第一章 (惯性仪器测试与数据分析)概述
惯性秤实验报告
惯性秤实验报告
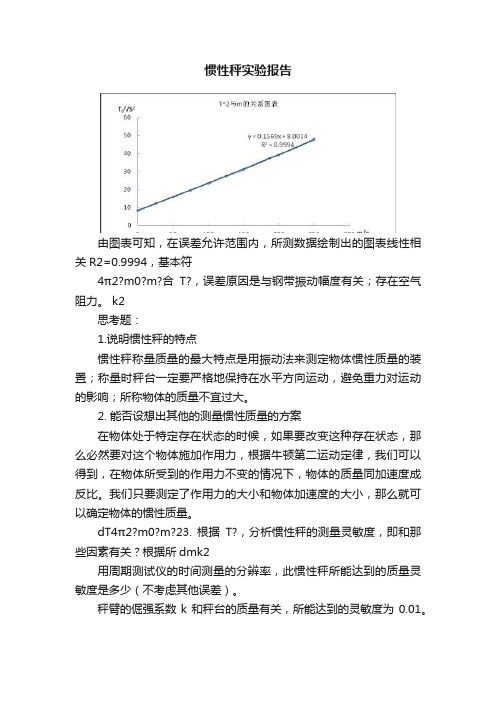
由图表可知,在误差允许范围内,所测数据绘制出的图表线性相关R2=0.9994,基本符
4π2?m0?m?合T?,误差原因是与钢带振动幅度有关;存在空气阻力。
k2
思考题:
1.说明惯性秤的特点
惯性秤称量质量的最大特点是用振动法来测定物体惯性质量的装置;称量时秤台一定要严格地保持在水平方向运动,避免重力对运动的影响;所称物体的质量不宜过大。
2. 能否设想出其他的测量惯性质量的方案
在物体处于特定存在状态的时候,如果要改变这种存在状态,那么必然要对这个物体施加作用力,根据牛顿第二运动定律,我们可以得到,在物体所受到的作用力不变的情况下,物体的质量同加速度成反比。
我们只要测定了作用力的大小和物体加速度的大小,那么就可以确定物体的惯性质量。
dT4π2?m0?m?23. 根据T?,分析惯性秤的测量灵敏度,即和那些因素有关?根据所dmk2
用周期测试仪的时间测量的分辨率,此惯性秤所能达到的质量灵敏度是多少(不考虑其他误差)。
秤臂的倔强系数k和秤台的质量有关,所能达到的灵敏度为0.01。
第六章(惯性仪器测试与数据分析)时间序列

x (h)
p k 1
ak
x
(h
k
)
w x
(h) (0)
x (m)
p k 1
ak
x
(m
k
)
研究表明,x (m) 按负指数函数衰减,理论上是无限延伸趋于0的,这种性质 称为拖尾性。
为了判断AR(p)过程的阶数,引入偏自相关系数函数定义
A)每只 i 电阻电压随时间是一条随机波动的曲线
xi (t), (i 1,2,..., N ) ——样本曲线(轨迹、现实) B)在同一特定 t j 时刻各个电阻的电压值各不相同
x1(t j ), x2 (t j ),..., xN (t j ) ——随机变量 X (t j )取值
5
一、随机过程的基本概念
自协方差函数 CX (n1, n2 ) Cov[X (n1), X (n2 )]
E{[X (n1) X (n1)][X (n2 ) X (n2 )]}
lim 1 N N
N[
i1
xi
(n1 )
X
(n1 )][xi
(n2
)
X
(n2
)]
自相关系数函数
X (n1, n2 )
CX (n1, n2 )
15
二、ARMA模型及其特点
按定义不好计算,研究发现X (k) 恰好与k阶Y-W方程的解系数 kk 完全相同
1
x (1)
...
