人体红外图像序列威胁行为理解
人体运动追踪技术的原理与实现步骤
人体运动追踪技术的原理与实现步骤人体运动追踪技术是一种通过计算机视觉和图像处理技术对人体运动进行实时跟踪和分析的技术。
它在许多领域中有着广泛的应用,如体育训练、医疗康复、安防监控等。
本文将介绍人体运动追踪技术的原理和实现步骤。
一、原理1. 图像采集:人体运动追踪技术首先需要获取人体运动的图像或视频。
通常使用摄像机、深度相机或红外热像仪等设备进行图像的采集。
这些设备能够捕捉到人体运动时的位置、姿态、速度等信息。
2. 特征提取:从采集到的图像中提取出与人体有关的特征。
这些特征可以是人体关节的位置、骨骼的姿态、身体的形状等。
通常使用计算机视觉和图像处理技术来进行特征提取,例如边缘检测、图像分割等算法。
3. 运动估计:根据特征的变化来估计人体的运动。
通过分析特征在连续帧之间的差异和变化,可以计算出人体的运动轨迹和轨迹的速度。
常用的运动估计算法包括光流法、KLT算法等。
4. 姿态估计:根据人体的运动估计出人体的姿态。
姿态估计是一个复杂的问题,通常需要先推测人体的骨骼结构,再通过寻找最佳匹配的方法来估计人体的姿态。
现在常用的姿态估计算法有基于模型的方法、基于深度学习的方法等。
二、实现步骤1. 数据采集:使用合适的设备对人体的运动进行采集。
常见的设备包括摄像机、深度相机、红外热像仪等。
采集时需要注意灯光、背景等环境因素的影响,确保图像的质量和准确性。
2. 特征提取与选择:根据具体的应用需求选择合适的特征。
例如,如果需要检测人体的关节位置和姿态,可以选择提取关节点的坐标信息。
如果需要检测人体的形状和轮廓,可以选择进行图像分割和形态学处理。
3. 模型训练与优化:根据采集到的数据进行模型的训练和优化。
常见的方法有机器学习算法和深度学习算法。
在训练时需要对数据进行预处理、特征选择和模型调优,以提高运动追踪的准确性和鲁棒性。
4. 运动追踪与分析:使用训练好的模型对实时的图像或视频进行运动追踪和分析。
根据采集到的特征,计算人体的运动轨迹、姿态和速度等信息。
基于视频的人体异常行为识别与检测方法综述

基于视频的人体异常行为识别与检测方法综述一、本文概述随着视频监控技术的广泛应用和技术的快速发展,基于视频的人体异常行为识别与检测已成为当前研究的热点和难点问题。
该技术旨在通过分析监控视频,自动检测并识别出人体的异常行为,如暴力行为、跌倒、异常行走姿势等,从而为安全监控、智能监控等领域提供有效的技术支持。
本文旨在综述基于视频的人体异常行为识别与检测技术的研究现状、发展趋势以及面临的挑战,以期为后续研究提供参考和借鉴。
本文首先介绍了基于视频的人体异常行为识别与检测的基本概念和研究意义,阐述了该技术在安全监控、智能交通、医疗护理等领域的应用价值。
接着,本文综述了近年来国内外在该领域的研究进展,包括基于传统图像处理的方法、基于机器学习的方法以及基于深度学习的方法等。
在此基础上,本文分析了各种方法的优缺点,并指出了当前研究中存在的问题和挑战。
本文展望了基于视频的人体异常行为识别与检测技术的发展趋势和未来研究方向,以期为相关领域的研究人员提供有益的参考和启示。
二、人体异常行为识别与检测的基本理论人体异常行为识别与检测是计算机视觉和领域的重要研究方向,其基本理论涉及多个学科的知识。
本部分将介绍人体异常行为识别与检测的基本理论,包括人体行为的表示、特征提取、行为分类与识别以及异常检测的基本原理。
人体行为的表示是实现异常行为识别与检测的基础。
人体行为可以通过多种方式表示,如时空轨迹、姿态序列、骨骼点运动等。
这些表示方法旨在捕捉人体行为的时空特性和动态变化,为后续的特征提取和分类提供基础。
特征提取是行为识别与检测的关键步骤。
通过对人体行为的表示进行特征提取,可以提取出行为的关键信息,如运动模式、姿态变化、行为速度等。
这些特征对于区分正常行为和异常行为至关重要。
常见的特征提取方法包括时域分析、频域分析、运动轨迹分析、姿态分析等。
接下来,行为分类与识别是异常行为检测的核心环节。
通过利用机器学习、深度学习等分类算法,将提取出的特征输入到分类器中,实现对人体行为的分类与识别。
摔倒行为视频监控及报警系统

第14卷㊀第2期Vol.14No.2㊀㊀智㊀能㊀计㊀算㊀机㊀与㊀应㊀用IntelligentComputerandApplications㊀㊀2024年2月㊀Feb.2024㊀㊀㊀㊀㊀㊀文章编号:2095-2163(2024)02-0114-04中图分类号:TN948.6文献标志码:A摔倒行为视频监控及报警系统赵㊀琴1,赵团结1,郑新桥1,秦㊀琴1,龙㊀念1,邓㊀超2,3(1武昌工学院国际教育学院,武汉430065;2武汉科技大学汽车与交通工程学院,武汉430065;3武汉科技大学智能汽车工程研究院,武汉430065)摘㊀要:针对当前视频监控系统对摔倒行为识别率低的情况,本文提出了一种摔倒行为实时监控预警的方法,解决了视频监控系统对摔倒行为误报㊁漏报等问题㊂首先,采用图像识别的方法对人的动作方