三角网格的最短路径计算及对其分割
三维delaunay三角剖分算法
《三维delaunay三角剖分算法:深度和广度兼具的全面评估》一、介绍三维Delaunay三角剖分算法,又称无缝三角网格生成算法,是计算几何学中一种重要的算法。
它以点云数据为基础,能够快速高效地生成三维空间中的三角剖分,是计算机图形学、计算机辅助设计等领域中常用的重要工具。
二、算法原理和流程1. 点云数据输入三维Delaunay三角剖分算法的输入是一组点云数据,表示了三维空间中的一些离散点,这些点将作为三角剖分的顶点。
2. 建立三角形网格算法首先通过连接这些离散点,构建初始的三角形网格。
根据一定的规则和约束,逐步优化这个初始网格,使其满足一定的性质和条件。
3. 确定Delaunay性质算法的关键是确定Delaunay性质,即任意一个空间中的点集构成的三角剖分,如果其外接圆不含有其他点,则成为Delaunay三角剖分。
通过不断地优化和调整三角形的位置,使得生成的三角剖分满足Delaunay性质。
4. 输出优化后的三角剖分经过多轮优化和调整后,算法会输出一个高质量的Delaunay三角剖分,这个剖分可以用于计算几何中的相关问题和应用。
三、深度探讨三维Delaunay三角剖分算法1. 算法性能的分析三维Delaunay三角剖分算法的性能主要取决于输入的点云数据的规模和分布。
对于规模较大的数据,算法的运行效率可能会有所下降,需要进行合理的优化和加速。
2. 应用领域的广度三维Delaunay三角剖分算法在地质勘探、工程设计、地理信息系统等领域有着广泛的应用。
它能够帮助人们更好地理解和分析三维空间中的复杂结构和关系。
3. 数据结构和算法优化算法的实现和优化涉及到许多数据结构和计算几何的算法技术,需要深入研究和理解这些方面的知识,才能进一步提升三维Delaunay三角剖分算法的性能和效率。
四、总结和回顾三维Delaunay三角剖分算法是一种重要的计算几何算法,它在三维空间中能够高效地生成无缝的三角剖分,具有广泛的应用前景。
生成三角网格的三种基本方法_TT整理
分治算法
Shamos和Hoey提出了分治算法思想[10],并给出了一个生成V-图的分治算法。
Lewis 和Robinson将分治算法思想应用于生成D-三角网[11]。
他们给出了一个“问题简化”算法,递归地分割点集,直至子集中只包含三个点而形成三角形,然后自下而上地逐级合并生成最终的三角网。
逐点插入法
Lawson提出了用逐点插入法建立D-三角网的算法思想[11]。
逐点插入算法的基本步骤是:
定义一个包含所有数据点的初始多边形;在初始多边形中建立初始三角网,然后迭代以下步骤,直至所有数据点都被处理:插入一个数据点P,在三角网中找出包含P的三角形t,把P与t的三个顶点相连,生成三个新的三角形;
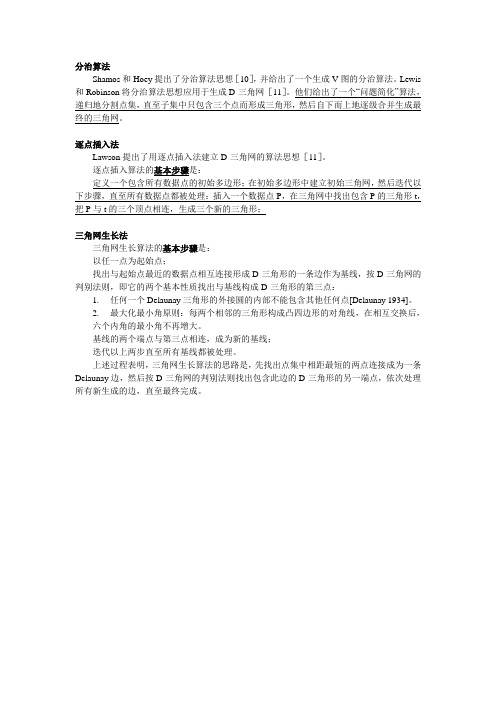
三角网生长法
三角网生长算法的基本步骤是:
以任一点为起始点;
找出与起始点最近的数据点相互连接形成D-三角形的一条边作为基线,按D-三角网的判别法则,即它的两个基本性质找出与基线构成D-三角形的第三点:
1.任何一个Delaunay三角形的外接圆的内部不能包含其他任何点[Delaunay 1934]。
2.最大化最小角原则:每两个相邻的三角形构成凸四边形的对角线,在相互交换后,
六个内角的最小角不再增大。
基线的两个端点与第三点相连,成为新的基线;
迭代以上两步直至所有基线都被处理。
上述过程表明,三角网生长算法的思路是,先找出点集中相距最短的两点连接成为一条Delaunay边,然后按D-三角网的判别法则找出包含此边的D-三角形的另一端点,依次处理所有新生成的边,直至最终完成。
基于三维网格的最短路径并行算法研究
Pa all l o ih ofm h re t a pahba e n 3 m s
W U a g la g Z Lin —in . HENG a - i Xi o we
( ol e f o ue d noma o eh oo y Lann r a U iesy D ln16 2 , C ia C l g mp t a fr t nTc n lg, io i No l nvri , a a 10 9 hn) e oC rn I i g m t i
基于三维网格的最短路径并行算法研究
武 亮 亮 , 郑 晓 薇
( 宁 师范 大 学 计 算机 与信 息技 术学 院 ,辽 宁 大连 162 ) 辽 10 9
摘 要: 针对 三角 网格 模 型 , 描述 了一 种求解 最短路 径 问题 的并行 算法 。该算法 使 用两矩 阵相 乘思 想, 利用对 邻接 矩阵 的划
和应 用 领 域 如计 算 机 科 学 、 算机 网络 与 通 信 、 S G S 控 制 与 计 I 、 I、 T
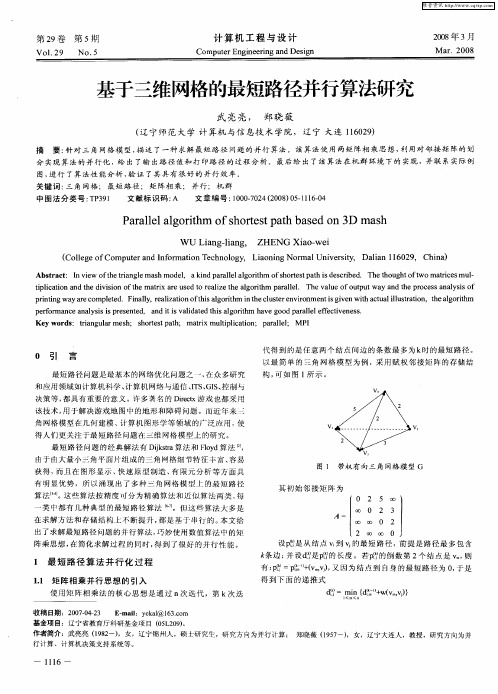
代 得 到 的是 任 意 两个 结 点 间 边 的条 数 最 多 为 k 的 最 短 路 径 。 时 以 最 简 单 的 三 角 网 格 模 型 为 例 , 用 赋 权 邻 接 矩 阵 的存 储 结 采
构, 如图 l 示。 可 所
决策 等 , 具 有 重 要 的 意义 。许 多 著名 的 Dr t游 戏 也 都 采 用 都 ic ex 该技 术 , 于 解 决游 戏 地 图 中 的地 形 和 障 碍 问题 。而 近 年 米 ! 用 角 网格 模 型 在 几 何 建 模 、 算 机 图形 学 等 领 域 的 广 泛 应 用 , 计 使
