TMS320C6748开发板教程
STM32_深入浅出(新手必看)资料

STM32学前班教程之一:为什么是它经过几天的学习,基本掌握了STM32的调试环境和一些基本知识。
想拿出来与大家共享,笨教程本着最大限度简化删减STM32入门的过程的思想,会把我的整个入门前的工作推荐给大家。
就算是给网上的众多教程、笔记的一种补充吧,所以叫学前班教程。
其中涉及产品一律隐去来源和品牌,以防广告之嫌。
全部汉字内容为个人笔记。
所有相关参考资料也全部列出。
:lol教程会分几篇,因为太长啦。
今天先来说说为什么是它——我选择STM32的原因。
我对未来的规划是以功能性为主的,在功能和面积之间做以平衡是我的首要选择,而把运算放在第二位,这根我的专业有关系。
里面的运算其实并不复杂,在入门阶段想尽量减少所接触的东西。
不过说实话,对DSP的外设并和开发环境不满意,这是为什么STM32一出就转向的原因。
下面是我自己做过的两块DSP28的全功能最小系统板,在做这两块板子的过程中发现要想尽力缩小DSP的面积实在不容易(目前只能达到50mm×45mm,这还是没有其他器件的情况下),尤其是双电源的供电方式和1.9V的电源让人很头疼。
后来因为一个项目,接触了LPC2148并做了一块板子,发现小型的ARM7在外设够用的情况下其实很不错,于是开始搜集相关芯片资料,也同时对小面积的A VR和51都进行了大致的比较,这个时候发现了CortexM3的STM32,比2148拥有更丰富和灵活的外设,性能几乎是2148两倍(按照MIPS值计算)。
正好2148我还没上手,就直接转了这款STM32F103。
与2811相比较(核心1.8V供电情况下),135MHz×1MIPS。
现在用STM32F103,72MHz×1.25MIPS,性能是DSP的66%,STM32F103R型(64管脚)芯片面积只有2811的51%,STM32F103C型(48管脚)面积是2811的25%,最大功耗是DSP的20%,单片价格是DSP 的30%。
基于TMS320C6748的实时工业以太网EtherCAT主站实现
基于TMS320C6748的实时工业以太网EtherCAT主站实现周永洪s邓蔼仙\郭灿彬2,赵汝焕s蔡伯阶1(1广州数控设备有限公司,广东广州510031;2广东机电职业技术学院,广东广州510515)摘要:文章首先对应用EtherCAT的相关知识进行介绍,然后针对引入EtherCAT的数控系统的实现,提出了一种基于EtherCAT技术的实时通信及 DSP控制的可行系统方案,构建了 EtherCAT主站网络结构, 并重点分析了 EtherCAT主站的 状态机、分布时钟、C o E协议。
关键词:数控系统;EtherCAT总线;主站;T M S320C6748; SYS/BIOS中图分类号:T G659 文献标识码:A文章编号:1673-1131(2017)08-0100-021 EtherCAT简介EtherCAT(以太网控制自动化技术)是由B E C K H O F F自动化公司提出的实时工业以太网技术,进行主站与从站间的 开放网络通信,由EtherCAT技术协会E T G进行管理。
EtherCAT可使用双绞线或光纤电缆进行连接。
通过EtherCAT可以构建多种拓扑结构,比如总线拓扑结构、树形拓扑 结构?菊花链式拓扑结构、蜂窝拓扑结构等。
从主站发出的数 据中贞在经过从站时将读取Output数据,并以同样的方式插入 Input数据。
同时,由于通信协议遵守基于IEEE802.3的标准 以太网协议,因此无需构建新的子总线用于EtherCAT连接。
协议通过各个向以太网帧直接传送、多个子报文构成,各 个报文及4G B过程映像,实现了广播和组播通信的功能。
使用符合100BASE-T X标准的以太网时,缆线的最大长度 可达到100m,整个网络最多可以连接65536个设备,由于EtherCAT采用了 IEEE802.3标准的以太网帧,因此 可以使用标准的网络控制器,所以主站侧无需另外搭设硬件 即可构建系统,从站可以用B E C K H O F F提供的专用芯片、或 者F P G A的IP核来实现,保证数据传输实时性。
TMS320C6748和TMS320C6747芯片对比
TMS320C6748和TMS320C6747芯片对比本文主要是关于TMS320C6748和TMS320C6747的相关介绍,并着重对TMS320C6748和TMS320C6747进行了详尽的对比分析。
TMS320C6748TMS320C6748是德州仪器(TI)推出浮点功能的全新高性能处理器,这款芯片也是业界功耗最低的浮点数字信号处理器(DSP),可充分满足高能效、连通性设计对高集成度外设、更低热量耗散以及更长电池使用寿命的需求。
不仅具备通用并行端口(uPP),同时也是TI 首批集成串行高级技术附件(SATA)的器件。
广州创龙推出的TL6748-EVM评估套件为开发者使用TI TMS320C6748处理器提供了完善的软件开发环境,系统支持:裸机、SYS/BIOS、DSP/BIOS。
提供参考底板原理图,DSP C6748入门教程、丰富的Demo程序、完整的软件开发包,以及详细的C6748系统开发文档,方便用户快速评估TMS320C6748处理器、设计系统驱动及其定制应用软件,也大大降低产品开发周期,让客户产品快速上市。
主要面向电力、通信、工控、音视频处理等数据采集处理行业。
TL6748-EVM评估套件是一个功能丰富的开发板,为嵌入式设计人员提供快捷简单的实践方式来评估TMS320C674x系列处理器,是一个完整的实验评估平台。
规格参数/TMS320C6748处理器TMS320C6748,C6000系列浮点DSP处理器(Pin to Pin兼容OMAPL138,AM1808处理器)主频:456MHz存储器128M/256MByte工业级DDR2128M/256M/512MByte 工业级NAND Flash音频/视频接口1个3.5mm Line in音频输入接口1个3.5mm Mic in音频输入接口。
c6748 nop指令
c6748 nop指令「[c6748 nop指令] 是什么?」首先,我们需要了解什么是[c6748 nop指令]。
