声波电机工作原理
超声波电机等效电路
超声波电机等效电路介绍超声波电机是一种利用超声波技术驱动电机运动的装置,它能够实现高效、精准的动力传输。
超声波电机利用超声波振动产生电磁感应,从而驱动电机运动。
为了更好地了解超声波电机的工作原理和性能,需要进行等效电路建模。
等效电路模型超声波电机可以用等效电路模型来描述,这有助于我们更好地理解其工作原理和性能。
超声波电机的等效电路模型一般包括以下几个部分:1. 激励电源激励电源为超声波电机提供动力驱动。
它可以是直流电源、交流电源或其他形式的能量输入。
2. 超声波振荡器超声波振荡器是超声波电机的核心部件,它通过产生超声波振动,实现与电机之间的能量转换。
超声波振荡器可以采用压电材料或磁致伸缩材料。
3. 电磁感应装置超声波电机通过电磁感应装置将超声波振动转换为电磁力,从而驱动电机运动。
电磁感应装置一般由线圈和磁铁组成。
4. 电机电机是超声波电机的输出部件,它将电磁力转换为机械运动。
电机可以是直流电机、交流电机或其他类型的电机。
超声波电机的等效电路模型基于以上几个部分,可以建立超声波电机的等效电路模型。
其主要包括以下几个元件:1. 电源模型超声波电机所采用的电源可以用电源模型来描述。
对于直流电源,可以将其视为恒定电压源;对于交流电源,可以视为交流电压源。
电源模型可以用符号表示,如下所示:------|+|------V | ||-|其中,V表示电源的电压。
2. 振荡器模型超声波电机的振荡器可以用振荡器模型来描述。
振荡器模型包括一个表示振荡频率的元件,并与电源模型相连。
振荡器模型可以用符号表示,如下所示:--------|+|-----------------|+|--------| | | ||-| f |-|| |--------- ----------其中,f表示振荡频率。
3. 电磁感应装置模型超声波电机的电磁感应装置可以用电感和电阻模型来描述。
电感模型表示电磁感应装置的电感特性,电阻模型表示电磁感应装置的电阻特性。
超声波电动机.pptx

yA yB
sin cos
2π
2π
x x
sin 0t c os 0 t
(9-4)
-12-
第13页/共39页
第九章 超声波电动机
其合成为
y( x, t )
yA
yB
cos( 2π
x
0t)
(9-5)
这是一个频率为ω0、波幅为ζ、波长为λ的行波。
-13-
第14页/共39页
第九章 超声波电动机
在环形行波型超声波电动机中,定子上的压电陶瓷环 是行波形成的核心,它的电极配置如图9-6所示。
可见,在行波传播速度v为恒值的情况下, 改变激振 电压的频率f0可以快速改变转速,但存在一定的非线性。 而改变激振电压的大小,即改变行波的振幅ζ,也可以
改变转速。如果忽略压电体逆压电效应的非线性,则转 速可以随激振电压作线性变化,这是超声波电动机变压 调速的特点。
-21-
第22页/共39页
第九章 超声波电动机
h y(x,t) 2 x
πh
sin( 2π
x 0t)
(9-7)
-16-
第17页/共39页
第九章 超声波电动机 由以上两式,得
ux2 (x,t) uy2 (x,t) 1
(πh / )2 2
(9-8)
由此可见,弹性体表面上任意一点的运动轨迹为椭圆 形,这种椭圆运动使得弹性体表面质点对转子产生连续 的定向拨动作用, 且转子的运动方向与行波方向相反, 如图9-7所示。 显然,如果改变激振电源的电压极性, 便可以改变转子的运动方向。
