ANSYS—接触单元说明
ansys中design modeler单元类型
ansys中design modeler单元类型
“ansys中design modeler单元类型”指的是在Ansys软件中的Design Modeler模块中使用的不同种类的单元类型。
在Design Modeler中,用户可以使用不同的单元类型来模拟各种材料和结构的性能。
这些单元类型可以根据不同的应用场景和需求进行选择,例如结构分析、流体动力学分析、电磁分析等。
常见的Ansys Design Modeler单元类型包括:
1.壳单元(Shell):用于模拟薄壁结构的力学行为,如圆筒、管道等。
2.梁单元(Beam):用于模拟细长结构的力学行为,如桥梁、高层建筑等。
3.实体单元(Solid):用于模拟实体的力学行为,如块、球等。
4.弹簧单元(Spring):用于模拟弹性连接的力学行为,如弹簧、阻尼器等。
5.质量单元(Mass):用于模拟质点的力学行为,如飞轮、陀螺等。
6.接触单元(Contact):用于模拟两个结构之间的接触行为,如摩擦、粘合
等。
除了以上常见的单元类型外,Design Modeler还提供了许多其他的特殊单元类型,用于模拟各种复杂的结构和材料行为。
总之,Ansys Design Modeler的单元类型是多种多样的,用户可以根据实际需求进行选择和设置,以准确地模拟各种工程问题的性能。
Ansys WB官方培训教程_1.5_Contact接触设置模块

第三章接触简介Workbench –Mechanical 结构非线性章节概述Training Manual •本章介绍实体接触:–假定用户在这章前已掌握第2章非线性结构.•介绍的具体课题是:A.接触基本概念B B.接触公式C.刚度和渗透D.作业3AE.Pinball 区域F.对称与反对称G.接触结果后处理H.作业3B•本章描述的性能通常适用于ANSYS Structural或以上的licenseA. 基本概念Training Manual 接触:•两独立表面相互接触并相切,则称之为接触.•一般物理意义上, 接触的表面包含如下特性:–不会渗透.–可传递法向压缩力和切向摩擦力.–通常不传递法向拉伸力.•可自由分离和互相移动.•接触是状态改变非线性. 也就是说, 系统刚度取决于接触状态, 即part之间是接触或分离.... 基本概念Training Manual 接触区域如何计算:•物理上,接触体间不相互渗透. 因此, 程序必须建立两表面间的相互关系以阻止分析中的相互穿透.分析中的相穿透–程序阻止渗透, 称为强制接触协调性.Workbench Mechanical提供几种不同接触公式来在接触界面强制协调性.–Workbench MechanicalF当接触协调性不被强制时会发生渗透.FTargetContactTraining ManualB. 接触公式•对非线性实体表接触, 可使用罚函数或增强拉格朗日公式:–两种方法都是基于罚函数方程:这里对于个有限的接触力存在个接触刚度的的概念接触刚npenetratio normal normal x k F =–这里对于一个有限的接触力F normal , 存在一个接触刚度的k normal 的概念,接触刚度越高,穿透量x penetration 越小,如下图所示–对于理想无限大的k , 零穿透. 但对于罚函数法,这在数值计算中是不可能normal ,零,但是只要x penetration 足够小或可忽略,求解的结果就是精确的。
ANSYS单元中文介绍
Ansys单元的类型及选择
梁单元
东南大学土木学院秦卫红
Ansys单元的类型及选择
常用梁单元分类
常用梁单元
二维梁单元 BEAM3、BEAM23、BEAM54
三维梁单元 BEAM4、BEAM24、BEAM44
三维有限应变单元 BEAM188、BEAM189
东南大学土木学院秦卫红
东南大学土木学院秦卫红
Ansys单元的类型及选择
输入数据
该单元的几何,节点位置以及坐标系见图1,单元