在计算机编程领域,nop 指令是一种特殊的指令,用于在程序中产生一个无操作的指令。
nop的全称是No Operation,也被称为空操作或空指令。
nop指令在代码中的作用是为了填充空白区域或者延迟程序执行。
而c6748指的是德州仪器(TI)公司生产的一款数字信号处理器(DSP)。
「为什么使用nop指令?」在某些情况下,编程人员可能需要在程序中插入一些无操作的指令,以便实现某些目的。
以下是使用nop指令的几个常见情况:1. 填充空白区域:在程序中有时会出现一些空白区域,没有任何有效的代码。
这可能是由于代码优化、条件语句的变化或其他原因导致的。
为了保持程序的结构完整性,维护和修改代码时可能会在这些空白区域插入nop 指令。
2. 延迟程序执行:在某些情况下,需要延迟程序的执行,以便等待其他事件的发生。
nop指令可以用来实现这种延迟。
由于nop指令不做任何操作,执行时间非常短,可以用来精确控制程序的执行时间。
「如何使用c6748 nop指令?」在c6748 DSP平台上,使用nop指令非常简单。
下面是一些常见的nop 指令用法和示例:1. 填充空白区域:void myFunction(){一些代码...这是一个空白区域,可以插入nop指令以填充nop();空白区域之后的代码...}2. 延迟程序执行:void delay(int milliseconds){将延迟时间转换为循环次数int loopCount = milliseconds * 1000000 /LOOP_DELAY_TIME;循环指定次数执行nop指令for(int i = 0; i < loopCount; i++){nop();}}在上述示例中,nop()表示使用nop指令。
在c6748 DSP上,这个指令被硬件解释为一个无操作的指令。
简述STM32的使用流程
简述STM32的使用流程1. STM32简介STM32是ST公司推出的一系列基于ARM Cortex-M内核的32位单片机。
它具有低功耗、高性能、丰富的外设资源等特点,广泛应用于物联网、工业自动化、消费电子等领域。
本文将简述STM32的使用流程,帮助初学者快速入门。
2. STM32使用流程2.1. 硬件准备在开始使用STM32之前,我们需要准备相应的开发板和配套硬件。
一般而言,我们可以选择ST公司提供的官方开发板,如STM32F4 Discovery,或者其他厂家提供的兼容开发板。
此外,还需要连接USB数据线、开发板调试接口等。
2.2. 安装开发环境在使用STM32进行开发之前,需要安装相应的开发环境。
ST公司提供了官方的开发工具集STM32CubeIDE,以及其他第三方的开发工具。
根据需求选择合适的工具进行安装。
2.3. 创建工程安装完开发环境后,我们可以开始创建工程。
在STM32CubeIDE中,可以通过以下步骤创建新的工程:1.打开STM32CubeIDE,点击菜单栏中的「File」,选择「New」,然后选择「STM32 Project」;2.在「Project」窗口中,选择合适的设备系列和型号,点击「Next」;3.配置工程的名称和路径,点击「Next」;4.在「Toolchain/IDE」窗口中,选择工具链和调试器,点击「Next」;5.在「Middleware」窗口中,选择需要使用的中间件(可选),点击「Finish」。
2.4. 配置工程创建完工程后,我们需要进行一些基本的配置,以确保工程的正常运行。
主要包括:1.配置时钟:根据需求配置系统时钟,以便外设正常工作;2.配置引脚:根据实际需求配置引脚的功能和模式,如GPIO、USART、SPI等;3.配置中断:根据需要配置中断服务程序,以实现特定功能的响应;4.配置外设:根据需求初始化和配置需要使用的外设,如定时器、ADC、DAC等。
2.5. 编写代码完成工程配置后,我们可以开始编写代码了。
tms320c6748网关板上电时序问题分析
Electronic Technology •电子技术Electronic Technology & Software Engineering 电子技术与软件工程• 113【关键词】DSP 系统 电源设计 时序 分析数字信号处理器芯片公司德州仪器旗下的DSP 已经在网络通信、轨道交通、医疗设备、自动化控制多领域的有着广泛的应用,高集成度同时伴随着单颗处理器芯片的电源种类也变得越来越多,电路系统设计的规模越来越复杂,整板的电源种类也是随之增加,相互间的上电时序问题就显得越来越需要电路设计者引起重视。
1 产品及DSP简介1.1 产品简介网关板是在网络交换中,其作为信任服务设施重要组成部分,实现局域网业务的可控跨域互通和资源安全共享。
器件TMS320C6748在本设计中起到网络节点管理以及用户身份签名认证,以及提供用户人机交互的功能。
1.2 DSP简介TMS320C6748是一款主频300MHZ ,最TMS320C6748网关板上电时序问题分析文/钱臣 吴春鲜高可以超频到450Mhz 的DSP 芯片,内核工作电压1.2V 。
拥有DDR2内存接口,工作电压1.8V 。
外部程序启动接口,工作电压3.3V 。
USB 接口及百兆MAC ,工作电压5V 和2.5V 。
2 问题背景网关板按下电源开关,部分设备不能正常启动,DSP 芯片发热量特别大,测试过程中发现芯片表面温度高达50多度。
部分设备启动正常电压正常。
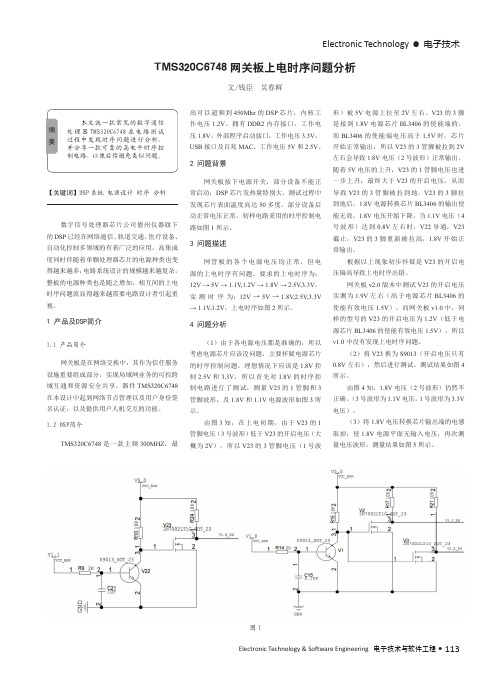
初样电路采用的时序控制电路如图1所示。
3 问题描述网管板的各个电源电压均正常,但电源的上电时序有问题。
要求的上电时序为:12V →5V →1.1V ,1.2V →1.8V →2.5V ,3.3V 。
实测时序为:12V →5V →1.8V ,2.5V ,3.3V →1.1V ,1.2V ,上电时序如图2所示。
4 问题分析(1)由于各电源电压都是准确的,所以考虑电源芯片应该没问题,主要怀疑电源芯片的时序控制问题。
8-DSP子系统