向特征进行提取;其次,基于运动方向的隐马尔科夫模型(HMM)进行动作分割,在视频中分割出人的一些常见的动作;最后,依据这些动作的组合判断下一时刻是否存在摔倒行为,进而发出警报㊂该监控预警方法可对进入监控区的人与其他物体域进行自动区分,为行为监控系统提供一种理论依据㊂关键词:摔倒行为;监控系统;图像识别;隐马尔科夫模型VideomonitoringandalarmsystemforfallbehaviorZHAOQin1,ZHAOTuanjie1,ZHENGXinqiao1,QINQin1,LONGNian1,DENGChao2,3(1InternationEducationCollege,WuchangInstituteofTechnology,Wuhan430065,China;2CollegeofAutomobileandTrafficEngineering,WuhanUniversityofScienceandTechnology,Wuhan430065,China;3IntelligentAutomobileEngineeringResearchInstitute,WuhanUniversityofScienceandTechnology,Wuhan430065,China)Abstract:Thispaperproposesamethodforreal-timemonitoringandearlywarningoffallbehavior,addressingissuessuchasfalsealarmsandmisseddetectionsincurrentvideosurveillancesystems.Initially,imagerecognitiontechniquesareemployedtoextractfeaturesrelatedtothemovementdirectionofindividuals.Subsequently,aHiddenMarkovModel(HMM)basedonmotiondirectionisusedforactionsegmentation,isolatingcommonmovementsofpeopleinthevideo.Finally,basedonthecombinationofthesemovements,thesystempredictspotentialfallbehaviorinthenextmomentandtriggersanalarm.Thismonitoringandearlywarningmethodcanautomaticallydistinguishbetweenpeopleandotherobjectsenteringthemonitoredarea,providingatheoreticalbasisforbehavioralmonitoringsystems.Keywords:fallbehavior;monitoringsystem;imagerecognition;HiddenMarkovModel基金项目:武昌工学院科学研究项目(2022KY24);交通行业重点实验室开放课题(JTZL2205);四川省无人系统智能感知控制技术工程实验室开放课题(WRXT2022-001);教育部产学合作协同育人项目(230803612214746);云基物联网高速公路建养设备智能化实验室开放课题(KF_2022_301002)㊂作者简介:赵㊀琴(1986-),女,学士,助理实验员,主要研究方向:智能化设备㊂通讯作者:邓㊀超(1986-),男,博士,副教授,主要研究方向:自动驾驶㊂Email:woec@wust.edu.cn收稿日期:2023-02-210㊀引㊀言目前国内外很多科研工作者致力于运动分析,也取得了一定的进展㊂国外许多高校和研究所,如麻省理工学院㊁牛津大学等都专门设立了针对运动目标检测的研究组或者研究实验室㊂美国国防高级研究项目署和几家著名研究机构合作,联合研制用于未来城市和战场环境下的人类行为的视频监控系统VSAM(VideoSurveillanceandMonitoring)[1];中国对于智能化监控技术的发展也给予了高度重视,国家高技术研究发展计划(863计划)开展了多项重大课题的研究,公安部也为此在全国开展城市报警与监控系统建设 3111 