vr
vxmax
πh0
(9-10)
-19-
负号表示转子的运动方向与行波方向相反
超声波电机的原理与应用
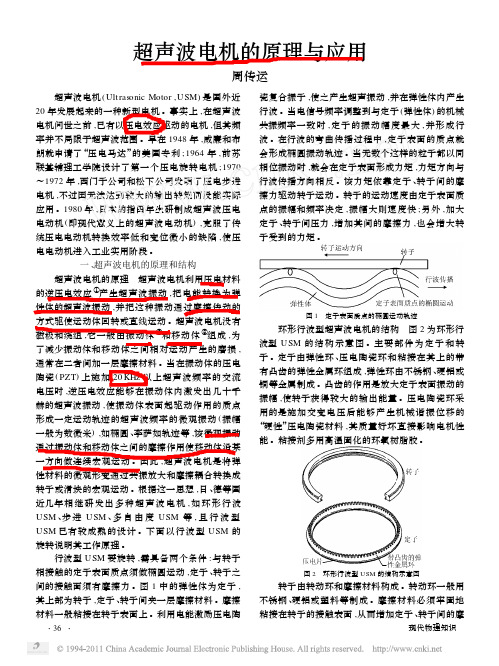
超声波电机的原理与应用周传运 超声波电机(Ultrasonic Motor ,USM )是国外近20年发展起来的一种新型电机。
事实上,在超声波电机问世之前,已有以压电效应驱动的电机,但其频率并不局限于超声波范围。
早在1948年,威廉和布朗就申请了“压电马达”的美国专利;1964年,前苏联基辅理工学院设计了第一个压电旋转电机;1970~1972年,西门子公司和松下公司发明了压电步进电机,不过因无法达到较大的输出转矩而没能实际应用。
1980年,日本的指田年生研制成超声波压电电动机(即现代意义上的超声波电动机),克服了传统压电电动机转换效率低和变位微小的缺陷,使压电电动机进入工业实用阶段。
一、超声波电机的原理和结构超声波电机的原理 超声波电机利用压电材料的逆压电效应①产生超声波振动,把电能转换为弹性体的超声波振动,并把这种振动通过摩擦传动的方式驱使运动体回转或直线运动。
磁极和绕组,它一般由振动体②和移动体③组成,为了减少振动体和移动体之间相对运动产生的磨损,通常在二者间加一层摩擦材料。
当在振动体的压电陶瓷(PZT )上施加20KHz 以上超声波频率的交流电压时,赫的超声波振动,使振动体表面起驱动作用的质点形成一定运动轨迹的超声波频率的微观振动(振幅一般为数微米),如椭圆、李萨如轨迹等,该微观振动通过振动体和移动体之间的摩擦作用使移动体沿某一方向做连续宏观运动。
因此,超声波电机是将弹性材料的微观形变通过共振放大和摩擦耦合转换成转子或滑块的宏观运动。
根据这一思想,日、德等国近几年相继研发出多种超声波电机,如环形行波USM 、步进USM 、多自由度USM 等,且行波型USM 已有较成熟的设计。
下面以行波型USM 的旋转说明其工作原理。
行波型USM 要旋转,需具备两个条件:与转子相接触的定子表面质点须做椭圆运动,定子、转子之间的接触面须有摩擦力。
图1中的弹性体为定子,其上部为转子,定子、转子间夹一层摩擦材料。
手机声音是怎么形成的原理

手机声音是怎么形成的原理手机的声音是由声波产生的,其实质是空气中的震动。
手机的声音形成的原理主要涉及到以下几个方面:声波产生、声音的放大和输出。
首先,声波产生是手机声音形成的基础。
当我们在手机上播放音乐或打电话时,手机内部的扬声器会产生声波。
声波是一种机械波,是由物体的振动引起的空气分子的连续传递,通过空气介质传播到人耳。
手机的内部结构中,有一个震动电机或扬声器单元,当手机接收到声音信号时,震动电机会受到驱动器的控制,产生震动,进而激发空气分子,形成声波。
其次,声音的放大是手机声音形成的重要环节。
手机内部有一个放大器,主要作用就是将微弱的声音信号放大,使其达到可听到的水平。
放大器会接收到声音信号,通过电子元件的调节和放大,将声音信号的强度提高,然后再将其发送给扬声器单元。
放大器一般是由一个集成电路组成,其中包括放大电路、调节电路、反馈电路等。
通过这些电路的协同作用,我们才能够在手机上听到清晰的声音。
最后,声音的输出是手机声音形成的最终过程。
手机的声音输出主要通过扬声器单元完成。
当放大器将声音信号放大后,将其输出到扬声器单元,扬声器单元会受到驱动器的控制,进行振动,激发周围空气分子,产生声波。
扬声器单元通常由声弹性振膜、电磁线圈和磁永磁石组成。