8-DSP⼦系统TMS320C6748 开发视频教程DSP ⼦系统⽬录DSP ⼦系统组成结构12C674x 系列DSP ⽐较3DSP 内部连接TMS320C6748 结构图DSP ⼦系统1、TMS320C674x megamodule内置内存控制器–Level 1 program memory controller (PMC)–Level 1 data memory controller (DMC)–Level 2 unified memory controller (UMC)–Extended memory controller (EMC)–Internal direct memory access (IDMA) controller内置设备模块–Interrupt controller (INTC)–Power-down controller (PDC)–Bandwidth manager (BWM)–Advanced event triggering (AET)2、内置内存TMS320C674x Megamodule 结构图TMS320C6748 DSP 系统内部连接图CPU扩展内存⽀持频率(MHz)HPI IO 电压(V)⽚上L1/SRAM TMS320C6742Async SRAM, SDRAM, DDR2, mDDR, NAND Flash, NOR200 1 16-bit 1.8 V, 3.3 V64 KBTMS320C6743Async SRAM, SDRAM, NAND Flash, NOR200, 375 3.3 V64 KBTMS320C6745Async SRAM, SDRAM, NAND Flash, NOR375, 456 1.8 V, 3.3 V64 KBTMS320C6746Async SRAM, SDRAM, DDR2, mDDR, NAND Flash, NOR375, 456 1 16-bit 1.8 V, 3.3 V64 KBTMS320C6747Async SRAM, SDRAM, NAND Flash, NOR375, 456 1 16-bit 1.8 V, 3.3 V64 KBTMS320C6748Async SRAM, SDRAM, DDR2, mDDR, NAND Flash, NOR375, 456 1 16-bit 1.8 V, 3.3 V64 KB⽚上L2/SRAM 温度(C)峰值MMACSSecurity Enabled Timers64 KB-40 to 105, 0 to 901600 1 64-Bit GP, 1 64-Bit GP/WD 128 KB-40 to 125, 0 to 901600, 3000 1 64-Bit GP, 1 64-BitGP/WD 256 KB-40 to 105, 0 to 853000, 3648 1 64-Bit GP, 1 64-Bit GP/WD 256 KB-40 to 105, -40 to 90, 0 to 903000, 3648 3 64-Bit GP, 1 64-Bit GP/WD 256 KB-40 to 105, 0 to 703000, 3648 1 64-Bit GP, 1 64-Bit GP/WD 256 KB-40 to 105, -40 to 90, 0 to 903000, 3648Yes 3 64-Bit GP, 1 64-Bit GP/WD谢谢观看。
c6748 nop指令 -回复
c6748 nop指令-回复c6748 nop指令的主题,是关于嵌入式系统中的处理器执行指令的一种特殊指令。
在本文中,我将详细解释c6748 nop指令的定义、常见用法和作用,并提供实例来进一步说明其实际应用。
首先,让我们了解一下c6748处理器。
它是德州仪器(Texas Instruments)公司生产的一款高性能数字信号处理器(Digital Signal Processor, DSP)。
该处理器主要用于音频和视觉信号处理领域,例如高清视频编解码、语音识别和音频处理等。
嵌入式系统中广泛采用c6748处理器,因为其强大的并行计算能力和低功耗特性。
对于任何处理器,执行指令是其核心任务之一。
nop指令是汇编指令集中的一种特殊指令,表示“无操作”(No Operation)。
当处理器执行nop 指令时,它将什么都不做,只是简单地继续下一条指令的执行。
这可能看起来没有任何意义,但它在某些情况下发挥着重要的作用。
首先,nop指令可以用来填充指令序列的空隙。
在编写优化的汇编代码时,程序员通常会试图充分利用处理器的并行计算能力,以最大化性能。
然而,有时指令的数量无法完全填满一个并行处理单元(pipeline)的周期(cycle)。
这些不足周期也许是由于程序逻辑上的需要,也可能是由于硬件资源的限制。
在这些情况下,插入nop指令可以使处理器保持忙碌状态,以避免浪费处理周期。
这种方法称为nop插入。
其次,nop指令也可用于调试目的。
在调试嵌入式系统时,程序员通常需要暂停程序执行,以便观察处理器状态或检查程序错误。
使用nop指令可以在程序中插入调试断点,允许程序在执行到断点时暂停。
这可以让开发人员逐步执行代码,并在每一步中查看寄存器内容或内存状态,以帮助定位和解决问题。
因此,nop指令在调试过程中非常有用。
让我们来看几个使用nop指令的实际例子。
假设我们有一个基于c6748处理器的音频应用程序,需要通过一个输入固定的采样值,不断产生一个输出信号。
实验三FIR滤波器的DSP实验报告
实验三FIR滤波器的DSP实验报告实验目的:1.掌握FIR滤波器的基本原理和结构;2.了解DSP芯片的基本使用方法;3.熟悉MATLAB的使用,实现FIR滤波器的设计和仿真。
实验器材:1.TMS320C6748DSP开发板;2.电脑;3.MATLAB软件。
实验原理:FIR滤波器是数字信号处理中常用的一种滤波器,其基本原理是利用线性相位特性实现对信号频谱的选择性抑制。
FIR滤波器的结构简单,稳定性好,并且可以实现任意的频率响应,因此被广泛应用于音频处理、图像处理等领域。
FIR滤波器的结构由延时单元、加法器和乘法器组成。
延时单元用于存储输入信号的过去值,加法器用于将输入信号和延时单元中的值相加,乘法器用于对加法器的输出进行加权求和。
根据加权系数的不同,可以实现不同的滤波特性。
在本实验中,我们使用MATLAB软件进行FIR滤波器的设计和仿真。
首先,通过指定滤波器的截止频率、通带和阻带的最大衰减等参数,使用MATLAB中的fir1函数进行滤波器的设计。