通过两个节点、横截面、初始应变或间隙以及各 项同性材料特性来定义。单元的X轴是沿着节点I 到节点J的单元长度方向。 单元的初始应变(ISTRN)由Δ/L给出,这里 Δ为 单元长度的变化量。对于受拉(缆)选项,负的 应变值表示其处于松弛状态。对于受压(裂口) 选项,正的应变值表示其处于裂开状态。LINK10 单元在每个节点上有三个自由度:沿节点坐标系 X、Y、Z方向的平动,不管是仅受(缆)选项, 还是仅受压(裂口)选项,本单元都不包括弯曲 刚度。
东南大学土木学院秦卫红
Ansys单元的类型及选择
LINK8的假定和限制
杆件假设为均质直杆,在其两端点受轴向
荷载作用; 杆长应大于0,即节点I,J不能重合; 杆件必须位于X-Y平面且截面面积要大于0; 温度沿杆长为线性变化; 位移函数表明杆件应力均匀; 初始应变也参与应力刚度矩阵的计算。
Ansys单元的类型及选择
Beam4是一种可用于承受拉、压、弯、扭的三维弹性梁单 元。这种单元在每个节点上有六个自由度:x、y、z三个 方向的线位移和绕x,y,z三个轴的角位移。可用于计算应力 硬化及大变形的问题。 Beam188与Beam189相对Beam4的第一个突出点是具有 更出色的截面数据定义功能和可视化特性,横截面定义指 垂直于梁的轴向的截面形状。ANSYS提供了11种常用梁 截面形状,并支持用户自定义截面形状。当定义了一个横 截面时,ANSYS建立一个9结点的数值模型来确定梁的截 面特性(如lyy,lzz等),并通过求解泊松方程得到弯曲 特征。第二个突出点是Beam188与Beam189自动考虑了剪 切变形。 采用BEAM4建模时,直接输入截面特性:两个主轴的 惯性矩,高度,宽度,面积。ANSYS处理时直接调入参 数计算。对于所有截面型式模型中均显示为矩形,但对非 矩形截面时并不是简单的等效为矩形,在双向受力时按等 效矩形计算是错误的。 东南大学土木学院秦卫红
ansys各种结构单元介绍-图文

ansys各种结构单元介绍-图文ANSYS单元手册摘要一、单元分类DY-ANSYS/LS-Dyna3DPR-ANSYS/ProfeionalEM-ANSYS/Emag3D说明结构单元LINK1PLANE2BEAM3BEAM4COMBIN7LINK8LINK10LINK11CONTAC12COMBIN14PIP E16PIPE17PIPE18PIPE20MASS21BEAM23BEAM24PLANE25CONTAC26MATRI某27SHELL28COMBIN37FLUID38COMBIN39COMBIN40SHELL41PLANE42SHELL43BEA M44SOLID45SOLID46CONTAC48CONTAC49MATRI某50SHELL51CONTAC52二维杆二维六节点三角形结构实体二维弹性梁三维弹性梁铰接连结单元三维杆仅承拉或仅承压的杆线形调节器二维点-点接触单元弹簧-阻尼单元弹性直管弹性T形管弹性弯管(Elbow)塑性直管结构质量元二维塑性梁三维薄壁梁四节点轴对称-谐分析结构实体二维点-地面接触单元刚度、阻尼和质量阵剪切/扭转板单元控制单元动力流体耦合单元非线性弹簧组合单元膜单元二维结构实体塑性大应变壳三维渐变不对称梁三维结构实体三维分层结构实体二维点-面接触单元三维点-面接触单元超单元轴对称结构壳三维点-点接触单元YYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYY YYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYY--Y------Y------Y------Y--------------Y------Y--------------Y------Y------Y------Y------Y--------------Y--------------------------------------Y------Y------------------------------Y--------------Y--------------Y------Y------Y----------------------Y------Y------Y----YYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYY--YYYYYMP-ANSYS/MultiphyicME-ANSYS/MechanicalST-ANSYS/Structural单元名称FL-ANSYS/FlotranPP-ANSYS/PrepPotED-ANSYS/EDMPMESTDYPREMFLPPEDANSYS单元手册摘要BEAM54二维弹性渐变不对称梁单元名称说明PIPE59PIPE60SHELL61SHELL63SOLID64SOLID65SOLID72PLANE82PLANE83SHE LL91SOLID92SHELL93SOLID95SHELL99SHELL143PLANE145PLANE146SOLID147 SOLID148SHELL150单元名称LINK180SHELL181PLANE182PLANE183SOLID185SOLID186SOLID187BEAM188BE AM189BEAM191MESH200LINK160BEAM161SHELL163SOLID164COMBI165MASS166 LINK167-1-YYY--Y----YYMPMESTDYPREMFLPPED沉管或缆塑性弯管(Elbow)轴对称-谐分析结构壳弹性壳三维各向异性实体三维加筋混凝土实体有转动自由度的三维四节点四面体结构实体二维八节点结构实体八节点轴对称-谐分析结构实体非线性分层结构壳三维十节点四面体结构实体八节点结构壳三维二十节点结构实体线性分层结构壳塑性壳二维四边形结构实体p-单元二维三角形结构实体p-单元三维砖块结构实体P单元三维四面体结构实体P单元八节点结构壳P单元说明三维有限应变杆有限应变壳二维结构实体二维八节点结构实体三维八节点结构实体三维二十节点结构实体三维十节点四面体结构实体三维有限应变梁三维有限应变梁三维20节点层结构实体网格划分辅助单元网格划分单元LS-DYNA单元显式三维杆单元显式三维梁单元显式结构薄壳显式三维结构实体显式弹簧-阻尼单元显式三维结构质量显式承拉杆单元YYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYY--------------------------Y----------------------Y------Y----------------------Y------Y------Y------Y--------------Y------Y------Y------Y------Y------Y------Y------Y--------------Y------------------------------------YYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYY--YYY--YYYYYYYYYYYYYYYMPMESTDYPREMFLPPEDYYYYYYYYY------------------------------------------YYYYYYY----------------------------------------------------------------------ANSYS单元手册摘要LINK1—二维杆单元单元描述:LINK1单元有着广泛的工程应用,比如:桁架、连杆、弹簧等等。
ANSYS主要的接触问题
• Step 7.求解 • solve • Step 8.后处理 • 接触分析的结果主要包括位移、应力、应变和接触信息。 • 接触信息包括:接触压力、单元的现在和过去状态: • 分开(没有接触) • 接触粘合状态 • 接触滑动状态 • 粘合 = 1;滑动 = 2或 -2;分开 = 3或4 • ·两个表面间的距离,如果是正值,两表面是分开的(STAT = 3或
Component
• Component name = CONTACT
• Component is made of = nodes • 【OK】 • 命令:CM,CONTACT,node
