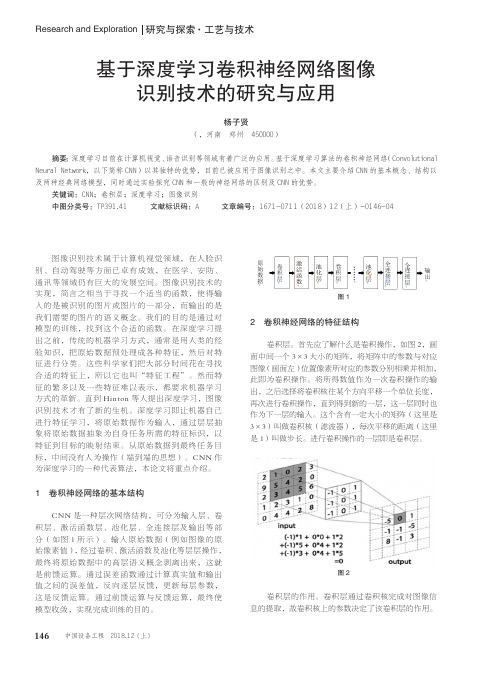
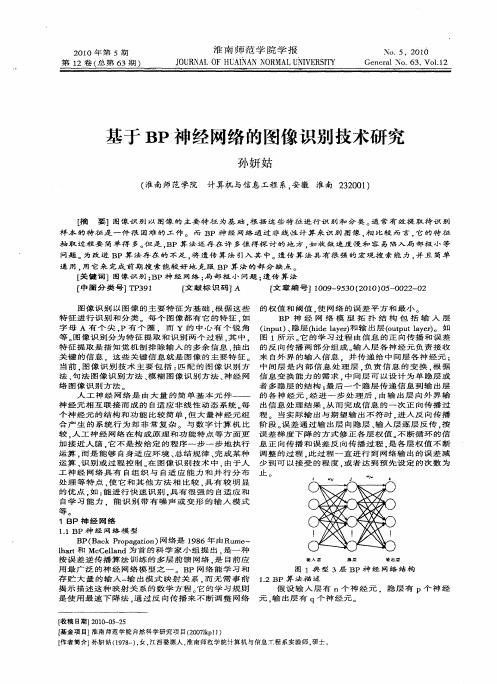
CNN 是一种层次网络结构,可分为输入层、卷 积层、激活函数层、池化层、全连接层及输出等部 分(如图 1 所示)。输入原始数据(例如图像的原 始 像 素 值 ),经 过 卷 积 、激 活 函 数 及 池 化 等 层 层 操 作 , 最终将原始数据中的高层语义概念剥离出来,这就 是前馈运算。通过误差函数通过计算真实值和输出 值之间的误差值,反向逐层反馈,更新每层参数, 这是反馈运算。通过前馈运算与反馈运算,最终使 模型收敛,实现完成训练的目的。
图2 卷积层的作用。卷积层通过卷积核完成对图像信 息的提取,故卷积核上的参数决定了该卷积层的作用。
China 中国 Plant 设备
Engineering 工程
例如有一种边缘滤波器
,当该滤波器作
用于图片中物体的边缘时,那么边缘和其四周的像素值
差异应比较大。如果作用该滤波器,那么边缘四周像素
值差异小的部分就会被消除,而差异较大的部分就被凸
146 中国设备工程 2018.12 ( 上 )
图1
2 卷积神经网络的特征结构
卷积层。首先应了解什么是卷积操作,如图 2,画 面中间一个 3×3 大小的矩阵,将矩阵中的参数与对应 图像(画面左)位置像素所对应的参数分别相乘并相加, 此即为卷积操作。将所得数值作为一次卷积操作的输 出,之后选择将卷积核往某个方向平移一个单位长度, 再次进行卷积操作,直到得到新的一层,这一层同时也 作为下一层的输入。这个含有一定大小的矩阵(这里是 3×3)叫做卷积核(滤波器),每次平移的距离(这里 是 1)叫做步长。进行卷积操作的一层即是卷积层。
Research and Exploration 研究与探索·工艺与技术
基于深度学习卷积神经网络图像 识别技术的研究与应用
基于卷积神经网络的车型识别

中图分类号:U491.53
文献标识码:A
文章编号:1674-9944(2021) 12-0233-03
1引言
为了应对全球能源危机,降低能源消耗,提高公共 设施利用效率,建设新型智慧城市成为城市发展的重要 方向。路灯是一个城市基础设施的重要组成部分 ,也是 城镇居民生活中不可缺少的一部分智慧城市建设 速度不断加快,涉及的内容也很多,其中智能路灯的建 设及其管理体系的建立与应用尤为重要 。目前,大部分 城市的路灯都是人工管理,路灯发生故障时不能及时准 确定位检修,需要人工逐个排查,造成资源上的浪费。 利用物联网和人工智能技术的智能路灯系统已经成为 国内外研究的热点领域。目前常用的路灯控制方法与 路灯智能控制相比,存在管理落后、滞后性严重、精度 低、工作效果差的缺点。对于这些缺点要及时处理,因 此本课题研发以型号为STC89C52单片机为基础的路 灯智能管控系统旳。
最大值,并将其整合到输出特征图y中。 2.4 CNN的连接功能
激活功能,经典relu函数的图形(图1)和公式 如下:
Relu^x) = 1
(4)
Io,兀 w o
该函数是分段函数在y小于等于0时/(0)始终为
零,当y值为正值时『(0)成正比例函数。
2.5 损失函数
损失函数选择在CNN中起着重要的作用。损失函
终的识别率有着直接的关系。如表3。
表3卷积层数和移动平均模型对精确度的影响
网络
培训准确性/%
测试精度/%
网络1
100
85.6
网络2
100
90.4
网络3
100
93・5
在不变的参数设置下,第一种和第二种网络分别采 用的卷积层是2个5层、3个6层,表中明显看出第二种 网络的测试准确率更高。所以适当的在不增加逻辑计 算难度的条件下适当的增加卷积层个数能够提升测试 的准确率。