电磁线圈受到放大器中产生的电流驱动,进而产生磁场,与磁永磁石相互作用,使声弹性振膜产生振动,从而激发空气分子形成声波。
声波传播到人耳,经过人耳的感知,我们才能听到手机的声音。
值得注意的是,手机的声音形成还和手机的音频处理有关。
手机中的音频处理器可以通过对声音信号的数字处理,实现音质的改进和优化。
音频处理器通常会对音频信号进行音量调节、均衡处理、空间效果增强等。
通过这些处理,可以使得手机的声音更加清晰,高保真度,同时也可以增加用户的听觉体验。
总结起来,手机声音的形成是一个复杂的过程,涉及到声波产生、声音的放大和输出。
声波产生是基于手机内部的震动电机或扬声器单元,通过震动空气分子形成声波。
超声波电动机
人耳能感知的声音频率,约为50Hz ~20kHz之范围,因此超声波为20kHz 以上频率之音波或机械振动。超声波电 动机与传统的电磁式电动机不同,它是 利用压电陶瓷的逆压电效应,将超声振 动作为动力源的一种新型电动机,其外 形如图所示。
利用电压源驱动,发生向右方向传播的进行波 (顺转)。 B相利用电压 源进行波方向为向左传播的进行波(逆转)。下图为单压电芯片型超声波 电动机等效电路图。
二、超声波电动机的特点及应用
1. 超声波电动机的特点
(1)低速大转矩、效率高。 (2)控制性能好、反应速度快。 (3)形式灵活,设计自由度大。 (4)不会产生电磁干扰。 (5)结构简单。 (6)震动小、噪音低。
2. 超声波电动机工作原理 超声波电动机的工作是在极化的压电晶体上施加超声波频率的交
流电,压电晶体随着高频电压的幅值变化而膨胀或收缩,从而在定子 弹性体内激发出超声波振动,这种振动传递给与定子紧密接触的摩擦 材料以驱动转子旋转。
2. 超声波电动机工作原理 当使用振动材质为压电陶瓷,两个电压源以适当的间隔配置。A相
一、超声波电动机的结构和工作原理
1.超声波电动机的结构 超声波电动机一般由定子(振动部分)和
转子(移动部分)两部分组成,如图所示。该 电动机中既没有线圈也没有永磁体,其定子是 由压电晶体、弹性体(或热运动器件)、电极构 成的;转子为一个金属板,转子均带有压紧用 部件,加压于压电晶体上,定子和转子在压力 作用下紧密接触。为了减少定子、转子之间相 对运动产生的磨损,通常在两者之间(在转子 上)加一层摩擦材料。
2. 超声波电动机的应用
由于超声波电动机具有电磁电动机所不具备的许多特点,尽管 它的发明与发展仅有二十多年的历史,但超声波电动机已在照相机 的自动变焦镜头、微型飞行器、电子束发生器、智能机器人、焊接 机、轿车电气控制设备、航空航天工程、医疗理分析 2. 超声波电动机的特点和应用
超声电机原理
超声电机原理
超声电机是一种利用超声波产生的机械振动来实现运动的电机。
它具有体积小、效率高、响应速度快、噪音小等优点,因此在各种
领域得到了广泛的应用。
超声电机的工作原理主要包括超声波的产生、传播和转换成机械振动三个方面。
首先,超声电机的工作原理涉及到超声波的产生。
超声波是指
频率高于20kHz的声波,它可以通过压电效应或磁致伸缩效应来产生。
在超声电机中,常用的是压电效应。
当施加电压到压电陶瓷上时,会产生压电效应,使其产生机械振动,从而产生超声波。
这种
超声波具有高频率、短波长的特点,可以实现精细的机械控制。
其次,超声电机的工作原理还涉及到超声波的传播。
超声波在
传播过程中会受到介质的影响,不同介质对超声波的传播速度和衰
减程度都有影响。