• ·KEYOPT(1):选择自由度 • ·KEYOPT(2):选择罚函数的方法 • 0-Penalty function罚函数法 • 1-Penalty function + Lagrange multiplier
(罚函数+拉格朗日法)
• 缺省情况下单元采用罚函数法保证接触协调性。 也可以选择混合罚函数和拉格朗日法,此方法还要 指定一个穿透容差,单位为长度。
• NSEL,S,NODE, …
! 在接触面上选择一组节点
• CM,CONTACT,NODE “CONTACT”
! 将所有节点定义成组元
• NSEL,S,NODE, … 点
! 在目标单元上选择一组节
• CM,TARGET,NODE, “TARGET”
! 将所选节点定义成组元
• NSEL,ALL
! 选中所有节点
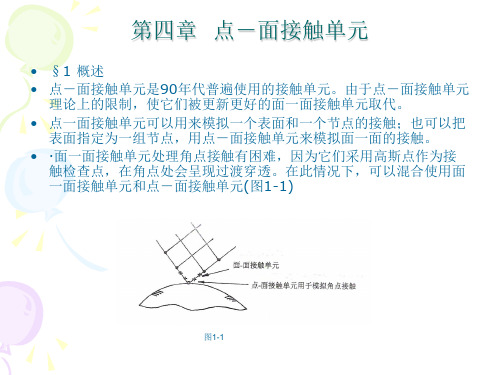
触检查点,在角点处会呈现过渡穿透。在此情况下,可以混合使用面 一面接触单元和点-面接触单元(图1-1)
图1-1
• ·点-面接触单元不必知道接触 面的位置。
ansys接触应力
一般的接触分类 (2)ANSYS接触能力 (2)点─点接触单元 (2)点─面接触单元 (2)面─面的接触单元 (3)执行接触分析 (4)面─面的接触分析 (4)接触分析的步骤: (4)步骤1:建立模型,并划分网格 (4)步骤二:识别接触对 (4)步骤三:定义刚性目标面 (5)步骤4:定义柔性体的接触面 (8)步骤5:设置实常数和单元关键字 (10)步骤六: (21)步骤7:给变形体单元加必要的边界条件 (21)步骤8:定义求解和载步选项 (22)第十步:检查结果 (23)点─面接触分析 (25)点─面接触分析的步骤 (26)点-点的接触 (35)接触分析实例(GUI方法) (38)非线性静态实例分析(命令流方式) (42)接触分析接触问题是一种高度非线性行为,需要较大的计算资源,为了进行实为有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在你求解问题之前,你不知道接触区域,表面之间是接触或分开是未知的,突然变化的,这随载荷、材料、边界条件和其它因素而定;其二,大多的接触问题需要计算摩擦,有几种摩擦和模型供你挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
一般的接触分类接触问题分为两种基本类型:刚体─柔体的接触,半柔体─柔体的接触,在刚体─柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体─柔体的接触,许多金属成形问题归为此类接触,另一类,柔体─柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS接触能力ANSYS支持三种接触方式:点─点,点─面,平面─面,每种接触方式使用的接触单元适用于某类问题。
为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用的其中之一是一点,模型的对立应组元是一个结点。
ANSYS 自动接触技术

ANSYS自动接触技术安世亚太(ANSYS-CHINA)广州办事处林翰现代CAE技术可以对相当大规模的问题进行分析,而且这种分析可以是复杂的接触问题(在CAD中称为“装配”)。
利用仿真手段可以对具有大量零部件的虚拟样机整机进行虚拟试验。
但是由于零部件的装配在CAE中需要进行“接触”分析,而接触分析需要建立接触单元。
此过程在其他CAE软件中采用手工方式完成,一个虚拟整机的建立所需要的时间令人不可接受。
因此,CAE软件的自动探测装配关系的能力决定了能否进行虚拟样机性能仿真,是我们真正发挥CAE软件的优势的关键技术之一。
ANSYS公司提供的CAD模型“链接”技术,在建立装配模型“链接”的过程中,自动探测装配关系,同时完成“接触”单元的建立,无需人工干预。
本文将对ANSYS的这一独有概念进行阐述。
一.ANSYS协同仿真环境与装配体模拟中的人为干预提到CAD与CAE技术当中的这一“自动探测装配”概念,首先需要引入ANSYS给业界带来的“协同仿真环境”这一概念,本文中介绍的所有内容,都将在这一大范畴下得以实现。