基于深度学习的图像识别技术在物联网中的应用
基于深度学习的图像识别技术在物联网中的应用物联网(IoT)作为未来的发展趋势,呈现了广泛的应用场景,涉及各个行业。
其中,图像识别技术是物联网中的重要技术之一。
随着图像识别技术不断发展,基于深度学习的图像识别技术正成为物联网中的热门应用之一。
一、基于深度学习的图像识别技术概述深度学习是一种模拟人脑神经网络的计算机技术,可以自动化地学习数据,构建自适应算法。
基于深度学习的图像识别技术,通过构建深度神经网络(DNN)模型,实现对图像数据进行分析和理解,并输出对图像的识别结果。
深度学习的图像识别技术主要包括卷积神经网络(CNN)和循环神经网络(RNN)两种类型。
其中,CNN主要用于静态图像的识别,而RNN主要用于动态图像的识别。
二、基于深度学习的图像识别技术在物联网中的应用1、智能家居在智能家居中,基于深度学习的图像识别技术可以用于识别人体、物体等信息。
通过在家中安装摄像头,可以对家庭成员进行监控,实现智能识别,如识别家庭成员的身份、识别来访的客人。
此外,可以通过识别物体信息,实现智能家电控制,如通过识别手中的遥控器,自动打开电视等设备。
2、智能城市在智能城市中,基于深度学习的图像识别技术可以用于交通、安全等方面。
如通过识别汽车信息,监测交通拥堵情况,实现智能调度。
通过识别行人、车辆等信息,实现智能交通灯控制,提高交通效率。
此外,可以通过识别安全事件,如火灾、盗窃等,实现智能预警。
3、智能环保在智能环保中,基于深度学习的图像识别技术可以用于污染物的监测和处理。
通过识别污染物信息,实现智能监测和预测。
通过深度学习和控制算法的结合,实现智能处理和排放控制,并且提高环境保护的效率。
三、基于深度学习的图像识别技术的问题和挑战1、数据采集和处理难度大基于深度学习的图像识别技术,对于数据的数量和质量都有较高要求。
首先,需要收集大量的图像数据,并对数据进行处理和清洗。
其次,需要专业的开发人员进行算法优化,从而提高模型的准确性和稳定性。
基于k210实现目标自动追踪系统的基本方案

基于k210实现目标自动追踪系统的基本方案基于k210实现目标自动追踪系统的基本方案1. 方案概述•通过基于k210芯片开发的目标自动追踪系统,实现对指定目标的实时追踪和位置识别。
•利用k210芯片的高性能、低功耗等特点,以及其内置的神经网络算法,提高追踪系统的精确度和响应速度。
2. 方案流程1.目标检测:–使用k210内置的神经网络算法,对图像进行目标检测,提取出目标区域。
–确定目标的位置坐标和特征信息。
2.目标追踪:–通过目标检测的结果,在连续的视频帧中跟踪目标的位置和运动轨迹。
–根据目标的速度和方向,预测目标下一时刻的位置。
3.位置识别:–利用k210芯片提供的图像处理功能,对目标区域进行特征识别和匹配。
–通过匹配算法,将目标的位置映射到特定的场景或地图上。
4.输出结果:–将目标的位置和识别结果通过串口或网络接口输出,以供后续处理和应用。
3. 方案特点•高性能:k210芯片搭载的神经网络算法和图像处理功能,能够实时进行目标检测和追踪,提高系统的响应速度。
•低功耗:k210芯片采用了低功耗设计,在保证性能的同时,延长了系统的使用时间。
•精确度高:通过提取目标的特征信息和利用匹配算法,能够准确地识别目标的位置和身份。
•扩展性强:k210芯片支持外部接口,可以与其他设备进行连接,实现更多的应用场景。
4. 应用领域•安防监控:用于实时监测和跟踪指定区域内的可疑目标,提供及时的报警和预警功能。