试点工程[2];中国科学院自动化研究所的研究取得了重大进展,研究成果包括智能监控系统平台㊁目标异常行为的识别与报警㊁人和车辆的多目标检测跟踪与分类㊁人体异常动作识别报警等[3]㊂虽然对于人体行为识别的研究取得了一定的成果,但是现阶段依然面临着很多的问题和难点,例如不加约束的运动目标检测㊁多种特征的融合㊁行为的分层识别等等㊂现在已经可以识别一些基本的动作,如走㊁跑㊁跳㊁挥手等,但是如何识别一系列的动作所组成的行为仍然是一个值得研究的问题㊂为此,本文采用基于运动方向的隐马尔科夫(HMM)动作分割的方法,设计了一个拍摄及报警装置,通过融合已有的一些特征对人体不同动作进行合理表达㊂融合后的特征将能够对人体的不同动作敏感,且维数在合理范围内㊂1㊀算法设计视频监控系统应该具有以下功能:能够连续实时地对室内的场景进行监视,自动分析摄像机所采集的图像信息㊂当有人进入监控区域时,监控系统能自动区分人与其他物体,并能够在视频中分割出人的一些常见的动作,依据这些动作的组合判断人的行为,进而判断行为是正常还是异常,如果异常就发出警报㊂视频监控系统的核心为异常状态的识别㊂研究发现,人的运动行为中行走㊁摔倒㊁蹲下㊁站起㊁躺着不动等几个有代表性的行为动作,对于将要检测的几个基本动作,在运动方向上大都有较大的差异㊂由于蹲下和摔倒两个动作的运动方向都是向下的,同一个方向的动作只能导致一种运动结果,因此,这两个动作不可能是连续发生的㊂为了找出待检测动作的大致运动方向,对动作所导致的结果进行分类㊂因此,可先对全局保存一定时间的运动方向,再设置一个阈值,找出运动方向与待检测动作的对应关系,若在短期内运动方向的变化超过这个阈值,就是一个新的动作㊂阈值的设置是一个难题,太大会无法分割动作或分割的不准确,太小则会出现将一个动作分割成多个动作的情况㊂而使用运动方向的变化率来分割,在某些情况下会发生错误,如在摔倒的过程中,运动方向的变化率就比较大㊂待检测动作的大致运动方向见表1㊂表1㊀待检测动作的大致运动方向Table1㊀Approximatedirectionofmotion待检测动作大致运动方向行走水平摔倒向下蹲下向下站起向上躺着不动无㊀㊀研究发现动作是存在潜在联系的,可以做出一个变量在不同的特征之间转移的状态转移图,并由这个图统计出当前状态发生时下一个状态发生的概率㊂大多数情况下,有些潜在危险状态是不能被观测到的,例如:当只能观测到行为的表现,却想要推测当前的行为是否异常时,此时潜在危险(异常)状态是由当前的行为状态推测出来的㊂为了能够从行为的动作序列得到行为的危险状态序列,采用基于运动方向的隐马尔科夫模型(HMM)进行动作分割㊂HMM模型可以用5个元素来描述,包括2个状态集合和3个概率矩阵,A=[aij]为隐含状态转移概率矩阵,描述了HMM模型中各个状态之间的转移概率;B=[bj]为观测状态转移概率矩阵,初始状态概率矩阵πi=γ1(i)表示隐含状态在初始时刻t=1的概率矩阵;S为隐含状态,通常无法通过直接观测而得到;O为可观测状态,在模型中与隐含状态相关联,可通过直接观测而得到㊂首先进行初始化:当t=1时处于隐含状态Si的期望值,HMM三元组λ=(A0,B0,π);其次,进行迭代计算,令ξt(i,j)表示t时状态为Si以及t+1时状态为Sj的概率,αt(i)表示在t时刻,观测序列O={ot+1,ot+2, ,oT}状态为qi的概率,βt(i)表示在t时刻状态为qi的条件下从t+1到T时刻部分观测序列为O的概率,ε是预先设定的阈值终止条件:|lgP(O|λ)-lgP(O|λ0)|<ε㊂在HMM模型λ和观测序列O下,在t时刻状态为qi且t+1时刻状态为qj的概率,公式(1):ξt(i,j)=P(qt=i,qt+1=j,O|λ)P(O|λ)=αt(i)aijbj(ot+1)βt+1(j)ðNi,j=1αt(i)aijbj(ot+1)βt+1(j)(1)t时刻处于状态Si和Sj的概率,公式(2)和公式(3):γti()=ðNj=1ξti,j()(2)γtj()=ðNi=1ξti,j()(3)㊀㊀对状态进行重估,A和B的期望,公式(4)和公式(5):a-ij=ðT-1i=1ξt(i,j)/ðT-1i=1γt(i)(4)b-j(k)=ðT-1i=1,Ot=Vkγt(j)/ðTi=1γt(i)(5)㊀㊀其中,ðT-1i=1ξti,j()表示从Si转换到Sj次数的预期,ðT-1i=1γti()表示整个过程中从状态Si转出次数的预期㊂通过一段时间内的动作序列推测出危险行为的状态序列㊂将HMM应用到动作分割中时,可以将人体的动作视为隐变量,将运动方向的角度量化成12等分,作为可以观测到的变量㊂要识别的动作的状态转移图如图1所示,由此可以建立一个关于动511第2期赵琴,等:摔倒行为视频监控及报警系统作状态转移的HMM模型,通过角度的变化判断出当前的动作,既实现了动作分割,也实现了动作识别㊂完成视频中的动作分割后,再将这些动作与已有的动作特征进行比对和验证,从而得到人体的动作特征㊂例如,当观测到了 行走 摔倒 躺着不动 或 行走 摔倒 站起 的动作序列时,通过动作状态转移的HMM模型可以算出摔倒的概率极大,推测出即将出现一个危险状态㊂这时触发报警电路,发出警报,并通过短信猫发送短信㊂摔倒站起蹲下行走躺着不动图1㊀动作状态转移图Fig.1㊀Actionstatetransition2系统设计本系统主要包括识别摔倒行为及发出警报两个关键环节,由3个模块构成:感知模块㊁监控识别模块㊁报警模块㊂感知模块由红外感应装置和摄像头组成,当红外检测装置检测出来有生命体后,计算机唤醒摄像头,开始接收摄像头传来的视频数据;报警模块由报警电路和短信猫组成,主要作用是发出警报;监控识别模块由单片机和信号处理电路组成,单片机可以控制位于室内的红外检测装置和室外的报警电路,若检测出此生命体不是人体,则使摄像头休眠,关闭摄像头等待下一次的唤醒,否则继续进行识别㊂若识别出摔倒行为,则发送信号给单片机,使其驱动报警电路,并通过短信猫报警㊂硬件实物和系统设计如图2㊁图3所示㊂单片机短信猫摄像头红外感应装置声光报警器图2㊀硬件实物图Fig.2㊀Hardwareconnection报警电路运算放大器I/O口I/O口串口通讯I/O口单片机需要发出警报时即发出高电平信号输出红外检测的输出信号串口通讯红外检测装置检测信号输出端口摄像头视频信号发送端口串口通讯U