分 实 现 算 法 的 并 行 化 , 出 了 输 出路 径 值 和 打 印 路 径 的过 程 分 析 。 最 后 给 出 了 该 算 法 在 机 群 环 境 下 的 实 现 ,并 联 系 实 际 例 给 图, 行 了算法性 能分析 , 证 了其具有 很好 的并 行效 率 。 进 验 关 键 词 : 角 网格 ; 最 短 路 径 ; 矩 阵 相 乘 ; 并 行 ; 机 群 三 中 图 法 分 类 号 : P9 T31 文献标识码 : A 文 章 编 号 :0 072 (0 8 0 —l60 10 —0 4 2 0 ) 51 l—4
勾股定理最短路径问题
勾股定理最短路径问题
勾股定理最短路径问题是一种在数学和计算机科学领域中常见的问题。
该问题
的目标是找到两个给定点之间的最短路径,并且路径中的每个线段都恰好满足勾股定理。
勾股定理是一个基本的几何定理,它表明在一个直角三角形中,斜边的平方等
于两个直角边的平方和。
勾股定理最短路径问题则是将这个定理应用到路径规划中。
为了解决这个问题,我们可以使用图论中的最短路径算法,如Dijkstra算法或
A*算法。
首先,我们将给定的起点和终点转化为图中的节点,节点之间的连接表
示可以直接连接的路径。
在每个节点中,我们需要计算到达该节点的路径长度。
以起点为起始节点,我
们开始遍历每个相邻节点,并通过计算其与起点的距离来更新节点的路径长度。
这个过程会持续进行,直到所有节点的路径长度都被计算出来。
接下来,我们需要根据勾股定理来评估路径的长度。
对于连接起点和终点的路
径上的每一段线段,我们可以根据勾股定理计算其长度。
通过将每一段线段的长度累加,我们可以得到整条路径的长度。
最后,我们可以使用最短路径算法来确定具有最短长度的路径。
这将帮助我们
找到勾股定理最短路径问题的解决方案。
总结而言,勾股定理最短路径问题是一个涉及路径规划和数学定理应用的问题。
通过使用最短路径算法,我们可以找到满足勾股定理的最短路径,从而有效地解决这个问题。
如何进行三角网的建立与处理
如何进行三角网的建立与处理在计算机科学领域中,三角网是一种用于连接数据点的网格结构。
它由许多三角形组成,每个三角形的三个顶点都是数据点。
三角网的建立和处理是许多计算机图形学和计算机视觉任务中的基础步骤。
本文将探讨如何进行三角网的建立与处理。
一、三角网的建立三角网的建立是通过一系列步骤来生成一个包含数据点的三角网格。
以下是一个简单的流程:1. 数据预处理:首先,需要根据实际应用场景,对数据点进行预处理。
这可能包括数据清洗、数据采样和数据变换等操作,以确保数据的质量和适用性。
2. 确定边界条件:在建立三角网之前,需要确定边界条件。
边界条件可以是已知的数据点或外部提供的信息。
边界条件的选择对于生成合理的三角网格非常重要。
3. 进行三角网格的初始化:在确定边界条件后,可以开始进行三角网格的初始化。
这可以通过将数据点放置在二维平面上,并根据某种规则(如Delaunay三角剖分算法)进行三角剖分来实现。
三角剖分算法是一种常用的方法,它能够确保所有的三角形都是“良好”的,即不会出现重叠或相交的情况。
4. 优化三角网:在初始化完成后,可能需要进行一些优化来改进生成的三角网。
例如,可以使用各种算法来优化三角网的质量和形状,以满足特定的需求。
常用的优化算法包括Laplacian平滑算法和拓扑优化算法等。
二、三角网的处理一旦三角网建立完成,就可以进行各种处理操作。
以下是一些常见的三角网处理技术:1. 网格编辑:三角网的处理通常涉及在网格上进行编辑和修改。
这可以通过添加、删除或移动数据点来实现。
网格编辑技术是计算机图形学和计算机视觉任务中的重要部分,可以用于模型编辑、形变和纹理映射等应用。
2. 网格分析:通过对三角网进行分析,可以获得有关数据点之间关系的更多信息。
例如,可以计算三角形的面积、周长和法向量等属性。
这些信息在许多应用中都是有用的,如物体表面重建、拓扑分析和形状匹配等。
3. 网格变形:通过对三角网进行变形操作,可以实现形状的变化和动画效果。
三维网格分割--基础知识
三维网格分割经典聚类算法
模糊聚类分割算法:2003 年,Katz 等人提出了模糊聚类的层次分解算法,将 复杂模型进行由粗到精,得到分割片层次树,一层一层的处理,最终分割成边 界线平滑、有意义的若干个较为简单的部分。层次树的根表示整个网络模型 S。 在每个节点,首先确定需要进一步分割为更精细分割片的数目,然后执行个Kway 分割。优点:该算法可以得到有意义的部分子模型,且没有出现锯齿现象, 算法也不会产生过分分割效果。
W
F 2,1
N2 j 1
W , j 表示表示的第j个列向量W,
,h , j W WW h X h2
Xh
2 F
WhTWh
1,1
三维网格分割组合分割-亲和力聚合谱聚类
亲和力聚合谱聚类(AASC):寻求描述网格过分割面片多特征融合的亲和矩 阵,利用谱聚类算法对所有补丁块进行一致分割。
分割准 则
三维网格分割及其相关基本概念
表面测地线距离:是指三维模型的两个顶点在模型表面的最短距离,它不仅可以有 效的克服三维模型噪声的干扰,而且与三维模型的坐标系方向无关。但不易计算, 常用特征描述之间的欧氏距离代替。
欧几里德距离:两个n维向量a(x11,x12,…,x1n)与 b(x21,x22,…,x2n)间的欧氏距离:
亲和力聚合谱聚类实现过程:
谱聚类划分数据到m个互不相交的类,寻找索引向量F f1, f2 , , fn ,满足
min W
f1 , , fn i, j
kij
fi , f j
2
F D W F
s.t. F DF 1 利用Lu Du = 1,2 , 令亲和矩阵相关权值为
勾股定理最短路径
勾股定理最短路径引言勾股定理是初中数学中的重要定理之一,它描述了直角三角形中三条边之间的关系。
而最短路径是图论中的一个经典问题,它涉及寻找两个顶点之间最短的路径。
本文将探讨如何利用勾股定理来解决最短路径问题。
最短路径问题最短路径问题是在一个图中寻找两个顶点之间的最短路径。
在图论中,图由一组顶点和一组边组成,边连接两个顶点并表示它们之间的关系。
最短路径问题有着广泛的应用,例如在网络路由、物流规划和导航系统中都需要找到最短路径。
勾股定理勾股定理是由古希腊数学家毕达哥拉斯提出的。
它表述为:直角三角形的斜边的平方等于两个直角边的平方和。
即a2+b2=c2,其中c为斜边的长度,a和b为两个直角边的长度。
最短路径算法解决最短路径问题的算法有很多种,其中最著名的一种是迪杰斯特拉算法。
该算法通过动态规划的思想,逐步更新起始点到其他所有点的最短路径。
具体步骤如下:1.创建一个集合S,用于存放已经找到最短路径的顶点。
2.初始化起始点到其他所有点的距离为无穷大,起始点到自身的距离为0。
3.选择一个距离最小的顶点v,将其加入集合S。
4.更新起始点到v的邻接点的距离,如果经过v的路径比当前路径短,则更新距离。
5.重复步骤3和4,直到集合S包含了所有顶点。
6.最终得到起始点到其他所有点的最短路径。
勾股定理最短路径算法在某些特殊情况下,我们可以利用勾股定理来求解最短路径问题。
假设我们有一个平面上的图,其中每个顶点表示一个点的坐标,边表示两个点之间的距离。
如果我们要求解从起始点到目标点的最短路径,并且只能沿着直角边移动,那么我们可以利用勾股定理来解决这个问题。
具体步骤如下:1.将平面上的点表示为二维坐标(x,y),其中x和y分别表示点在x轴和y轴上的坐标。
2.计算起始点到所有其他点的直线距离,并将其作为初始最短路径。
3.对于每个顶点,计算其到目标点的直线距离,并利用勾股定理计算出最短路径。
4.选择最短路径最小的顶点作为下一个移动的目标点。
三角形网格生成(大作业)
网格生成基本方法
2、初始网格生成(两种方式)
网格生成基本方法
3、三角形的细分(三种细分方式)
初始三角形
剖分三角形(一)
网格生成基本方法
3、三角形的细分
剖分三角形(二)
剖分三角形(三)
网格生成基本方法
如何减少网格节点?
三角形和节点关系定理:对于任意n个节点,如果边界上的节点数 为k,(满足k<n),那么任意三角形剖分必然由2n-2-k个三角形 组成。
1、三角形的边长尽可能的长。
2、三角形的形状尽可能的正。elaunay三角剖分
网格生成基本方法
4、三角形的优化(二)——拉普拉斯光顺
ro
ri
i 1
n
n
网格生成基本方法
5、边界处理
(1)三角形剖分时处理 (2)初始化时处理
网格生成基本方法
apennytaobaocom计入150150152025152格生成基本方法初始格生成三角形的计分三计计分方式初始三角形剖分三角形一格生成基本方法三角形的计分剖分三角形三剖分三角形二格生成基本方法那计任意三角形剖分必然由2n2k三角形计成
计算机软件技术基础
三角形网格生成
能源与动力工程学院
三角形网格生成
网格生成基本方法
6.1 修改的节点数据结构
struct Node { unsigned int no; double X,Y; }
网格生成基本方法
7.1 修改的输出格式
N——节点数目 S0,X0,Y0——节点坐标 S1,X1,Y1 …… Sn,XN,YN M——三角形单元数目 D10,D20,D30——三角单元数据 D11,D21,D31 …… D1M,D2M,D3M
Delaunay三角剖分
Delauney三角网剖分算法原理:分为三步:一、凸包生成:1)求出如下四点:min(x-y)、min(x+y)、max(x-y)、max(x+y)并顺次放入一个数组,组成初始凸包;2)对于凸包上的点I,设它的后续点为J,计算矢量线段IJ右侧的所有点到IJ的距离,求出距离最大的点K;3)将K插入I,J之间,并将K赋给J;4)重复2,3步,直到点集中没有在IJ右侧的点为止;5)将J赋给I,J取其后续点,重复2,3,4步,当遍历了一次凸包后,凸包生成完成。
二、环切边界法凸包三角剖分:在凸包数组中,每次寻找一个由相邻两条凸包边组成的三角形,在该三角形的内部和边界上都不包含凸包上的任何其他点,然后去掉该点得到新的凸包链表,重复这个过程,最终对凸包数组中的点进行三角剖分成功。
三、离散的内插:1)建立三角形的外接圆,找出外接圆包含待插入点的所有三角形,构成插入区域;2)删除插入区域内的三角形公共边,形成由影响三角形顶点构成的多边形;3)将插入点与多边形所有顶点相连,构成新的Delaunay三角形;4)重复1,2,3,直到所有非凸包上的离散点都插入完为止。
功能实现流程:1. 在绘图菜单栏下添加一个子菜单项为Delauney,并且在工具栏上添加一个工具项。