因此,在超声电机中需要考虑介质的选择以及超
声波的传播路径,以确保超声波能够准确地传播到需要的位置。
最后,超声电机的工作原理还包括超声波的转换成机械振动。
当超声波传播到需要的位置时,可以通过压电陶瓷或磁致伸缩材料
将超声波转换成机械振动。
这种机械振动可以驱动机械装置实现运
动,如旋转、线性运动等。
由于超声波具有高频率和短波长的特点,因此可以实现微小的机械振动,从而实现精密的位置控制。
总的来说,超声电机的工作原理是通过产生、传播和转换超声
波来实现机械振动,从而实现运动控制。
它具有许多优点,如体积小、效率高、响应速度快、噪音小等,因此在精密仪器、医疗设备、光学设备等领域得到了广泛的应用。
随着科技的不断发展,相信超
声电机在未来会有更广阔的应用前景。
行波型超声波电机及其研究
行波型超声波电机及其研究超声波电机是一种新型的电机,它利用超声波的振动来驱动机械运动,具有高效率、高精度、低噪声等优点,成为了近年来研究的热点之一。
行波型超声波电机是其中的一种,其特点是具有较大的运动范围和较高的速度,而且可以实现线性和旋转运动,因此在机器人、精密加工、医疗设备等领域有广泛的应用前景。
一、行波型超声波电机的工作原理行波型超声波电机由振荡器、行波器和负载组成。
振荡器产生高频的电信号,通过行波器将电信号转换成超声波,超声波作用于负载上,使其产生机械运动。
行波器是行波型超声波电机的核心部件,它将电信号转换成超声波,并将超声波传递到负载上,其结构如图1所示。
图1 行波器的结构行波器由压电陶瓷片和金属板组成,压电陶瓷片是电能和机械能转换的元件,当施加电场时,压电陶瓷片会发生形变,产生超声波。
金属板是行波器的传导部分,它将超声波从压电陶瓷片传递到负载上。
行波器的工作原理是利用压电效应和声波在介质中的传播特性,将电信号转换成超声波,并将超声波传递到负载上,从而实现机械运动。
二、行波型超声波电机的优点1. 高效率行波型超声波电机的效率比传统电机高,因为它不需要机械传动,直接利用超声波的振动来驱动机械运动。
在高速运动时,行波型超声波电机的效率更高,可以达到90%以上。
2. 高精度行波型超声波电机的精度很高,因为它可以实现微小的运动,且不会受到机械传动误差的影响。
在精密加工、医疗设备等领域有广泛的应用。
3. 低噪声行波型超声波电机的噪声很低,因为它不需要机械传动,避免了机械传动带来的噪声。
在医疗设备、音响设备等领域有广泛的应用。
4. 大运动范围行波型超声波电机的运动范围可以很大,可以实现线性和旋转运动,且速度较快。
在机器人等领域有广泛的应用。
三、行波型超声波电机的应用1. 机器人行波型超声波电机可以实现线性和旋转运动,且速度较快,因此在机器人的关节上有广泛的应用。
行波型超声波电机还可以用于机器人的手臂、爪子等部件,实现精密的抓取和放置。
超声波马达原理

超声波马达原理超声波马达是一种利用超声波振动产生机械运动的装置,它在工业生产和科学研究中有着广泛的应用。
超声波马达具有体积小、效率高、响应速度快等优点,因此备受关注。
本文将详细介绍超声波马达的原理和工作机制。
超声波马达的原理主要基于超声波的产生和传播。
超声波是指频率高于人类听觉范围(20kHz)的声波,一般在20kHz至100MHz范围内。
超声波具有高频、短波长、能量集中等特点,因此可以产生强大的振动效果。
超声波马达利用超声波的这些特性来实现驱动装置的运动。
超声波马达通常由超声波振荡器、换能器和负载部分组成。