S B接口U S B接口U S B接口计算机A T指令接收端口短信发送端口短信猫系统设计图图3㊀系统设计图Fig.3㊀Systemdesign2.1㊀单片机控制模块单片机控制模块包含对报警电路的控制以及对红外检测装置的控制㊂本文采用可编程的单片机来控制报警电路和红外检测电路,使单片机与计算机通讯达到理想的效果㊂单片机采用STC90C52,报警电路选用三极管运放进行放大,再连接一个蜂鸣器611智㊀能㊀计㊀算㊀机㊀与㊀应㊀用㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第14卷㊀即可㊂红外检测装置利用热继电传感器将人体发出的红外光转换成电信号㊂首先,通过带通放大器来放大热继电传感器输出的脉冲电压;其次,通过比较器来抑制噪声,从而在触发单稳态电路时,消除了噪声的干扰;最后,通过光控电路及输出电路控制输出,控制蜂鸣器工作㊂红外检测模块的工作原理如图4所示㊂菲涅尔透镜热继电传感器带通放大器比较器光控电路输出电路图4㊀红外检测原理图Fig.4㊀Schematicofinfrareddetection㊀㊀红外检测装置采用菲涅尔透镜聚焦人体辐射的红外线,提高人体探测的灵敏度㊂红外检测模块选用HC-SR501,这个模块有两种工作方式:第一种是不可重复触发方式,即感应输出高电平,延迟一段时间后,再由高电平变为低电平;第二种是可重复触发方式,若一直感应到红外线,则一直输出高电平㊂一旦没有感应到红外线,则输出低电平㊂本文选用第二种工作方式㊂由于HC-SR501输出时高电平为3.3V,低电平为0V,因而可以直接将HC-SR501的输出与单片机的I/O口连起来㊂人体感应模块的参数见表2㊂表2㊀人体感应模块参数表Table2㊀Parameterofhumansensingmodule项目参数产品型号HC-SR501工作电压直流电压4.5 20V静态电流<50μA电平输出高3.3V/低0V触发方式L不可重复触发/H可重复触发延时5 200s封锁时间2.5s(可调)电路板外形32ˑ24mm感应角度<100ʎ锥角工作温度-15ħ 70ħ感应透镜直径23mm(默认)2.2视频采集模块视频采集模块包括镜头㊁电荷耦合元件(CCD)㊁数字信号处理芯片(DSP)3个部分㊂首先,通过镜头将光学图像转化为电信号;其次,在CCD中经过A/D转换为数字图像信号;最后,将数字图像信号发送到DSP中处理,通过显示器观察图像㊂感光芯片的选择对于摄像效果影响较大,目前的感光芯片分为两类,一种是CCD,另一种是CMOS(金属氧化物半导体元件)㊂CCD灵敏度高,信噪比较大,摄像效果比较好,缺点是成本较高;CMOS集成度高,功耗低,成本低,但噪声比较大,灵敏度低㊂由于本文对于图像画面有一定的要求,故选用CCD㊂2.3㊀短信发送模块短信发送模块(短信猫)是用来收发短信的设备,需要手机SIM卡的支持,短信猫基于工业级的全球移动通信(GSM)技术,内嵌GSM无线通信模块,插入手机SIM卡即可运行,可以与相应的运行商的短信中心建立无线通信,通过本地计算机控制应用系统可实现短信收发功能㊂使用短信猫进行短信发送㊂将手机卡放入短信猫,将短信猫通过USB接口接入电脑,利用串口将AT(终端设备与PC应用之间)指令发送到短信猫中即可实现短信收发,还可使用移动供应商提供的短信猫的接口控制短信的收发㊂3㊀结束语本文提出了一种连续实时地对室内的场景进行监视的方法,设计了一款摔倒行为视频监控及报警系统,可以自动分析摄像机所采集的图像信息,对摔倒行为进行有效识别及报警㊂首先,通过红外检测装置对进入监控区的人与其他物体域进行自动区分;其次,根据人的常见运动方向建立了HMM模型,进行动作分割,判断人的摔倒行为;最后,利用短信发送模块发出警报信息㊂研究结果可为行为监控系统提供一种理论依据㊂未来将开展更多的行为实验,检测与识别更多的异常行为,验证该系统的实时性和识别精度㊂参考文献[1]沈雪松.视频监控中运动目标检测与跟踪研究[D].无锡:江南大学,2019.[2]左国才,苏秀芝,陈明丽,等.基于深度学习抗遮挡的多目标跟踪研究[J].智能计算机与应用,2020,10(7):239-242.[3]陈璐.家庭智能视频监控系统设计[J].智能计算机与应用,2020,10(11):141-143.711第2期赵琴,等:摔倒行为视频监控及报警系统。
【国家自然科学基金】_人体行为识别_基金支持热词逐年推荐_【万方软件创新助手】_20140802