设置text为Delaunay三角剖分,name为delaunay等属性,添加单击事件,并为单击事件代码2.为事件函数添加如下代码Graphics gra = panel1.CreateGraphics();List<Point_T> pts = new List<Point_T>();foreach (Geometry_T geo in choosegeos.Geofeatures){if (geo.GetType() == typeof(Point_T)){Point_T pt = (Point_T)geo;pts.Add(pt);}}List<Tin> deltins = DelauneyTin(pts);//根据多点构建delauney三角网foreach (Tin tin in deltins){Point[] ctin = new Point[3];for (int i = 0; i < 3; i++){cp = new Point((int)tin.Pthree[i].X, (int)tin.Pthree[i].Y); ctin[i] = cp;}gra.DrawPolygon(Pens.Red, ctin);}3.三角形TIN的数据结构public class Tin{Point_T[] pthree = new Point_T[3];Line_T[] lthree = new Line_T[3];public Line_T[] Lthree{get { return lthree; }set { lthree = value; }}public Point_T[] Pthree{get { return pthree; }set { pthree = value; }}public Tin(){ }public Tin(Point_T p1, Point_T p2, Point_T p3){pthree[0] = p1;pthree[1] = p2;pthree[2] = p3;lthree[0] = new Line_T(p1, p2);lthree[1] = new Line_T(p2, p3);lthree[2] = new Line_T(p3, p1);}}4.圆的数据结构public class Circle_T:Geometry_T{private Point_T cpt;public Point_T Cpt{get { return cpt; }set { cpt = value; }}double radius;public double Radius{get { return radius; }set { radius = value; }}public Circle_T(){ }public Circle_T(Point_T pt, double r){cpt = pt;radius = r;}}5.实现Delaunay三角剖分算法1)public List<Tin> DelauneyTin(List<Point_T> pts)//根据多点构建delauney三角网;分三步:构建凸包;凸包剖分;离散点内插{Graphics gra = panel1.CreateGraphics();List<Tin> deltins = new List<Tin>();List<Point_T> envpts = EnvelopeTin(pts);//构建凸包//for (int i = 0; i < envpts.Count - 1; i++)//{// gra.DrawLine(Pens.Black, new Point((int)envpts[i].X,(int)envpts[i].Y), new Point((int)envpts[i + 1].X, (int)envpts[i + 1].Y));//}//gra.DrawLine(Pens.Black, new Point((int)envpts[0].X, (int)envpts[0].Y), new Point((int)envpts[envpts.Count - 1].X, (int)envpts[envpts.Count - 1].Y));List<Point_T> dispts = new List<Point_T>();//非凸包上的离散点foreach (Point_T pt in pts){if (!envpts.Contains(pt)){dispts.Add(pt);}}List<Tin> envtins = EnvelopeDivision(envpts);//凸包剖分//foreach (Tin tin in envtins)//{// Point[] ctin = new Point[3];// for (int i = 0; i < 3; i++)// {// cp = new Point((int)tin.Pthree[i].X, (int)tin.Pthree[i].Y);// ctin[i] = cp;// }// gra.DrawPolygon(Pens.Blue, ctin);//}deltins = TinInsert(envtins, dispts);//离散点内插return deltins;}2)public List<Point_T> EnvelopeTin(List<Point_T> pts)//构建凸包{List<Point_T> envpts = new List<Point_T>();List<Point_T> othpts = new List<Point_T>();foreach (Point_T pt in pts){othpts.Add(pt);}//构建以x-y,x+y最大最小值组成的初始矩形框CompareXaddY comxandy = new CompareXaddY();CompareXsubY comxsuby = new CompareXsubY();pts.Sort(comxsuby);envpts.Add(pts[0]);envpts.Add(pts[pts.Count - 1]);othpts.Remove(pts[0]);othpts.Remove(pts[pts.Count-1]);pts.Sort(comxandy);if(!envpts.Contains(pts[0])){envpts.Insert(1, pts[0]);}if (!envpts.Contains(pts[pts.Count - 1])){envpts.Add(pts[pts.Count - 1]);}othpts.Remove(pts[0]);othpts.Remove(pts[pts.Count-1]);//构建以x-y,x+y最大最小值组成的初始矩形框int i = 0;int tag = 0;bool over = true;while(i<envpts.Count){Line_T cline;if (i==envpts.Count-1){cline = new Line_T(envpts[i], envpts[0]);}else{cline = new Line_T(envpts[i], envpts[i + 1]);}double dismax=0;for (int j = 0; j < othpts.Count ;j++ ){if (IsLeftPoint(othpts[j], cline)){double distance = PointToLine(othpts[j], cline);if (distance > dismax){dismax = distance;tag = j;over = false;}}}if (over){i++;}else{//envpts.RemoveAt(i);envpts.Insert(i+1, othpts[tag]);over = true;}}return envpts;}public List<Tin> EnvelopeDivision(List<Point_T> pts)//凸包剖分{List<Tin> envtins = new List<Tin>();List<Point_T> cpts = new List<Point_T>();foreach (Point_T pt in pts){cpts.Add(pt);}while (cpts.Count > 2){int tag = 0;double minangle = 120;for (int i = 0; i < cpts.Count; i++){double angle;if (i == 0){angle = CalcuAngle(cpts[cpts.Count - 1], cpts[i], cpts[i + 1]);}else if (i == cpts.Count - 1){angle = CalcuAngle(cpts[i-1], cpts[i], cpts[0]);}else{angle = CalcuAngle(cpts[i-1], cpts[i], cpts[i + 1]);}if ((angle - 60) < minangle){minangle = angle - 60;tag = i;}}int btag=tag-1;int atag=tag+1;if (tag == 0){btag = cpts.Count - 1;}else if (tag == cpts.Count - 1){atag = 0;}Tin ctin = new Tin(cpts[btag], cpts[tag], cpts[atag]);envtins.Add(ctin);cpts.RemoveAt(tag);}return envtins;}public List<Tin> TinInsert(List<Tin> tins, List<Point_T> pts)//离散点内插 {List<Tin> deltins = new List<Tin>();List<Tin> ctins = new List<Tin>();//临时凸包foreach (Tin tin in tins){ctins.Add(tin);}foreach (Point_T pt in pts)//对离散点遍历,内插{List<Point_T> cpts = new List<Point_T>();//临时点集foreach (Tin tin in ctins)//找到外接圆包含离散点的三角形{Circle_T ccir = DelauneyCicle(tin);//构造外接圆if (IsPointInCircle(pt, ccir))//点是否包含在圆内{//for (int i = 0; i < 3; i++)//{// if (!cpts.Contains(tin.Pthree[i]))// {// cpts.Add(tin.Pthree[i]);//记录当前点// }//}deltins.Add(tin); //记录保存当前三角形}}//List<Point_T> ecpts = EnvelopeTin(cpts);//求点集(外接圆包含离散的三角形)的凸包?,接下来,插入点,构建新三角网//for (int j = 0; j < ecpts.Count;j++ )//{// Tin tin;// if (j == ecpts.Count-1)// {// tin = new Tin(ecpts[j], ecpts[0], pt);// }// else// {// tin=new Tin(ecpts[j],ecpts[j+1],pt);// }// ctins.Add(tin);//}List<Line_T> eli = BorderTin(deltins);foreach (Line_T line in eli){Tin tin = new Tin(line.Frompt, line.Topt, pt);ctins.Add(tin);}foreach (Tin tin in deltins)//改变临时三角网(删除deltins保存的三角网){ctins.Remove(tin);}deltins.Clear();}return ctins;}3)public bool IsLeftPoint(Point_T pt, Line_T line)//点在线的左边;叉积大于{bool yes = false;if ((pt.X - line.Frompt.X) * line.ParaA + (pt.Y - line.Frompt.Y) * line.ParaB > 0){yes = true;}return yes;}public double CalcuAngle(Point_T fp, Point_T mp, Point_T tp)//首,中,尾三点构成的夹角{double angle = 0;Point_T vector1 = new Point_T(fp.X - mp.X, fp.Y - mp.Y);Point_T vector2 = new Point_T(tp.X - mp.X, tp.Y - mp.Y);angle = Math.Acos((vector1.X * vector2.X + vector1.Y * vector2.Y) /(Math.Sqrt(vector1.X * vector1.X + vector1.Y * vector1.Y) *Math.Sqrt(vector2.X * vector2.X + vector2.Y * vector2.Y)));return angle;}public Circle_T DelauneyCicle(Tin tin)//构建三角形的外接圆{double x1 = tin.Pthree[0].X;double x2 = tin.Pthree[1].X;double x3 = tin.Pthree[2].X;double y1 = tin.Pthree[0].Y;double y2 = tin.Pthree[1].Y;double y3 = tin.Pthree[2].Y;double x = ((y2 - y1) * (y3 * y3 - y1 * y1 + x3 * x3 - x1 * x1) - (y3 - y1) * (y2 * y2 - y1 * y1 + x2 * x2 - x1 * x1))/ (2 * (x3 - x1) * (y2 - y1) - 2 * ((x2 - x1) * (y3 - y1)));double y = ((x2 - x1) * (x3 * x3 - x1 * x1 + y3 * y3 - y1 * y1) - (x3 - x1) * (x2 * x2 - x1 * x1 + y2 * y2 - y1 * y1))/ (2 * (y3 - y1) * (x2 - x1) - 2 * ((y2 - y1) * (x3 - x1)));Point_T cpt = new Point_T(x, y);double radius=Math.Sqrt(Math.Pow((x1-x),2)+Math.Pow((y1-y),2));Circle_T cir = new Circle_T(cpt,radius);return cir;}public bool IsPointInCircle(Point_T pt, Circle_T cir){if(Math.Sqrt(Math.Pow((pt.X-cir.Cpt.X),2)+Math.Pow((pt.Y-cir.Cpt.Y),2))<cir.Radius) {return true;}elsereturn false;}public List<Line_T> BorderTin(List<Tin> tins){List<Line_T> borli = new List<Line_T>();for (int i = 0; i < tins.Count; i++){for (int t = 0; t < 3; t++){bool tag = false;Line_T cl = tins[i].Lthree[t];for (int j = 0; j < tins.Count; j++){if (j!