超声波振荡器用于产生高频的超声波信号,换能器将超声波信号转换成机械振动,负载部分则是超声波驱动的装置。
当超声波信号传送到换能器时,换能器会产生相应的机械振动,这种振动会传递到负载部分,从而驱动负载部分的运动。
超声波马达的工作机制可以分为两种类型,谐振式和非谐振式。
谐振式超声波马达利用谐振频率和换能器的共振效应来产生机械振动,其工作效率较高;非谐振式超声波马达则是直接利用超声波的振动效果来驱动负载部分,其结构简单,但效率较低。
根据具体的应用场景和要求,可以选择合适的超声波马达类型。
超声波马达在实际应用中有着广泛的用途。
例如,在医疗领域,超声波马达常用于超声波清洗机、超声波刀、超声波雾化器等设备中;在工业生产中,超声波马达被应用于超声波焊接、超声波清洗、超声波加工等领域;在科学研究中,超声波马达也被用于实验室设备、精密仪器等方面。
由于超声波马达具有体积小、响应速度快、无污染等优点,因此在现代工业和科学技术中有着重要的地位。
总之,超声波马达是一种利用超声波振动产生机械运动的装置,其原理和工作机制基于超声波的产生和传播。
超声波马达在医疗、工业、科研等领域有着广泛的应用,具有重要的意义。
随着科学技术的不断进步,超声波马达的应用范围将会更加广泛,为人类社会的发展做出更大的贡献。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
声波电机工作原理
声波电机是一种利用声波振动产生机械运动的装置。
它的工作原理基于声波的特性和电磁感应的原理。
声波电机通常由振动片、驱动电路和电磁线圈组成。
声波电机的振动片是关键部件之一。
振动片通常由压电材料制成,如压电陶瓷。
当施加电压到振动片上时,压电材料会发生形变,产生机械振动。
这种振动可以通过声波传播出去。
驱动电路是控制声波电机振动的关键组成部分。
驱动电路通常由电源、信号发生器和功率放大器组成。
电源为声波电机提供所需的电能,信号发生器产生频率和振幅可调的信号,功率放大器将信号放大到足够的电压和电流以驱动振动片。
电磁线圈也是声波电机的重要组成部分。
电磁线圈通常由导线绕成,当通过电流时,会产生磁场。
这个磁场与振动片上的磁场相互作用,从而产生力,驱动振动片振动。
通过控制电磁线圈中的电流,可以调节振动片的振动频率和振幅。
总结一下,声波电机的工作原理可以概括为:驱动电路提供电能,产生可调的信号;信号通过电磁线圈产生磁场;磁场与振动片上的磁场相互作用,产生力,驱动振动片振动;振动片的振动通过声波传播出去。
声波电机具有一些优点。
首先,它们可以实现高效能量转换,将电能转化为机械振动能量。
其次,声波电机的振动频率和振幅可以通过调节驱动电路中的信号来控制,具有较高的灵活性。
此外,声波电机没有机械接触,因此具有较长的使用寿命和较低的维护成本。
然而,声波电机也存在一些限制。
首先,由于振动片的材料和结构限制,声波电机的振动频率通常较低,一般在几十千赫兹到几百千赫兹之间。
其次,声波电机的输出功率较小,适用于一些微小精密设备或特定应用领域。
总的来说,声波电机是一种利用声波振动产生机械运动的装置,其工作原理基于声波的特性和电磁感应的原理。
通过控制驱动电路中的信号和电磁线圈中的电流,可以实现对振动片的振动频率和振幅的调节。
声波电机具有高效能量转换、灵活性和无接触等优点,但也存在振动频率和输出功率受限的限制。
随着科技的不断进步,声波电机在各个领域的应用前景将会更加广阔。