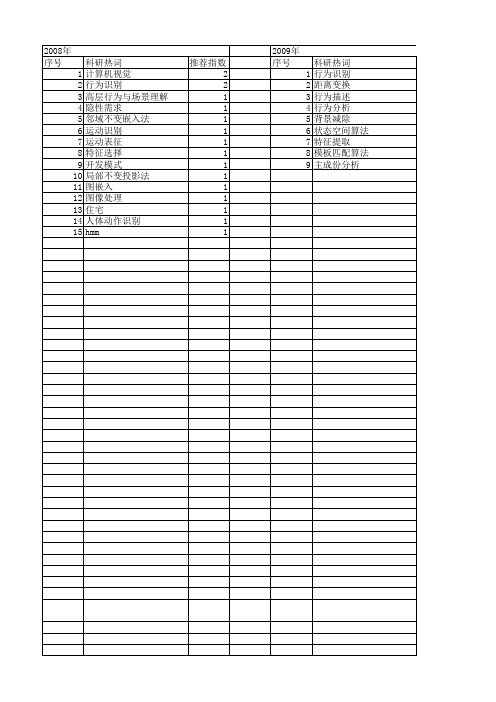
2014年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 5 6 7 8 9
科研热词 行为识别 距离变换 行为描述 行为分析 背景减除 状态空间算法 特征提取 模板匹配算法 主成份分析
推荐指数 2 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
科研热词 推荐指数 行为识别 3 马尔可夫逻辑网 1 陀螺仪 1 链码 1 运动轨迹 1 跌倒检测 1 计算机视觉 1 聚类 1 编辑距离 1 目标跟踪 1 目标检测 1 条件随机场 1 时空特征 1 支持向量机 1 形态学处理 1 张量子空间动态纹理模型 1 动态时间弯折 1 加速度传感器 1 剪影抽取 1 关键姿态 1 人体运动分析 1 人体轮廓 1 交互行为分析 1 二值图像序列 1 二值动态纹理模型 1
科研热词 推荐指数 行为识别 12 隐条件随机场 3 骨架模型 2 隐马尔科夫模型 2 运动特征 2 智能视频监控 2 支持向量机 2 关键姿态 2 人体行为识别 2 人体行为 2 隐马尔可夫模型 1 隐动态条件随机场 1 随机森林 1 随机决策森林 1 阈值选择 1 连续子区间 1 运动能量图像 1 运动捕获数据去噪 1 运动历史/能量图像算法 1 轮廓 1 轨迹分析 1 身体倾角 1 跌倒识别 1 谱聚类 1 计算机视觉 1 视频事件整体描述 1 行人重现识别 1 行为理解 1 行为分析 1 行为分割 1 蚊虫 1 自动式图像分割 1 背景差分 1 聚类 1 耦合隐马尔可夫模型 1 置信度 1 类内类间距离 1 稀疏表达 1 稀疏噪声误差 1 神经元 1 相似性度量 1 生物力学 1 独居老人 1 特征组合 1 特征提取 1 物联网 1 深度数据 1 深度信息 1 活化 1 步态识别 1 梯度方向直方图 1 标记偏差 1
自适应分层阈值的简化PCNN红外人体图像分割

Fe b .2 O 1 3
自适应 分层 阈值 的简 化 P C NN红 外人 体 图像 分 割
周东国, 高 潮, 郭永彩
( 重 庆 大 学 光 电工 程 学 院 光 电技 术 及 系统 教 育 部 重 点 实 验 室 重 庆
( z d g 2 0 0 4 2 5 8 6 @1 6 3 . c o m)
降机 制 , 采 用 神 经 元 点 火 区 域 与 未 点 火 区 域 的 统 计 特 性 构 建 自适 应 分 层 阈值 ; 同 时结 合 神 经 元 同 步 点 火 机 制 并 引 入 最 近邻 均 值 聚类 规 则 控 制 神 经 元 点火 , 以达 到 较 高 的 分 割 精 度 . 在 真 实 红 外 人 体 图像 集 上 与 几 种 图 像 分 割 方 法 进 行
中 图 法分 类 号 :T P 3 9 1 . 4 1
S i m pl i f i e d Pul s e Co u p l e d Ne u r a l Ne t wo r k wi t h Ad a pt i v e Mu l t i l e v e l Th r e s ho l d f o r I n f r a r e d Hu ma n I ma g e S e g me n t a t i o n
4 0 0 0 3 0 )
摘 要 :针 对 红 外 人 体 图 像 中 人 体 目标 亮 度 分 布 不 均 匀且 易 与 背 景 混 叠 等 引起 分 割不 完整 的 问题 , 提 出 一 种 自适 应 分 层 阈值 的简 化 P C NN( S P C NN) 红 外 人 体 图像 分 割 方 法 . 该 方 法摒 弃 了传 统 S P C NN 模 型 中 的 动 态 阈 值 指 数 衰 减 下
一种人体热红外图像拼接及部位划分方法

1College of Information Science and Electronic Engineering, Zhejiang University, Hangzhou, Zhejiang 310027, China; 2College of Computer Science and Information Engineering, Zhejiang Gongshang University, Hangzhou, Zhejiang 310018, China
—————————————————— 收稿日期:2018-12-26; 收到修改稿日期:2019-04-10 基金项目:国家自然科学基金资助项目(61371160);浙江省自然科学基金资助项目(LY18F010007) 作者简介:陈晨涛(1995-),男,硕士研究生,主要从事图像处理方面的研究。E-mail:cct@ 通信作者:沈会良(1974-),男,教授,博士生导师,主要从事多光谱成像、图像处理与计算机视觉方面的研究。E-mail:shenhl@