=i&&IsContainByTin(cl, tins[j])){tag = true;}}if (!tag)borli.Add(cl);}}return borli;}public bool IsContainByTin(Line_T li, Tin tin){for (int i = 0; i < 3; i++){if ((li.Frompt == tin.Lthree[i].Frompt || li.Frompt ==tin.Lthree[i].Topt) && (li.Topt == tin.Lthree[i].Topt || li.Topt ==tin.Lthree[i].Frompt)){return true;}}return false;}6.实现两个排序类CompareXsubY(x-y排序)和CompareXaddY(x+y 排序),仿照CompareX写功能操作步骤:先在面板上绘制多个点;框选部分点;按下实现Delaunay三角网剖分工具,Delaunay三角网剖分成功。
任意曲面的三角形网格划分
任意曲面的三角形网格划分任意曲面的三角形网格划分是基于三角形网格生成算法实现的。
这些算法通常采用参数化方法表示曲面,并使用分割线段、迭代细分等方式将曲面划分为许多小的三角形网格。
具体实现过程中,可以采用不同的三角形网格生成算法,如Loop subdivision、Butterfly subdivision等。
这些算法在处理复杂曲面时具有不同的特点和适用范围。
任意曲面的三角形网格划分的优点主要表现在以下几个方面。
三角形网格结构清晰,易于理解和实现。
这种网格划分操作简单,可快速生成并处理大量网格数据。
三角形网格具有广泛的适用范围,可以适用于各种不同形状和性质的曲面。
任意曲面的三角形网格划分在计算机图形学、几何计算和可视化等领域有着广泛的应用。
在计算机图形学中,三角形网格是构建复杂三维模型的基础,也是进行渲染、动画等操作的基础。
在几何计算中,三角形网格可用于表面重建、形状匹配、有限元分析等任务。
在可视化领域,三角形网格可以用于生成高质量的渲染图像和动画,也可用于科学计算结果的可视化。
在使用任意曲面的三角形网格划分时,需要注意以下问题。
由于这种网格生成算法的计算量较大,因此需要优化算法以提高生成效率。
网格生成过程中需要存储大量的网格数据,因此需要合理组织数据结构以减少存储需求。
实现复杂度较高,需要仔细设计算法和数据结构以避免错误和漏洞。
任意曲面的三角形网格划分是一种非常重要的技术,在计算机图形学、几何计算和可视化等领域有着广泛的应用。
通过深入了解这种网格划分的原理和优点,掌握其应用场景及注意事项,我们可以更好地利用这种技术来处理和计算各种不同形状和性质的曲面。
曲面重构是一种从几何形状中提取特征并生成新的几何表示的技术,在计算机图形学、计算机视觉、生物医学工程等领域具有广泛的应用。
三角形网格是一种常见的曲面表示形式,具有灵活性和高效性,因此成为曲面重构领域的重要研究对象。
本文旨在探讨三角形网格上曲面重构技术的现状、研究方法、研究成果及未来发展方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三角网格的最短路径计算及对其分割
摘要
对于人或者动物的模型来说,从视觉认知上将他们分解为头、身体和四肢,然后对
其进行变形、拼接等操作。本文主要是应用k-means算法,从一个物体上分割出一个有意义
的子部分。近年来,在计算机图形学中,将多边形网格分解为子网。本文提出了一种新的层
次网格分割算法,在模型的深凹陷区域进行有意义分割。该算法还避免了过度分割和锯齿边
界。
关键词:
k-means算法;层次网;分网
Computing and segmenting Triangular
grid’s shortest path
Abstract
For human or animal models,the people often,decomposed into their head,
body and limbs by their the visual cognition.,then be deformed,splicing and other
operations.This paper is to apply k-means algorithm, separating a meaningful
Sub-section from an object. In recent years, in computer graphics, polygonal meshes
are decomposed into sub-meshes.In this paper we propose a novel hierarchical mesh
decomposition algorithm. Our algorithm computes a decomposition into the meaningful
components of a given mesh, which generally refers to segmentation at regions of
deep concavities. The algorithm also avoids over-segmentation and jaggy boundaries
between the components.