•机器人导航:用于机器人自主导航和避障,实现对指定目标的精确追踪和识别。
•无人驾驶:用于自动驾驶系统中的目标检测和追踪,提高车辆行驶的安全性和可靠性。
•工业制造:用于物料追踪和生产线控制,提高生产效率和质量。
5. 方案优势•硬件成本低:k210芯片具有性能强大的同时,价格相对较低,降低了系统的成本。
•系统稳定性好:k210芯片经过严格的测试和验证,具有高度的稳定性和可靠性。
•开发简单:k210芯片支持C语言等常用编程语言,开发者可以快速上手,实现系统定制化。
基于遗传神经网络的火灾图像识别及应用

计算机科学 2 0 Vo. 3 Q 1 0 6 13 N . 1
基 于遗传神 经 网络 的火灾图像识别及 应 用
史海 山 吕厚 余 仲 元 红 刘 晓明 。
( 重庆大学电气工程学院 重庆 40 3 ) ( 00 0 重庆大学通信工程学院 重庆 4 03 ) 0 00
t eg n t e r ln t r Ods ig iht ef e h e ei n u a ewo kt itn us h i .Thsi teie ftefr d n iiains se c r i s h ao h ieie tf t y tm. Th e uti idc — d c o ers l s n ia
摘 要 传 统的火 灾检 测方法一般 采用感烟 、 温、 感 感光探测 器以及 红外对射探测 。本文提 出了一种基 于 图像视 觉特
征 的火灾检测方 法 , 根据 火灾火焰处于近红外 波段 的特征 , 集近红 外 图像 , 采 并利 用 火灾初 期火 焰 变化 的各种特 征信
息, 图像处理方法提取这 些特征 值 , 用 并把其 作为输入 , 用遗传神 经 网络 对其进 一步识 别 , 而进行 火 灾判别 , 利 从 并进
d tcin eeto .A ied tcinme h db sd o h iu l h rce so g si p o o e . Aco dn O t ec a a tr f f ee t t o a e n t evs a aa tr fi r o c ma e s r p s d c r igt h h rceso fr g sn a On a fa e ,n a nr rd i g sa ec l ce .An a i gu eo h h n igif r t no h iei ma e e rt e ri r rd e rifae ma e r o l td n e dm k n s ft ec a gn o ma i fte n o
基于人工智能技术的图像识别算法与实现
基于人工智能技术的图像识别算法与实现近年来,随着人工智能技术的迅猛发展,图像识别算法成为了人们关注的焦点之一。
图像识别算法是一种通过计算机对图像进行分析和理解的技术,它可以识别图像中的物体、场景和特征,并将其转化为计算机可以理解的数据,从而实现图像的自动化处理和应用。
一、图像识别算法的基本原理图像识别算法的基本原理是通过对图像进行特征提取和分类来实现的。
特征提取是指从图像中提取出具有代表性的特征,常用的特征包括颜色、纹理、形状等。
分类是指将提取出的特征与预先定义好的模板进行比对,从而确定图像所属的类别。
在这个过程中,人工智能技术发挥了重要作用,主要包括机器学习和深度学习。
机器学习是一种通过训练模型来实现图像识别的方法。
在机器学习中,我们首先需要准备一批已经标注好的图像数据作为训练集,然后利用这些数据训练出一个模型。
这个模型可以根据输入的图像数据,自动学习和提取特征,并对图像进行分类。
常用的机器学习算法包括支持向量机(SVM)、决策树和随机森林等。