P(X 0) 0.5
•••
P(X 1) 0.5
E( X ) 0 0.5 1 0.5 0.5
D( X ) (0 0.5)2 0.5 (1 0.5)2 0.5 0.25
惯性器件与系统测试技术实验教学大纲

惯性器件与系统测试技术实验教学大纲一、实验基本信息课程编号:201404116中文名称:惯性器件与系统测试技术英文名称:Inertial sensors and system testing课程性质:专业核心课程面向专业:测控技术与仪器开设学期:6课程总学时:40实验学时:8是否独立设课:否二、实验目的和任务目标1:通过具体的实践测量和相关实验,能达到理论联系实际、提高动手能力和应用技能,培养观察问题、分析问题及独立思考的能力,能够就复杂工程问题撰写报告和设计文稿,与业界同行及社会公众进行有效沟通和交流。
(对应指标点10-1)通过本课程的学习,使学生掌握惯性器件及系统的测试原理、测试方法,了解测试设备,具备数据分析及处理能力,培养学生对惯性器件及系统的分析能力、研究能力、测试能力、工程技术能力。
三、实验教学基本要求1、熟悉惯性器件及系统测试设备的基本原理,掌握惯性器件及系统测试方法,具备数据分析及误差处理能力;培养学生具备对惯性器件及系统的工程设计、测试、分析、研究等的科学素质;能够解决工程实际问题。
(对应目标1)四、试验教学内容、基本要求与学时分配(实验项目基本情况)五、实验教材(指导书)或网络资源[1]自编试验指导说明[2]惯导仪器测试与数据分析[M].国防工业出版社,2012.[3]姜复兴.惯导测试设备原理与应用[M].哈尔滨工业大学出版社,1998.[4]张天光译.捷联式惯性导航技术(第2版)[M].国防工业出版社,2010.六、考核方式实验部分占课程总成绩的20%,共20分。
考核主要包括三个部分:预习情况、实验操作情况、实验报告情况,各占总体的20%、20%、60%。
惯性秤实验报告(完全版)
惯性秤实验报告(完全版)首都师范大学物理实验报告实验报告总体不错!班级_____信工C班________ 组别_____F________ 姓名______郭洁_______ 学号_1111000187__ 日期_____________ 指导教师___刘丽峰__【实验题目】惯性秤【实验目的】1. 掌握用惯性秤测量物体质量的原理和方法;2. 学习惯性秤的定标和使用方法;3. 研究重力对惯性秤的影响。
【实验仪器】惯性秤及附件一套,光电控制数字计时器,米尺,天平(公用),水平仪【实验原理】【实验内容】1. 安装和调整测量系统,包括惯性秤和计时系统。
使用前要将平台C调成水平,并检查计时器工作是否正常。
首都师范大学物理实验报告2. 检查标准质量块的质量是否相等,可逐一将标准质量块置于秤台上测周期,如果各质量块的周期测定值的平均值相差不超过1%,在这里就认为标准质量块的质量是相等的,并取标准质量块的质量的平均值为此实验中的质量单位。
用所给质量大致相等的砝码作出惯性秤的定标曲线。
3. 测定以圆柱体为负载时秤的周期,并定标曲线查出该圆柱体的惯性质量。
4. 测定惯性秤的劲度系数和秤台的有效质量。
5. 将被测圆柱体悬吊于支架上,细心调整其自悬垂位置,使之恰好处在秤台中心。
测定悬点到圆柱体中心的距离 (用米尺测量)和此时秤台的周期,研究重力对系统周期的影响,验证(2-9)式是否成立。
6. 将秤臂铅直放置,测定秤臂长 (用米尺测量)和秤的周期(负载仍为圆柱体),验证(2-10)式是否成立(选做)。
7. 用天平称衡砝码和被测圆柱体的引力质量,分析它与惯性质量的关系。