像进行对齐和融合。在区域划分阶段,通过对人体轮廓线进行极值点扫描确定部位区域关键点,并将人体图像划分成
头部、躯干及四肢等区域。实验表明,本文所提出的红外图像预处理方法能获得满意的图像拼接及部位划分结果,可
有效支持人体温度分布的定量及定性分析。
关键词:红外热图像;图像分割;图像拼接;部位划分;温度分布
180689-1
光电工程 DOI: 10.12086/oee.2019.180689
Keywords: infrared thermal image; image segmentation; image stitching; image partitioning; temperature distribution Citation: Chen C T, Pan Z W, Shen H L, et al. Image stitching and partitioning algorithms for infrared thermal human-body images[J]. Opto-Electronic Engineering, 2019, 46(9): 180689
一种快速红外人体轮廓跟踪算法

中 图分 类 号 :P 9 T 31 文 献标 识码 : A 文 章 编 号 :0 1 4 0 2 1 )50 9 -6 10 — 0 (0 1 0 -0 50 2
Fa t c n o r c n l o ihm o um a d s o t ur t a ki g a g r t f rh n bo y
平 集算 法 的速 度 函数 ; 后 , 用 基于 动态 邻近 区域 的快速 水 平 集 来 演 化 目标 边 界 曲线 以实 现 目标 的轮 廓 然 采
跟踪. 实验结果表明, 该算法能适应 目标尺度的变化 、 目标的分裂或合并, 并获得人体 的精确轮廓. 关键词 :红外图像 ; 人体跟踪 ; 动态邻近 区域 ; 快速 水平集; 轮廓
rg nf t ee s gr h r oe i p p r x ei ns hw ta t s g r h a dp esa e o s l l e a o t po s i t s a e.E p r i a v t l im p dnh me t s o t h oi m cn a a t o h l h ia t l tt c e
_红外人体温度测量系统毕业论文.
陕筋瘗工曙整毕业论文(设计)任务书院(系)机械工程学院_________ 专业班级测控092班__________ 学生姓名石涛___________一、毕业论文(设计)题目_________________ 红外人体温度测量系统的设计_________________________二、毕业论文(设计)工作自2012 年11月19 日起至2013 年6月20日止三、毕业论文(设计)进行地点:_________________ 校内_________________________________________四、毕业论文(设计)的内容要求:1、设计课题简介:人体温度是表征人正常生理活动的重要指标之一,也是临床上诊断疾病需要检测的生理指标之一。
普通的体温计虽然可以准确测量人体温度,但测量时间较长,红外温度测量可以实现非接触、短时间准确测量人体温度,尤其适合在人流密度高、流行病高发区使用。
本次设计要求在熟悉目前红外人体温度测量原理基础之上,完成红外人体温度测量系统方案设计,要求方案能够实现连续测量、数据保存、清零、数据检索、测量前校准、超限报警、系统复位等功能,方案整体简便可行;针对制订出的设计方案,完成硬件电路部分设计(包括数据采集部分、信号调理、数字显示部分设计、元器件选型等),并完成相应的图纸和设计说明书(论文),完成专业外文资料翻译任务。
2、设计内容及要求:1).搜集有关资料,撰写毕业设计开题报告。
2).根据现有条件,在充分了解目前红外温度测量原理的基础上提出合理的系统总体设计方案。
3)•拟定红外人体温度测量系统方案,完成相应的设计计算,绘制方案原理图,硬件接线图,软件设计,硬件搭接、系统联调及标定,要求能够正确实现测量功能。
4)设计说明书:1份。
3、设计说明书格式要求:设计说明书应包括:序言、目录、摘要(中英文)、关键词(中英文)、中图分类号、正文(含设计方案论证、设计及其它说明等)、结束语和参考文献等内容,并按照封页、设计任务书、序言、目录、摘要、关键词、正文、结束语、参考文献和封底的顺序装订。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2012.01 31(1) 兵工自动化
Ordnance Industry Automation ・53・
人体红外图像序列威胁行为理解 李永浩 ,张西红 ,赵欣。,彭涛 (1.军械工程学院研究生管理大队,石家庄050003;2.军械工程学院计算机工程系,石家庄050003; 3.河北测绘局制图院,石家庄050000:4.军械工程学院训练部教育技术中心,石家庄050003)