接下来,将得到的滤波器系数保存为C语言代码,通过DSP开发板进行实时滤波处理。
实验步骤:1. 在MATLAB中打开fir1函数进行滤波器设计。
根据实际需求,指定滤波器的截止频率、通带和阻带的最大衰减等参数。
通过运行代码,得到滤波器的系数。
2.将得到的滤波器系数保存为C语言代码,包括头文件和滤波函数。
7.运行程序,在DSP开发板上实时进行滤波处理,并将输出结果通过耳机进行播放。
实验结果:通过上述实验步骤,我们成功地实现了一个FIR滤波器的设计和DSP 实时处理。
通过调整滤波器参数和监听输出结果,我们观察到不同滤波器参数下得到的滤波效果不同。
通过对比实时输入信号和输出信号,我们可以清晰地看到滤波器对于输入信号频谱的选择性抑制。
实验总结:本次实验通过设计和实现FIR滤波器,加深了我们对滤波器原理和DSP芯片的理解。
通过MATLAB软件的辅助,我们可以直观地观察到滤波器在频率域的作用,对于滤波器的选择和优化提供了方便。
LPC2748用户手册
EM-LPC2478开发板使用手册第一章开发板简介 (4)1.1 LPC2478开发板主要硬件资源介绍 (4)1.2 开发板跳线和存储器地址说明 (6)1.3 外部扩展总线脚位定义 (8)1.4 用户光盘提供的开发工具和原代码 (9)1.5 开发板包括套件 (10)第二章开发板的使用和测试 (10)2.1 开发板的启动 (10)2.2 开发板基本功能的测试 (10)2.3 CAN 接口测试 (16)2.4 触摸屏测试 (16)2.5 USB Device测试 (16)2.6 GUI (17)2.7 网口测试 (17)附录一 用Flash Magic来烧写内部Flash (18)附录二 技术支持与售后服务 (25)第一章开发板简介1.1 LPC2478开发板主要硬件资源介绍系统简介:LPC24xx 开发板是我公司设计的ARM 系列开发板之一。
采用恩智浦公司基于 ARM7TDMI-S 内核,单电源供电,具有JTAG 仿真调试,ISP 编程等功能。
开发板提供了按键,LED 等常用功能部件,还具有以太网接口电路,USB HOST,USB OTG 电路(可配置成Device),SD/MMC 接口,LCD 接口,UART 接口,I2C 接口,CAN 总线接口,I2S 接口,ADC/DAC 电路。
用户也可以这些接口进行 ARM 嵌入式系统开发。
LPC24xx 开发平台兼容LPC2460 ,LPC2470,LPC2468,LPC2478(TQFP封装) 等。
用户可以在嵌入式系统开发过程中更换兼容的MCU 进行调试。
开发板兼容ULINK2 ,简易JTAG ,KEIL MDK,ADS 等开发工具,开发环境。
开发板框图:Nor FlashNXPLPC2478ARM7TDMI-S (72MHz)电源电路IIC 存储器ARM8个LED可调电位器(ADC )10M/100M NETI2S 音频接口USB OTGUSB HOSTLCD(4线触摸)UART0调试接口UART132MB SDRAM SD Card 实验区域外扩接口64MBNand Flash具体硬件配置:中央处理器── LPC2478( NXP ),ARM7TDMI-S ; 内部存储器── 512K 内部Flash ; ── 98K 的内部SRAM ; 外部存储器── 64M 外部Nand Flash ; ── 32M 的外部SDRAM ; ── 2M 的外部Nor RAM ;── 512 K 的外部SRAM (可选择) ; ── 16M 的SPI Flash (可选择) ; 串口── 两个RS232接口,串口0带自动ISP 电路 ; USB 接口── USB2.0规范,带联接状态指示灯,一个USB HOST 接口, 一个USB OTG 接口 ; LCD 接口── 支持TFT(5:6:5)LCD 接口,带Buffer 芯片(74HC244)驱动 ; ── 支持1602字符型LCD (针对LPC2468开发板适用) ; CAN 总线接口── 支持两路CAN总线 ;SD/MMC卡接口── 一个 SD/MMC卡接口 ;音频接口── 采用音频解码芯片HT28V31,可直接播放音乐 ;以太网接口── PHY芯片采用美国国家半导体的DP83848,三LED连接指示灯 ;复位电路── 一个复位按键,并采用专用复位芯片进行复位,稳定可靠 ;调试及下载接口── 一个20芯Multi-ICE标准JTAG接口,支持多种JTAG仿真器在线调试 ;电源接口── 5V直流电源输入,带电源指示灯 ;其他── 三个小按键 ;── 八个高亮LED ;── 一个蜂鸣器 ;── 外部总线全部引出,方便用户扩展 ;注:LPC2468与 LPC2478 可兼容替换使用,2478比2468 多了LCD控制器,若替换成2468,则LCD 部分不能正常使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DSP+ARM+FPGA 三核主板方案领导
TMS320C6748开发板使用手册
Revision History Revision No. Description Draft Date Remark V1.0 1.初始版本 2014/5/5 目录 前言 .............................................................................................................................................. 5 1 开发板准备 ........................................................................................................................... 6 1.1 测试开发板硬件 ........................................................................................................ 