现代CAE技术的繁荣昌盛为用户带来宽广选择余地的同时也带来了产品仿真的协同需求。
各种CAE程序单打独斗的时代即将过去,这些程序之间的合作将是今后CAE发展的主要方向。
现在CAE世界期待一个可以整合所有CAE技术资源和数据的协同仿真环境。
ANSYS Workbench作为世界唯一一款协同仿真平台,旨在搭建基于网络的仿真工作统一环境,将百家争鸣的仿真技术和纷繁复杂的仿真数据完美整合,与仿真相关的人、部门、技术及数据在统一环境中协同工作。
协同是现代产品设计流程发展的必然需求。
时下流行的PDM满足了产品的协同设计需求,Workbench满足了产品协同仿真需求,开创仿真新纪元。
在中国航空、航天、船舶等高科技行业,企业或研究所通常会拥有多种商业CAE程序甚至自己开发一些小型CAE软件,协同仿真环境将为他们整合仿真技术提供极大方便。
最新ANSYS 中使用接触向导定义多个接触对详细实例(图文)资料

ANSYS 中如何使用接触向导定义接触对在ANSYS 中定义接触通常有两种方法:1. 用户自己手工创建接触单元和目标单元。
这种方法,在定义接触和目标单元时还比较简单,但是在设置或修改单元属性和定义实常数时却比较复杂。
需要用户对接触有较深刻的理解和通过实践积累丰富的经验。
2. 使用接触管理器中的接触向导定义接触对:使用接触管理器 (接触向导) 定义接触对(即接触单元和目标单元) 时,可以定义除了点-点接触以外的各种接触类型;它可以自动生成接触单元和目标单元,并提供了一组默认的单元属性和实常数值。
使用这些默认的设置,加上适当的求解设置,对于多数接触问题都能够获得收敛的结果。
而且,如果使用默认设置时,计算不收敛或对结果不太满意,也可以通过接触管理器(接触向导) 对单元属性和实常数方便的进行修改和调整。
因此,我们推荐,在可能的情况下,尽量使用接触管理器(接触向导) 来定义接触。
本文将通过一个实例介绍接触管理器的基本使用方法。
所使用的例子如下:两块平板,中间夹一个圆球。
上面平板的上表面承受压力,分析模型的变形和应力随压力的变化。
两块平板,尺寸都是(100*100*20),相距100。
中间夹一个半径50 的圆球。
两个平板分别与圆球的上下边缘接触。
尺寸单位为mm。
几何模型如图1。
图 1 中,为了能够划分映射网格,分别对体积进行了切割材料属性为:两块平板: E = 201000 Mpa;μ= 0.3圆球: E = 70100 Mpa;μ= 0.33接下来对各个Volumes 划分网格,单元类型采用solid186 (20 节点六面体),单元边长统一取 6 mm。
网格划分结果如图 2 所示:载荷为上平板上表面均布压力,最大值10 Mpa;约束条件将在后面介绍。
以下介绍如何使用接触管理器 (接触向导) 来分析这一接触问题。
一、使用接触管理器 (接触向导) 前的准备工作1. 在ANSYS 中,接触单元和目标单元必须覆盖在已有的单元表面上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
……………………………………………………………最新资料推荐………………………………………………… 1 / 701 / 701 / 70 参考ANSYS的中文帮助文件 接触问题(参考ANSYS的中文帮助文件) 当两个分离的表面互相碰触并共切时,就称它们牌接触状态。在一般的物理意义中,牌接触状态的表面有下列特点: 1、 不互相渗透; 2、 能够互相传递法向压力和切向摩擦力; 3、 通常不传递法向拉力。 接触分类:刚性体-柔性体、柔性体-柔性体 实际接触体相互不穿透,因此,程序必须在这两个面间建立一种关系,防止它们在有限元分析中相互穿过。 ――罚函数法。接触刚度 ――lagrange乘子法,增加一个附加自由度(接触压力),来满足不穿透条件 ――将罚函数法和lagrange乘子法结合起来,称之为增广lagrange法。 三种接触单元:节点对节点、节点对面、面对面。 接触单元的实常数和单元选项设置: FKN:法向接触刚度。