【预习报告】首都师范大学物理实验报告首都师范大学物理实验报告【原始数据】砝码m(g) 0 25 50 75 100 125 150 175 小圆柱大圆柱拉线标实:小圆柱质量大圆柱质量【数据处理】砝码m(g) 0 25 50 75 100 125 150 175 小圆柱大圆柱拉线 30T1(s) 103 189.530T2(s)30T3(s)30T1(s)30T2(s) 30T3(s) 30T平均T平均T2 首都师范大学物理实验报告(kg)系列1线性 (系列1)y = + = (s2)s k b m小圆柱质量大圆柱拉线【实验数据分析】1.小圆柱本身质量是103g,用我们这种方法测出来的是102g,相差1g。
实验五惯性秤
实验五 惯性秤实验目的1.掌握用惯性秤测定物体质量的原理和方法。
2.了解仪器的定标和使用。
实验仪器惯性秤,周期测定仪,用于仪器的定标采用的标准质量块,待测圆柱体。
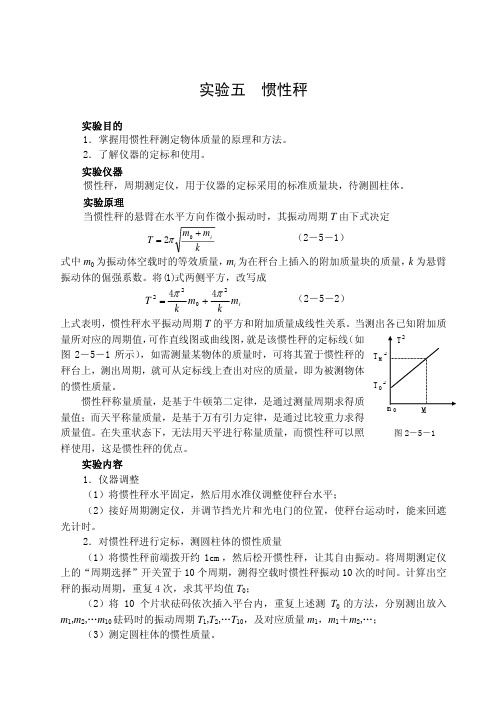
实验原理当惯性秤的悬臂在水平方向作微小振动时,其振动周期T 由下式决定 km m T i +=02π (2-5-1) 式中m 0为振动体空载时的等效质量,m i 为在秤台上插入的附加质量块的质量,k 为悬臂振动体的倔强系数。
将(1)式两侧平方,改写成i m k m k T 202244ππ+= (2-5-2) 上式表明,惯性秤水平振动周期T 的平方和附加质量成线性关系。
当测出各已知附加质量所对应的周期值,可作直线图或曲线图,就是该惯性秤的定标线(如图2-5-1所示),如需测量某物体的质量时,可将其置于惯性秤的秤台上,测出周期,就可从定标线上查出对应的质量,即为被测物体的惯性质量。
惯性秤称量质量,是基于牛顿第二定律,是通过测量周期求得质量值;而天平称量质量,是基于万有引力定律,是通过比较重力求得质量值。
在失重状态下,无法用天平进行称量质量,而惯性秤可以照样使用,这是惯性秤的优点。
实验内容1.仪器调整(1)将惯性秤水平固定,然后用水准仪调整使秤台水平;(2)接好周期测定仪,并调节挡光片和光电门的位置,使秤台运动时,能来回遮光计时。
2.对惯性秤进行定标,测圆柱体的惯性质量(1)将惯性秤前端拨开约1cm ,然后松开惯性秤,让其自由振动。
将周期测定仪上的“周期选择”开关置于10个周期,测得空载时惯性秤振动10次的时间。
计算出空秤的振动周期,重复4次,求其平均值T 0;(2)将10个片状砝码依次插入平台内,重复上述测T 0的方法,分别测出放入m 1,m 2,…m 10砝码时的振动周期T 1,T 2,…T 10,及对应质量m 1,m 1+m 2,…;(3)测定圆柱体的惯性质量。
1)将片状砝码取下,再将两个待测圆柱体分别放入平台上的圆洞内,用同样的方法测周期,用内插法从定标曲线上求两圆柱体的惯性质量;2)用天平分别测出两个被测物体的引力质量。
惯性技术、陀螺仪、加速度计
惯性技术与惯性器件简介惯性技术与惯性器件简介●惯性技术简介1.什么是惯性技术2.惯性技术基本概念3.基本惯性器件4.惯性导航特点●陀螺仪简介1.什么是陀螺仪2.陀螺仪的特性3.常用陀螺仪的指标及其意义4.常见陀螺仪的种类及特点●加速度简介1.什么是加速度计2.加速度计的特性3.常用加速度计的指标及其意义4.常见加速度计的种类及特点一惯性技术简介一惯性技术简介1.什么是惯性技术2.惯性技术基本概念3.基本惯性器件4.惯性导航特点什么是惯性物体在不受外力或所受外力平衡的条件下,维持原有运动状态(静止或匀速直线运动)不变的特性。