摘要:为识别人体的威胁行为,对提取的人体红外图像行为序列特征进行研究,提取每一帧图像的HOG特征 并且并联形成序列二维特征。为降低特征维数,对二维图像进行离散余弦变换,使用变换后的包含该二维图像主要 信息的前两列近似代替该图像的主要特征,最终使用最小二乘支持向量机对降维后的多段图像序列进行训练和测试, 并给出最终训练测试结果。结果表明,该特征能实现对几种典型的威胁行为识别。 关键词:红外图像;威胁行为识别;支持向量机;方向梯度直方图;离散余弦变换 中图分类号:TJ03 文献标志码:A
Threat Behavior Identifying to Infrared Image of Human Li Yonghao ,Zhang Xihong ,Zhao Xin ,Peng Tao (1.Administrant Brigade ofPostgraduate,Ordnance Engineering College,Shijiazhuang 050003,China; 2.Dept.ofComputer Engineering,Ordnance Engineering College,Shijiazhuang 050003,China; 3.Dept.ofMapping Institute,Surveying&Mapping Bureau ofHebei,Shijiazhuang 050000,China; 4.Education Technology Center,Dept.ofTraining,Ordnance Engineering College,ShUiazhuang 050003,China)
Abstract:To identify threat behavior of human,researched the feature of infrared image,extracted HOG of every image,propose to extract the human infrared image sequence characteristics which are compressed by discrete cosine transform(DCT),and train suppo ̄vector machine(SVM).Using the first and the second arrange of feature compressed by DC T’finally this feature recognize some typical threat behavior. Key words:infrared image;threat behavior identifying;SVM;histograms of oriented gradients(HOG);DCT
0 引言 为的准确识别。 通过对人体红外图像的分析能够识别出威胁 姿态,及时发现潜在的敌人【1 】,这对打击敌人, 保存我单兵生命至关重要。但如果仅仅对人体威 胁姿态进行识别,还不能达到具体的实战要求, 因为姿态反映的是某一静态的特征,而许多威胁 必须要经过对动作整体的观察和理解才能达到具 体的识别需要。目前对人体行为理解的常用行为 识别方法有:使用模板匹配法(基于时空特征的模 式分析方法)和状态空间法(基于概率的方法)。模 板匹配法虽然计算复杂度低、实现简单,但是对 于噪声和运动时间间隔的变化敏感【3】。状态空间方 法最有代表性的是HMMsL4】,虽然能克服模板匹配 的缺点,并且已得到了广泛的应用,但通常涉及 到复杂的迭代运算。因此,笔者提出提取人体红 外图像序列中每一帧图像的HOG特征,将这些 HOG特征并联组成二维图像。通过识别二维图像 来实现对人体行为的理解,实现了对人体威胁行
1威胁行为分析 行为由一系列的姿态组成【1】,威胁行为由一系列 的人体复杂姿态构成。在文献[1】中,通过对单副人 体红外图像姿态的分析,将人体的行为分为威胁行 为和正常的人体行为,将这些姿态通过一定顺序进 行组合就形成了单兵个体的行为。为了全面反映单 兵的威胁行为,首先对可能存在的威胁行为进行了 分析、提炼,可以划分为以下几种典型的威胁行为: 1)姿态的变化为正常姿态==>正常姿态时,此类 行为可以判定为正常的人体行为,主要有以下可能: ①正面行走; ②侧身移动(向左和向右); ③背对后退; ④正面跑动: ⑤转身(左右前后8种组合); ⑥蹲下到站立(双向); ⑦左跨步和右跨步;