这个值应该足够大,使接触穿透量小;同时也应该足够小,使问题没有病态矩阵。FKN值通常在0.1~10之间,对于体积变形问题,用值1.0(默认),对弯曲问题,用值0.1。 FTOLN:最大穿透容差。穿透超过此值将尝试新的迭代。这是一个与接触单元下面的实体单元深度(h)相乘的比例系数,缺省为0.1。此值太小,会引起收敛困难。 ICONT:初始接触调整带。它能用于围绕目标面给出一个“调整带”,调整带内……………………………………………………………最新资料推荐………………………………………………… 2 / 702 / 702 / 70 任何接触点都被移到目标面上;如果不给出ICONT值,ANSYS根据模型的大小提供一个较小的默认值(<0.03= PINB:指定近区域接触范围(球形区)。当目标单元进入pinball区时,认为它处于近区域接触,pinball区是围绕接触单元接触检测点的圆(二维)或球(三维)。可以用实常数PINB调整球形区(此方法用于初始穿透大的问题是必要的) PMIN和PMAX:初始容许穿透容差。这两个参数指定初始穿透范围,ANSYS把整个目标面(连同变形体)移到到由PMIN和PMAX指定的穿透范围内,而使其成为闭合接触的初始状态。初始调整是一个迭代过程,ANSYS最多使用20个迭代步把目标面调整到PMIN和PMAX范围内,如果无法完成,给出警告,可能需要修改几何模型。 TAUMAX:接触面的最大等效剪应力。给出这个参数在于,不管接触压力值多大,只要等效剪应力达到最大值TAUMAX,就会发生滑动。该剪应力极限值通常用于接触压力会变得非常大的情况。 CNOF:指定接触面偏移。+CNOF增加过盈、-CNOF减少过盈或产生间隙、CNOF能与几何穿透组合应用。 FKOP:接触张开弹簧刚度。针对不分离或绑定接触模型,需要设置实常数FKOP,该常数为张开接触提供了一个刚度值。FKOP阻止接触面的分离;FKOP默认为1.0,用于建立粘结模型,用一个较小值(1e-5)去建立软弹簧模型。 FKT:切向接触刚度。作为初值,可以采用-FKT=0.01*FKN,这是大多数ANSYS接触单元的缺省值。 COHE:粘滞力。即没有法向压力时开始滑动的摩擦应力值。 FACT,DC:定义摩擦系数变化规律 ……………………………………………………………最新资料推荐………………………………………………… 3 / 703 / 703 / 70 MU=MUK*(1+(FACT-1)EXP(-DC*vtfs/deltaT)) 式中: MUK=动摩擦系数(用户自己定义) FACT=MUS/MUK(用户自己定义) MUS=静摩擦系数 DC=衰减系数(用户自己定义) Vtfs/deltaT=表面间的相对速度 注意:动摩擦系数由被指定为材料属性(MU),由MP命令或GUI定义。缺省值:FACT=1,MUS=MUK=0,DC=0
Keyopt的介绍,以Target170,Conta173为例:
首先介绍170的Keyopt KEYOPT(3):定义接触行为 KEYOPT(1):单元阶数(是否含有中节点) KEYOPT(1)=0:低阶单元(不含中节点) KEYOPT(1)=1:高阶单元(含中节点) KEYOPT(2):刚体目标面约束条件 =0时,自动约束选项,每一个载荷步的末尾,程序内部将是性面重新设置约束。 满足以下条件,刚性面则缺省为自动约束 没有明确定义边界条件; 目标面与其它单元没有联系; 没有定义耦合或约束方程。 =1时,用户定义选项。 ……………………………………………………………最新资料推荐………………………………………………… 4 / 704 / 704 / 70 Conta173的Keyopt: KEYOPT(1):自由度选项。=0时,结构:UX,UY,和UZ;=1时,结构和热;=2时,TEMP(用于纯热接触问题) KEYOPT(2):选择接触算法。=0时,增广的拉格朗日法(缺省选项),推荐于一般应用,它对罚刚度不太敏感,但是也要求给出一个穿透容差。=1时,罚函数法。它推荐应用于单元非常扭曲、大摩擦系数和用增广的拉格朗日法收敛行为不好的问题。 KEYOPT(4):选择接触检查点。