深度学习是一种基于神经网络的图像识别算法。
与机器学习不同的是,深度学习可以自动学习和提取特征,无需人工干预。
深度学习的核心是多层神经网络,通过多层网络的连接和权重调整,实现对图像的特征提取和分类。
深度学习在图像识别领域取得了很大的突破,特别是卷积神经网络(CNN)的应用,使得图像识别的准确率大幅提升。
二、图像识别算法的应用图像识别算法在各个领域都有广泛的应用。
在医疗领域,图像识别算法可以帮助医生进行疾病诊断和治疗。
例如,通过对医学影像图像进行分析,可以自动识别出异常的部位和病变,辅助医生进行疾病的诊断和治疗方案的选择。
在交通领域,图像识别算法可以帮助交通管理部门进行交通监控和违法行为的识别。
例如,通过对交通摄像头拍摄的图像进行分析,可以自动识别出交通违法行为,如闯红灯、逆行等,并自动生成相应的处罚单。
在智能家居领域,图像识别算法可以帮助智能设备进行人脸识别和动作识别。
基于BP神经网络的图像识别技术研究
处 理 等 特 点 . 它 和 其 他 方 法 相 比 较 . 有 较 明 显 使 具 的 优 点 . : 进 行 快 速 识 别 , 有 很 强 的 自适 应 和 如 能 具 自学 习 能 力 . 能 识 别 带 有 噪 声 或 变 形 的输 入 模 式 等。
1 BP 神 经 网 络
特 征 提 取 是 指 知 觉 机 制 排 除 输 人 的 多 余 信 息 . 出 抽 关 键 的 信 息 ,这 些 关 键 信 息 就 是 图 像 的 主 要 特 征 。 当 前 . 像 识 别 技 术 主 要 包 括 : 配 的 图 像 识 别 方 图 匹 法 、 法 图 像 识 别 方 法 、 糊 图 像 识 别 方 法 、 经 网 句 模 神
r 图 分 类 号 1 P 9 中 31 T
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于神经网络进行图像识别的嵌入式监控设备
本文在嵌入式设备上实现了一种基于神经网络算法进行数字图像识别的监
控设备。通过嵌入式设备的摄像头采集图像数据,在上位机上进行图像处理后利
用神经网络算法进行训练,然后将训练的神经元参数存入嵌入式设备。系统开始
运行后,实时采集图像数据,通过神经网络进行识别分析,根据识别结果进行控
制操作。此设备价格低廉,携带方便,易于后期扩展,后期会进一步增加通信等
功能,实现采集数据的实时保存。
标签:嵌入式系统;神经网络算法;图像识别;生产监控
一、引言
本单位使用的生产设备大部分从国外进口,均是当时的成熟设备,随着生产
工艺提高的需求,以及客户对品质要求越来越“苛刻”,这些设备逐渐显露出一些
弊端。在生产过程中,产品品质主要受众多设备参数的影响,比如,加工过程中
的温度、电压、电流、真空度、时间等,要获得更高品质的产品,就要严格的控
制这些参数,而控制的前提就是能够“即时获取”。对于这些设备,获取这些信息
往往都是通过员工拿着钟表周期性的人工检查记录,然后再输入计算机进行各种
质量分析,在这一过程中,既耗费了大量的人力,记录和处理的准确性和时效性
也大打折扣。过程信息无法即时获取,无法实时分析控制成为了一个亟待解决的
问题。
我们对这些设备进行了一定程度的改造,加装了数据采集和监控,实现了数
据的实时自动传输、存储、处理、异常示警等,通过对过程数据进行实施后期分
析,为产品品质的提高提供了参考方向。但是对于一些高价值稀缺设备,加装监
控有可能会对设备性能产生影响,甚至可能对设备造成破坏。为实现这类设备的
实时监控,考虑通过不接触设备的图像识别技术将设备显示屏上的图像数据识别
出来,根据识别的数据进行监控处理。最开始笔者考虑使用计算机采集数据并进