6 1.2 查看仿真器驱动是否正常安装 ................................................................................ 6 2 程序烧写 ............................................................................................................................... 7 2.1 设置工程配置文件信息 ............................................................................................ 7 2.2 测试仿真器是否正常连接 ...................................................................................... 10 2.3 加载GEL文件 ......................................................................................................... 10 2.4 CCS连接开发板CPU ............................................................................................. 12 2.5 运行GEL文件来初始化开发板 ............................................................................. 12 2.6 查看CPU版本号..................................................................................................... 13 2.7 加载和运行程序 ...................................................................................................... 14 2.8 擦除和烧写Nand Flash ........................................................................................... 14 2.9 镜像格式转换方法 .................................................................................................. 15 3 CCS工程新建和编译 ........................................................................................................ 17 3.1 新建工程 .................................................................................................................. 19 3.2 编写程序 .................................................................................................................. 22 3.3 编译和运行DSP程序 ............................................................................................. 23 4 CCS工程导入和编译步骤 ................................................................................................ 25 5 Demo例程演示 .................................................................................................................. 30 5.1 GPIO_LED ............................................................................................................... 30 5.2 GPIO_KEY ............................................................................................................... 30 5.3 TIMER ...................................................................................................................... 30 5.4 UART1_POLL ......................................................................................................... 31 5.5 UART2_INT ............................................................................................................. 32 5.6 IIC_EEPROM ........................................................................................................... 33 5.7 SPI_FLASH .............................................................................................................. 34 5.8 WatchDog ................................................................................................................. 35 5.9 NMI ........................................................................................................................... 35 5.10 PWM ..................................................................................................................... 36 5.11 ECAP ..................................................................................................................... 36 5.12 RTC ....................................................................................................................... 36 5.13 LCDC_GrLIB........................................................................................................ 37 5.14 MMCSD_ACCESS ............................................................................................... 39 5.15 SATA .................................................................................................................... 40 5.16 USB_DEV_BULK ................................................................................................ 40 5.17 ENET_HTTPD ...................................................................................................... 49 5.18 ENET_ECHO ........................................................................................................ 51 5.19 AUDIO_PLAY...................................................................................................... 58 5.20 MCBSP ................................................................................................................. 58 5.21 VPIF ...................................................................................................................... 58 5.22 EMIF_AD7606...................................................................................................... 58 5.23 uPP ........................................................................................................................ 62 5.24 FFT ........................................................................................................................ 62 6 更多支持 ............................................................................................................................. 67 7 附录Boot Mode Selection .................................................................................................. 67