=0时,高斯点(缺省选项,推荐);=1时,节点;ANSYS面对面单元默认用高斯积分点作为接触检查点。 KEYOPT(5):自动CNOF调整。允许ANSYS基于初始状态自动给定CNOF值――导致“刚好接触”配置。=0时,不进行自动调整;=1时,闭合间隙;=2时,减小穿透;=3时,闭合间隙/减小穿透。 KEYOPT(7):时间步控制选项。(只有在Solution Control中打开基于接触状态变化的时间步预测,此选项才起作用。Solution>Unabridged Menu>Load Step Opts>Solution Ctrl =0时,不控制,不影响自动时间步长。对静力问题自动时间步打开时此选项一般是足够的。 =1时,自动二分,如果接触状态变化明显,时间步长将二分,对于动力问题自动二分通常是足够的; =2时,合理值。比自动细分更耗时的算法; =3时,最小值。此选项为下一子步预测最小时间增量(很耗机时,不推荐)。 KEYOPT(8):防止伪接触选项。=0时,不防止;=1时,检测并忽略伪接触。 ……………………………………………………………最新资料推荐………………………………………………… 5 / 705 / 705 / 70 KEYOPT(9):初始穿透间隙控制。=0时,包括几何穿透/间隙和CNOF;=1时,忽略几何穿透/间隙和CNOF;=2时,包括几何穿透/间隙和CNOF,且在第一个载荷步中渐变;=3时,忽略几何穿透/间隙,包括CNOF;=4时,忽略几何穿透/间隙,包括CNOF,且在第一个载荷步中渐变。 KEYOPT(10):接触刚度更新控制。=0,闭合状态的接触刚度不进行任何更新;=1,每一载荷步更新闭合状态的接触刚度(FKN或FKT,由用户指定);=2,与=1同,此外,在每一子步,程序自动更新接触刚度(根据变形后下伏单元的刚度)。 KEYOPT(11):壳、梁单元厚度影响。 如果已经创建了一个梁或壳单元模型,接触表面能够偏置,用于考虑梁或壳的厚度。=0,在中面接触(默认);=1,在指定表面的顶部或底部。 注意:当用SHELL181单元时,由于大应变变形引起的厚度改变也被考虑。 KEYOPT(12):创立不同的接触表面相互作用模型。 =0,标准的接触行为,张开时法向压力为0; =1,粗糙接触行为,不发生滑动(类似无限摩擦系数); =2,不分离,允许滑动; =3,绑定接触,目标面和接触面一旦接触就粘在一起; =4,不分离接触(总是),初始位于pinball区域内或已经接触的接触检查点在法向不分离; =5,绑定接触(总是),初始位于pinball区域内或已经接触的接触检查点总是与目标面绑定在一起; =6,绑定接触(初始接触),只在初始接触的地方采用绑定,初始张开的地……………………………………………………………最新资料推荐………………………………………………… 6 / 706 / 706 / 70 方保持张开。 ……………………………………………………………最新资料推荐…………………………………………………
7 / 707 / 707 / 70 5.1 概述 接触问题是一种高度非线性行为,需要较多的计算机资源。为了进行切实有效的计算,理解问题的物理特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在用户求解问题之前,用户通常不知道接触区域。随载荷、材料、边界条件和其它因素的不同,表面之间可以接触或者分开,这往往在很大程度上是难以预料的,并且还可能是突然变化的。其二,大多数的接触问题需要考虑摩擦作用,有几种摩擦定律和模型可供挑选,它们都是非线性的。摩擦效应可能是无序的,所以摩擦使问题的收敛性成为一个难点。
注意 --如果在模型中,不考虑摩擦,且物体之间的总是保持接触,则可以应用约束方程或自由度藕合来代替接触。约束方程仅在小应变分析( NLGEOM ,off)中可用。见《ANSYS Modeling and Meshing Guide》中的§12,Coupling and Constraint Equations。
除了上面两个难点外,许多接触问题还必须涉及到多物理场影响,如接触区域的热传导、电流等。