行识别处理,这种方式相对简单,开发效率高,但是存在成本高、不易携带、占
用空间等缺点。而嵌入式系统可以完美解决这些问题,因此决定采用嵌入式设备
实现监控功能。
二、系统基本结构及原理
本设备的系统整体框图如下:
本设备分为两个流程,一个图像是数据训练流程,另外一个图像识别流程。
训练流程通过装在嵌入式设备上的摄像头将需要采集的数据采集到嵌入式
设备,并进行简单的图像处理,将处理的数据保存在嵌入式设备,在采集到足够
多的数据之后,在计算机通过神经网络算法进行图像识别训练,训练完成之后将
得到的神经元参数下载到嵌入式设备。
图像识别流程将摄像头采集的数据在嵌入式设备上进行图像处理,然后通过
已经训练好的神经网络进行图像识别,根据识别后的数据进行示警、存储、处理
等操作。
以下对主要的部分加以介绍:
1.嵌入式系统平台和交叉编译环境
本设备处理器使用三星的ARM微处理器S3C2440,软件内核采用
Linux2.6.32.2。计算机主机为Windows 10系统,Linux虚拟机使用Fedora9操作
系统,三者通过网线和串口连接,构成了开发所需要的交叉编译环境。
2.摄像头与图像采集
由于S3C2440自带COMS摄像头引脚,为开发方便,本文使用与微处理器
引脚兼容的OV9650摄像头,摄像头驱动使用了系统自带的摄像头驱动。嵌入式
设备处理程序中通过使用摄像头驱动采集图像数据,在训练流程中,使用开源的
libjpeg软件模块将采集的数据保存为jpg图像。而在识别流程中则直接采集到内
存,在内存中进行后续的图像处理和识别等操作。
3.图像处理
因为采集到的图像数据为16位彩色数据,图像处理首先进行图像灰度化和
二值化处理,将图像变成二值化的数据,然后通过去除噪声、倾斜度调整、字符
切割,将图像数据切割成多个独立的字符,最后将字符进行归一化处理,将字符
图像转换为大小相同的对象,为后续的训练和识别提供素材。
4.神经网络算法
因為本版本只是实现识别0~9共10个阿拉伯数字,功能相对简单,为加快
识别速度,本文采用两层神经网络,即1个隐藏层,一个输出层。隐藏层神经单
元数量采用5个,输出层神经单元数量为10个。在训练过程中,学习率定为0.1,
经过5000次迭代,误差低于0.001,达到较好的识别效果。在训练后,将得到的
神经网络参数下载到嵌入式设备,嵌入式设备在运行时通过相同的神经网络进行
数据计算,实现了图像数据的准确识别。
5.嵌入式处理程序
在处理程序中,实现了数据采集、图像处理、神经网络识别、数据存储、监
控报警等功能,提高工艺监控能力,保证了生产稳定性与可靠性。
三、结束语
本设计最大的特点是嵌入式系统与神经网络相结合,实现了不接触价值高昂
的设备,通过视觉识别采集设备参数,提高了生产的可靠性,为工艺提高提供了
数据支持。实践表明,本设备工作可靠,价格低廉、易于携带,便于后期扩展,
适合各种设备的监控处理。但是也存在一些可以改进的地方,如可以增加英文字
符和汉字的识别功能,增加FPGA进行数据处理以提高图像处理速度,增加网络
通信功能实现数据的分布式保存。笔者会在日后的工作中改进本设备的效率、扩
宽适用环境,为日常生产监控提供一套完整的解决方案。
参考文献:
[1]侯志祥,李河清,张玉萍.《基于神经网络的压力传感器数据融合》传感
器技术 2002(4).
[2]张铁壁,马文华.《振动筒式压力传感器的FLANN非线性校正》微计算
机信息 ,2005(2).
[3]林广宇.《基于嵌入式技术的车载图像监控系统研究》博士论文,长安大
学,2009.
[4]江俊辉.《基于ARM的嵌入式系统硬件设计》 微计算机信息,2005(10).