Key words:
k-means algorithm;mesh decomposition; sub-meshes
基于文献[1]的研究,图形分割的一个重要任务是计算三维网格模型的最短路径。本文
应用单源Dijkstra算法和Floyd算法[2]。Dijkstra算法是从某个原点到其余各顶点的单源
最短路径算法。主要特点是以起始点为中心向外层层扩展,知道扩展到终点为止。Floyd算
法是求每对顶点之间的最短路径问题。基于图的带权邻接矩阵A=[a( i, j)] n×n,递归地
进行n次更新,即由矩阵D(0)=A,按Dijkstra算法计算,构造出矩阵D(1);又用同样地方
法由D(1)构造出(2);……;最后又用同样的方法由D(n-1)构造出矩阵D(n)。矩阵D(n)的i
行j列元素便是i号顶点到j号顶点的最短路径长度,称D(n)为图的距离矩阵,同时还可引
入一个后继节点矩阵path来记录任意两点间的最短路径。
1
相关工作
聚类分析指将物理或抽象对象的集合分组成为由类似的对象组成的多个类的分析过程。
聚类与分类的不同在于,聚类所要求划分的类是未知的,分类是将数据分类到不同的类或者
簇这样的一个过程,所以同一个簇中的对象有很大的相似性,而不同簇间的对象有很大的相
异性。
在数据分类中,常用的分类方法有多元统计中的系统聚类法、模糊聚类分析等。在模糊
聚类分析中,首先要计算模糊相似矩阵,不同的模糊相似矩阵会产生不同的分类结果,即使
采用相同的模糊相似矩阵,不同的阈值也会产生不同的分类结果。如何确定这些分类的有效
性,便成为模糊聚类和模糊识别[3]研究中的一个重要问题。
K-means算法属于聚类方法中的一种划分方法,该算法具有较好的可伸缩性和很高的效率,
适合处理大文档集。 k-means 算法接受输入量 k ;然后将n个数据对象划分为 k个聚类以
便使得所获得的聚类满足:同一聚类中的对象相似度较高;而不同聚类中的对象相似度较小。
k-means 算法,首先从n个数据对象任意选择 k 个对象作为初始聚类中心,而对于所剩
下其它对象,则根据它们与这些聚类中心的相似度(距离),分别将它们分配给与其最相似
的(聚类中心所代表的)聚类;然 后再计算每个所获新聚类的聚类中心(该聚类中所有对象
的均值)。K-means特点:类内距离小,类间距离大。
2 算法描述
根据文献[1],确定k值可满足下列三个条件之一:(a)使各类之间的距离小于一个给定
的阈值; (b)使各类面片之间角度的最大值和最小值之差不大于1,以至于每个面片有相当
稳定的曲率不配分解; (c) 使各类平均距离的比率不超过一个给定的阈值。
面片之间的角距离是相邻面片
i
f
和jf之间法向量的夹角;公式如下:
_()(1cos)ijijAngDist
当1,凸凹两面角是没有差别的。由于凹面角是一个较好的边界参照,我们就计算凸面的反面。
设定当01时计算的是凸面角,当1时计算的是凹面角。
本文先计算面片间的测地[4]距离 ,()ijGeodff和面片间的角度距离_()ijAngDist,再根
据这两方面因素综合考虑,对图形进行分割。把相邻面片if和jf之间的权值定义如下:
(,)_()((),())(1)()(_)ijijijGeodffAngDist
WeightdualfdualfavgGeodavgAngDist
[0,1]
3 实验
本文根据k-means算法中的返回的信息,计算各聚类到各聚类中心点的距离和,比较各
k值间的差值,寻找满足它们的差值首次幅度最大的k为本文所以的k值。为了验证本文方
法,以具体模型(如图1)为例。先对其求最短路径。应用Dijikstra算法计算结果如图2;
图1 图2
应用Floyd算法计算最短路径结果如图3;
图3
再进行k-means聚类分割,用下面函数确定k值:
()min((,))ikkiGkDistREPREP
分割结果如图4
图4
4 结论
用Floyd求最短路径的时候,需要对每对顶点都求最短路径,这样在图形标出时会比较
乱,所以将图形显示改为文本显示。本文图形的分割已基本达到要求,实验结果表明,对图
形的分割还不够完善,需要进一步改进,应达到把头和尾也分割的效果。
参考文献
[1] Hierarchical mesh decomposition using fuzzy clustering and cuts
[2] Computing geodesic paths on manifolds
[3] Fast exact and approximate geodesics on meshes
[4] Easy mesh cutting