收稿日期:201卜08—23;修回日期:201卜09—2O 基金项目:国家自然科学基金“基于传感器网络的分布式目标检测”资助项目(60672143) 作者简介:李永浩(198O一),男,河南人,硕士,从事图像处理与模式识别研究。 ・54・ 兵工自动化 第31卷 ⑧弯腰直身(双向)。 2 姿态的变化为威胁姿态==>正常姿态时,此类 行为可以判定为溃败的人体行为: ①持枪逃跑; ②背枪逃跑; ③双手持枪逃跑; ④收枪逃跑; ⑤边攻击边逃窜; ⑥弃枪逃跑。 3)姿态的变化为威胁姿态 威胁姿态时,此类 行为可以判定为冲击或者定位攻击的人体行为: ①持枪正面冲击; ②持枪侧面冲击; ③端枪冲击: ④低姿跃进携枪冲击; ⑤背枪跃进; ⑥屈身枪口向下跃进; ⑦高姿匍匐携枪冲击; ⑧侧高姿携枪冲击; ⑨抱枪冲击; ⑩侧姿匍匐冲击; o卧姿匍匐冲击。 4)姿态的变化为正常姿态==>威胁姿态时,此类 行为可以判定为开始实施攻击的人体行为: ①左持枪+右持枪; ②跪姿持枪; ③立姿正面持枪; ④卧姿持枪; ⑤侧身持枪; ⑥连续持枪姿态微变(正面,侧面,蹲姿); ⑦持枪站到蹲下(双向); ⑧侧面到正面持枪转化(双向); ⑨侧面到蹲下持枪转化(双向)。 通过对以上典型行为分析,笔者使用4个客 体人作为采集对象,在红外热成像仪下按照上面 分析的行为进行动作。共采集样本320个,每一 个样本包含30帧的红外图像。使用2个客体的行 为作为训练目标,使用2个客体的行为作为测试 目标。其中一个攻击样本的部分帧如图l所示。
2特征提取和分类方法研究 2.1 并联加权HOG特征表征运动行为
图1 攻击行为红外人体图像
笔者使用图像加权的HOG特征作为每一帧图 像的表征【l】。HOG特征的表示可以用图2简单描 述[5】。从图像零坐标开始,每个相邻8x8的像素为 一个单元,每4个相邻的单元组成一个2x2的块。 这样每个块就与周围的8个块至少有一个单元的重 叠。将每个单元中的每个梯度进行方向投票加权, 如果设为9个方向,那么每个单元就得到9维的特 征向量,将块中的特征向量串联起来,每个块就形 成了4 ̄9=36维的特征向量,求该块的HOG特征能 量作为该块特征的权值。如果是一个64x128的图 像则有7×105个块。将每个块的特征向量串联起来 最终形成l05x36=3 780维的特征向量,这个向量就 是HOG特征,是对图像进行分类的依据。图2是 HOG特征的获取过程。为了增加边缘部分在分类时 的贡献率,更好地表征姿态行,对每一块的特征按
照能量的大小进行加权,这套理论在文献[1】中判断 威胁姿态取得了良好的效果。
一 孽
(a)红外视场中 (b)对滑动窗口 (c)一个单元HOG 分割获取识别对象 中块的描述 特征获取方式
图2 HOG的获取过程 笔者采集的特征描述如下:一段视频包含3O 帧(3 S),将30帧的加权HOG特征并联起来作为表 征行为的方法。每一幅图像的HOG特征表示为: ),n=l,…,3 780。并联起来的加权HOG组成了
一幅二维矩阵: L(1,1) U2,1) L( ,1) L(1,2) L(2,2) L( ,2) i(1,m) L(2,m)
( , ) 第1期 李永浩,等:人体红外图像序列威胁行为理解 ・55・ 其中:n=3 780,m=30。如图3,用图像表示该矩阵。 该图像纵向表征了每一帧图像的姿态,横向则表征 了姿态的变化。所以该二维图像是能够比较客观的 反映人体的行为,通过对该二维图像的识别就能实 现对人体行为的理解。
1 000 2 000 3 000 4 000 5 000 6 000 5 lO l5 20 25 30 图3并联加权HOG特征二维图 2.2行为表征降维处理 由于该二维图像包含的特征太大,直接进行 分类非常困难,而且当维数过高时,分类效果会 减低,甚至不能有效地分类 】。为解决此问题采 用离散余弦变换的方式进行降维。离散余弦变换 为:
D(u,V)= (“) (V)・∑∑l(x,y)x
CO !兰 ±12 XC0S !三 ±121 (2) S—— ———————=一—— —— ———— 一 2 2
0≤U≤N一1.0≤v≤M—I
式中: ( ):j 0 , l,12/N,0 V s N一1
(v):j /j_ ~ 。rM,v 【、,2/M,0 V≤M-I
、Ⅳ为图像长和宽的最大值;D )为变换结果, 也称为I(x,J,)的DCT变换系数。 对该二维图像进行离散余弦变换,变换后生 成与原图像大小一致的矩阵D( ,v)t 。经过余弦变 换后的图像,绝大多数的信息集中在矩阵的前几 列,可以说前几列集中包含了原二维图像的绝大 多数信息,为了直观表示经过离散余弦变换后图 像的能量分布情况,对纵向能量进行了绝对值的 求和,结果如图4。变换后的能量信息集中在前2 列。由于离散余弦变换是可逆的,笔者用前2列 近似表征该3O帧的威胁行为。
二维特征图像列 图4 经过离散余弦变换后二维特征图像的纵向能量分布 2.3支持向量机分类 考虑到支持向量机的处理小样本量的优势,笔 者采用最小二乘多分类支持向量机对采集的样本进 行训练和测试【 。在该分类方法中对4个类别构造 4个支持向量机,每一个支持向量机分别将某一类 的数据从其他类别中分离出来。在测试时,取决策 函数输出值最大的类别为测试样本的类别。其第i 个SVM可通过解决下面的最优化问题得到:
m in,
l
2(w +c i j (3)
其约束条件为: I(w ) 妒(x,)≥1一 ;,Y,=i 1(w ) 妒( ,)≤l+ ;, ,≠j (4)