牛顿三大定律(惯性、加速度、作用力与反作用力)。
惯性定律成立的空间为惯性空间。
经典力学认为,要选取一个绝对静止或作匀速直线运动的参考坐标系来考察加速度,牛顿第二定律才能成立。
在研究惯性敏感器件和惯性系统的力学问题时,通常将相对恒星所确定的参考系称为惯性空间,空间中静止或匀速直线运动的参考坐标系为惯性参考坐标系。
●宏观、绝对、静止或匀速直线运动●以太●恒星●相对惯性空间稳定●指向惯性空间某点北NS●地磁北●真北●地理北地球坐标系如右图所示。
其原点取在地心;轴沿极轴(地轴)方向;轴在赤道平面与本初子午面的交线上;轴在赤道平面上,与构成右手直角坐标系。
e e e z y ox e z e x e y e z e x 地球坐标系随地球转动。
载体坐标为经度、纬度、高度。
地球上任意点的地球坐标固定不变,但是地球坐标系相对惯性空间改变。
t t t z y ox e z 地理坐标系随载体一起线运动,不随载体角转动。
地球上任意一点的地理坐标系都不相同。
地理坐标系并不唯一,有东北天、北东地等。
地理坐标系如左图所示。
其原点位于载体所在的点;轴沿当地纬线指东;轴沿当地子午线指北;轴沿当地地理垂线指上,并与构成右手直角坐标系。
平面为当地水平面。
平面为当地子午面。
t x t y t z t x t y t t y ox t t z oy载体坐标系载体坐标系如右图所示。
交大近代仪器分析课件第一章绪论PPT课件

七、定量分析方法的评价指标
一般用精密度、准确 度、检出限、灵敏度、 标准曲线的线性及线 性范围等项指标进行 评价。
精密度
精密度是指使用同一方法,对同一试样进行多次所 得结果的一致程度。
常用测定结果的标准偏差s或相对标准偏差sr度量。 重复性 同一分析人员在同一条件下平行测定结果
的精密度。 再现性 不同实验室所得测定结果的精密度。
教学参考书
➢ 分析化学(第四版),武汉大学主编,高等教育出版 社, 2000
➢ 分析化学, R.Kellner等编,李克安,金钦汉等译, 北京大学出版社,2001
➢ 21世纪的分析化学,汪尔康主编,科学出版社,1999 ➢ 分析化学的明天,梁文平,庄乾坤主编. 科学出版社
2003
凡事都要认真去做,不驰于空想, 不鹜于虚声,而唯以求真的态度去做 踏实的功夫,以此态度求学,则真理 可明;以此态度做事,则功业可就。
组分含量
1 % ~ 100%
<1% ~ 单分子、单原子
理论基础 解决问题
化学、物理化学 (溶液四大平衡)
定性、定量
化学、物理、数学、电子学、 生物等等
定性、定量、结构、形态、 能态、动力学等全面的信息
三、仪器分析分类
分
化学分析 重量分析法
滴定分析法
析 (物质的化学反应)
化
光学分析法
学
电化学分析法
仪器分析
n
(xi x)2
s i1 n 1
sr
s
100%
x
准确度
试样含量的测定值与试样含量的真实值(或 标准值)相符合的程度称为准确度。准确度 常用相对误差量度。
Er
x10% 0
灵敏度
惯性测量仪器及原理简介(4)
隧道电流型加速度计 热加速度计
目录
1.MEMS加速度计分类 2.压阻式加速度计原理 3.电容式加速度计原理
4.隧道式加速度计原理
5.热加速度计原理
2.压阻式加速度计原理
当有加速度输入时,悬臂梁在质量块受到的惯性力牵引下发生变形,导致固连的压阻膜也随 之发生变形,其电阻值就会由于压阻效应而发生变化,导致压阻两端的检测电压值发生变化,从 而可以通过确定的数学模型推导出输入加速度与输出电压值的关系。 优点:
扭摆式微加速度计的敏感单元是不对称质量平板,通过扭转轴与基座相连,基座上表面布置 有固定电极,敏感平板下表面有相应的运动电极,形成检测电容(如图3) 。当有加速度作用时, 不对称平板在惯性力作用下,将发生绕扭转轴的转动。转动角与加速度成比例关系,可用下式表 示:maL=K θ。式中,a 为输入加速度;L 为质量平板质心到支撑轴转动中心的距离;K 为支撑 轴的扭转刚度系数;θ为平板的扭转角。利用3.0节中公式,以及电极距离d和梁转动的角度θ之间 的几何关系,即可计算得到加速度。
惯性测量仪器及原理 简介(4)
苏日娜
目录
1.MEMS加速度计分类 2.压阻式加速度计原理 3.电容式加速度计原理
4.隧道式加速度计原类 2.压阻式加速度计原理 3.电容式加速度计原理
4.隧道式加速度计原理
5.热加速度计原理
1.MEMS加速度计分类
市面常见芯片 压阻式加速度计 电容式加速度计 跷跷板式电容加速度计(扭摆式硅微加速度计) 梳齿式电容加速度计 三明治式电容加速度计(悬臂梁式微加速度计)
可见,在加速度计的结构和输入电压确定的情况下(k、d、m、Vm),输出电压与加速度呈正 比关系。
3.1跷跷板摆式加速度计
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西北工业大学 自动化学院 严恭敏 2016-03
1
主要参考书目:
• 《惯性仪器测试与数据分析》,严恭敏,国防工业 出版社,2012 • 《惯性仪器测试与数据分析》,梅硕基,西北工业 大学出版社,1991 • 《惯性导航》,秦永元,科学出版社,2006 • 《惯性器件测试与建模》,毛奔,哈尔滨工程大学 出版社,2007
2
第一章 概 述
主要内容: • 一、惯性导航基本概念及其应用 • 二、惯性器件(陀螺仪和加速度计)介绍 • 三、惯性器件测试内容 • 四、本课程的主要内容与意义
3
一、惯性导航及其应用
1、惯性导航基本概念:
惯性导航是指借助于惯性技术引导运载体从起始位置 行驶至目标位置。可以将两位置之间关系看作一矢量,既 有方向又有距离长短,不论行驶的路径是直线还是曲线, 只有在合适的方向和路径长短下才能到达目标位置。 惯性技术的核心传感器是陀螺仪和加速度计。
课程意义: 惯性器件测试是一门高精密的技术,有许多繁琐和细致的工作需要 做,需要足够的耐心和细心,需要善于发现问题的敏锐眼光和解决问题 的新颖思路,它对培养严谨的科学研究精神、良好的工程实践能力和踏 实的工作作风具有重要的意义。 31
·目标点
起始点 ·
4
一、惯性导航及其应用
1、惯性导航基本概念(其它导航方法比较):
卫星导航
无线电导航
天文导航
多普勒导航
地磁匹配导航 重力匹配导航
地形匹配导航
5 景象匹配导航
一、惯性导航及其应用 2、惯性导航优缺点:
1、自主性好:不需要其它外来信息
优点 2、隐蔽性强:不会向外辐射任何信息 3、信息全面:高频率甚至连续的运载体 实时角速度、加速度、姿态、速度和位置 缺点:导航误差随时间不断积累(措施:研制高精度器件; 测试建模提高实际使用精度)
捷联惯导系统 • 惯性器件直接承受运载体的线运动和角运动 • 惯性器件的静态误差和动态误差的建模和测试都非常重要 传统机械陀螺的动态误差大,影响因素众多,建模和测试都比较复杂; 而新型陀螺,比如激光陀螺,线加速度和角速度引起的静态误差和动态 误差都很小,将成为构建捷联惯导系统的理想器件。
30
三、惯性器件测试
陀螺仪 惯性器件
加速度计:摆式陀螺积分加速度计、液浮摆式加 速度计、石英挠性摆式加速度计和硅 微加速度计等
11
二、惯性器件(陀螺仪和加速度计)介绍
2、陀螺仪:
凯尔特石 (抖退石,回旋陀螺)
(1)几种玩具陀螺
(2)框架陀螺仪
12
二、惯性器件(陀螺仪和加速度计)介绍 2、陀螺仪:
机械陀螺仪(惯性导航)的主要发展历程: 1. 1687年,牛顿提出了力学三定律,是惯性导航的理论基础; 2. 1786年欧拉创立了转子陀螺仪的力学基本原理; 巴黎国葬院 3. 1852年傅科制造了验证地球自转运动的测量装置,将其称为 Gyroscope(陀螺),由于精度低只能观察到地球自转而未能精确测 出地球自转角速度; 4. 1908年安修茨制造了世界上第一台摆式陀螺罗经; 5. 1910年修拉提出了修拉调谐原理,为惯性导航系统设计奠定基础; 6. 二战期间,德国V-2火箭采用了陀螺和加速度计组成的制导系统,但其 设计粗糙,制导精度极低; 7. 20世纪50年代美国麻省理工学院(MIT)德雷帕实验室采用液浮支承, 研制成功了单自由度液浮陀螺,60年代,液浮陀螺技术日臻完善,其 漂移达到了1×10-4º /h; 8. 60年代,英国皇家航空研究院提出了挠性支承的概念,挠性陀螺开始 出现 ; 13 9. 20世纪70年代,美国研制成了静电陀螺;
地球地球平均半径为6371300m, 其1角分对应的长度为 6371300×2π/360/60 = 1853.3 m。
1861.6 1852.2
国际上采用1852米为标准海里长 1843 度,即 1 nm = 1.852 km
弧长与纬度关系:
6 378 137 22km
SL 1852.3 9.3cos(2L)
(1)民航飞机
(2)石油测井
(3)摄影
(4)空鼠/体感遥控器
(5)智能手机
9
一、惯性导航及其应用 3、应用(民用)
Segway(赛格威)
独轮车
10
无人机
二、惯性器件(陀螺仪和加速度计)介绍 1、分类:
基于经典力学:液浮陀螺、动力调谐 陀螺、静电陀螺 服从量子力学:激光陀螺、光纤陀螺、 原子陀螺 基于微加工技术:微机械陀螺
2、陀螺仪:
斯坦福大学冷原子干涉陀螺仪
(8)原子陀螺仪 朱棣文:1997年诺奖“发明了用激光冷却 和俘获原子的方法”
巴黎天文台冷原子干涉陀螺仪 19
二、惯性器件(陀螺仪和加速度计)介绍 2、陀螺仪:
(9)微机械陀螺仪 工大要闻(2016.1.30):常洪龙教授课题组在弱 耦合微机械谐振器方面的研究取得新进展
(1)加速度计基本原理
(2)陀螺积分加速度计
21
二、惯性器件(陀螺仪和加速度计)介绍 3、加速度计:
(3)液浮摆式加速度计
(4)石英挠性摆式 加速度计
22
二、惯性器件(陀螺仪和加速度计)介绍 3、加速度计:
(5)微机械(MEMS)加速度计
23
三、惯性器件测试 1、惯性器件精度基本概念
(1)海里定义:海里原是航海上的长度单位,它指地球子午线上地理纬度 1角分的长度。海里英文为nautical mile,简写为nm。
24
三、惯性器件测试
1、惯性器件精度基本概念
(2)惯性级导航系统:在航空惯性导航行业中,将导航系统运行1h水平 定位误差优于1nm(简写成1nm/h)的惯性导航系统称为惯性级导航系统。
地球自转角速率15 º /h,其千分之一为0.015 º /h,称为毫地转率(1merumilli earth rate unit),即
4、课程主要内容与意义
本课程的基本内同包括: (1)惯性器件(单自由度转子陀螺仪、石英挠性摆式加速度计和激光陀 螺)的基本工作原理、误差分析和建模; (2)常用惯性测试设备(水平仪、平板、分度头、速率和位置转台、离 心机、线振动台和高低温温箱等)的用途和使用方法; (3)惯性器件常规试验项目的测试方法; (4)典型的数据分析和数据处理技术(回归分析、时间序列分析、频谱 分析和Allan方差分析); (5)随机系统的仿真与Kalman滤波技术; (6)捷联惯导系统和平台惯导系统的标定技术。
6
一、惯性导航及其应用
3、应用(军用)
(3)战斗机
(1)运载火箭
ห้องสมุดไป่ตู้
(2)交汇对接
(4)核潜艇
7
一、惯性导航及其应用
3、应用(军用)
(5)战略导弹
(6)陆地战车 (7)单兵武器
2015.9.3阅兵 40多种型号装备500多件、20多种型号飞机200多架,84% 首次亮相。
8
一、惯性导航及其应用 3、应用(民用)
25
三、惯性器件测试
2、惯性器件的误差模型
(1)静态误差模型:指在线运动条件下惯性仪器 的数学表达式,它确定了惯性器件误差与比力之间 的函数关系。 误差模型分类
(2)动态误差模型:指在角运动条件下惯性仪器的 数学表达式,它确定了惯性器件误差与角速度、角 加速度之间的函数关系。
(3)随机误差模型:引起惯性仪器误差的因素众多、 许多是随机的、有些机理尚不明确,应用数理统计和 模型辨识理论建立随机误差的数学表达式即为随机误 差模型。
二、惯性器件(陀螺仪和加速度计)介绍 2、陀螺仪:
(3)单自由度液浮陀螺仪 (4)挠性陀螺仪
14
二、惯性器件(陀螺仪和加速度计)介绍 2、陀螺仪:
(5)静电陀螺仪
15
二、惯性器件(陀螺仪和加速度计)介绍 2、陀螺仪:
光学陀螺仪的主要发展历程: 1. 20世纪初有人提出利用光的干涉原理测量旋转运动, 2. 1913年法国物理学家萨格奈克研制了一种光学干涉仪, 3. 1925年迈克尔逊结合干涉仪研制出了一种光学陀螺测量装置,用于测 量地球的自转角速度,但所采用的光源是普通光,相干性极差,测量 精度低; 4. 1917年爱因斯坦提出了光的受激发射理论; 5. 1960年物理学家发明了激光; 6. 1963年,美国首先向世界公布了激光陀螺概念,但直到1981年激光陀 螺才首次被用于当时新生产的波音747飞机惯导系统中,接着于1983 年开始批量生产,其间经历了长达20年的研制周期。 7. 1967年,Pircher和Hepner提出光纤陀螺概念; 8. 1976年,Vali和Shorthill进行光纤陀螺实验演示,标志着其诞生。
16
二、惯性器件(陀螺仪和加速度计)介绍 2、陀螺仪:
(6)激光陀螺仪
L
4S c
17
二、惯性器件(陀螺仪和加速度计)介绍
2、陀螺仪:
4 NS 光程差: L c
(7)光纤陀螺仪
高锟:2009年诺奖,“在纤维中传送光 以达成光学通讯的开拓成就”
18
二、惯性器件(陀螺仪和加速度计)介绍
确定性误差可通过建模和测试予以补偿。一般所指的惯性器件精度习 惯上为静态条件下测试的随机误差。
26
三、惯性器件测试
3、惯性器件测试内容
惯性器件测试:一般是指在实验室条件下,使用专门测试设备获取 仪器输出数据,通过数据确定仪表性能参数或从中分离出数学模型系数。
(1)研究性测试。根据仪表工作机理,推导各有 关参数间的关系(物理模型),通过测试发现存在 的缺陷,提出提高仪器性能水平的设计方案或改善 加工工艺。 测试分类 (2)鉴定性测试。按验收文件,确定仪表的性能参 数是否满足设计书的要求。 (3)应用性测试。通过对仪表作严格测试,掌握其误 差规律,建立描述误差特性的数学模型,通过误差补 偿提高仪表的使用精度。